


【MPS机器人挑战赛作品】适用关节电机的小型化FOC
简介
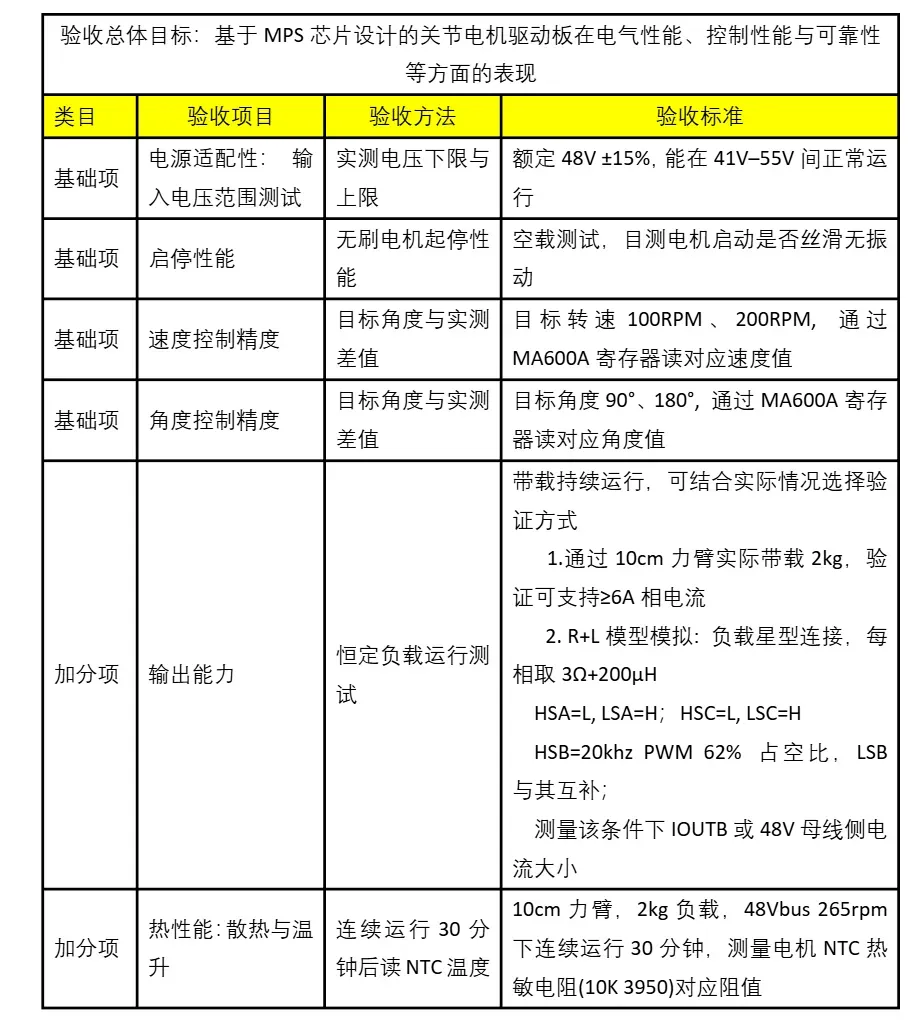
一款基于MPS芯片的关节电机驱动板开源项目。参加2025 MPS“智驱未来”机器人芯动力设计挑战赛。完整通过了48V宽压输入、丝滑启停、速度与角度控制精度等基础测试;已验证带载能力。
简介:一款基于MPS芯片的关节电机驱动板开源项目。参加2025 MPS“智驱未来”机器人芯动力设计挑战赛。完整通过了48V宽压输入、丝滑启停、速度与角度控制精度等基础测试;已验证带载能力。开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
当前项目为比赛评审项目,后期在该基础上进一步改进,可以参考:
- 包含设计文件原理图以及PCB图的完整工程文件,请参考嘉立创开源广场:STM32G431-MPS-COMPETITION-FOC - 立创开源硬件平台
- 包含代码的完整资料可以参考Github:Riven-Huang/MPS_FOC_STM32G431: 使用STM32G431重新设计了FOC
参加2025 MPS“智驱未来”机器人芯动力设计挑战赛,实现速度环,位置环,带载测试等功能。使用MP6539BGV(不太用的上MP6539GV的功能)作为驱动,一个IC集成三路PWM驱动,可以通过外部信号控制硬件是否发波。方便设计同时,满足高度集成化与可靠性要求。目前使用ACS725车规级霍尔传感器作为电流传感器(于V1.1于V2.1版本更换成运放形式)。使用MPS的电源管理芯片实现48V+15%的宽电压工作范围。
