


MPS 关节电机全栈解决方案(基于STM32G431 FOC)
简介
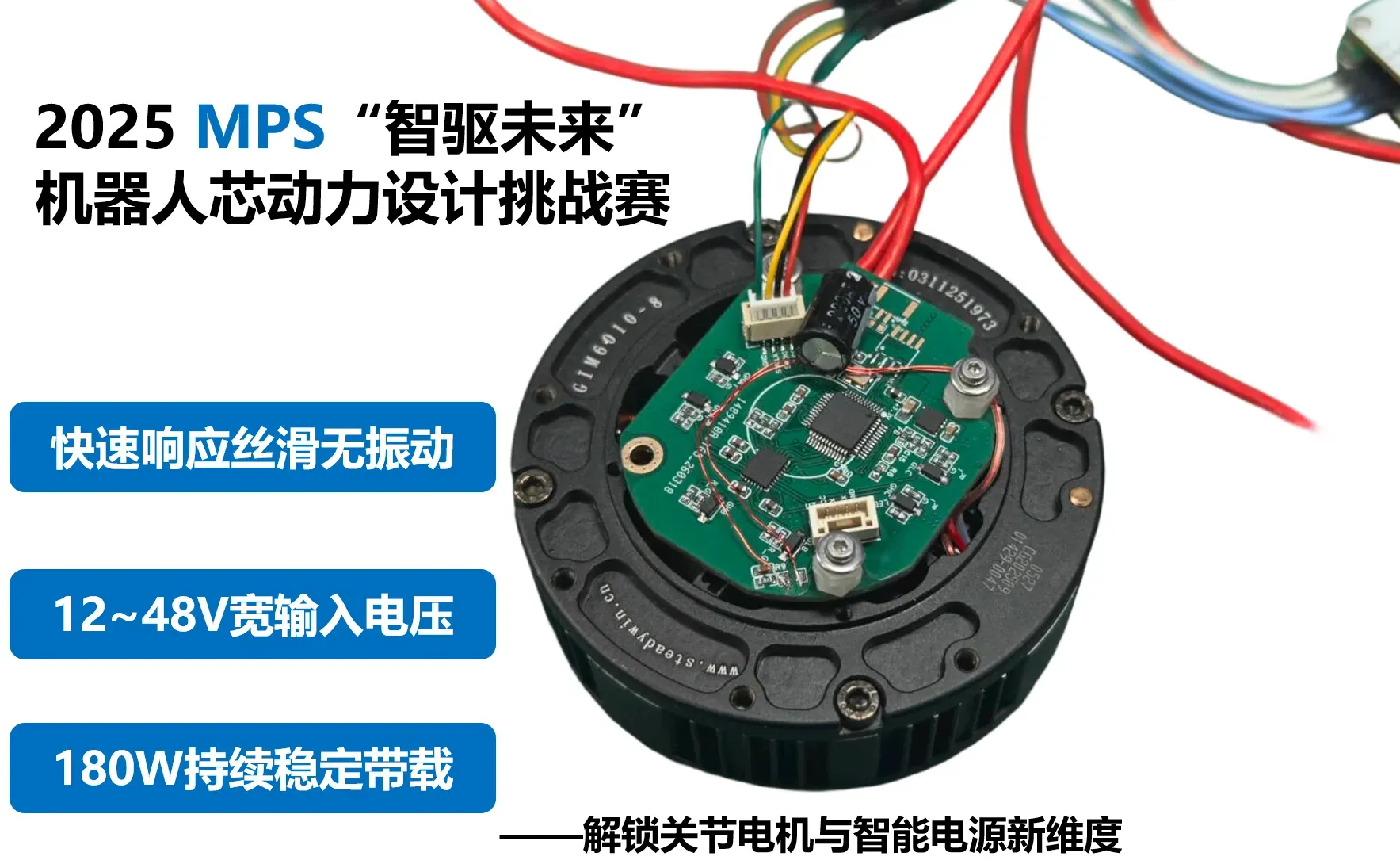
使用MPS电源/电机驱动/位置传感器等全套芯片,基于STM32G431CBT6 一款关节电机驱动板开源项目。荣获2025 MPS“智驱未来”机器人芯动力设计挑战赛一等奖。持续180W带载,三环闭环控制
简介:使用MPS电源/电机驱动/位置传感器等全套芯片,基于STM32G431CBT6 一款关节电机驱动板开源项目。荣获2025 MPS“智驱未来”机器人芯动力设计挑战赛一等奖。持续180W带载,三环闭环控制开源协议
:GPL 3.0
描述
MPS-FOC关节电机
使用MPS电源/电机驱动/位置传感器等全套芯片,基于STM32G431CBT6 一款关节电机驱动板开源项目。荣获2025 MPS“智驱未来”机器人芯动力设计挑战赛一等奖。完整通过了48V宽压输入、持续180W带载,丝滑启停、三环闭环控制。
开源无刷电机 FOC 控制工程 | Open-Source PMSM / BLDC FOC Project

目录
- 1. 项目简介
- 2. MPS大学计划
- 3. 硬件说明
- 4. 验收测试与视频
- 5. 软件架构
- 6. 接口说明
- 7. 控制实现说明
- 8. 快速开始
- 9. 新电机适配流程
- 10. 项目目录
- 11. 已知限制与后续计划
- 12. 相关文件
- 13. 许可证说明
1. 项目简介
1.1 项目定位
本项目基于 STM32G431CBT6,面向 PMSM / BLDC 的三相 FOC 控制。仓库目标是提供一套可直接落到板级 bring-up 的开源实现。
适用场景:
- 板子已经打样完成,需要尽快确认“代码怎么烧录、上电后怎么先转起来”。
- 正在做自研 FOC 控制板,需要参考一套完整的“采样 -> 快环 -> 慢环 -> telemetry -> 调参”工程结构。
1.2 当前工程状态
当前仓库已经具备完整主链路,不是只有框架:
- 当前工程实现了 MPS-FOC 比赛中的全部测试项目;当前开源内容对应 LCEDA 开源广场中的 V1.2 版本,及其子版本。
- 包含设计文件原理图以及PCB图的完整工程文件,请参考嘉立创开源广场:STM32G431-MPS-COMPETITION-FOC - 立创开源硬件平台
- 包含代码的完整资料可以参考Github:Riven-Huang/MPS_FOC_STM32G431: 使用STM32G431重新设计了FOC,如果本项目有帮到你,希望可以得到你的Star.
