


分类
其他
550W小智AI生态中枢组装教程
简介
本教程适用于 立创开源广场·大道至简 开源作品 《流浪地球 550W(MOSS)小智AI生态中枢》的组装。
简介:本教程适用于 立创开源广场·大道至简 开源作品 《流浪地球 550W(MOSS)小智AI生态中枢》的组装。本教程适用于 立创开源广场·大道至简 开源作品 《流浪地球 550W(MOSS)小智AI生态中枢》的组装。
- 作品展示视频:https://www.bilibili.com/video/BV1p1a1zwEht/#reply273687806929
- 项目开源链接: https://oshwhub.com/zk272761180/wandering-earth-550w
开源不易,您的支持是我前进的最大动力!

1. 前言
在整个项目的复刻期间,本教程的建议阅读应用阶段为: PCB 焊接完成、固件烧录并调试完成,系统稳定正确运行;外壳打印完成;所有材料购买准备完成。各部分组装前的命名及分类如下:
1.1 已完成的 PCB 部分
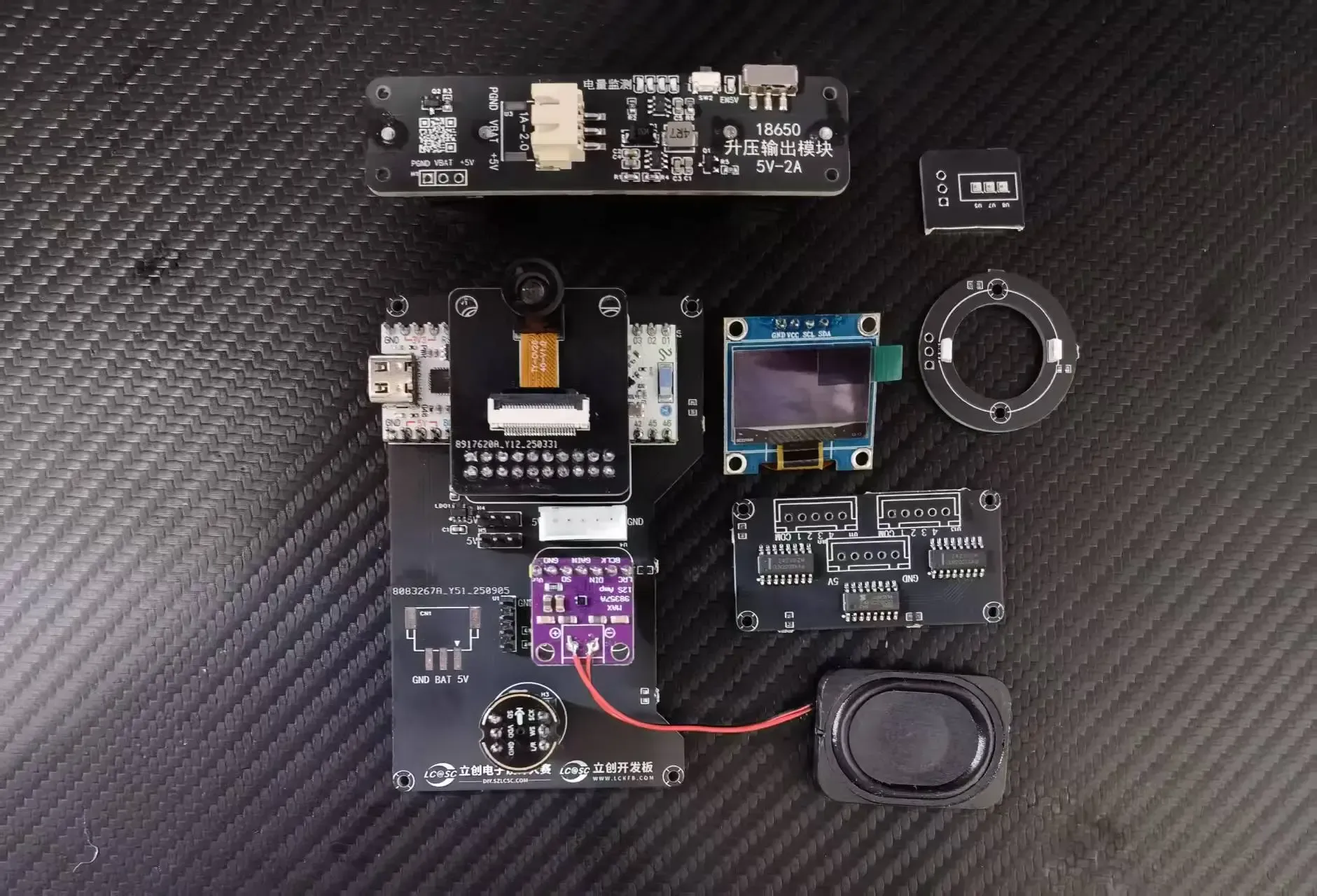
- 包含:
- 主板(焊接开发板、插接麦克风和音频输出模块);
- AI 视觉模块(焊接并调试完成可用,此模块焊接最容易出问题);
- 18650 电池供电板(确保升压正常);
- 电机驱动板;
- 1313 灯组(方形)、4020 灯组(圆环形);
- OLED 模块。
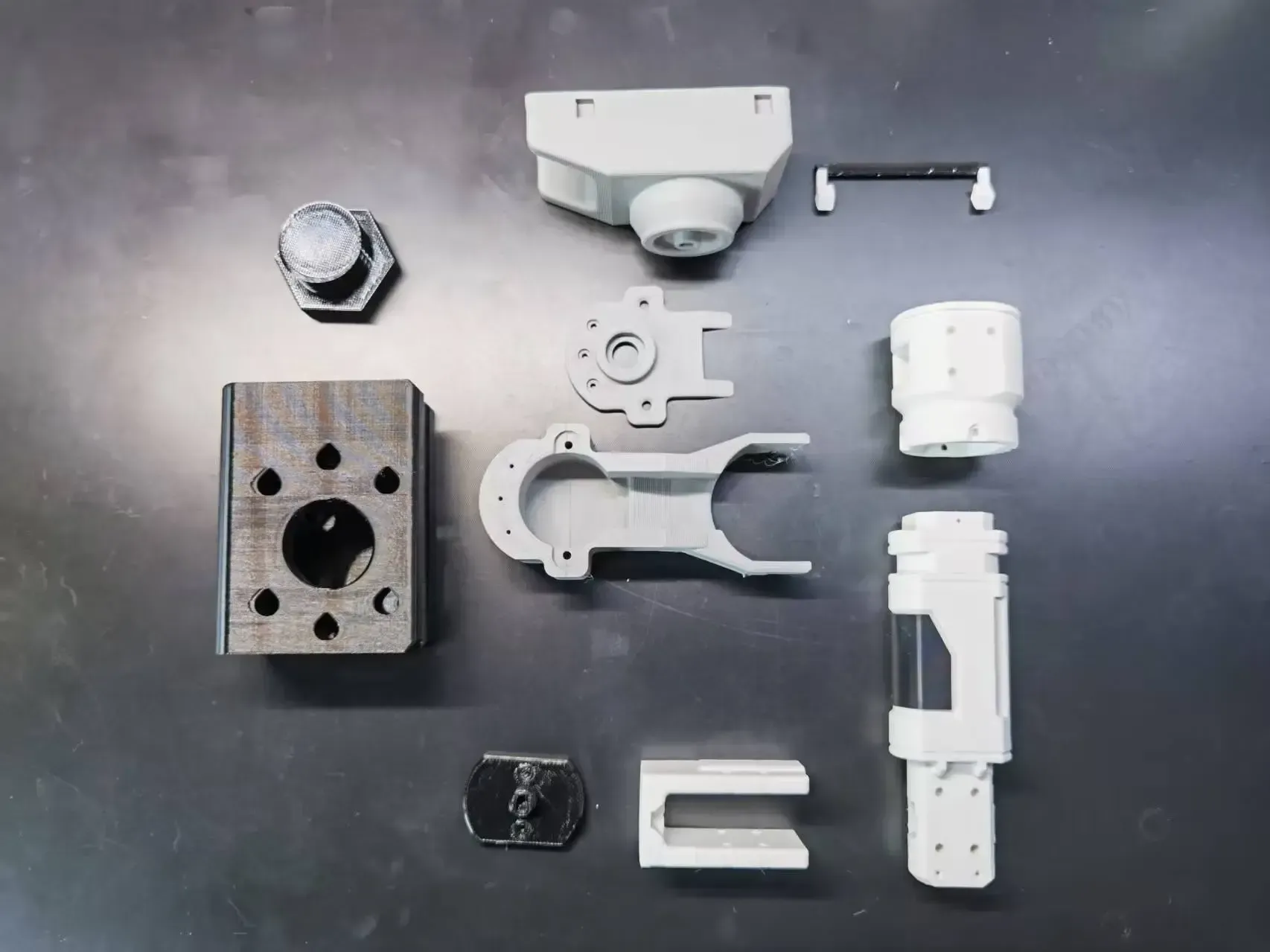
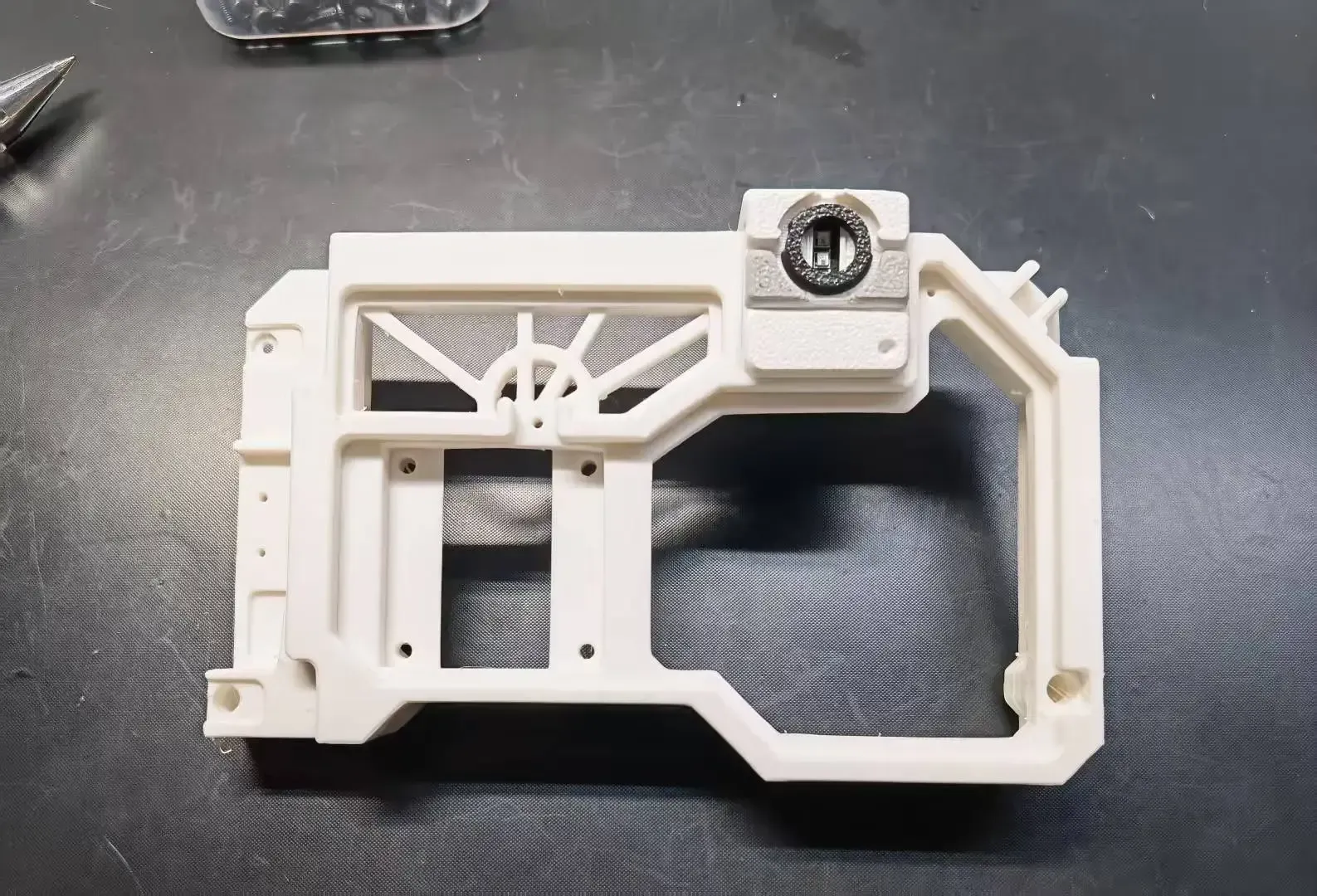
1.2 已打印完成的外壳部分
1.2.1 主机部分

- 包含:
- 上部:摄像头固定件、主机前盖装饰、主机前盖、主机前框架;
- 下部左侧:主机中间壳、主机底壳;
- 下部右侧:正面灯组盖、右下装饰挂件、正面下部装饰挂件、电池固定支座。
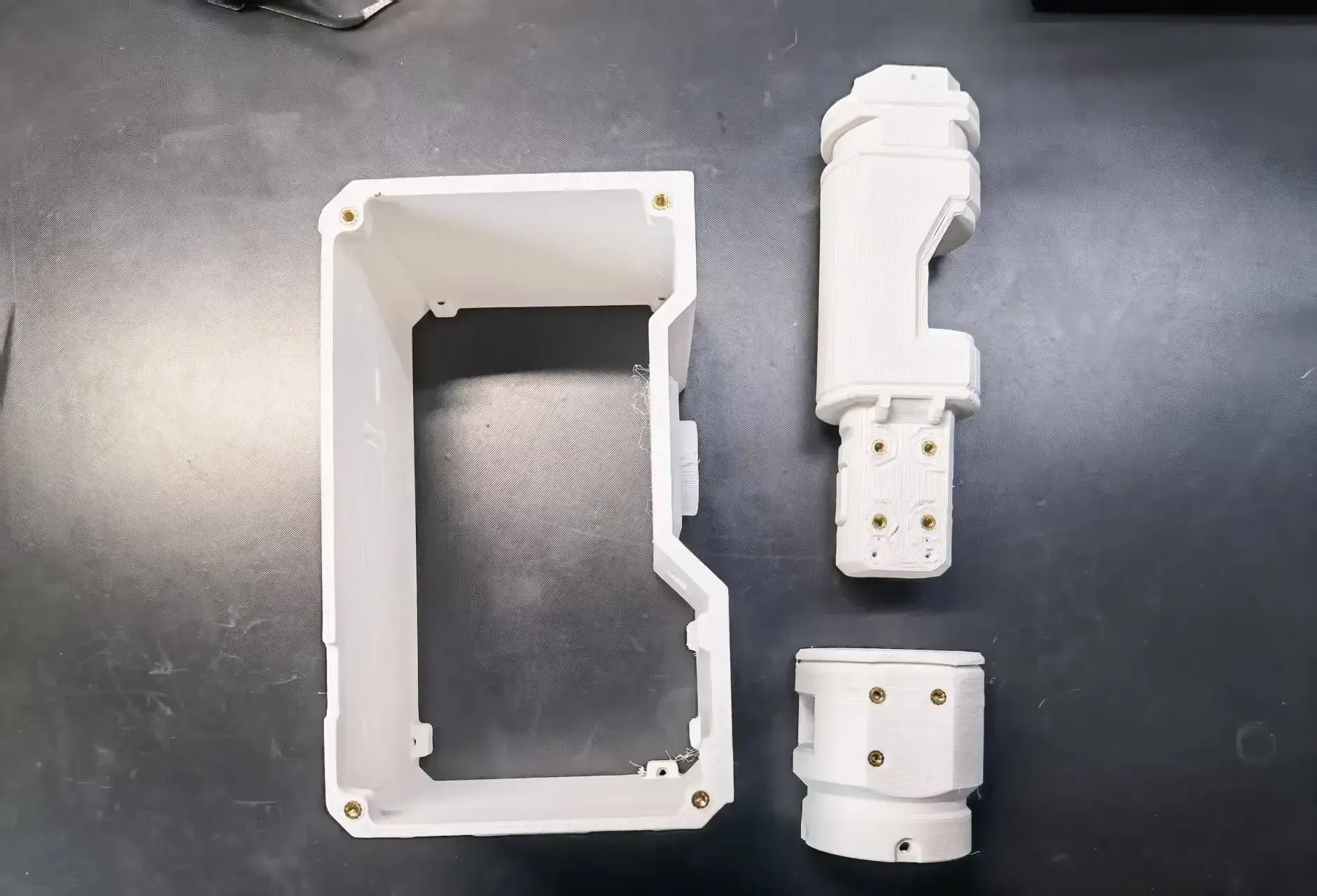
1.2 机械臂部分
- 包含:
- 左侧:固定支座(螺帽锁紧,用于固定在 18mm 后板子上,如柜体板,其他固定方式需自行制作转接件);
- 中间:顶部支座(及装饰)、机械臂 1(顶部横向放置)、机械臂 3(底部横向放置);
- 右侧:机械臂 2(垂直放置)。
1.3 组装主要分为四个部分:
-
PCB 安装
-
电机安装
-
机械臂组装
-
主机组装
各部分组装时的螺丝辅材使用量如下,请自备 M2 和 M3 内六角螺丝刀、M3 十字螺丝刀:
| 步骤 | 材料 | 数量 | 部分 | 内容 |
|---|---|---|---|---|
| 1 | M233滚花铜螺母 | 22 | PCB安装 | 主机外壳和机械臂2预埋滚花螺母 |
| 2 | M2*5内六角螺丝(自攻) | 4 | PCB安装 | PCB主板安装在主机底壳 |
| 3.1 | M2*8内六角螺丝(非自攻) | 4 | PCB安装 | PCB电机驱动板固定在主机中间壳 |
| 3.2 | M2六角螺母 | 4 | PCB安装 | PCB电机驱动板固定在主机中间壳 |
| 4 | M2*5内六角螺丝(自攻) | 4 | PCB安装 | 18650供电PCB支架组装 |
| 5 | M2*8内六角螺丝(自攻) | 4 | PCB安装 | 18650供电PCB固定在主机中间壳 |
| 6.1 | M3*10内六角螺丝(非自攻) | 2 | 电机安装 | 安装主机电机并压入轴承 |
| 6.2 | M3六角螺母 | 2 | 电机安装 | 安装主机电机并压入轴承 |
| 6.3 | MR128ZZ轴承(内8外12厚3.5) | 1 | 电机安装 | 安装主机电机并压入轴承 |
| 7.1 | M3*12平头十字螺丝(自攻) | 2 | 电机安装 | 安装机械臂1电机并压入轴承 |
| 7.2 | M2*8平头十字螺丝(自攻) | 3 | 电机安装 | 安装机械臂1电机并压入轴承 |
| 7.3 | MR128ZZ轴承(内8外12厚3.5) | 1 | 电机安装 | 安装机械臂1电机并压入轴承 |
| 8 | M2*8内六角螺丝(非自攻) | 6 | 机械臂组装 | 组装机械臂1和臂2 |
| 9 | M2*8内六角螺丝(自攻) | 4 | 机械臂组装 | 组装机械臂2主体和连接件 |
| 10.1 | M2*8内六角螺丝(非自攻) | 1 | 机械臂组装 | 组装机械臂1和顶支座 |
| 10.2 | M2六角螺母 | 1 | 机械臂组装 | 组装机械臂1和顶支座 |
| 11 | M3*12平头十字螺丝(自攻) | 6 | 机械臂组装 | 组装顶支座和固定座 |
| 12.1 | M2*8内六角螺丝(非自攻) | 2 | 机械臂组装 | 组装机械臂3主体和连接件 |
| 12.2 | M2六角螺母 | 2 | 机械臂组装 | 组装机械臂3主体和连接件 |
| 13 | M2*8内六角螺丝(非自攻) | 4 | 主机组装 | 组装主机底壳和中间壳 |
| 14 | M2*8平头十字螺丝(自攻) | 2 | 主机组装 | 组装摄像头模组 |
| 15.1 | M2*8内六角螺丝(非自攻) | 1 | 主机组装 | 组装主机电机和机械臂3 |
| 15.2 | M2六角螺母 | 1 | 主机组装 | 组装主机电机和机械臂3 |
| 16 | M2*5内六角螺丝(自攻) | 3 | 主机组装 | 组装主机右下部装饰挂件 |
| 17 | M2*8内六角螺丝(非自攻) | 8 | 主机组装 | 组装机械臂2和机械臂3 |
| 18.1 | M2*8内六角螺丝(非自攻) | 1 | 主机组装 | 组装主机中间壳和前盖框架 |
| 18.2 | M2*5内六角螺丝(非自攻) | 3 | 主机组装 | 组装主机中间壳和前盖框架 |
| 19 | M2*5内六角螺丝(自攻) | 3 | 主机组装 | 安装主机前盖板 |
| 20 | M2*5内六角螺丝(自攻) | 2 | 主机组装 | 组装主机正面下部装饰挂件 |
2. PCB 安装
2.1 预埋滚花螺母
使用刀头电烙铁将M233滚花铜螺母预埋至主机外壳、机械臂2。