本系统MCU使用F280023C,初版本由于IO口资源紧张以及方便layout原因,没有预留串口和硬件SPI(用于加快MA600A的角度读取速度)等功能。F280023C本身具有CLB功能加速计算,且TI的DSP-C2000ware系列,对于电源特殊适配。可以方便的配置epwm触发ADC的SOC,保证同步。F280023C本身对于cos和sin等函数具有加速,计算这些三角函数时速度非常快。本系统设计20khz的ADC采样频率 = 控制频率 = epwm开关频率。ADC的SOC 处于epwm的低电平中心启动,保证干扰最小。
PS:要把30mins视频压缩到50MB真不容易
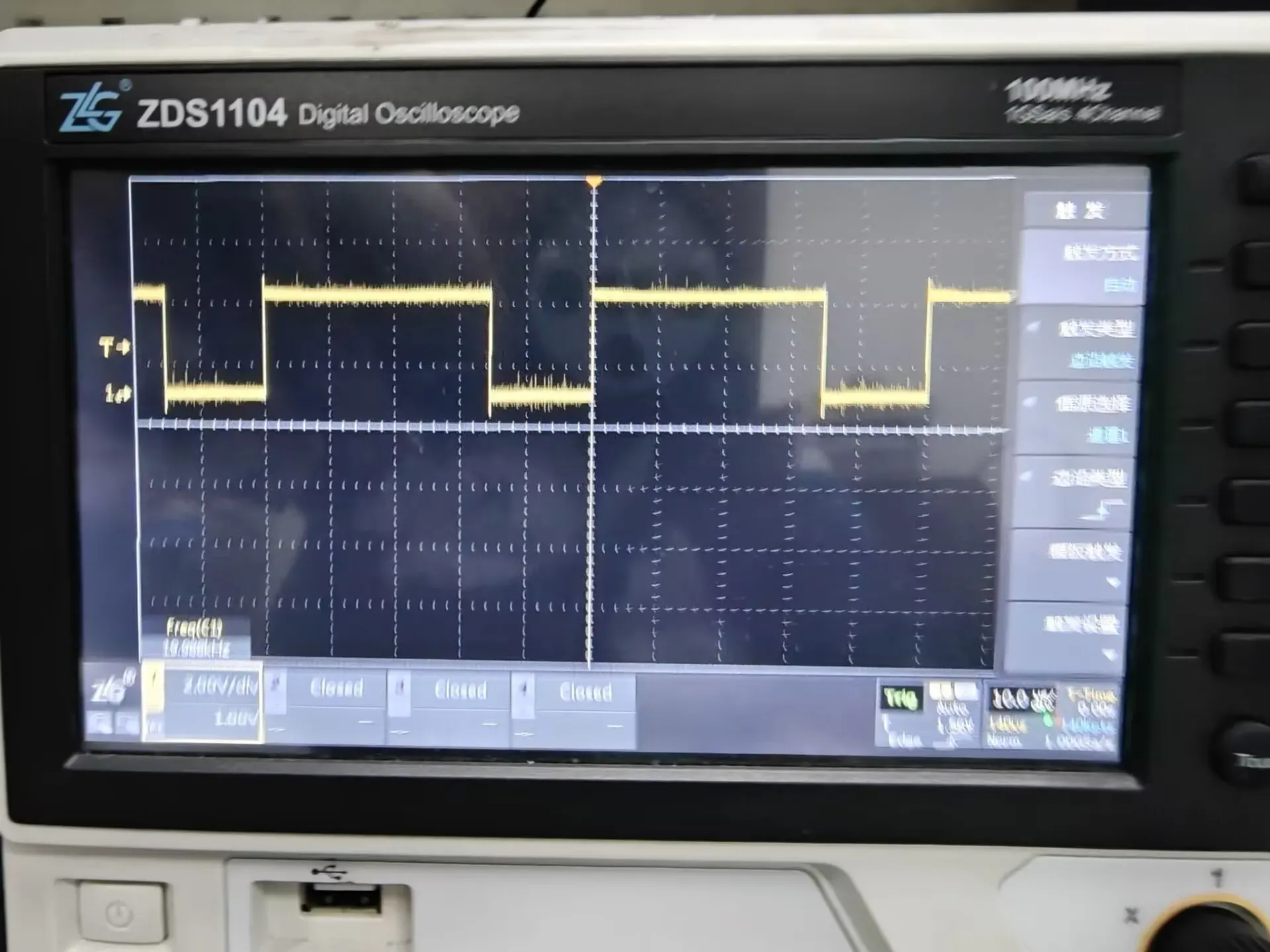
实际对一个周期主程序运行时间测量如下图所示,一个周期为系统运行周期50us,高电平为主程序运行时间。在当前主系统运行周期50us内,由于使用软件SPI非常耗费资源,于是我将原本的软件SPI代码,改成了寄存器寻址操作,勉强将其限制在了30us左右,保证了系统能够正常运行,而这终究不是长久之计,下一版本应当改正!。
系统介绍基本如上述所示,后续会在更新一下具体细节。测试视频放在附件中,分别测试了如下测试项!