1.3 适配电机型号
本项目当前默认机械与电机参数按 GIM6010-48 级别关节电机配置。以下关键值摘自 docs/GIM6010-48电机必要参数表.xlsx。
| 必要参数 | 参考值 | 单位 | 本项目中的用途 / 需要同步的位置 |
|---|---|---|---|
| 额定电压 | 48 | V | 对应当前 48V 母线平台与测试条件 |
| 电压范围 | 12~48 | V | 上电和带载测试需保证工作在该范围内 |
| 额定功率 | 158.4 | W | 用于估算连续输出能力与热设计边界 |
| 额定扭矩 | 26.2 | N.m | 用于评估减速后输出能力与负载目标 |
| 额定电流 | 3.3 | A | 长时连续电流参考,不等同于当前调试用 iq_limit 上限 |
| 相间电阻 | 0.443 | Ω | 电流环对象参数,换电机后应重新核对 current_kp/current_ki |
| 相间电感 | 0.222 | mH | 影响电流环带宽和 PI 设计,需与 program_init() 同步 |
| 转速常数 | 1.98 | rpm/V | 用于核对空载速度与反电势等级 |
| 扭矩常数 | 4.7 | N.m/A | 用于估算输出扭矩与限流策略 |
| 极对数 | 14 | 对 | 对应 program/App/motor_params.h 中的 MOTOR_POLE_PAIRS |
| 减速比 | 8 | 比 | 当前关节总成按 8:1 配置,对应 MOTOR_GEAR_RATIO |
适配其他电机前,至少需要同步检查 program/App/motor_params.h 中的 MOTOR_POLE_PAIRS、MOTOR_GEAR_RATIO、MOTOR_ENCODER_ON_OUTPUT_SHAFT、MOTOR_ENCODER_DIRECTION_SIGN;如果 R/L/Kt 与上表不同,还需要重新核对 program/App/program.c 里的电流环 PI 和 iq_limit。
2. MPS大学计划
2.1 申请说明
本项目基于MPS的比赛2025 MPS“智驱未来”机器人芯动力设计挑战赛,详细见:2025 MPS“智驱未来”机器人芯动力设计挑战赛
工程复刻福利
想快速复刻本关节电机工程?特联合MPS为开发者提供免费样品申领福利,工程同款芯片直接送,帮你零成本启动项目开发!可通过下方二维码或点击链接直接申领https://app-u.jingsocial.com/surl/JNH9Kul
(附下方申请流程图)
2.2 二维码入口

3. 硬件说明
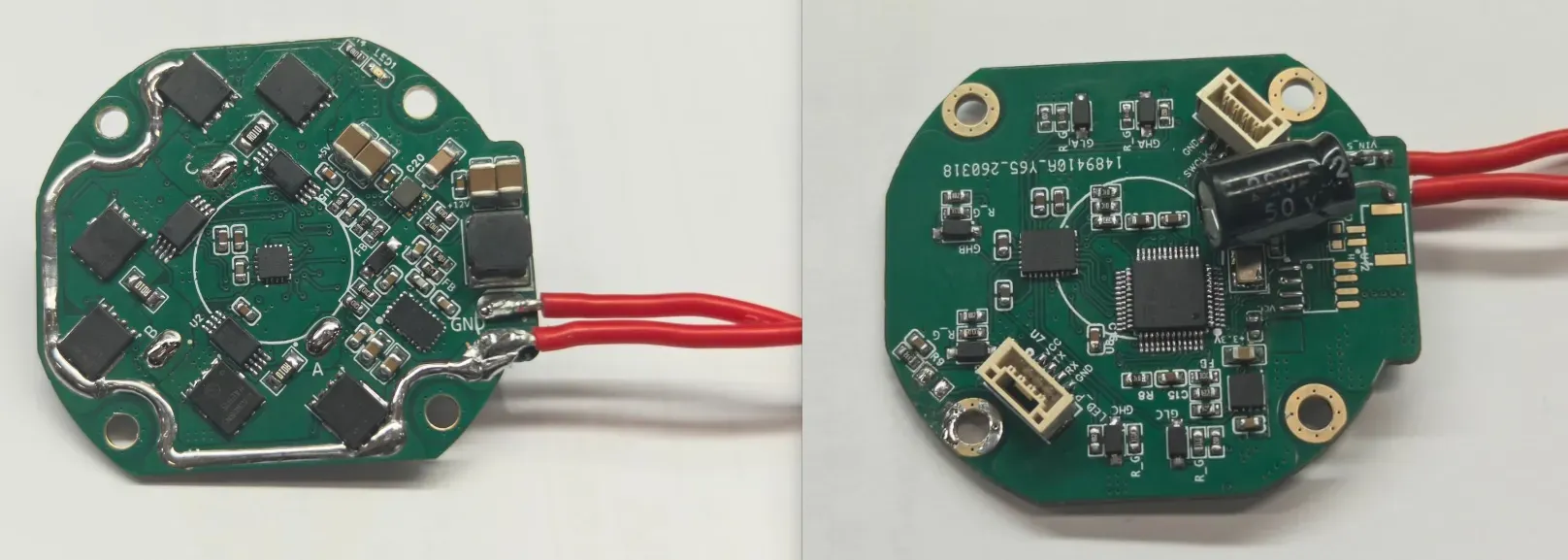
3.1 硬件实物图
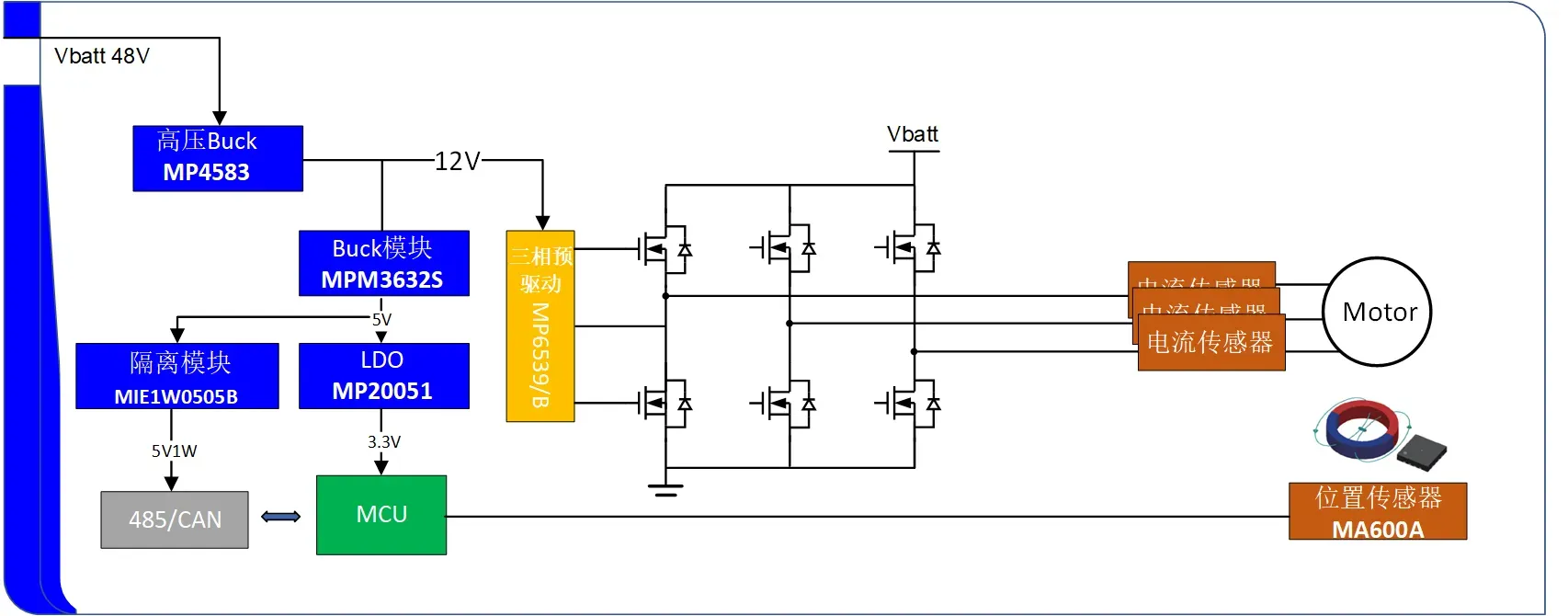
3.2 硬件核心配置
本节仅保留核心器件与板级功能分工;具体引脚、方向和信号关系统一放到第 6 章“接口说明”。
| 模块 | 当前实现 | 说明 |
|---|---|---|
| 主控 MCU | STM32G431CBT6 | 170 MHz,带高级定时器,适合 FOC 快环 |
| 位置反馈 | MA600A | 16-bit 绝对值编码器,用于机械角度反馈 |
| 功率级预驱 | MP6539B | 三相半桥预驱,负责功率级栅极驱动 |
| 主母线电源 | MP4583 | 宽输入 DCDC,支持当前 48V 母线平台 |
| 栅极驱动隔离供电 | MIE1W0505 | 为预驱动提供隔离电源 |
3.3V POL | MPM3632S | 为 MCU 和编码器供电 |
| 备份供电 | MP20051 | 为待机与辅助部分供电 |
3.3 编码器与机构默认配置