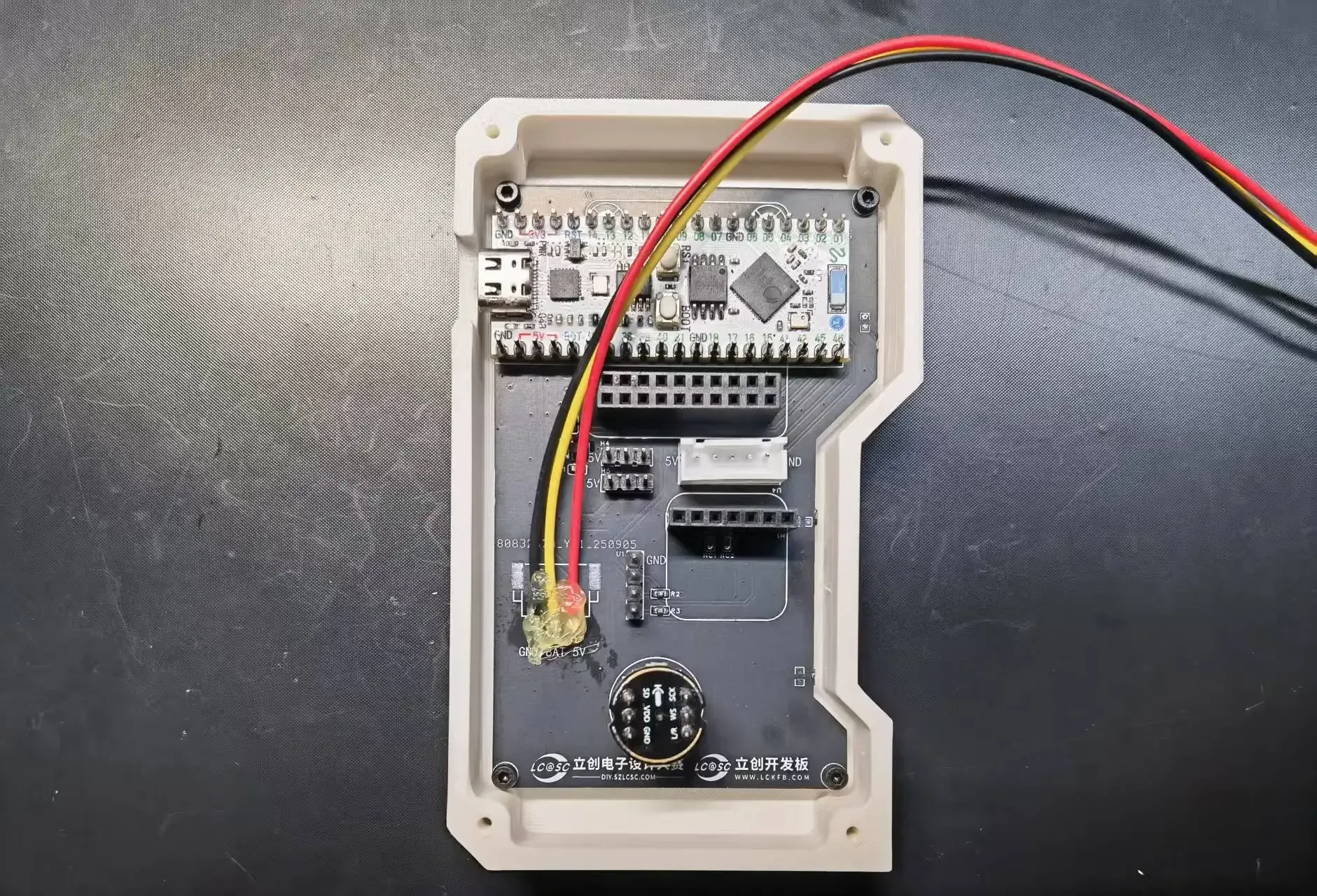
2.2 安装主板 MainBoard(MB)
使用M2*5内六角螺丝(自攻)将 MB 固定在主机底壳。
2.3 安装电机驱动板
使用M2*8内六角螺丝(非自攻)、M2六角螺母将PCB电机驱动板固定在主机中间壳。
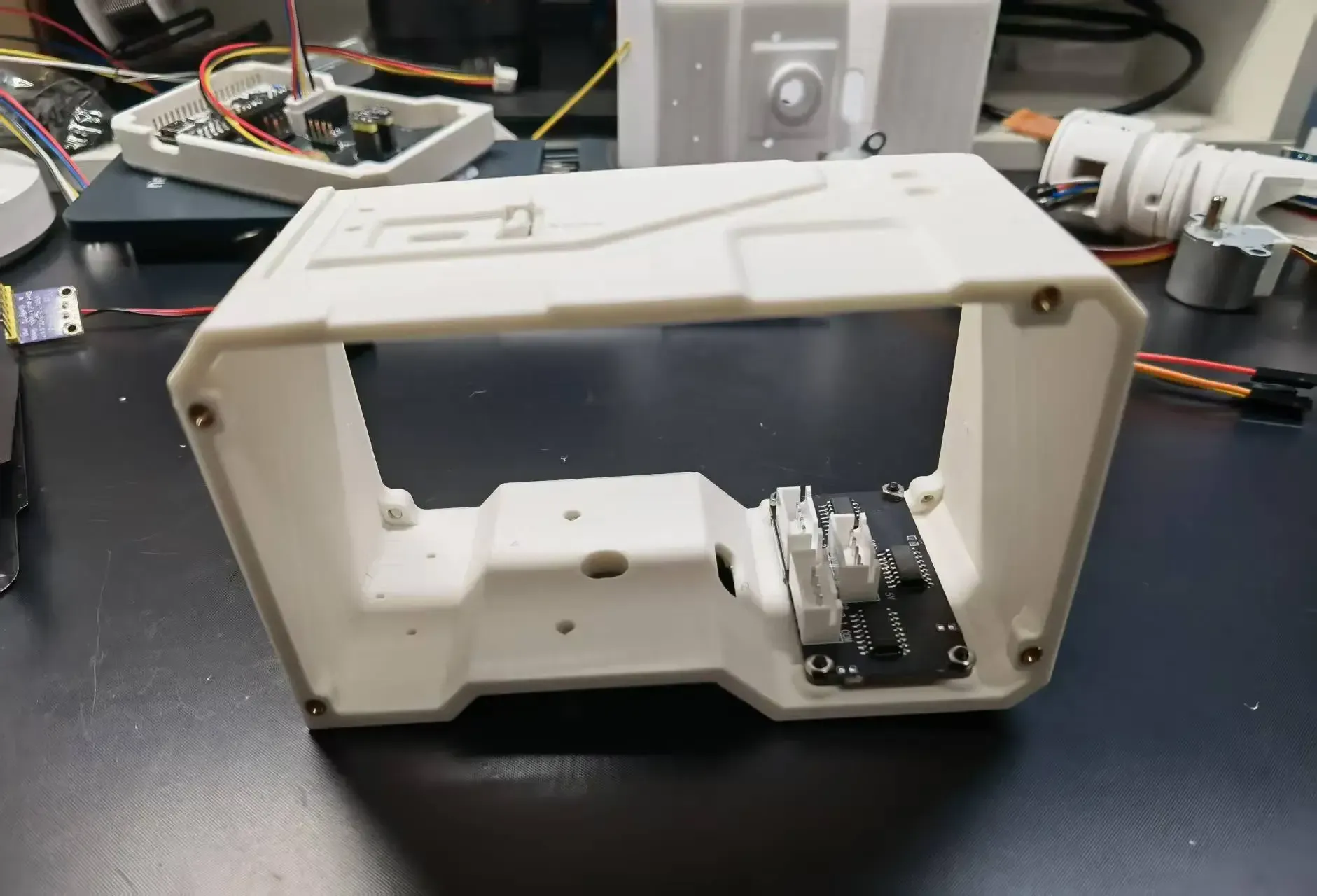
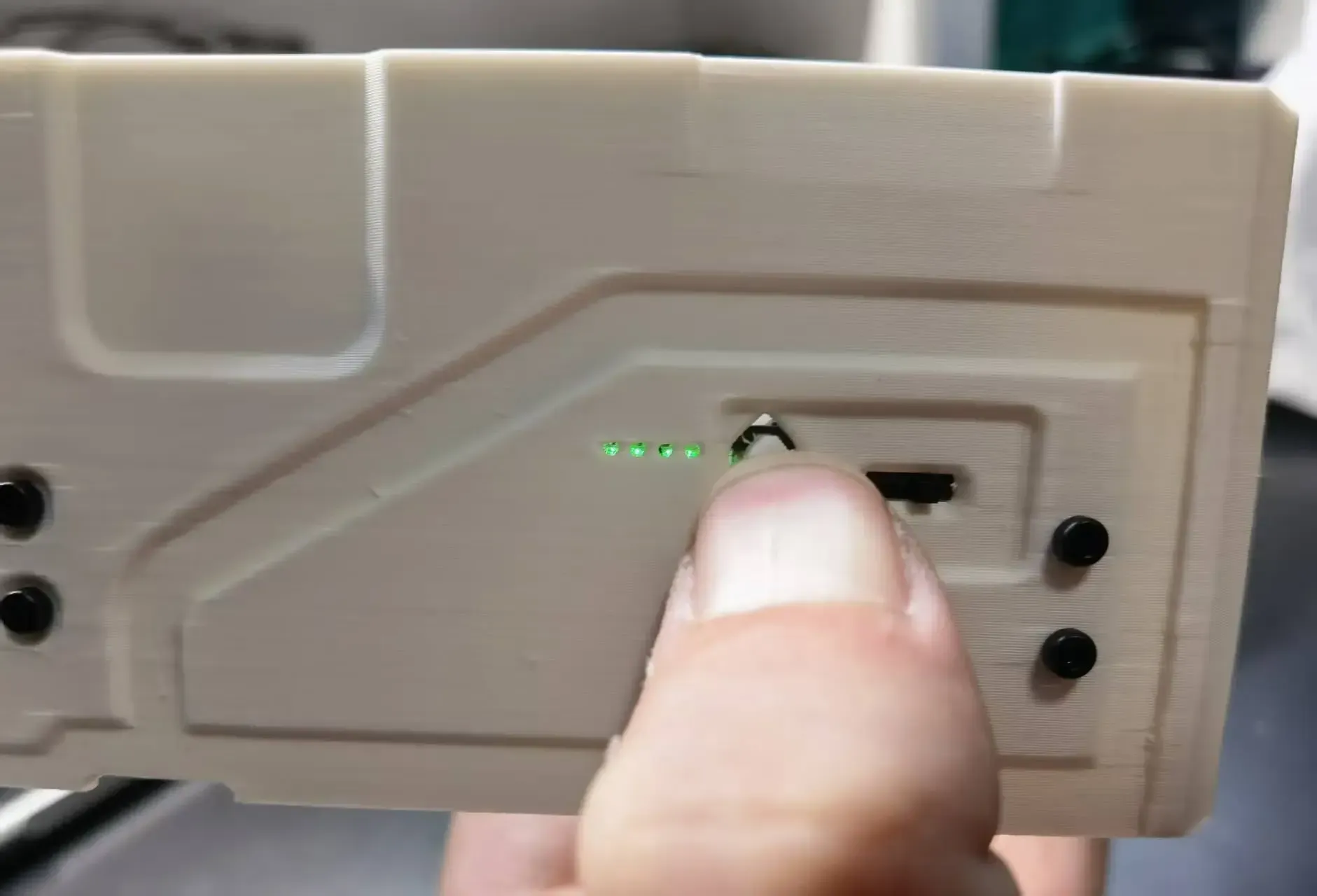
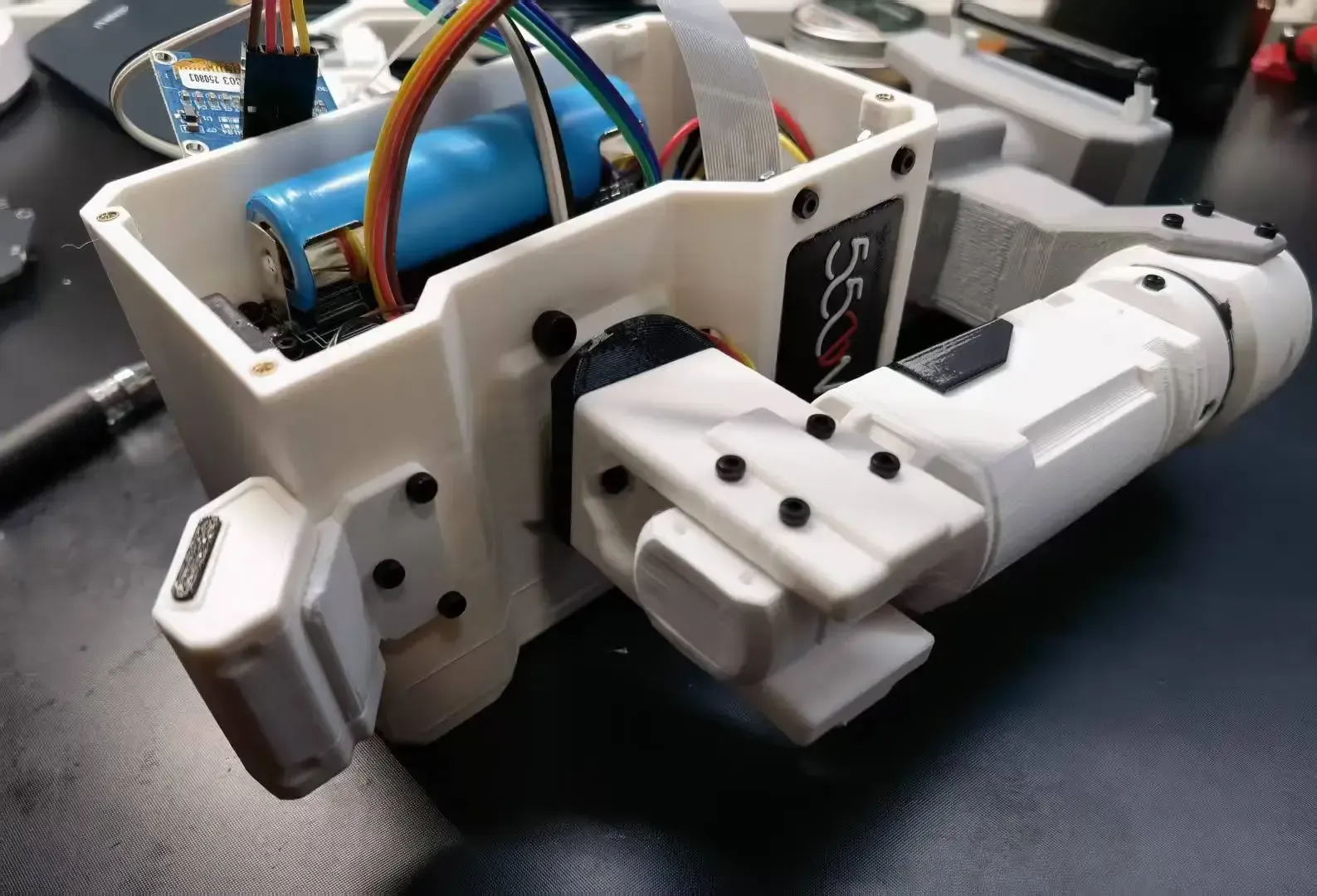
2.4 安装18650供电模块
使用M2*5内六角螺丝(自攻)将18650供电PCB 安装在支架上面。