1.第一段30mins带载测试
由于要把30mins视频压缩到50MB内 才能上传,视频画质糊成一坨了,我在这里截取几张关键点的图片放在这里方便查看一点,应要求把最后一个30mins的测试视频上传到B站了,视频链接如下:30mins load test_哔哩哔哩_bilibili
----- 新做了一版更笔者认为更好的测试!放在了这段测试的下面,两端30mins带载测试都可以作为参考 -----
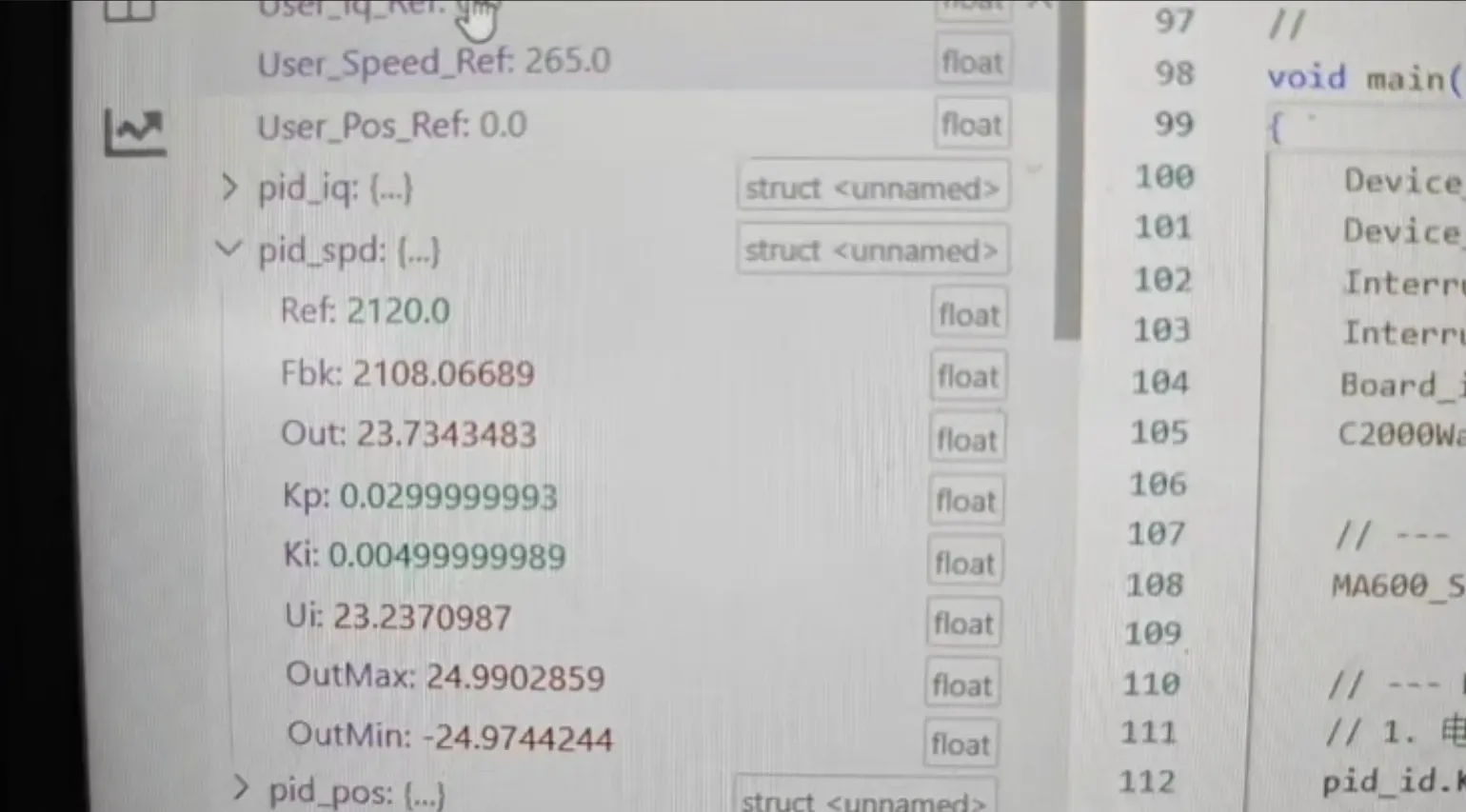
1.265rpm速度下:
2.刚开始运行时
3.运行30mins后

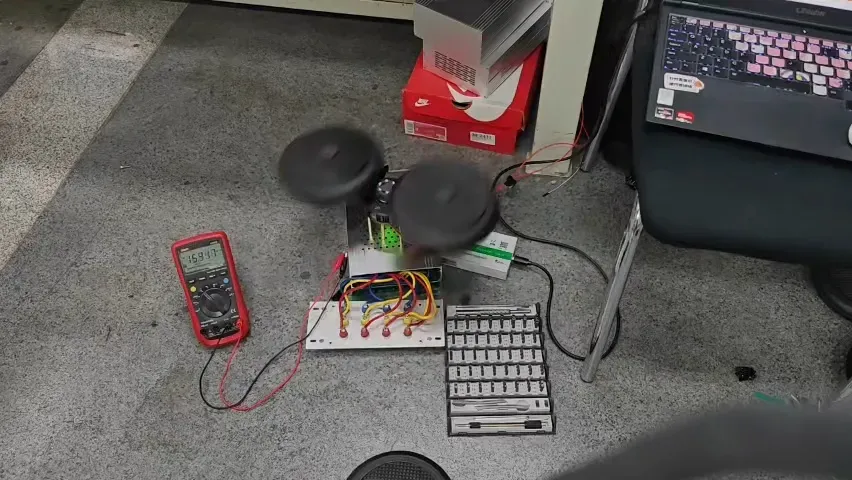
1.第二段30mins带载测试,流体测试
我选择了一种更科学的方法,去获得持续的稳定负载-借用风阻或流体,因为水的密度是空气的 800 倍,在此处更容易实现题目要求的输出水平。我选择用涡轮扇叶转动水体的方式进行测量,重新发布了一个视频。30mins 流体负载测试 更科学_哔哩哔哩_bilibili
下面进行等效关系换算,说明为什么这样测试是合理的:
原测试条件:
目标扭矩:1.96 Nm 计算过程:2kg×9.8×0.1m
目标转速:265 RPM