电机额定参数、极对数与减速比以 1.3 节为准;本节只保留与安装和方向相关、装配后最常需要核对的默认配置。当前参数位于 program/App/motor_params.h:
| 参数 | 当前值 | 说明 |
|---|---|---|
| 编码器方向 | -1 | MOTOR_ENCODER_DIRECTION_SIGN |
| 编码器安装位置 | 转子侧 | MOTOR_ENCODER_ON_OUTPUT_SHAFT = 0 |
4. 验收测试与视频
本节将仓库内已经公开的验收项、测试视频与现有数据集中整理,便于开源发布时快速核对。当前能够直接在仓库中举证的量化结果包括:
48V ±15%宽输入电压- 速度环、位置环基础控制效果
180W对拖带载与温升热测结果
4.1 验收测试总表
测试视频可以再github仓库查看,也可以在B站直接查看:STM32-MPS-FOC电机全流程测试_哔哩哔哩_bilibili
| # | 验收项目 | 参考验收标准 | 测试数据 | 数据来源 |
|---|---|---|---|---|
| 1 | 电源输入范围测试 | 48V ±15% 宽输入电压 | 40V-56V宽输入运行 | 视频:Test1 Power Supply Input Voltage Range Test.mp4 |
| 2 | 启停性能测试 | 空载测试,目测电机启动是否丝滑无振动 | 见视频运行结果 | 视频:Test2 StartStop Performance.MP4 |
| 3 | 速度控制精度测试 | 目标转速100RPM、200RPM, 通过MA600A寄存器读对应速度值 | 测试报告记录:电机减速箱后出轴端 100 rpm下扰动3rpm、输出轴 200 rpm 下,8rpm | 视频:Test3 Speed Control Accuracy.MP4 |
| 4 | 位置控制精度测试 | 目标角度90°、180°, 通过MA600A寄存器读对应角度值 | 几乎无误差 | 视频:Test4 Position Control Accuracy |
| 5 | 负载输出能力测试 | 带载持续运行,可结合实际情况选择验证方式 1.通过10cm力臂实际带载2kg,验证可支持≥6A相电流 2. R+L模型模拟: 负载星型连接,每相取3Ω+200μH HSA=L, LSA=H;HSC=L, LSC=H HSB=20khz PWM 62% 占空比,LSB 与其互补; 测量该条件下IOUTB或48V母线侧电流大小 | 当该项目等效功率60W等级。本仓库对于60W等级和180W等级分别进行了测试,详情可见下面说明。 | 视频:LoadTEST.MP4 |
| 6 | 负载输出能力补充测试 | 10cm力臂,2kg负载,48Vbus 265rpm下连续运行30分钟,测量电机NTC热敏电阻(10K 3950)对应阻值 | 同上 | 视频:LoadTEST.MP4 |
4.2 测试平台
为验证持续带载能力,本项目搭建了双电机对拖测试平台:左侧电机作为驱动,右侧电机作为发电机,经过整流后接入电子负载或实验台架。右图中的测试设备只用到了Load与DC source。
| 测试平台总览 | 实验台架与测量设备 |
|---|---|
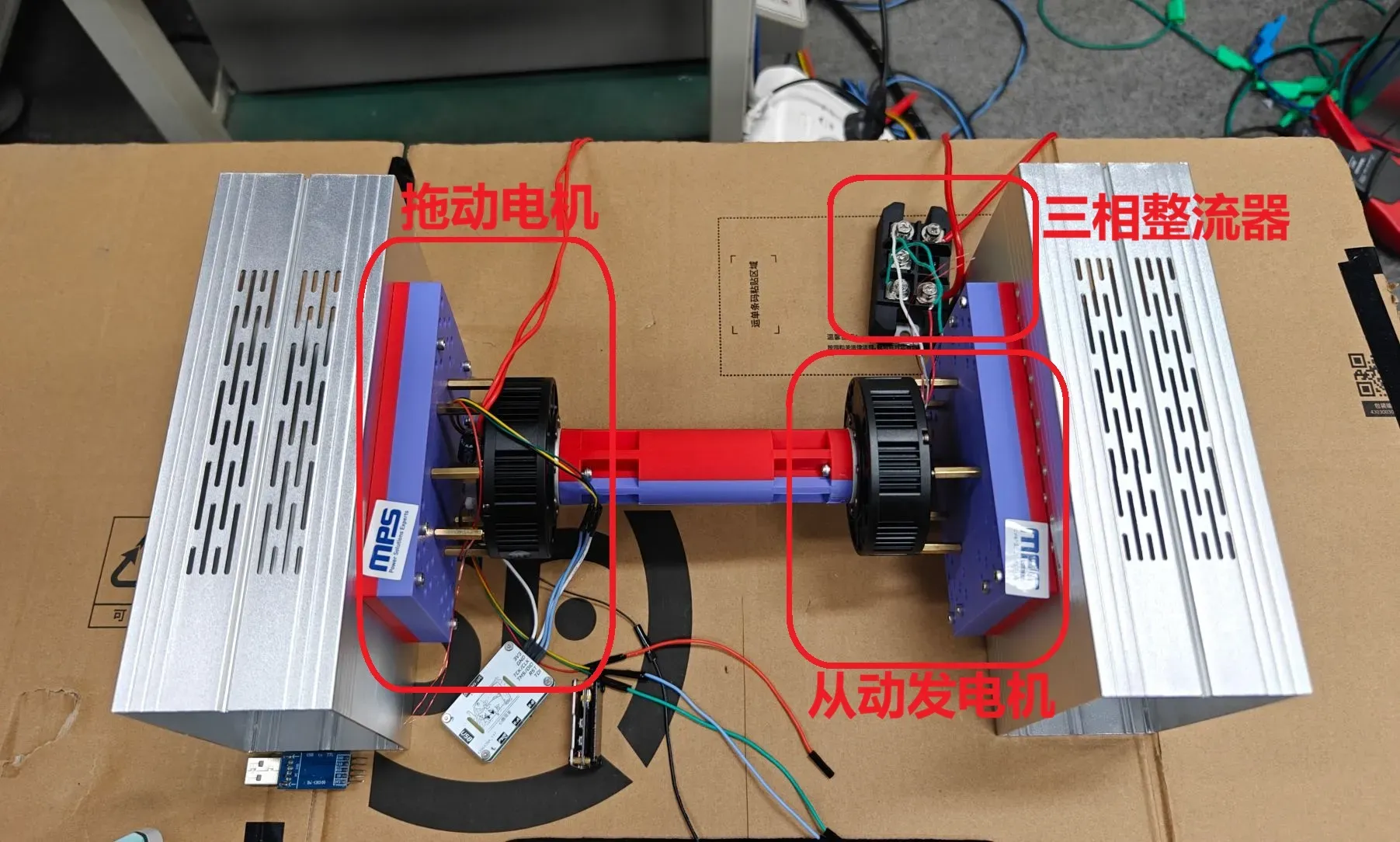 | 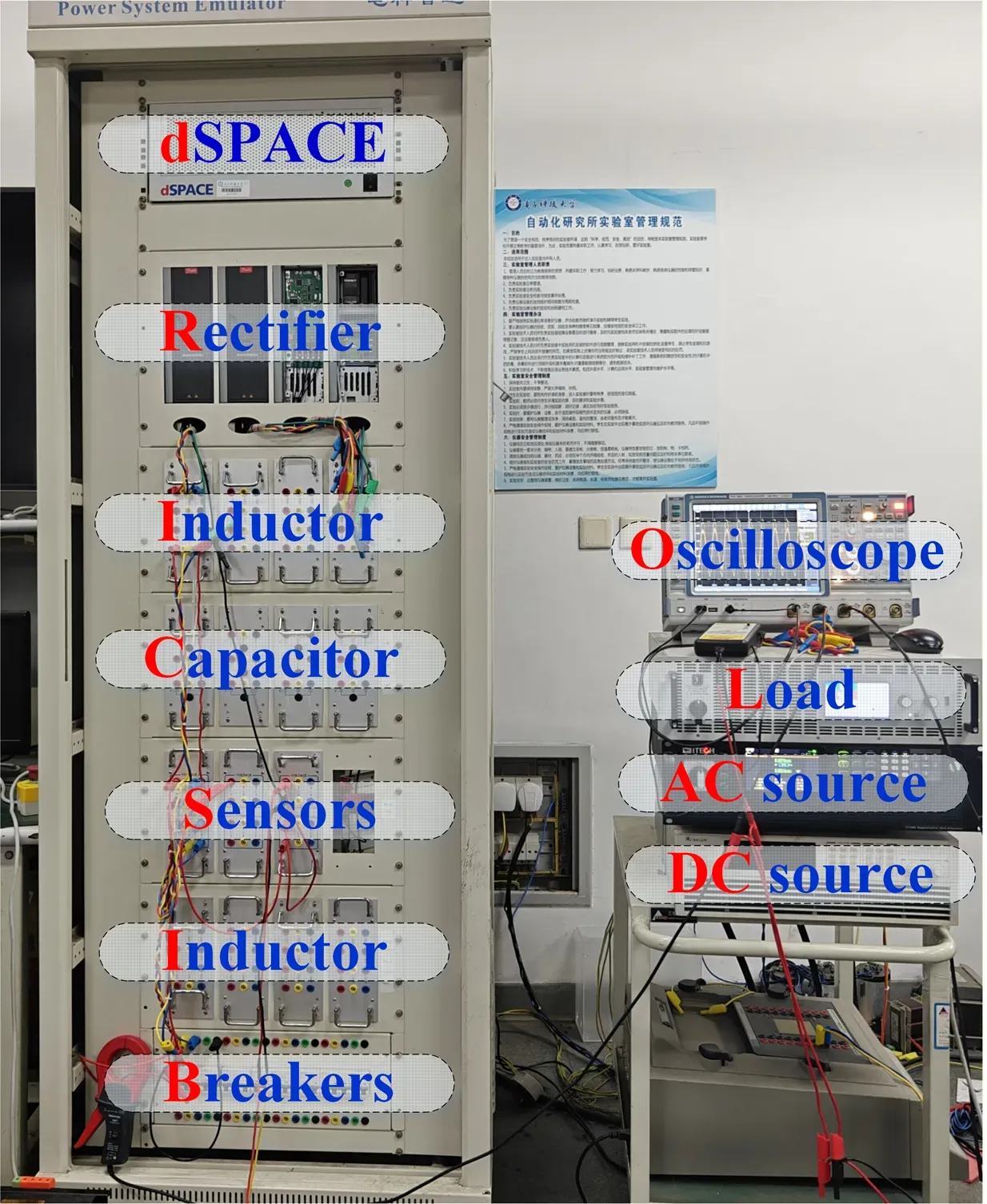 |
| 图 4-1. 双电机对拖测试平台,标出了驱动电机、发电机与整流链路。 | 图 4-2. 实验台架与测量设备,包含整流器、负载、示波器及交直流电源。 |
4.3 单项测试数据
4.3.1 电源输入测试
详见视频
4.3.2 启停性能测试
详见视频
4.3.3 速度控制精度测试
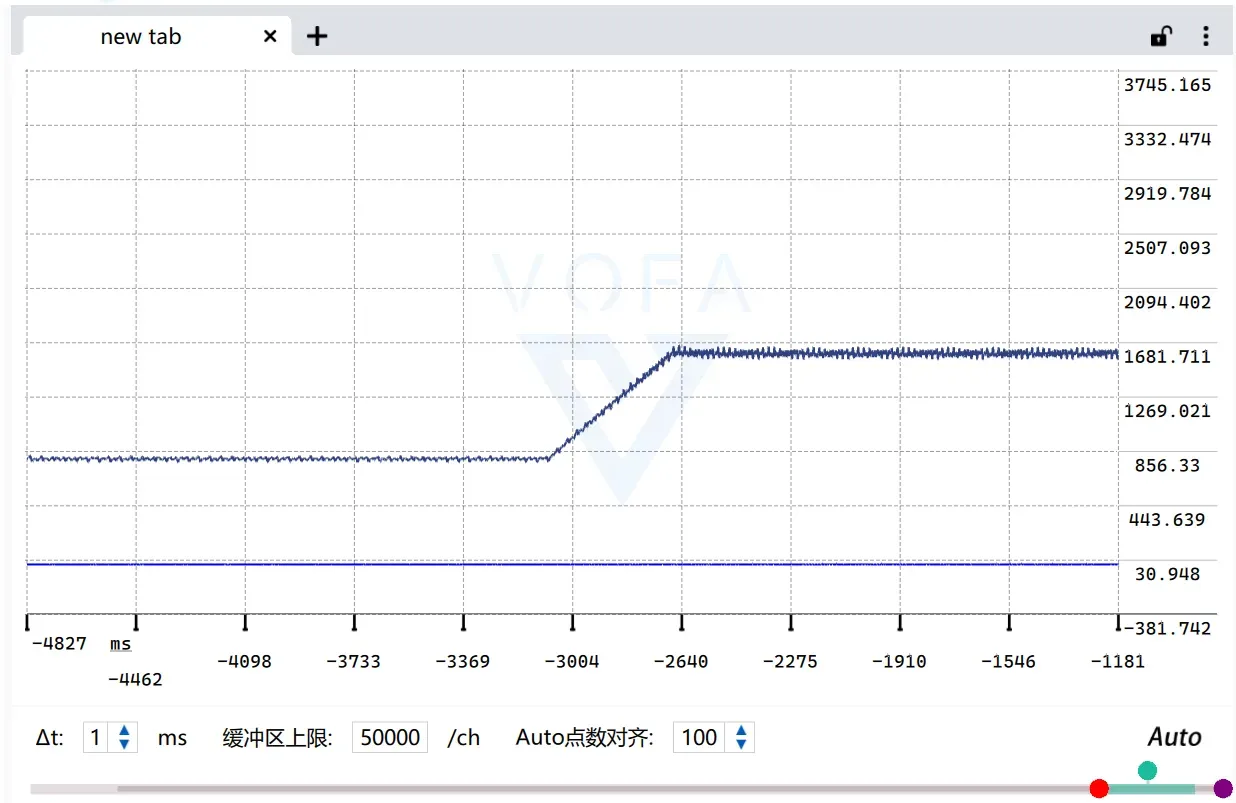