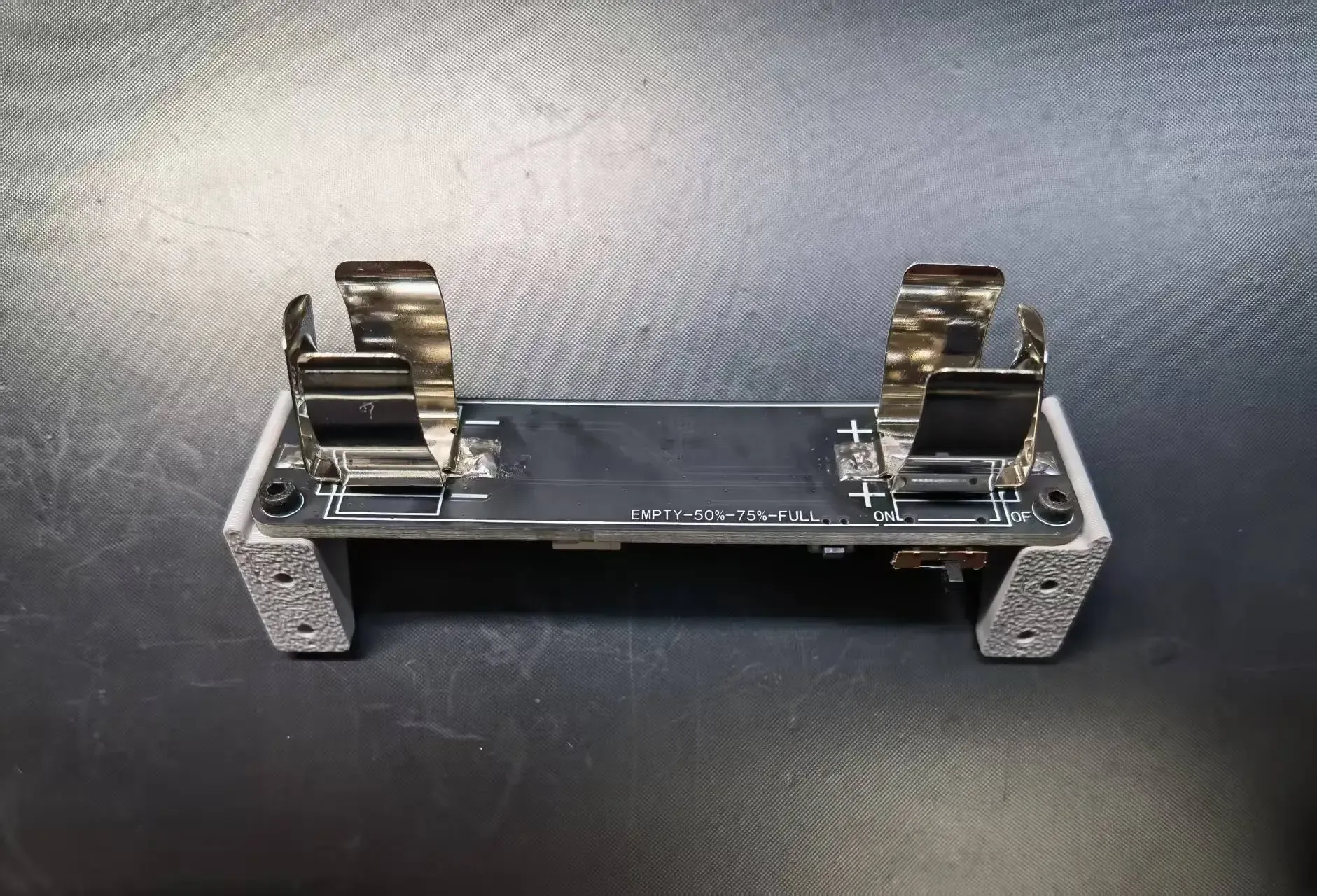
使用M2*8内六角螺丝(自攻)将供电模块及支架固定在主机中间壳。
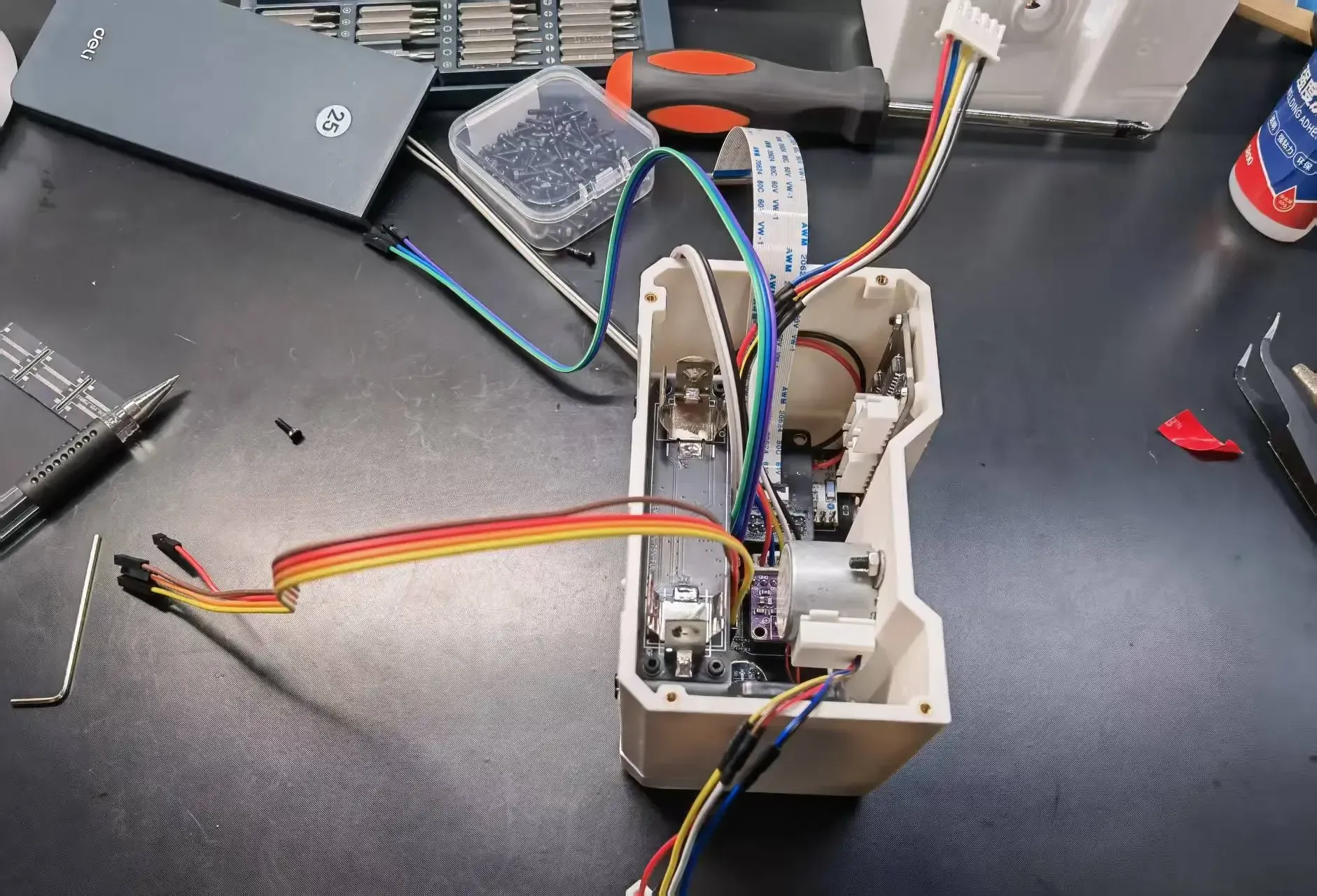
- 顶部视图如下:
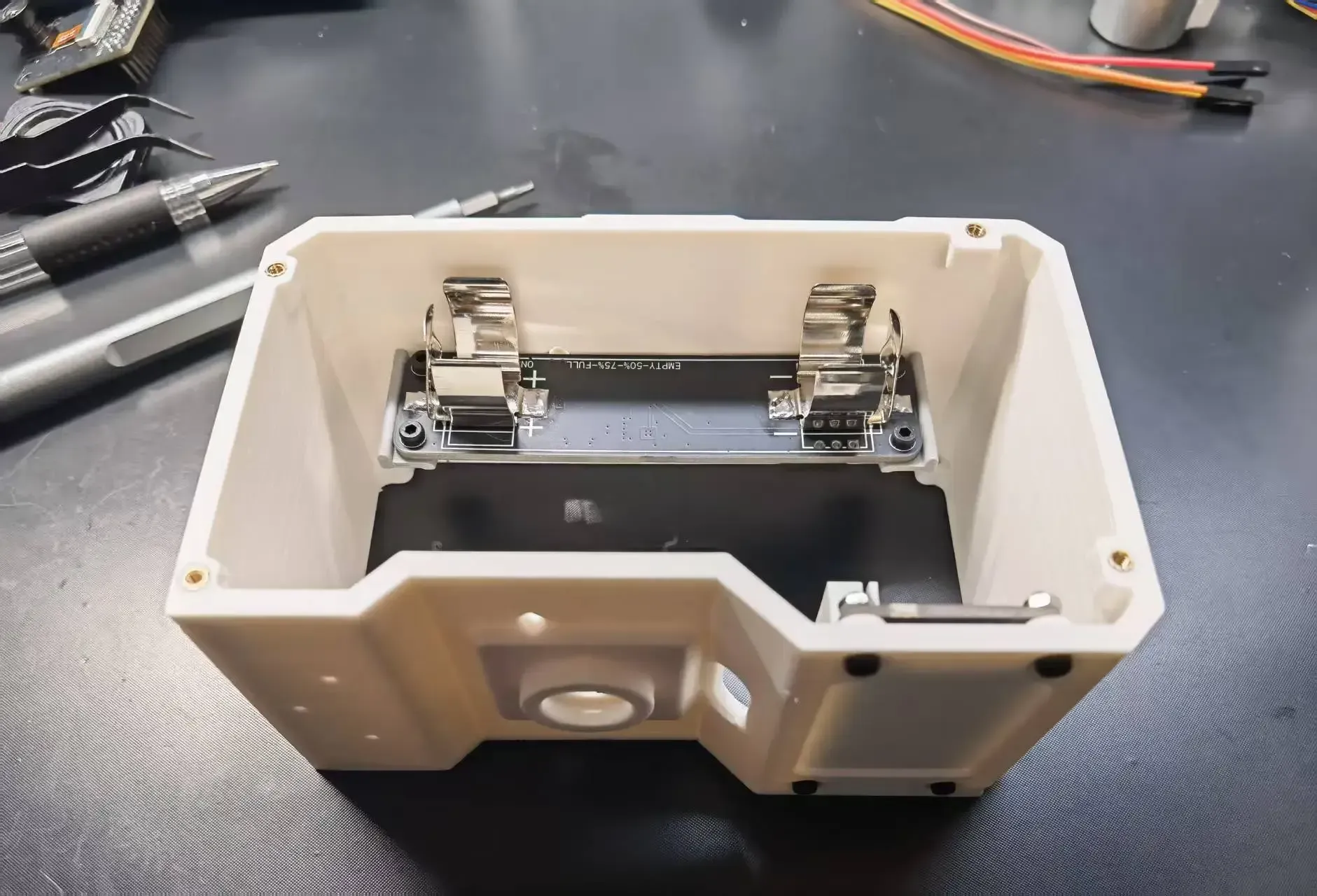
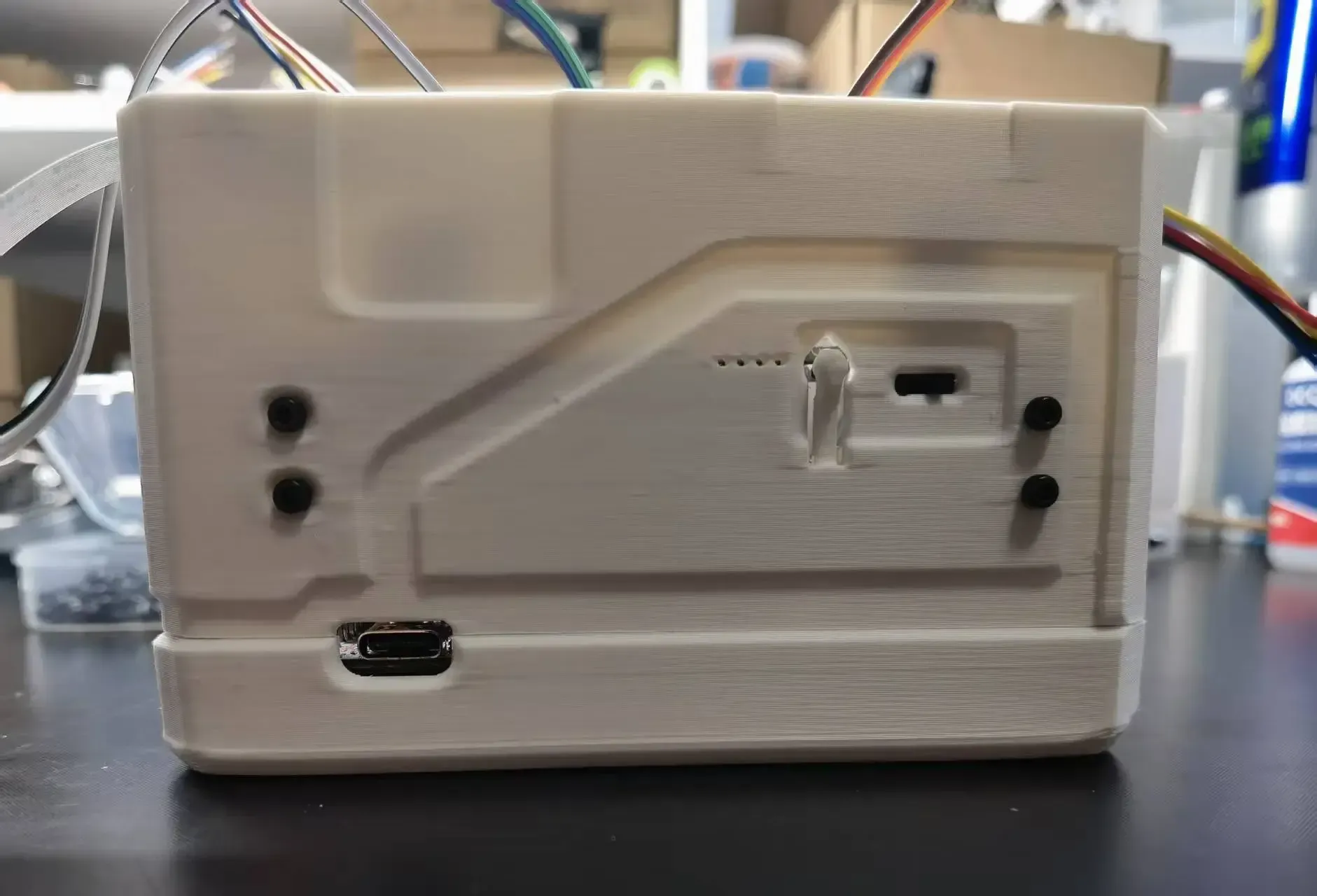
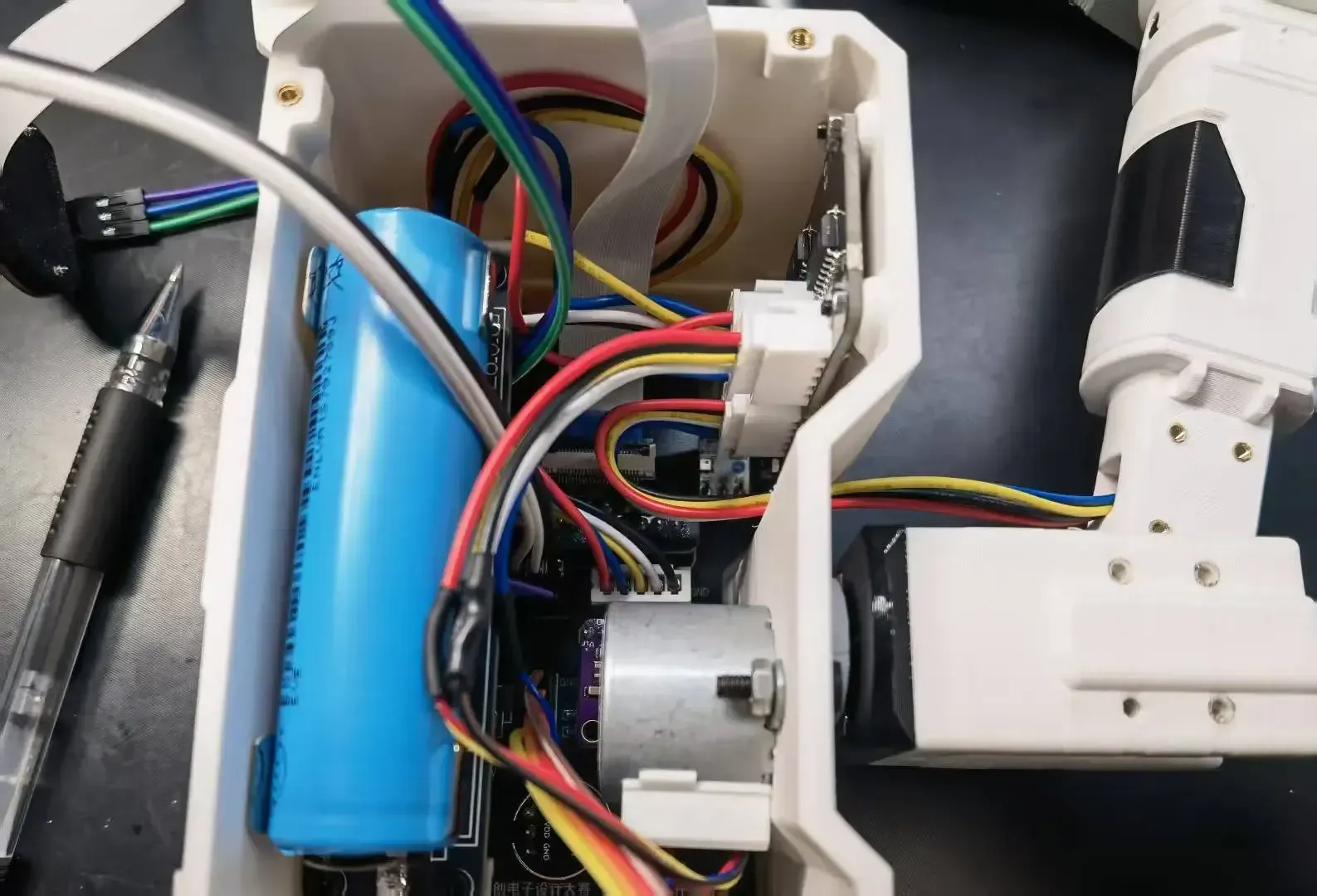
- 底部视图如下:
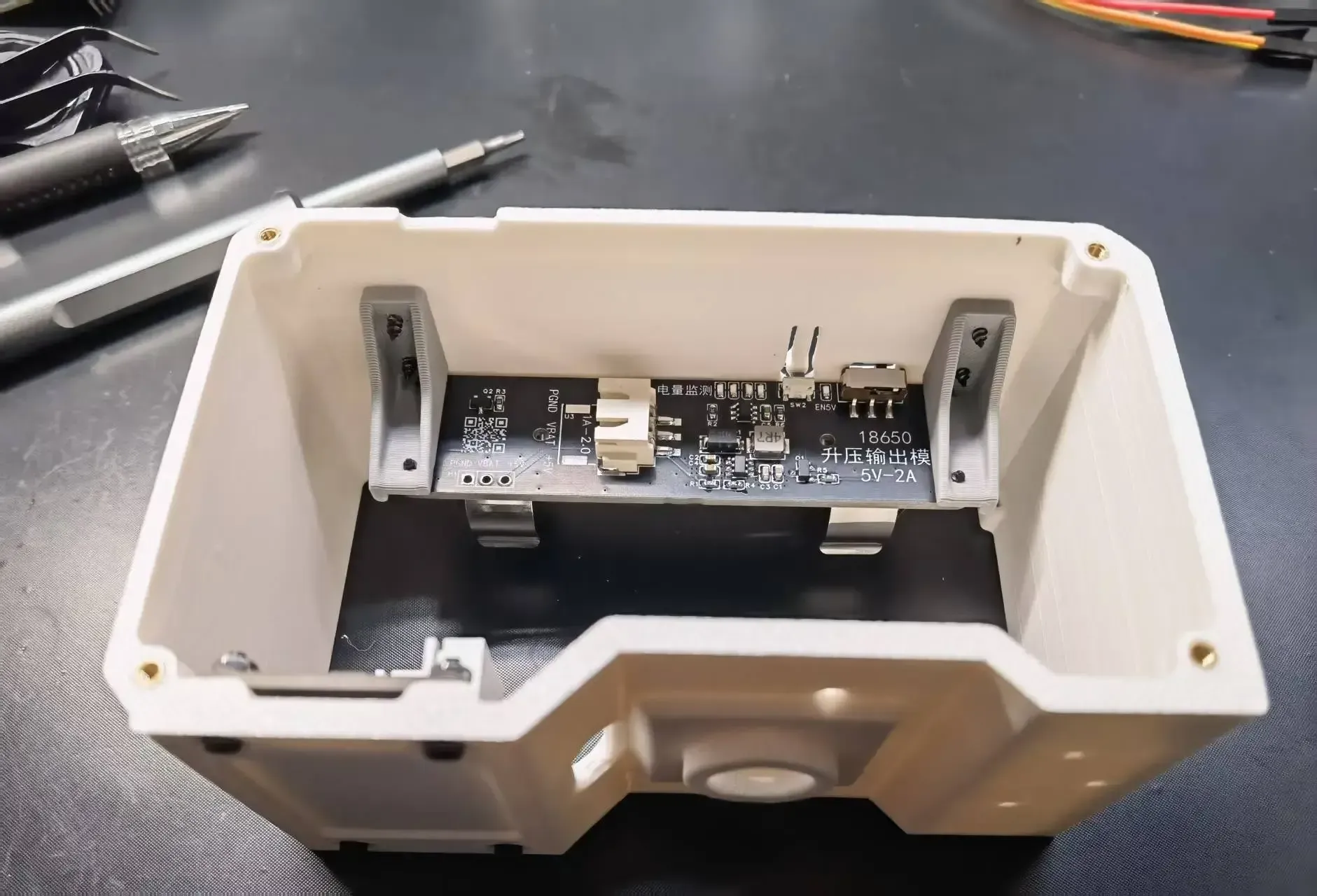
- 左侧视图如下:

注意:略调整安装位置使开关和按钮正常使用。
3. 电机安装
3.1 安装主机电机
使用M3*10内六角螺丝(非自攻)和M3六角螺母将 24 步进电机固定在主机中间壳上。
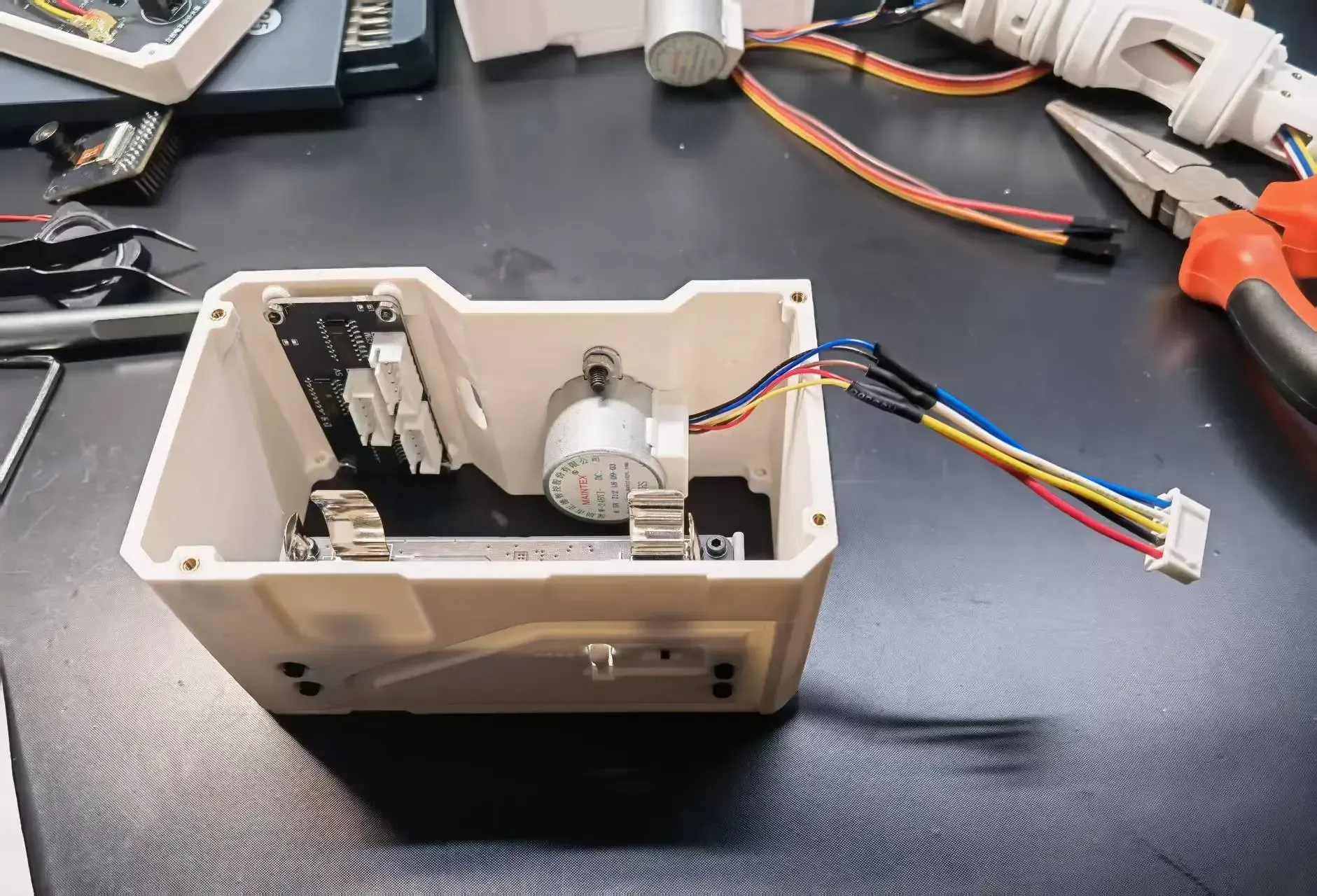
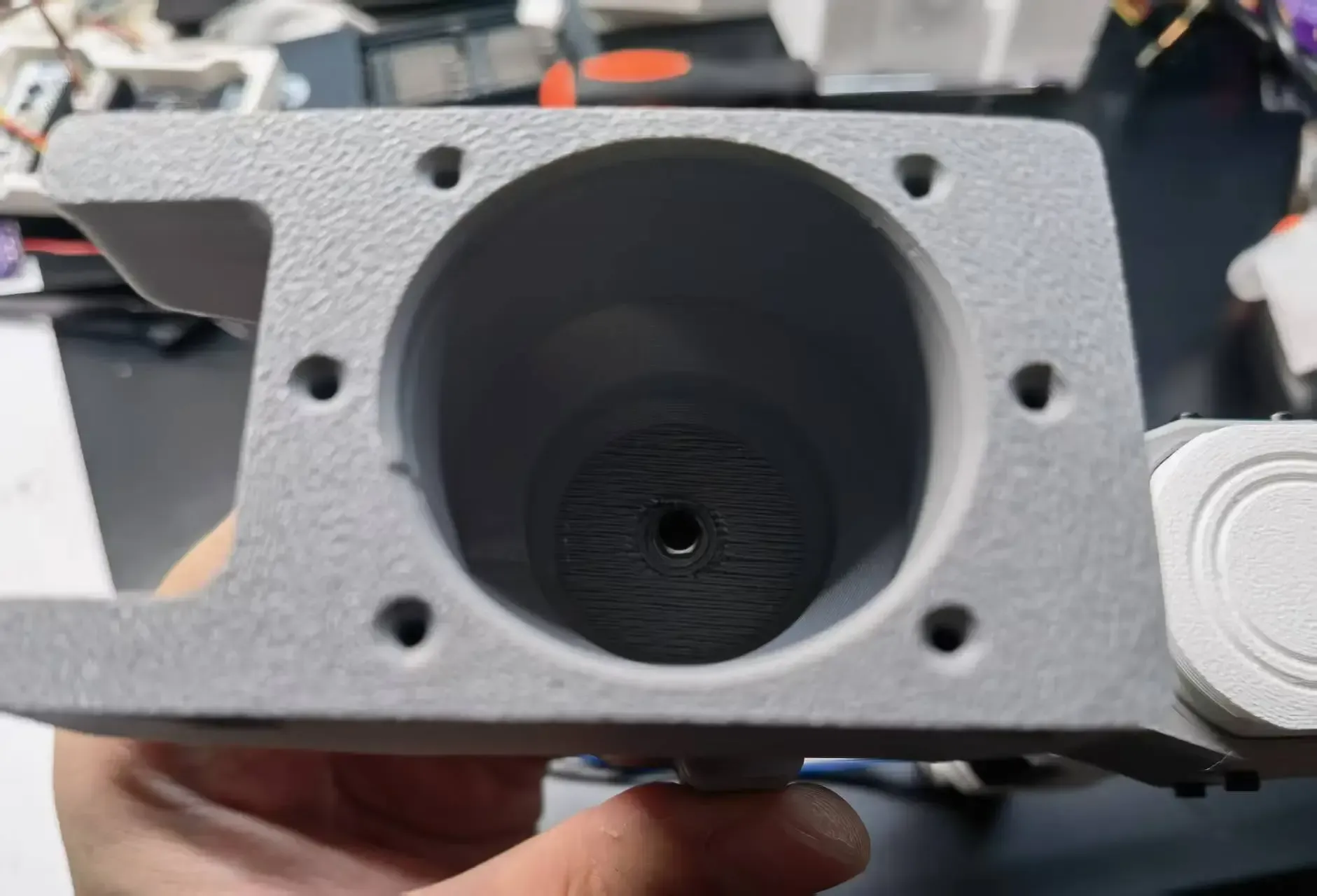
将MR128ZZ轴承(内8外12厚3.5)压入主机中间壳右侧的轴承槽内。手压比较困难时可以使用 PCB 按进去,或者略微加热轴承软化外壳。安装后轴承外侧应紧紧连接外壳不松动。
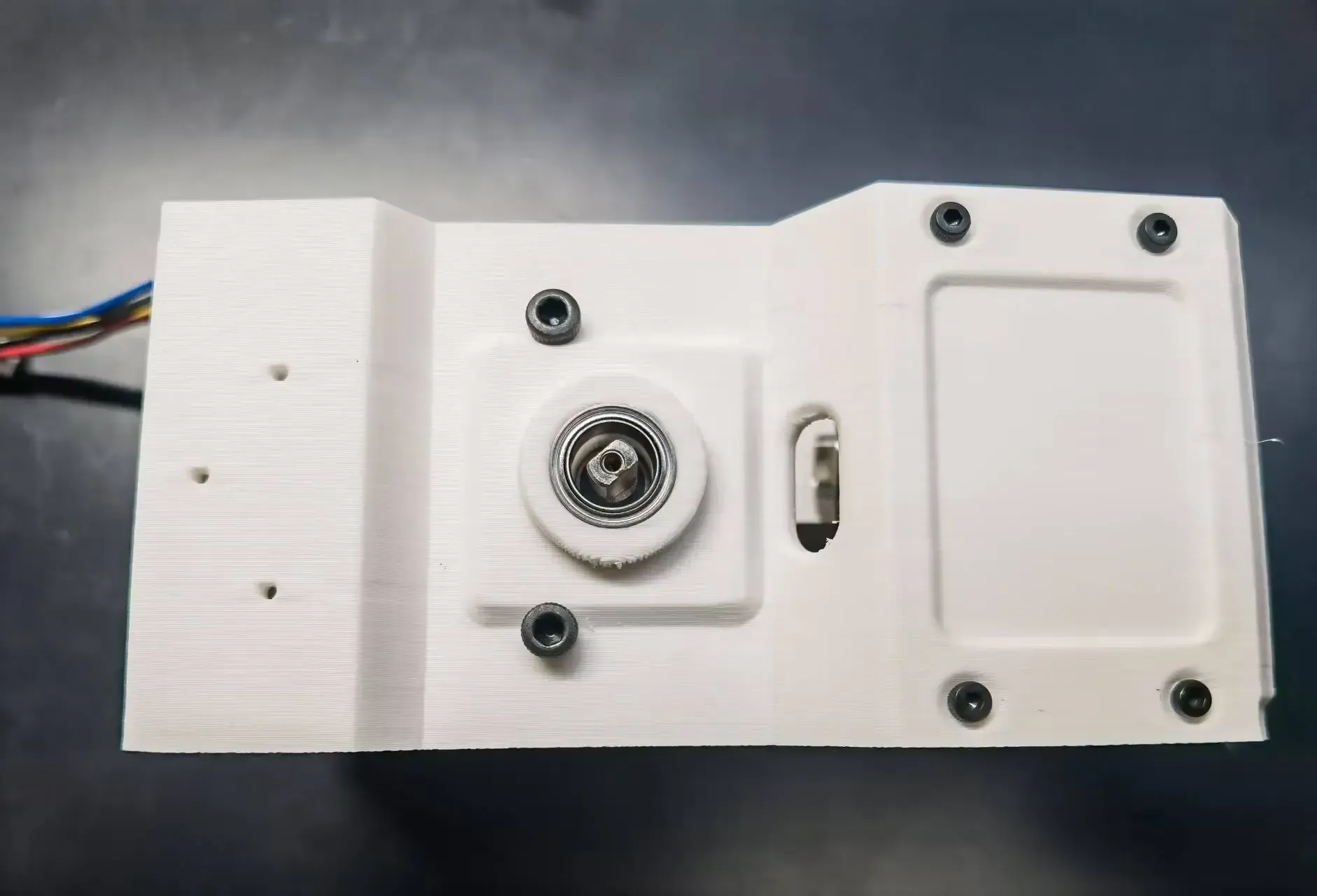
3.2 安装顶部电机
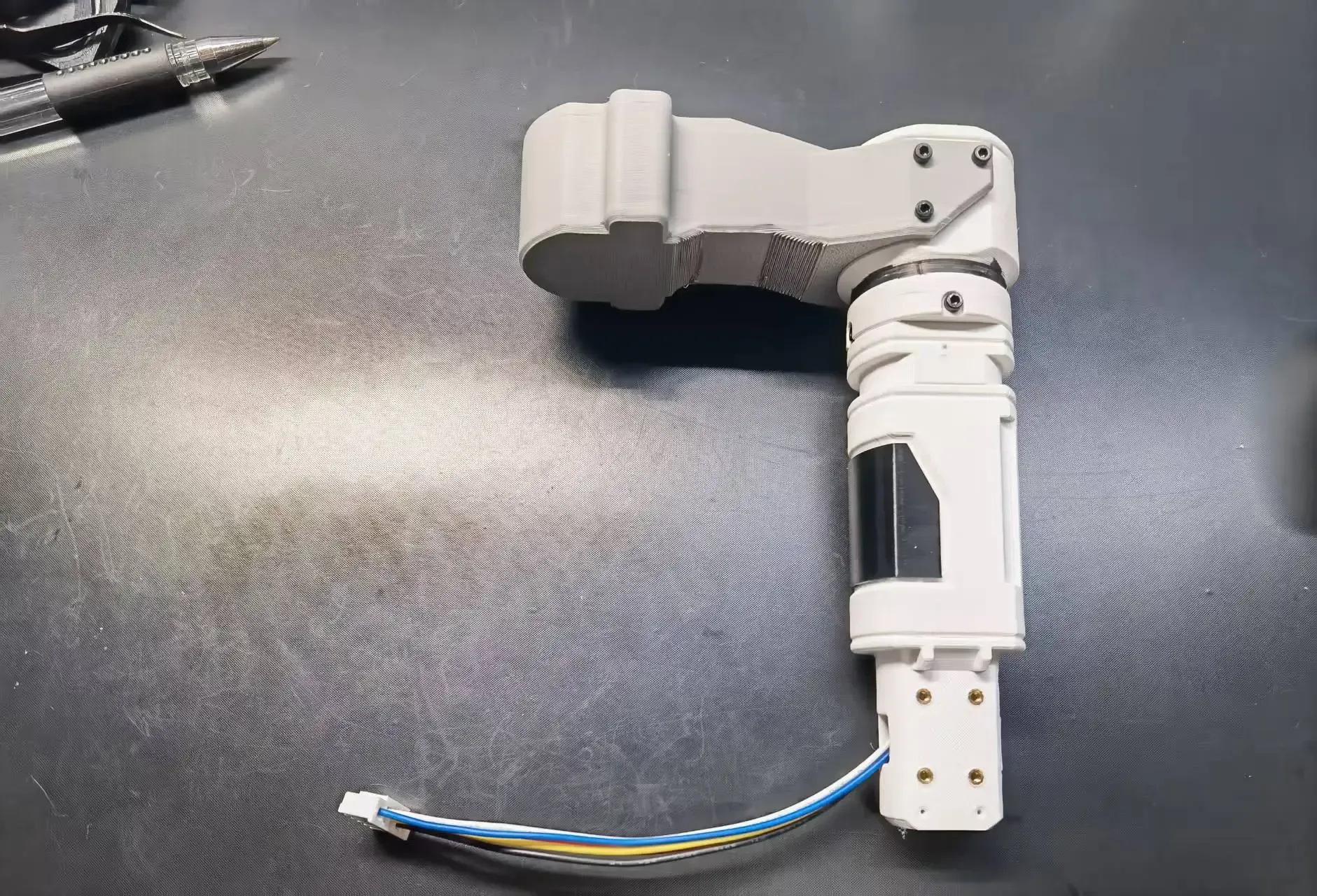
将电机放入机械臂 1 主体中,盖上上盖保持电机轴在上盖圆孔中间。使用十字螺丝刀将M312平头十字螺丝(自攻)和M28平头十字螺丝(自攻)固定盖体。将MR128ZZ轴承(内8外12厚3.5)压入机械臂 1 上盖。
将 XH2.54-5P 单头导线穿过机械臂 2 的上下两部分,准备主机接线。
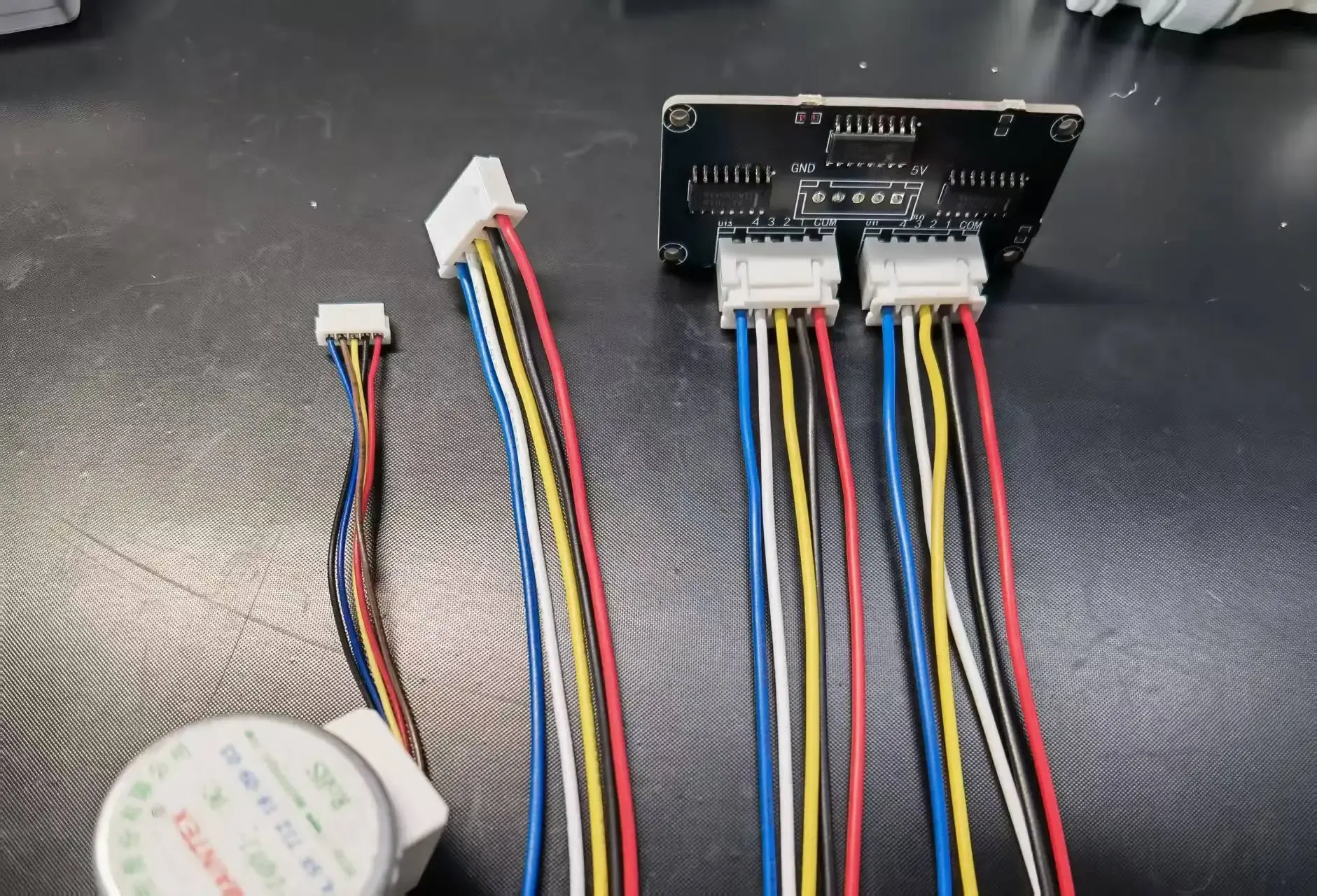
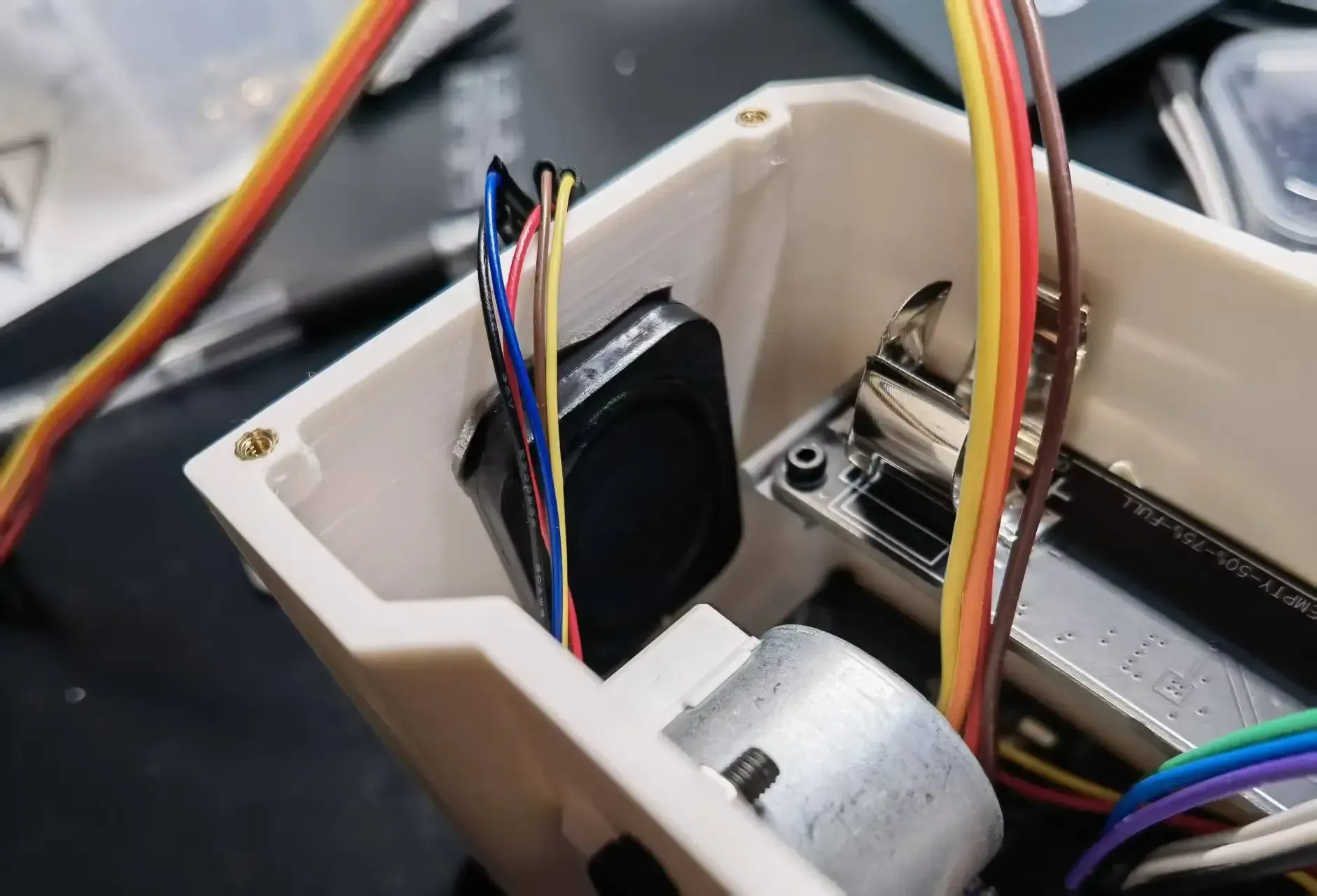
3.3 顶部电机接线(重要)
因不同 PCB 版本的 XH2.54 座子方向不一致,故这里不对线序进行明确,在接线时记住如下要领:
- 24 步进电机的红色线为 COM 端(5V 端),接线后的 2.54 端子相应的线应该连接在 5P 的 COM 端;
- 电机的其他 4 跟线依次连接到 2.54 端子的其他 4 根线,遵循由近到远的顺序。
- 接线前建议用镊子先将 XH2.54 接线的线序按照上面的方式进行调整,然后对应颜色接线即可。
下面放上我的焊接顺序。由于我的版本座子是向上开口焊接的,和现有版本不一致,大家遵循 24 电机红线-2.54 红线-座子 COM 引脚 即可。
若使用定制的ZH1.5转XH2.54转接线,接线时需注意以下关键事项:
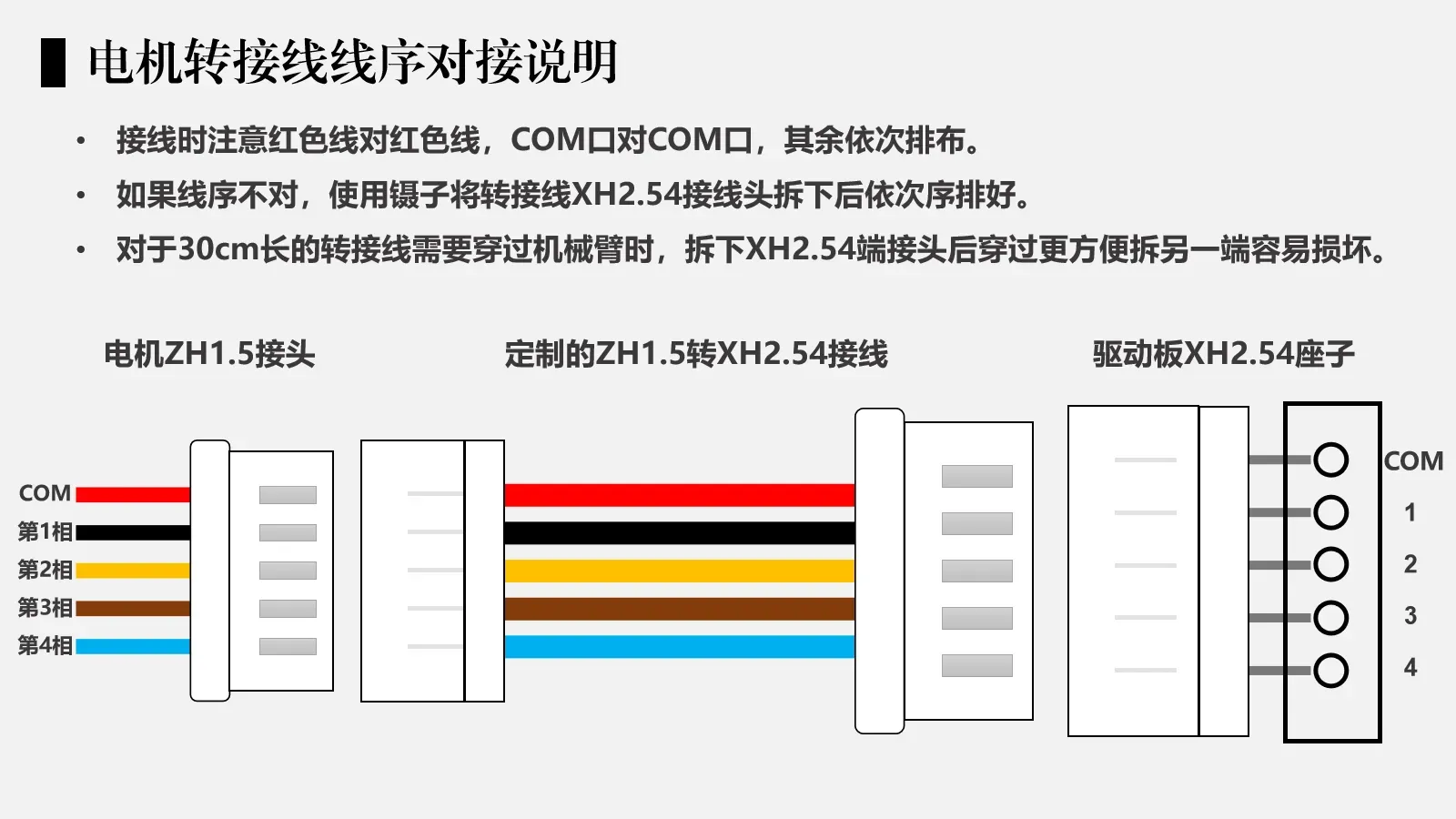
接线完成图如下:

4. 机械臂组装
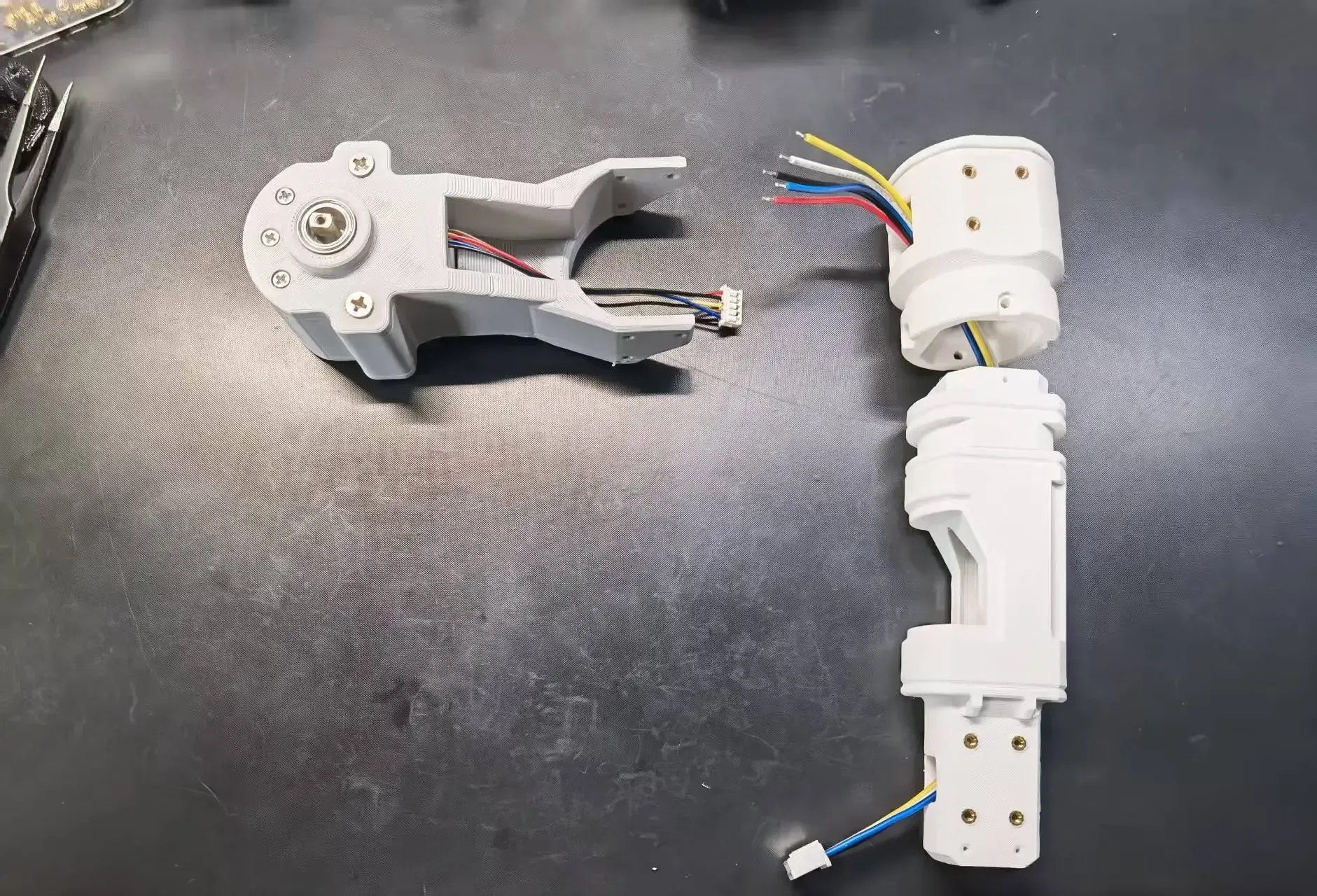
4.1 组装机械臂 1 和机械臂 2
使用M2*8内六角螺丝(非自攻)将机械臂 1 和机械臂 2 上部进行连接。
使用M2*8内六角螺丝(自攻)将机械臂 2 上部和下部进行连接。将机械臂 2 左侧的黑色盖板使用胶水粘贴。
4.2 组装机械臂1和顶支座
将M2六角螺母套入M2*8内六角螺丝(非自攻)中,然后用六角螺丝刀顺着顶制作将螺丝旋入机械臂 1 的步进电机轴内。
将支座装饰使用胶水粘贴。