目标机械功率(输出):P=T×n/9.55=1.96×265/9.55≈54.4W
还得算上一些机械损失和铜损,也就是说我们的功率要大于等于这个条件,才能达到在265rpm下持续输出1.96Nm力矩的等效效果。
那么用流体测试来等效有什么好处呢?:
1.首先,无论负载形式是提重物、摩擦皮带还是搅拌水流,只要电机在 265 RPM 时输出了 54.4 瓦 的机械功率,对于电机内部的线圈发热和磁钢退磁风险来说,物理效果是完全等效的。”
2.不选择别的通用方法,例如皮带摩擦法,提重物,点击对拖等是因为,首先没有多余相同的电机进行对拖;重力负载(提重物)很难连续做30分钟,需要反复升降;摩擦负载(皮带)会因为发热导致摩擦系数剧烈变化,阻力忽大忽小,数据不准。
3.而流体负载(水)是目前最稳定的负载。只要水位不变、扇叶形状不变,阻力就绝对恒定。这能保证30分钟内的热平衡测试更严谨、更具重复性。工业上叫做水力测功机。大型柴油机、船用发动机测试都是用搅水来测功率的。
4.调节水深,调节扇叶浸入水的深度,可以无级调节负载,在我这个水桶里,只需要增加水的深浅,就可以改变负载输出水平。
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论