如上图所示,为速度控制时的精度与扰动情况;图中数据为电机输出轴之前的机械转速 RPM。
4.3.4 位置控制精度
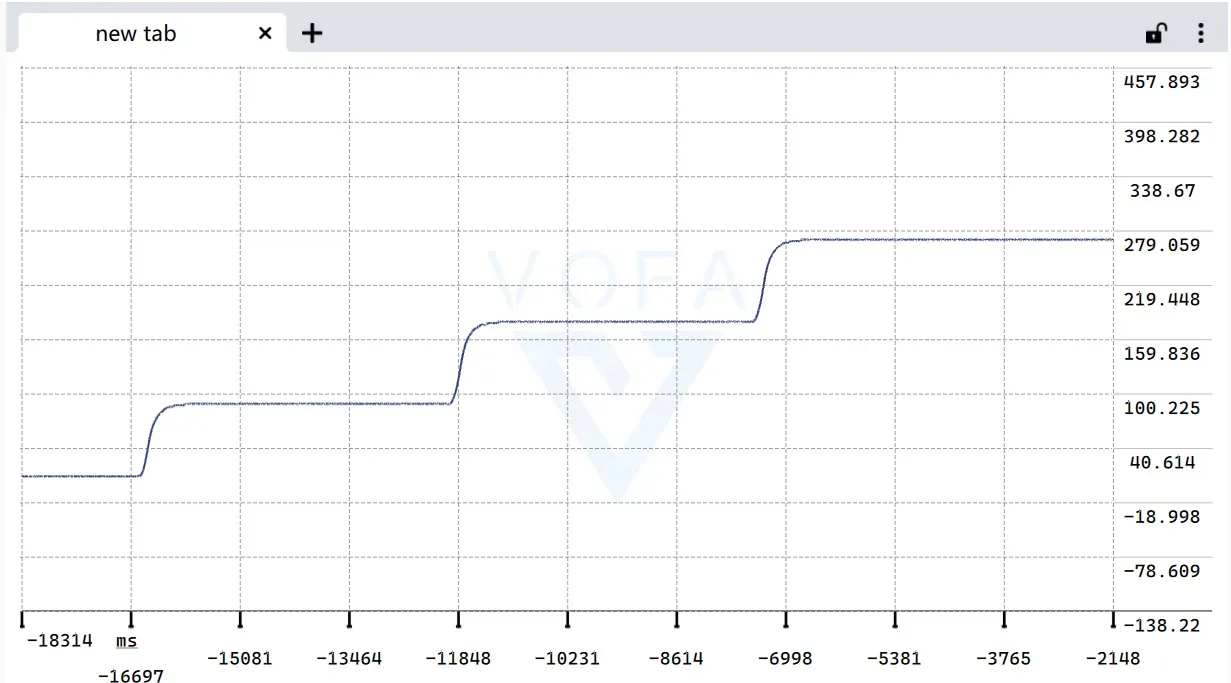
如图所示,位置阶跃响应基本无静差,可作为位置控制精度验证结果。
4.3.5 负载输出能力与热测量
负载输出测试可参考 LoadTEST.MP4。仓库中给出了 180W 持续带载运行示例,高于赛题要求的功率等级,可作为硬件热设计与连续输出能力的参考,赛题要求的功率等级测试视频可以参考:30mins 流体负载测试 更科学_哔哩哔哩_bilibili。
| 2 min 温升热像 | 8 min 温升热像 |
|---|---|
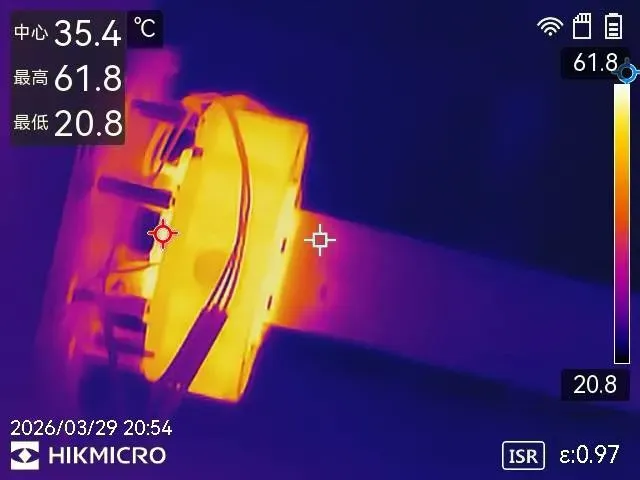 | 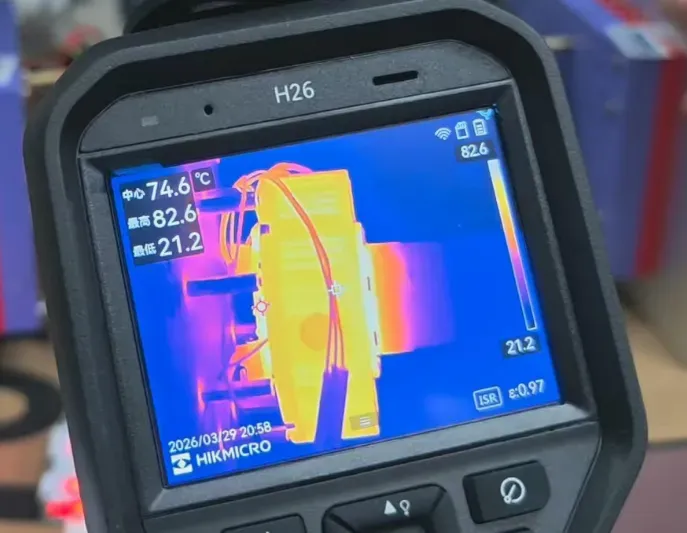 |
图 4-3. 连续带载 2 min 时的热成像,中心温度约 35.4 °C,最高温度约 61.8 °C。 | 图 4-4. 连续带载 8 min 时的热成像,壳温约 74.6 °C,最高热点约 82.6 °C。 |
运行 8 min 后,系统热点约提升至 82.6 °C,可作为当前 180W 工况下的温升参考。
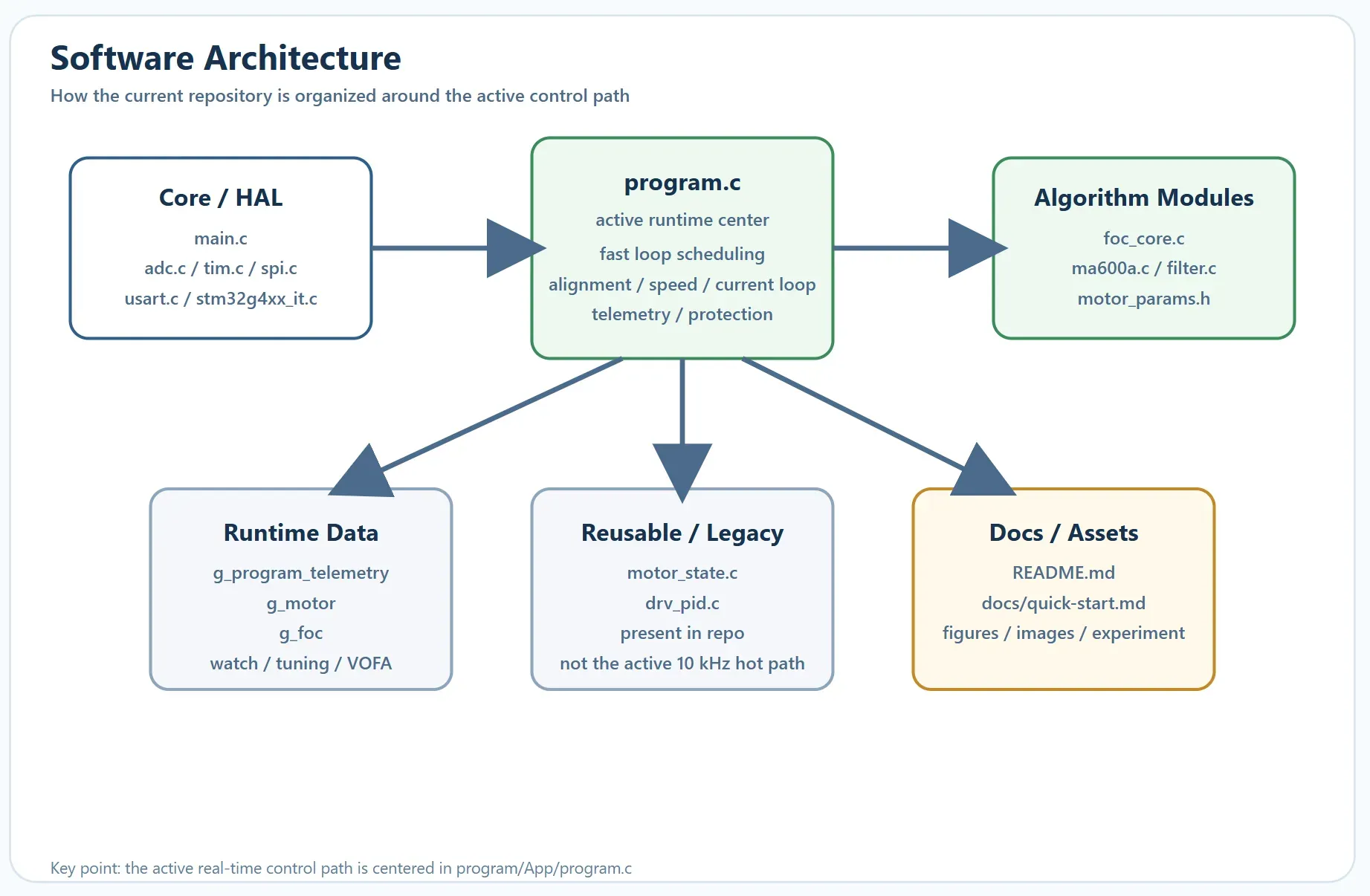
5. 软件架构
5.1 软件结构图
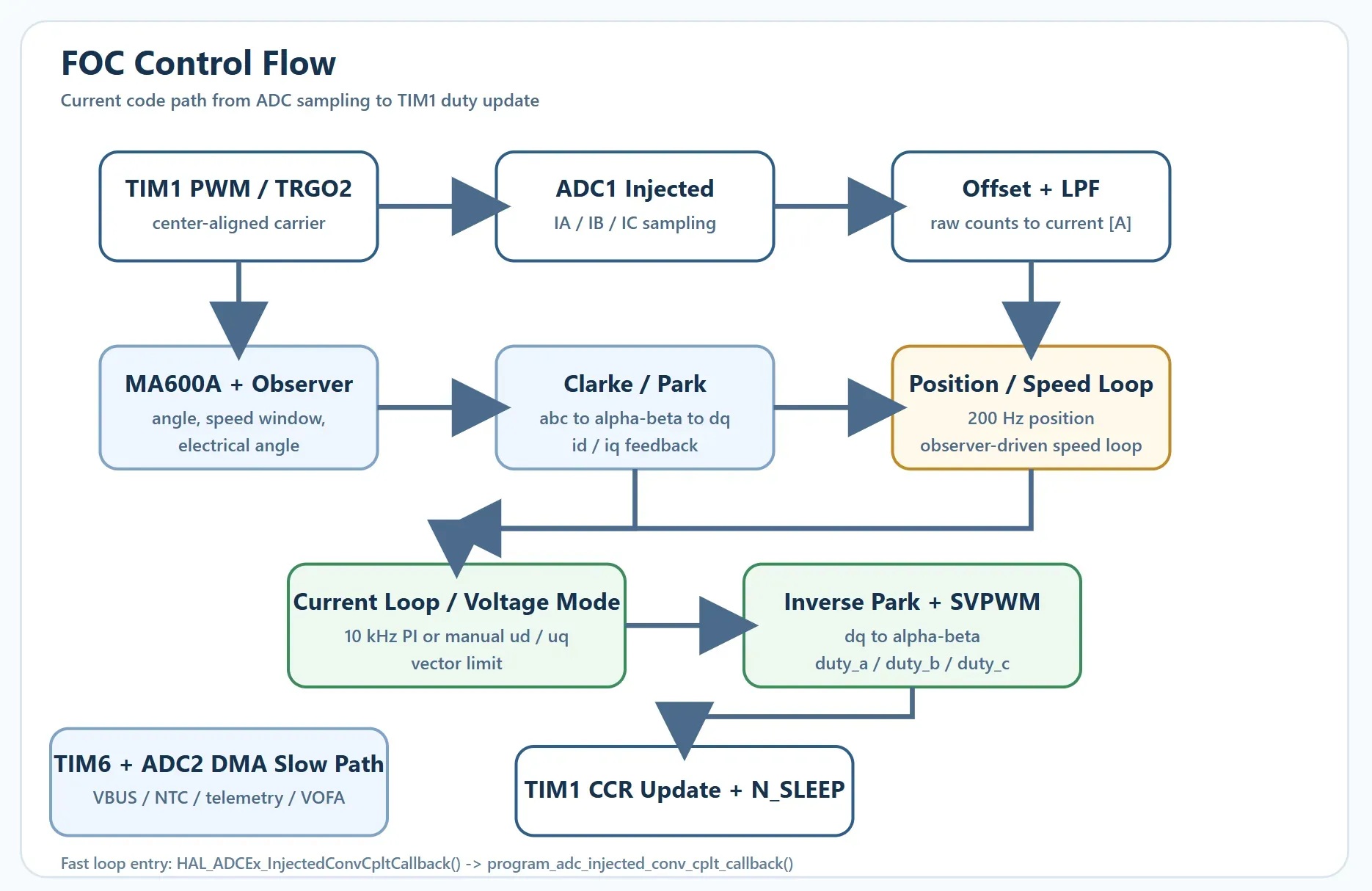
5.2 控制流程图
5.3 代码组织
| 📁 目录 / 文件 | 🧠 职责 |
|---|---|
program/Core/ | HAL 初始化、IRQ、CubeMX 生成外设配置 |
program/App/program.c | 当前真实控制主链路、快慢环调度、保护、telemetry |
program/App/foc_core.c | Clarke / Park / 反 Park / SVPWM |
program/App/ma600a.c | MA600A 绝对值编码器驱动 |
program/App/filter.c | 一阶低通滤波器 |
program/App/cli_uart.c | VOFA / DMA 串口发送 |
program/App/drv_pid.c | 通用 Q15 PI 组件,当前不在 10 kHz 热路径主链里 |
program/App/motor_state.c | 状态对象与保留状态机逻辑 |
docs/ | 补充说明、调试文档、图像资源 |
6. 接口说明
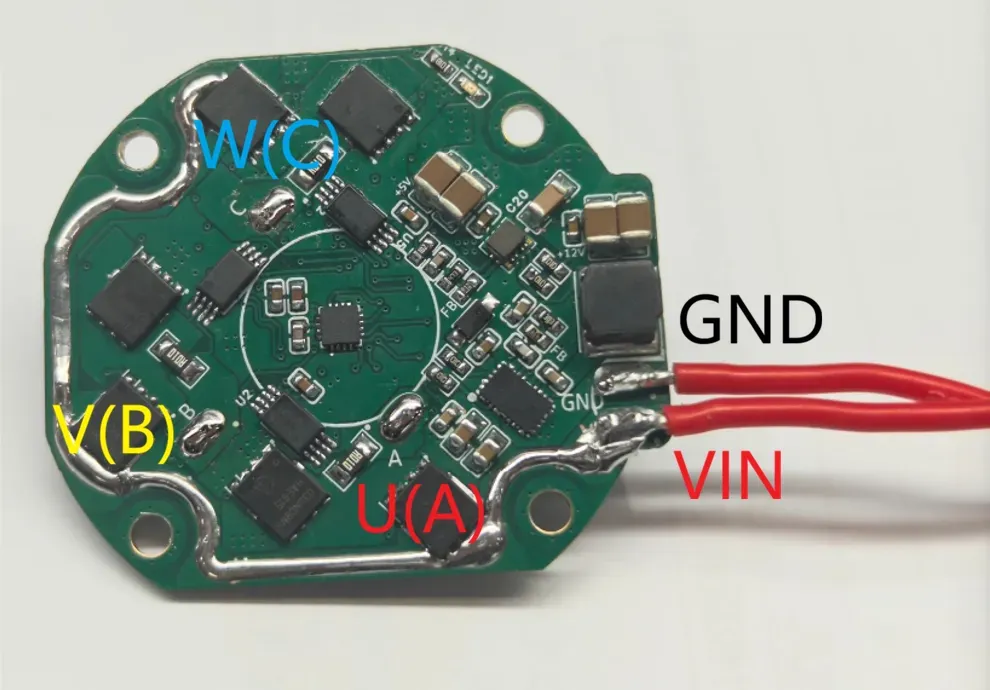
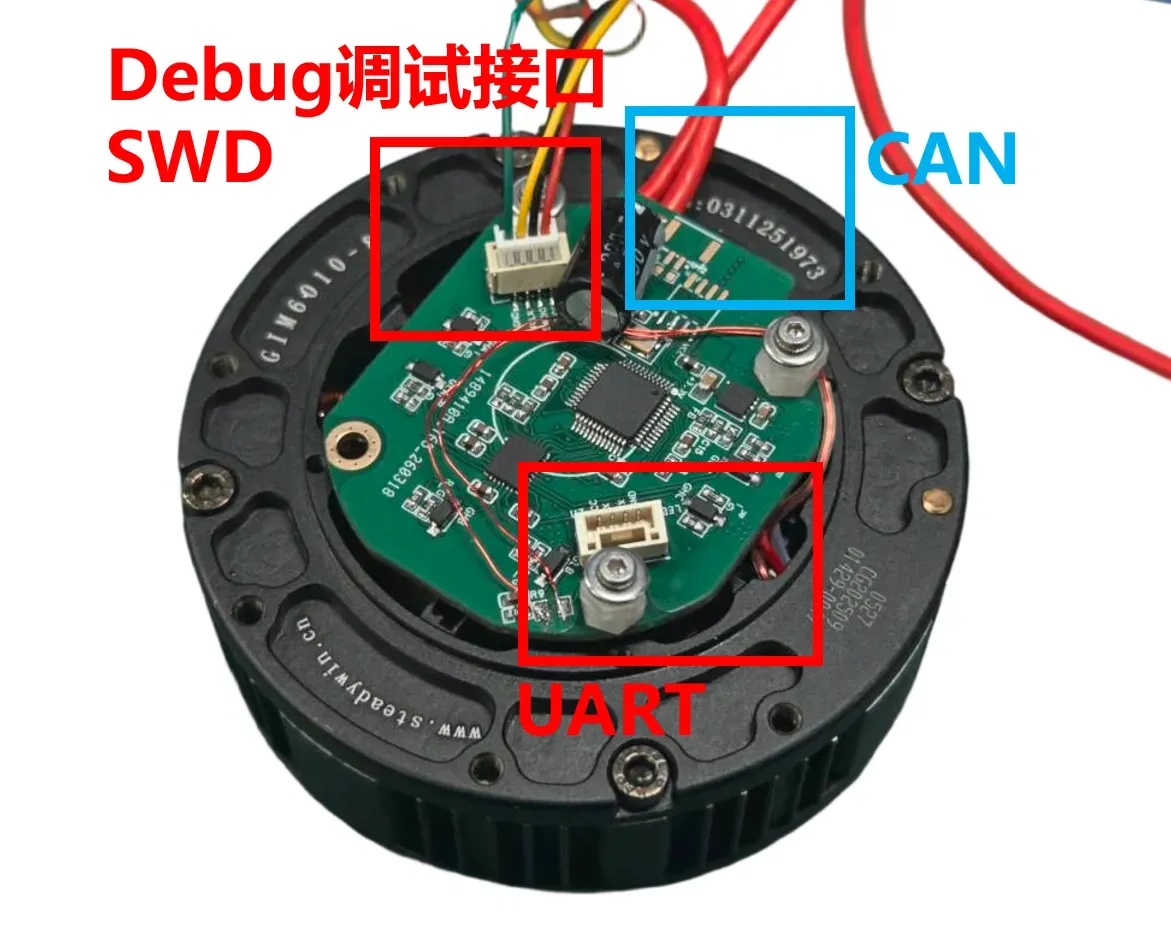
6.1 板级硬件接口
- 如下图所示为电源与UVW(ABC)三相出线端接口,请注意,如果上电你的电机无法正常运转,此处有一个很重要的问题可能是你的编码器正方向和三相电相序不符。这时候,可以将代码里面的
MOTOR_ENCODER_DIRECTION_SIGN进行反相,或者对调某两根相线。
- 如下图所示为通讯接口,按照板子上自带的丝印进行链接即可。
- 以下接口定义以当前仓库
V1.2硬件和 CubeMX 配置为准,主要来源于program/Core/Src/tim.c、program/Core/Src/adc.c、program/Core/Src/spi.c、program/Core/Src/usart.c与program/Core/Src/gpio.c。
本节只说明板级接口和引脚映射;器件选型与供电分工见 3.2 节。
| 接口类别 | MCU / 外设 | 引脚 | 方向 | 当前约定 |
|---|---|---|---|---|