为保证连接牢固,可以将六角螺母替换为类似厚度、半径更大的垫片,以增加轴与顶支座的受力面积,增加节点的牢固度。
4.3 组装顶支座和固定座
使用 4-6 颗M3*12平头十字螺丝(自攻)(实测使用 4 颗固定四个角基本上牢固了)将顶支座固定在固定座上,要注意固定好之后各个边没有突起,否则就是安装反了,就会受力不均。

4.4 组装机械臂3
使用M2*8内六角螺丝(非自攻)和M2六角螺母,将机械臂3 与主机电机的连接件和机械臂 3 主体连接。螺母卡在连接件的凹槽内,螺丝顺着主体螺入。

5. 主机组装
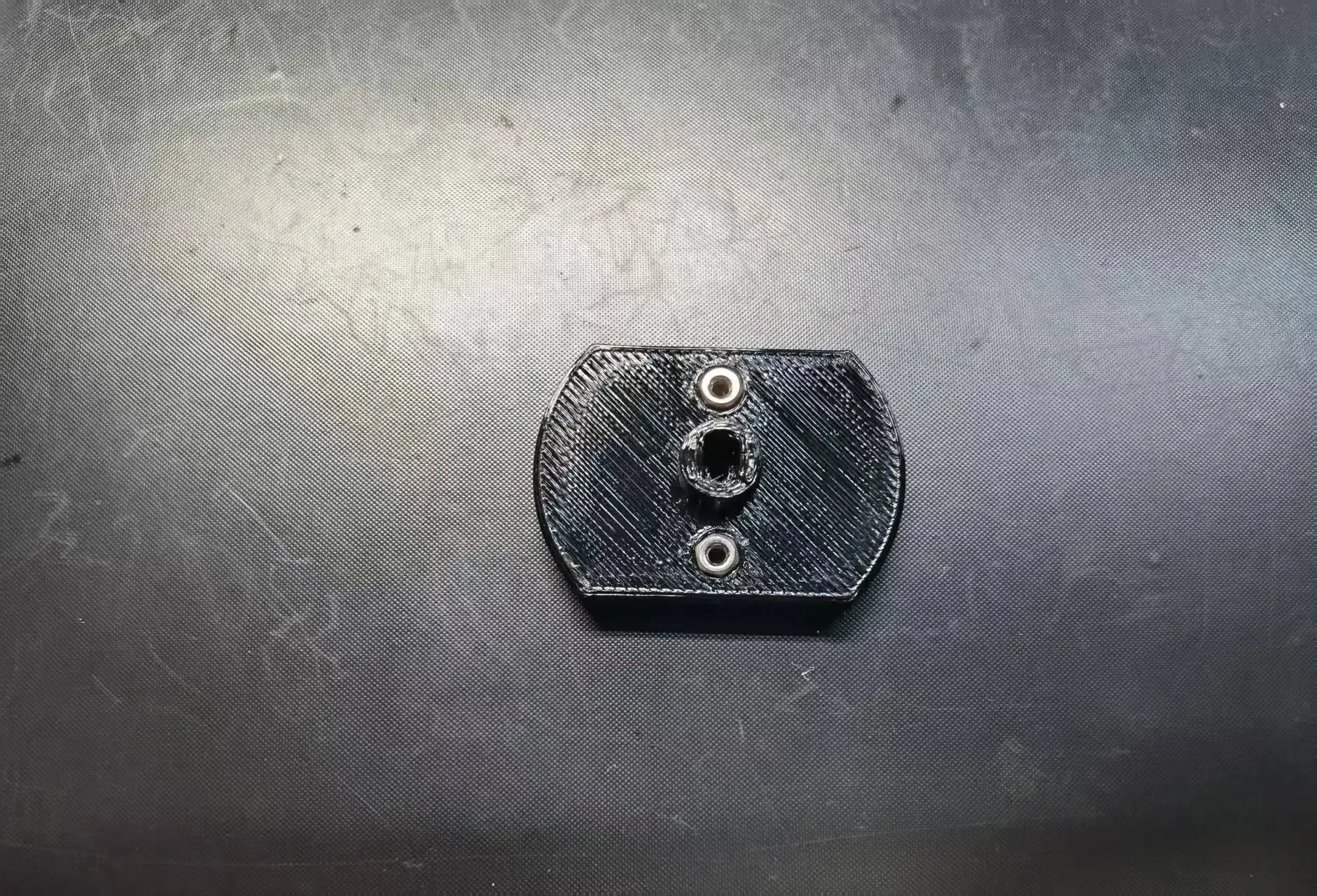
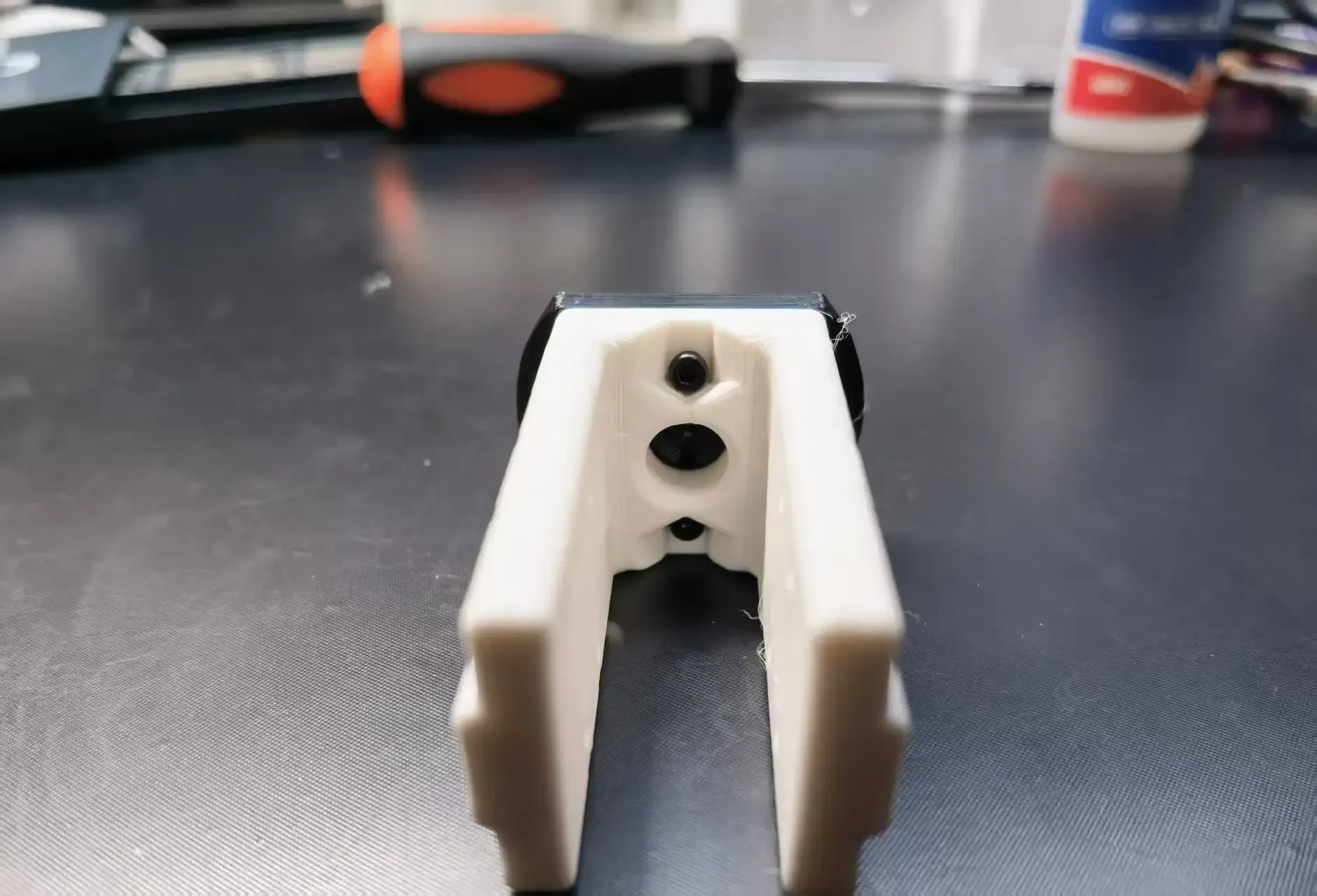
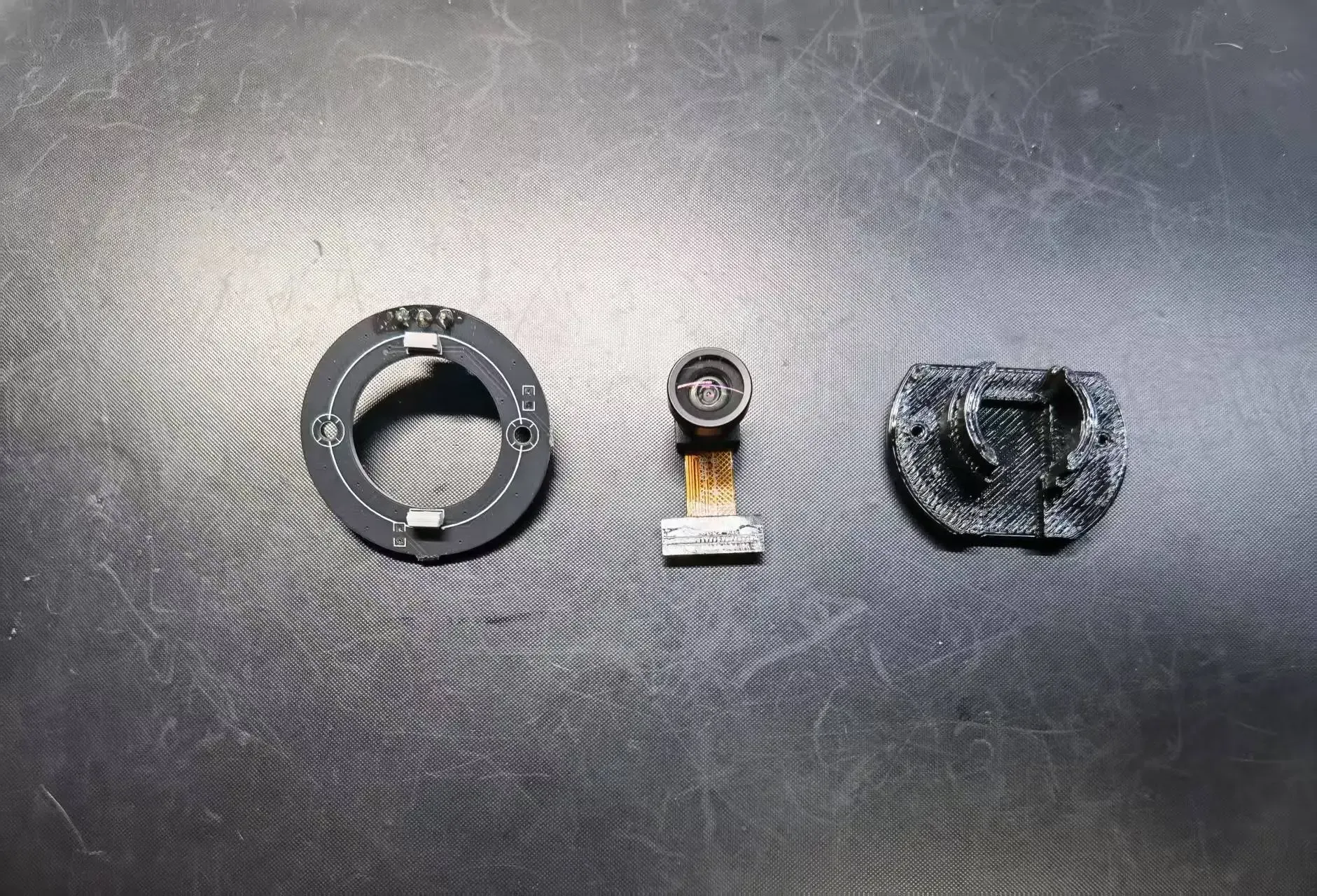
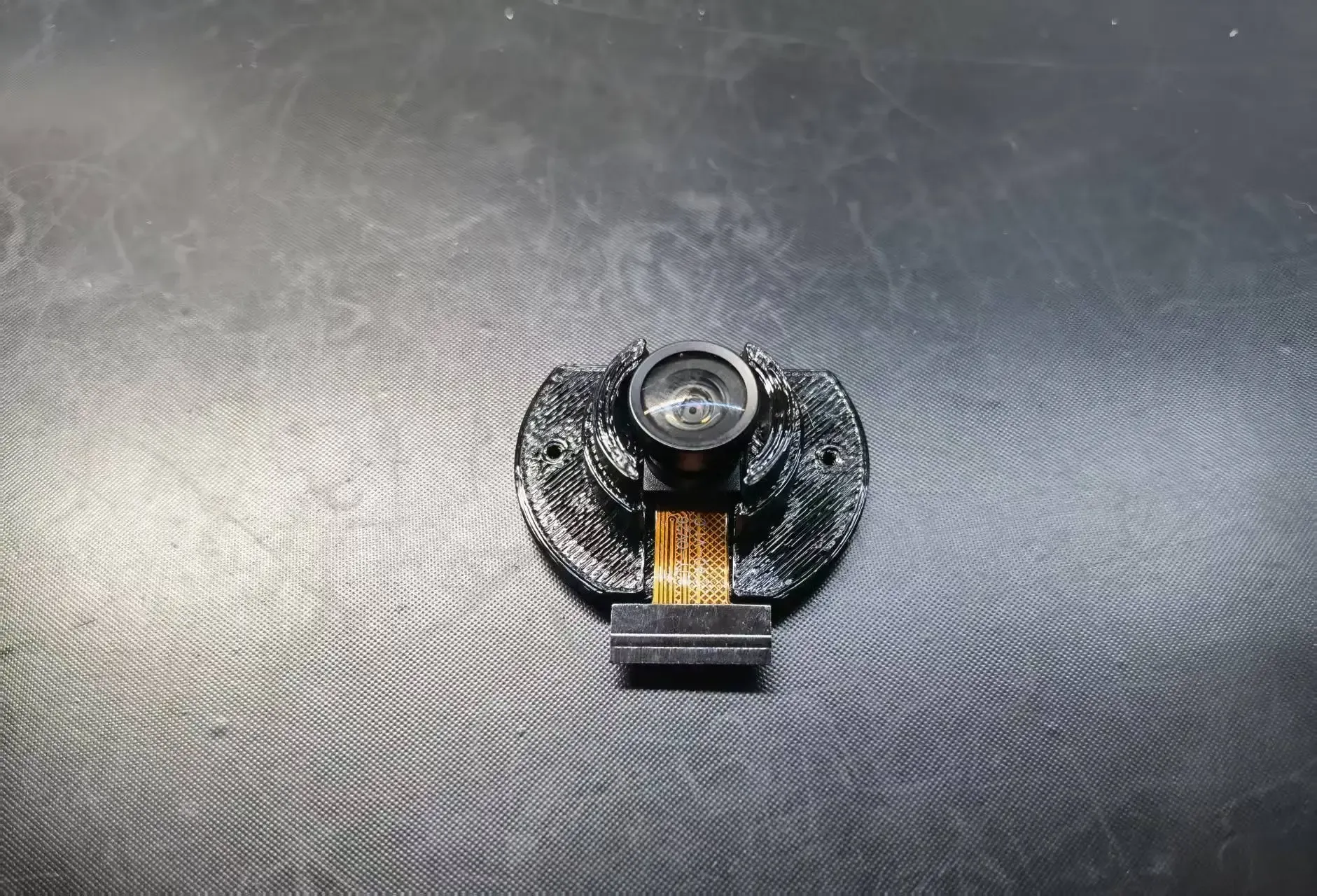
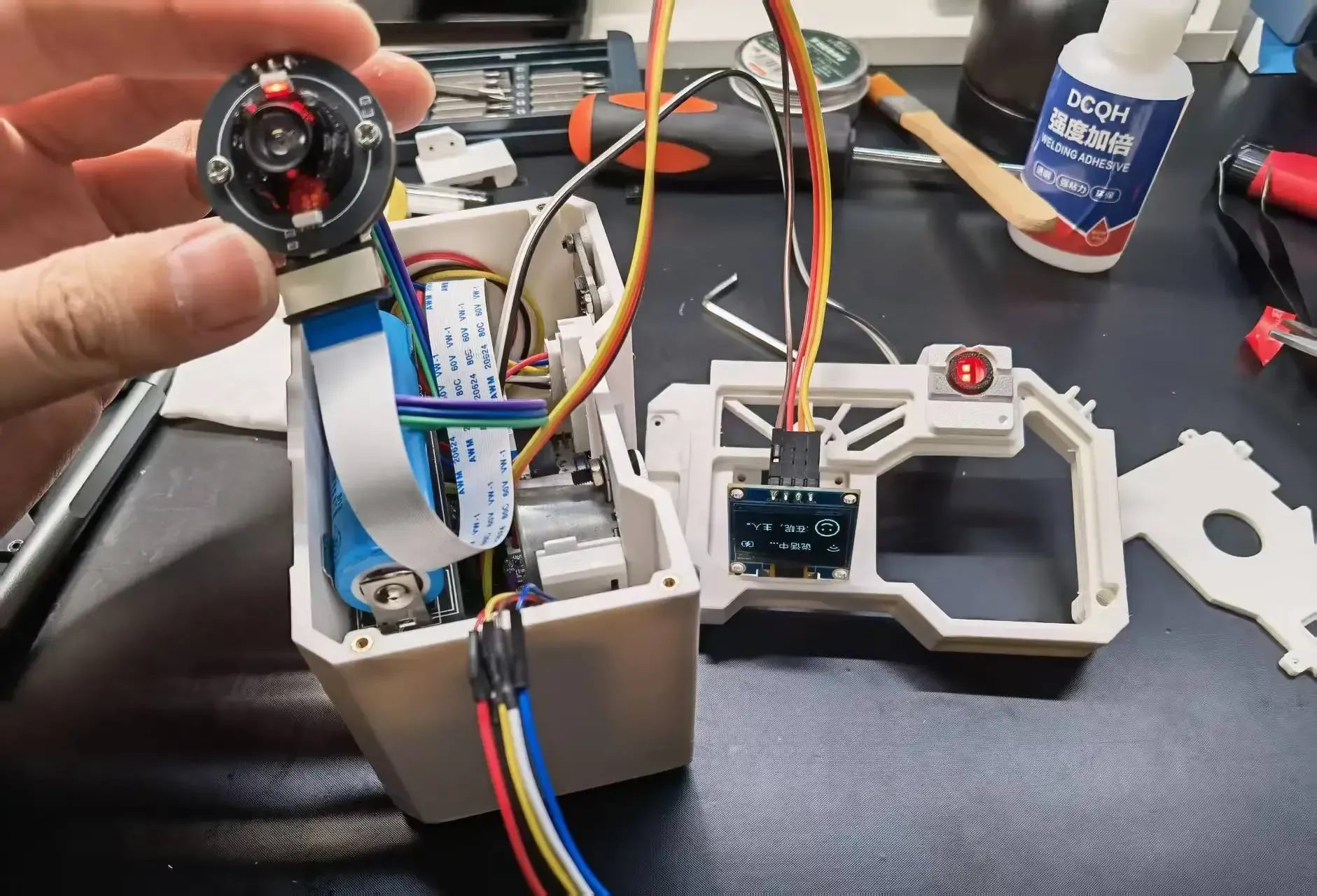
5.1 组装摄像头模组
将摄像头后面的背胶撕下来贴在摄像头固定件上面,然后将环形灯组靠在打印件上方,将排针靠上,使用M2*8平头十字螺丝(自攻)将 PCB 固定在固定件上面。

5.2 组装主机底壳和中间壳
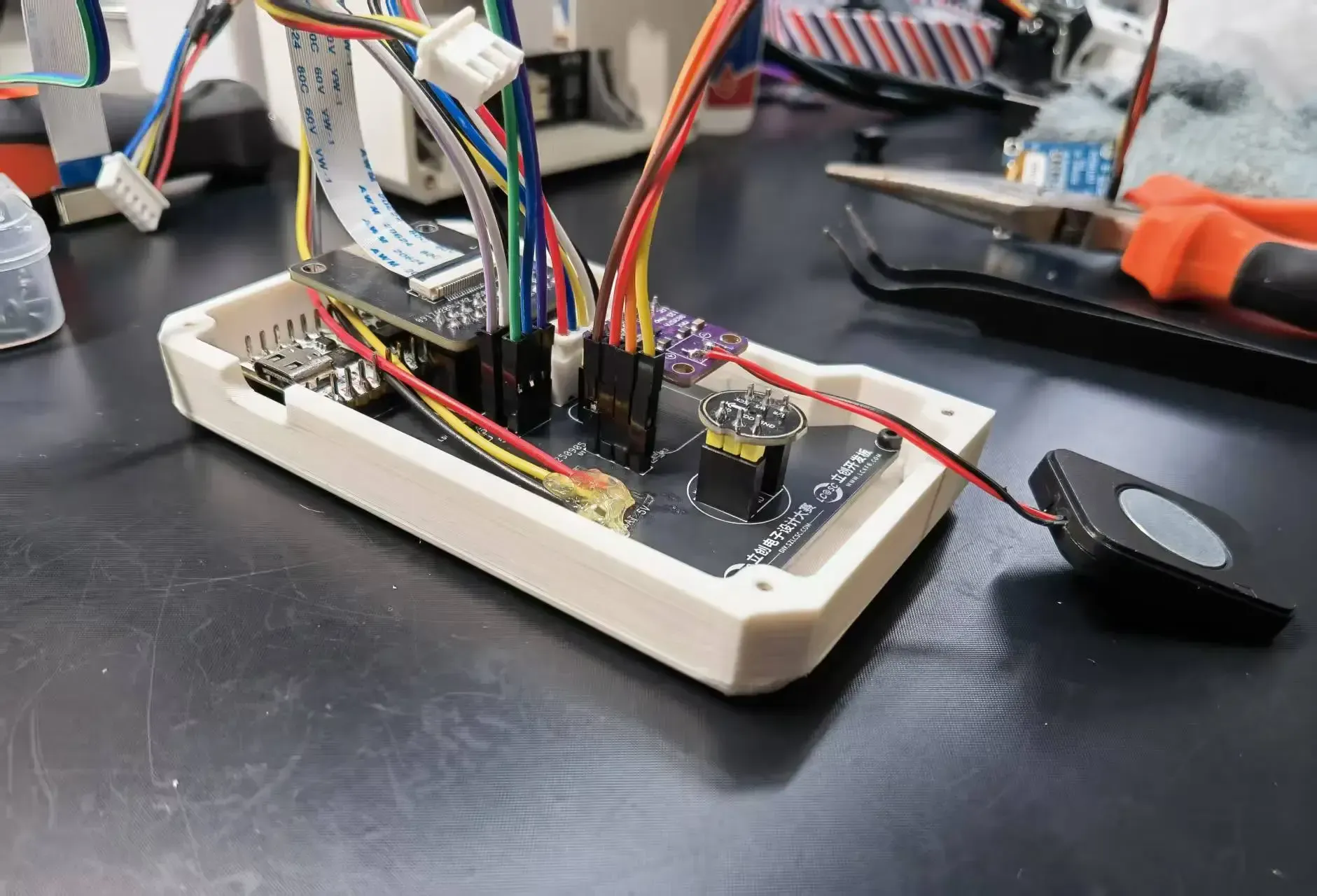
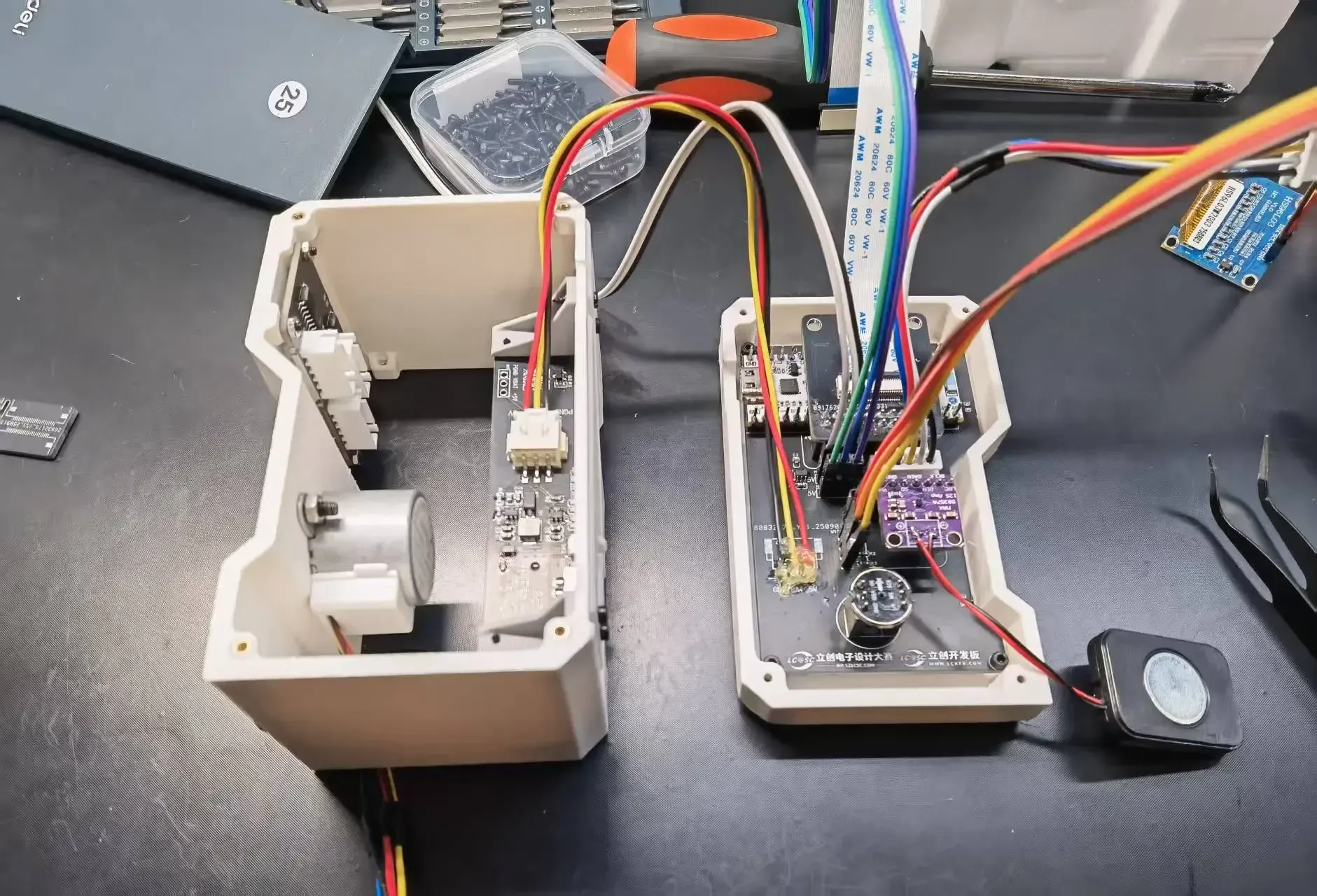
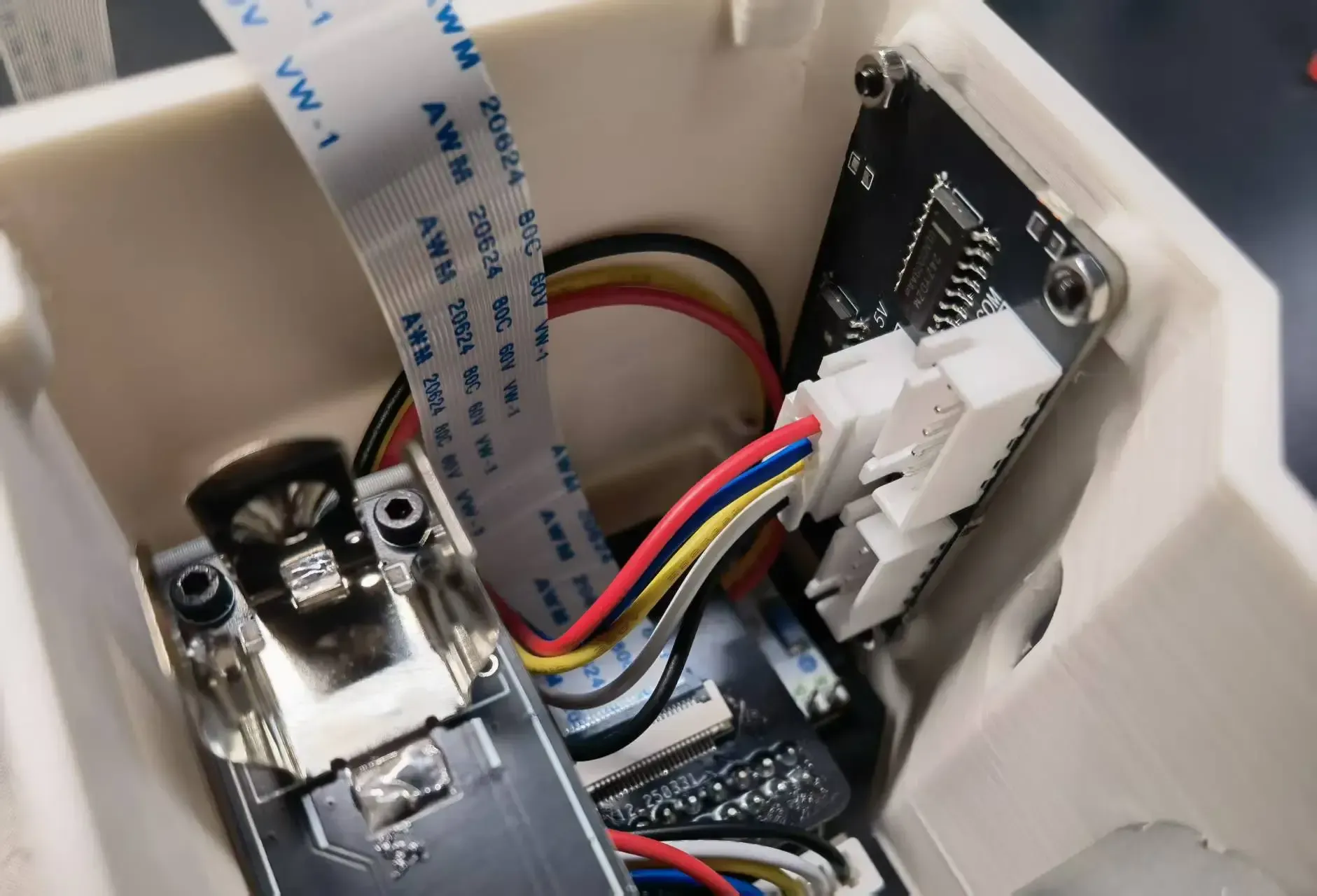
组装底壳前将所有设备插接在 MB 上面,测试系统是否正常,保证所有外设不短路、接线没错误。
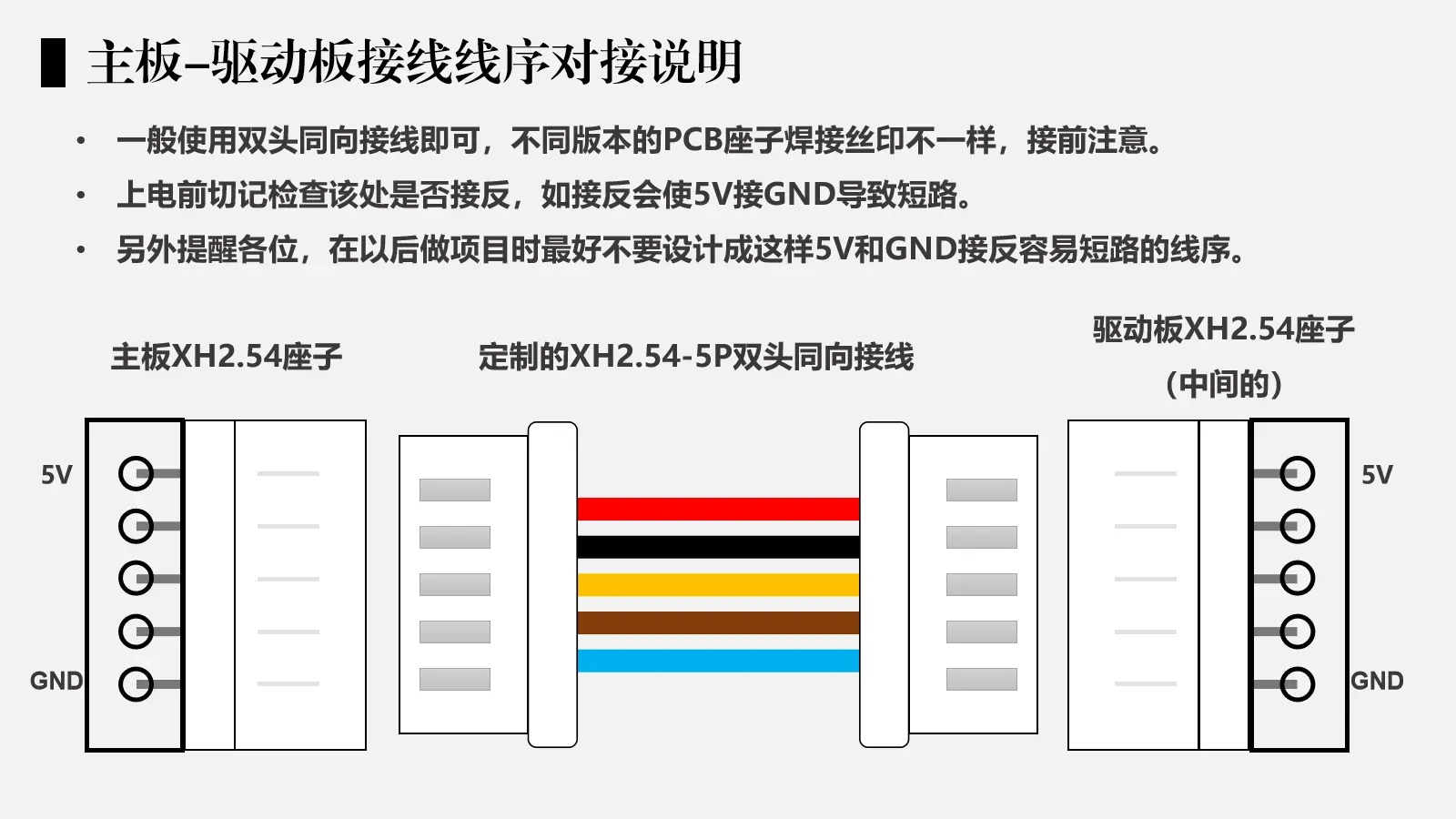
注意:主机和电机驱动板使用的双头同向线,保证 5V 接 5V,否则会短路烧板子。上电之前一定要测量 5V/3V3/BAT 对地是否短路!
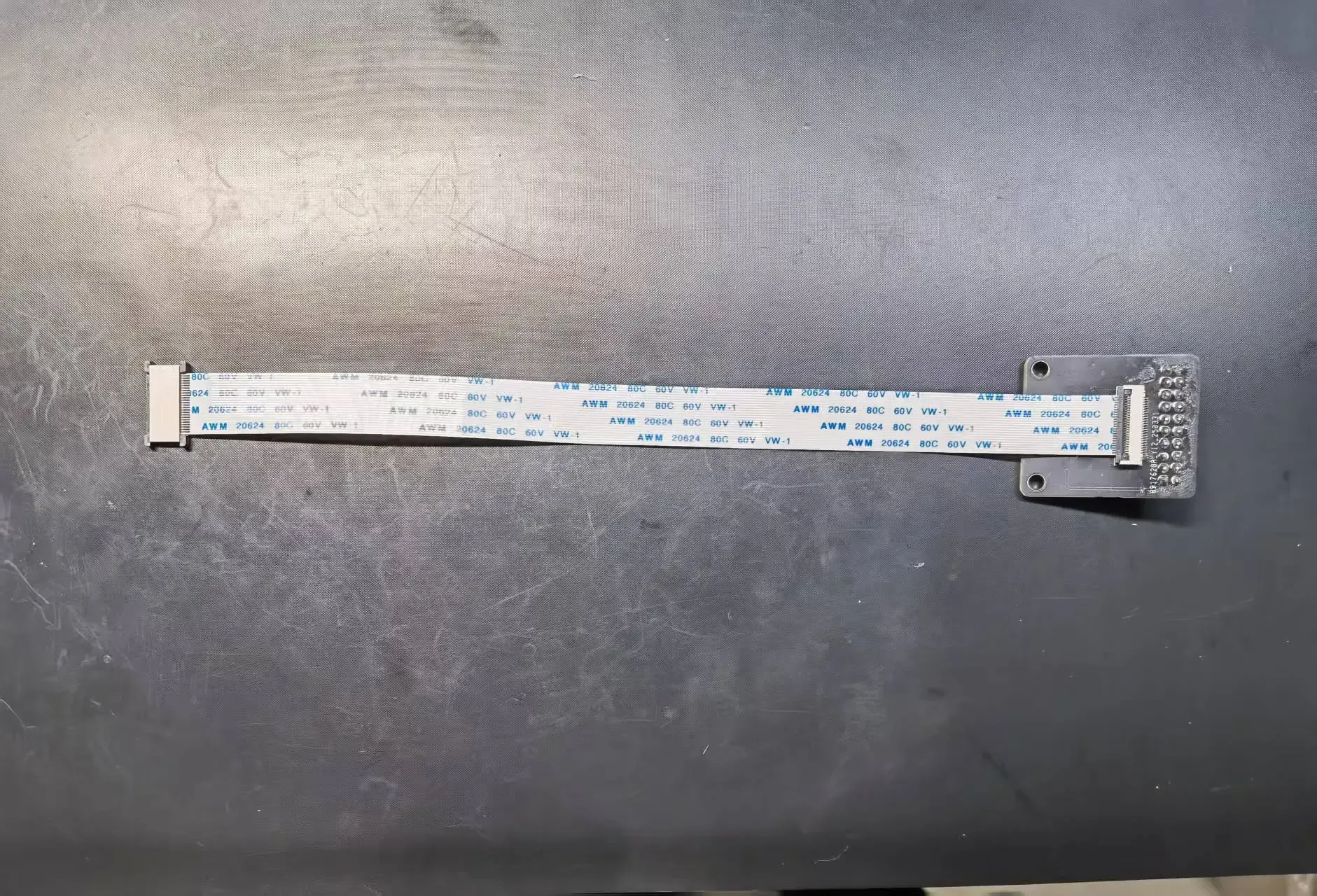
安装摄像头加长线,注意方向不能反,尤其是对接座子是下接的。
将所有线和板接在 MB 上面,理好线。
连接 MB 和供电模块,注意一定不能接反,一定不能短路。
将喇叭后面贴胶带。
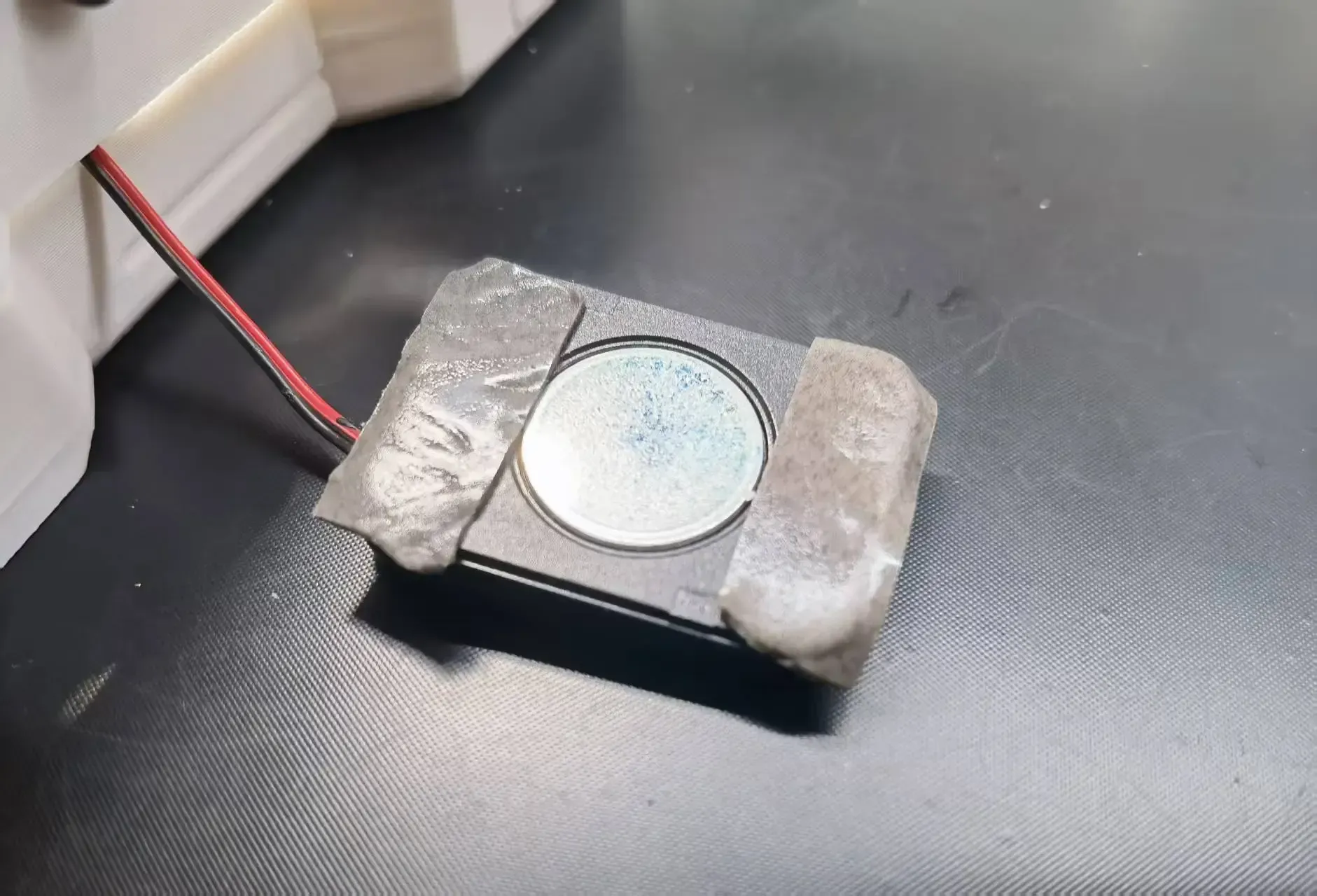
套上主机中间壳,将喇叭粘贴在中间壳上面。
将所有线理清后穿出来。
使用M2*8内六角螺丝(非自攻)将底壳和中间壳固定。
连接主板和驱动板的线。注意这里一定不能接反,接反必然导致短路!!!
安装摄像头、 OLED 和 LED 等外设,测试确定不断路后再安装 18650 电池打开电源,测试所有外设是否正常。
5.3 组装主机电机和机械臂3
和安装机械臂 1 以及顶部支座电机关节一样,使用M2*8内六角螺丝(非自攻)套入M2六角螺母中从机械臂 3 穿入并拧进 24 电机的轴中固定。