| 三相 PWM 驱动 | TIM1_CH1/2/3 + CH1N/2N/3N | PA8/PA9/PA10 + PC13/PB0/PB1 | 输出 | 六路互补 PWM,接入 MP6539B 预驱 |
| 三相电流采样 | ADC1_IN1 / IN3 / IN4 | PA0 / PA2 / PA3 | 输入 | IA / IB / IC 注入组同步采样 |
| 母线电压采样 | ADC2_IN12 | PB2 | 输入 | VBUS,由 ADC2 + DMA 周期采样 |
| NTC 温度采样 | ADC2_IN14 | PB11 | 输入 | 电机或板级热敏电阻输入 |
| 编码器接口 | SPI1 + ENC_CS | PA5 / PA6 / PA7 + PA4 | 双向 | 对接 MA600A 绝对值编码器 |
| 功率级使能 | N_SLEEP | PB14 | 输出 | 1 = 使能,0 = 关断 |
| 驱动故障输入 | N_FAULT | PB15 | 输入 | 上拉输入,0 = 故障有效 |
| 调试串口 | USART1 | PB6 / PB7 | TX / RX | 默认 115200 8N1,当前主要用于上位机调试 |
| 预留通信口 | FDCAN1 | PA11 / PA12 | RX / TX | 预留通信口,当前仅完成 CubeMX 初始化,未接入上层协议 |
6.2 通信与调试接口
| 接口 | 默认配置 | 当前用途 |
|---|---|---|
SPI1 | 主机模式、16-bit、CPOL=1、CPHA=2EDGE、软 NSS、分频 8 | 专用于 MA600A 角度读取,不建议与其他器件混挂 |
USART1 | 115200、8N1、无流控、TX DMA | 当前输出 VOFA JustFloat 调试数据;RX 引脚已预留,但仓库暂未实现上位机命令协议 |
FDCAN1 | PA11 / PA12,当前保留 CubeMX 默认初始化参数 | 预留通信口;当前仅执行 MX_FDCAN1_Init(),未作为稳定外部接口开放 |
TIM6 + ADC2 DMA | 1 kHz 慢任务节拍 | 后台采样 VBUS / NTC 并驱动调试刷新 |
当前对外稳定的程序访问入口主要有两个:
motor_state_t *program_get_motor(void);
const volatile program_telemetry_t *program_get_telemetry(void);
其中 program_get_motor() 适合调试阶段直接改写控制命令,program_get_telemetry() 适合统一读取观测量。
6.3 软件写入接口
当前项目没有另外封装一层命令协议,调试和 bring-up 默认直接通过 g_motor 或 program_get_motor() 写入控制量。常用写入项如下:
| 写入变量 | 单位 / 取值 | 作用 |
|---|---|---|
g_motor.run_request | 0 / 1 | 总运行使能;置 1 后状态机才允许对齐、使能功率级并开始发波 |
g_motor.current_loop_enable | 0 / 1 | 0 为开环电压模式,1 为电流环模式 |
g_motor.speed_loop_enable | 0 / 1 | 1 时速度环接管转矩给定 |
g_motor.position_loop_enable | 0 / 1 | 1 时位置环输出速度参考,需同时开启速度环 |
g_motor.control_angle_open_loop_enable | 0 / 1 | 1 时改为开环生成电角度,不使用 MA600A 闭环角度 |
g_motor.ud_ref / g_motor.uq_ref | V | 开环电压模式直接给定 d/q 轴电压 |
g_motor.speed_ref_mech_rpm | rpm | 速度环目标机械转速 |
g_motor.position_ref_mech_deg | deg | 位置环目标机械角度;推荐作为唯一外部位置指令入口 |
g_motor.iq_limit | A | 电流 / 转矩限幅 |
g_motor.speed_kp / g_motor.speed_ki | - | 速度环参数 |
g_motor.position_kp | - | 位置环比例参数 |
6.4 软件观测接口
推荐统一从 g_program_telemetry 读取观测量,而不是在多个模块之间分散查找临时变量。常用观测量如下:
| 观测类别 | 典型字段 | 用途 |
|---|---|---|
| 原始采样 | ia_raw ib_raw ic_raw vbus_raw ntc_raw | 检查 ADC 量程、零偏和采样链路 |
| 电流与角度 | ia ib ic id iq theta_elec | 检查 FOC 变换与电流闭环状态 |
| 速度与位置 | speed_meas_mech_rpm position_meas_mech_deg position_meas_mech_rad | 检查测速、位置环与编码器方向 |
| 控制命令镜像 | speed_ref_mech_rpm position_ref_mech_deg iq_limit_a | 核对外部给定是否正确进入控制链 |
| 运行状态 | control_state power_stage_enabled driver_fault_active fast_loop_overrun | 判断状态机、功率级和实时性是否正常 |
6.5 使用注意事项
g_motor.position_ref_mech_deg是当前项目建议的外部位置指令入口;position_ref_mech_rad更适合看作程序内部换算后的只读镜像。N_FAULT为低有效,驱动器报错时会直接进入故障处理并拉低功率级使能。run_request建议最后置位;在修改模式位和参考值后再启动,可以减少上电瞬间的误动作。- 当前仓库默认
iq_limit = 12 A是比赛带载验证时的调试上限,不代表GIM6010-8的长期额定连续电流。 - 更换电机、减速比、编码器安装位置或方向后,除了改
program/App/motor_params.h,还应重新核对program/App/program.c的环路参数和限幅设置。
7. 控制实现说明
7.1 控制流程说明:从 ADC 采样到 PWM 输出
当前工程的实际控制链路如下:
TIM1输出中心对齐 PWM,并通过TRGO2 = UPDATE触发ADC1 injected。ADC1一次完成IA / IB / IC三路电流采样。- 在
HAL_ADCEx_InjectedConvCpltCallback()中读取三相原始值。 - 启动阶段累计
1024个样本,得到每相零偏。 - 同步调度
MA600A读角,更新机械角、电角度和测速窗口。 - 原始电流码值转换为安培值,并做一阶低通。
- 执行
Clarke / Park,得到id / iq。 - 位置环按
200 Hz分频运行,输出机械速度参考。 - 速度环按测速窗口更新运行,输出
iq_ref或uq_ref。 - 电流环按
10 kHz运行,输出ud_ref / uq_ref。 - 反
Park后进入SVPWM。 - 将
duty_a / duty_b / duty_c写入TIM1->CCR1/2/3。
7.2 中断结构 / 控制周期
快环入口调用链:
ADC1_2_IRQHandler
-> HAL_ADC_IRQHandler(&hadc1)
-> HAL_ADCEx_InjectedConvCpltCallback()
-> program_adc_injected_conv_cplt_callback()