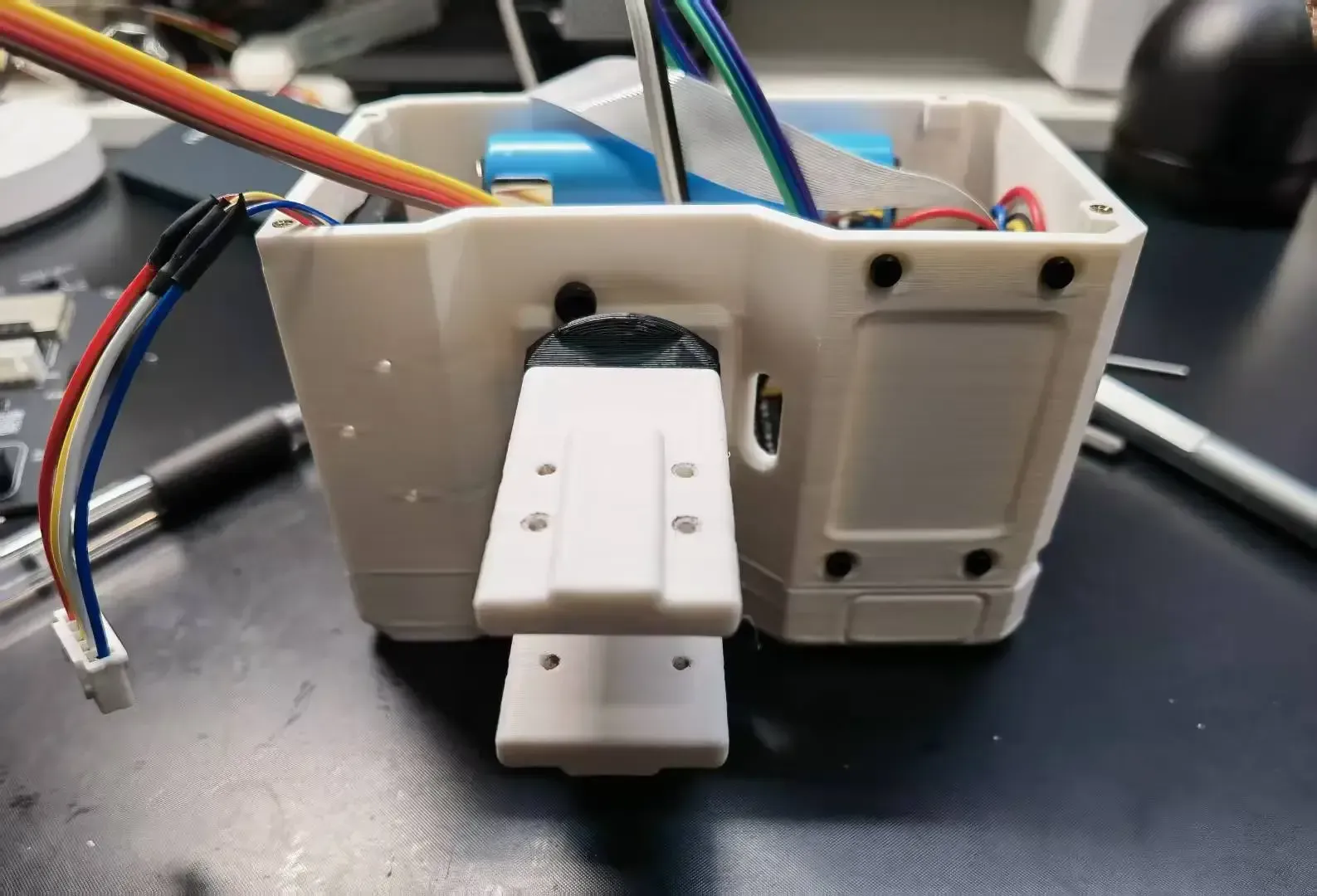
5.4 安装侧面装饰组件
将 550W 的 LOGO 粘贴在主机右侧

将主机右下部装饰按照下图的形式使用胶水粘贴后用M2*5内六角螺丝(自攻)固定在主机右侧。
5.5 组装机械臂2和机械臂3
使用M2*8内六角螺丝(非自攻)将机械臂 2 和机械臂 3 进行连接,同时将电机的插头穿入主机右侧的孔内。
5.6 电机接线
将上部电机和下部电机改装后的 XH2.54 接线头接入座子上,这里要注意接上驱动板下部标有 COM 的座子处,其中上部电机接靠后侧的座子,下部电机接靠前侧的座子。
安装 18650 电池,注意正负极、注意电池座是否连接电池牢固。
5.7 安装前盖灯组
将前盖 1313 灯组(方形)卡入灯组装饰打印件内。若卡不结实则使用胶水固定。

将前盖灯组装饰组件用胶水粘贴在主机前框架上。
5.8 组装主机中间壳和前盖框架
将左侧灯组和靠上部的 3pin 排针使用杜邦线连接,注意不要接反了。然后,将 OLED 的 4pin 排线穿过 OLED 洞、将摄像头组件使用杜邦线接 MB 靠下部的排针,然后穿过上部框内。
使用M28内六角螺丝(非自攻)(按装在右下角)和三颗M25内六角螺丝(非自攻)(安装在左上、右上、左下)将主机前框架固定在中间壳。
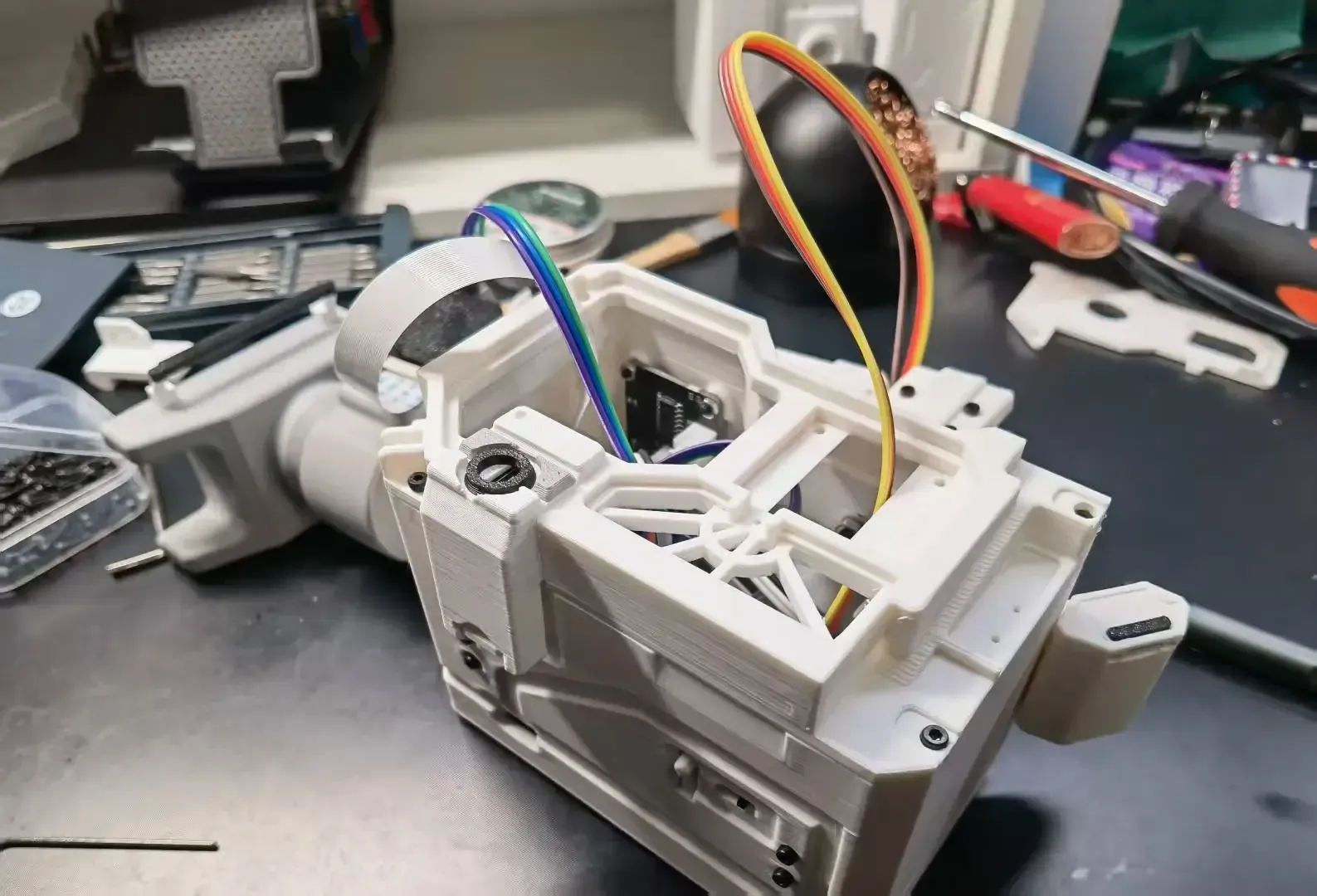
注意,这里请务必进行最后一次短路测试。
5.9 安装主机前盖板
将 OLED 显示屏连接并放入槽内,这里不需要使用螺丝连接。将摄像头组件的打印件直接扣在主机前盖板上,调整方向使两个灯在顶部和底部。
使用M2*5内六角螺丝(自攻)将主机前盖板固定在前框架上。开机检测。

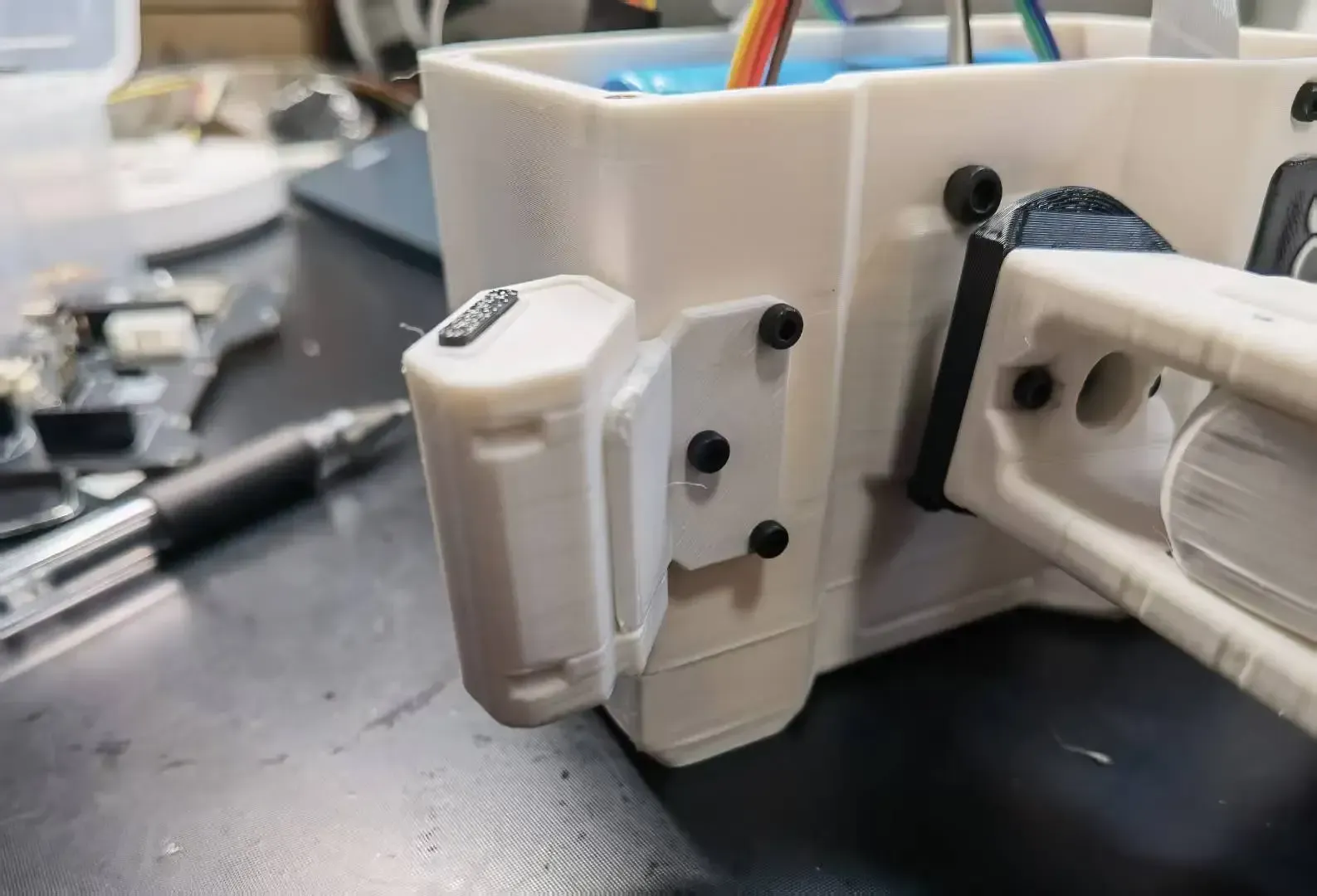
5.10 粘贴主机正面装饰
如下图所示,使用胶水粘贴左上、正面装饰。
这里注意,下图右侧盖板空缺部位粘贴红色方块。

5.11 组装主机正面下部装饰挂件
使用M2*5内六角螺丝(自攻)将机正面下部装饰挂件固定在主机下部。

6. 悬挂
将固定支座卡入 18mm 后的木板上,使用大螺母旋入固定支座将其固定。

至此,组装完成。
安装完成图





评论