慢环入口调用链:
TIM6_DAC_IRQHandler
-> HAL_TIM_IRQHandler(&htim6)
-> HAL_TIM_PeriodElapsedCallback()
当前工程对应的运行频率:
| ⏱️ 项目 | 当前值 | 触发源 / 说明 |
|---|---|---|
| PWM 载波 | 约 20 kHz | TIM1 center-aligned + ARR=4249 + RCR=3 |
| 电流环 | 10 kHz | ADC1 injected 完成回调 |
| 位置环 | 200 Hz | 快环分频 |
| 速度测速窗口 | 20 个快环样本 | PROGRAM_SPEED_OBSERVER_WINDOW_SAMPLES |
| 速度环有效更新率 | 名义 500 Hz | 由测速窗口更新驱动 |
| 慢任务节拍 | 1 kHz | TIM6 中断 + TIM6 TRGO -> ADC2 |
慢环主要处理:
ADC2 + DMA采集VBUS / NTCprogram_task()在while(1)中按TIM6节拍执行后台任务和遥测输出
8. 快速开始
此处重点关注 g_motor 控制参数结构体。更详细的 bring-up 与三环调试说明见 docs/quick-start.md;如果是更换电机、减速器或编码器安装方式,请同时参考 docs/适配新电机的标准流程.docx。
8.1 开发环境
- IDE:Keil / MDK
- 工程文件:
program/MDK-ARM/STM32G431_FOC.uvprojx - CubeMX 工程:
program/STM32G431_FOC.ioc - 下载方式:CMSIS-DAP Debugger
8.2 程序上电后自动完成的内容
ADC1 / ADC2校准TIM1PWM 启动并保持50%占空比- 三相电流零偏累计
ADC2 DMA开始采集VBUS / NTCMA600A首次读角
8.3 第一次跑起来的推荐配置
建议第一次出力先不要直接上速度环,而是先做开环电压测试:
g_motor.current_loop_enable = 0;
g_motor.speed_loop_enable = 0;
g_motor.position_loop_enable = 0;
g_motor.ud_ref = 0.0f;
g_motor.uq_ref = 0.5f; /* 从小值开始 */
g_motor.run_request = 1; /* 最核心的启动信号,启动这个才开始运行发波 */
程序会先自动做对齐,再进入基于编码器角度的手动电压模式。
8.4 固定占空比 PWM 发波测试(不接电机)
当需要单独验证 TIM1 + MP6539B 的三相发波链路时,可以直接在调试器里写 g_program_debug_pwm_test,不依赖 run_request、编码器闭环或正常 FOC 输出。
推荐操作顺序:
g_program_debug_pwm_test.duty_a = 0.30f;
g_program_debug_pwm_test.duty_b = 0.40f;
g_program_debug_pwm_test.duty_c = 0.60f;
g_program_debug_pwm_test.enable = 1U;
测试完成后请恢复:
g_program_debug_pwm_test.enable = 0U;
注意事项:
- 该模式只用于示波器观察三相 PWM,占空比范围为
0.0~1.0。 - 进入测试模式前请断开电机或确保功率级不带机械负载,避免误转动。
- 该模式在快环中直接下发
TIM1->CCR1/2/3,正常电流环 / 速度环 / 位置环输出会被旁路。 - 若
N_FAULT有效,程序仍会关闭功率级,不会继续维持固定占空比输出。
8.5 模式控制说明
模式变量的完整定义见 6.3 软件写入接口。这里仅保留首次调试最常用的组合方式:
- 开环电压测试:
current_loop_enable = 0,speed_loop_enable = 0,position_loop_enable = 0 - 电流环调试:
current_loop_enable = 1,speed_loop_enable = 0,position_loop_enable = 0 - 速度环调试:
current_loop_enable = 1,speed_loop_enable = 1,position_loop_enable = 0 - 位置环调试:
current_loop_enable = 1,speed_loop_enable = 1,position_loop_enable = 1
位置外部给定建议直接写 g_motor.position_ref_mech_deg。
8.6 首次需要看的变量
| 👀 变量 | 正常现象 |
|---|---|
current_offset_ready | 上电后置位 |
ia / ib / ic_meas | 静止时接近 0 |
i_abc_sum | 接近 0 |
ma600a_angle_rad | 手动转动时连续变化 |
driver_fault_active | 0 |
fast_loop_overrun | 0 |
8.7 三环由内到外的闭环调试顺序
不要跳步,建议严格按“由内到外”执行:
| 阶段 | 🎯 目标 | 🔧 推荐配置 | 👀 重点观察 |
|---|---|---|---|
| Stage 0 | 静态链路确认 | run_request = 0 | ia/ib/ic vbus ma600a_angle_rad |
| Stage 1 | 验证出力方向 | 关速度环、关位置环 | uq_ref theta_elec |
| Stage 2 | 调电流环 | 开电流环,关外环 | id iq ud_ref_cmd uq_ref_cmd |
| Stage 3 | 调速度环 | 开速度环,位置环保持关闭 | speed_ref_mech_rpm speed_meas_mech_rpm |
| Stage 4 | 调位置环 | 最后再开位置环 | position_ref_mech_deg position_meas_mech_deg |
8.8 当前运行默认参数
以下为当前主路径实际生效的默认参数,来源于 program/App/program.c:
电流环带宽计算,可以看代码注释,当前电流环带宽为1Khz。
| 🧪 参数 | 当前值 |
|---|---|
current_kp | 2.5761 |
current_ki | 4555.31 |
speed_kp | 0.0015 |
speed_ki | 0.015 |
position_kp | 3.0 |
position_ki | 0.0 |
iq_limit | 12.0 A |
更详细的 bring-up 和三环调试步骤见 docs/quick-start.md。
9. 新电机适配流程
本节是对 docs/适配新电机的标准流程.docx 的 README 版精简,专门按当前工程的真实落点整理。建议和 docs/quick-start.md 配合使用:前者解决“换电机时哪些参数必须重设”,后者解决“代码怎么一步步 bring-up”。
9.1 先确认基础参数
在改代码前,至少先确认以下信息:
- 极对数
pole pairs - 是否带减速器,以及实际减速比
gear ratio - 编码器装在电机轴还是输出轴
- 电机正转时,编码器读数是增大还是减小
- 相电阻
R、相电感L、扭矩常数Kt - 电机额定/峰值电流,以及推荐母线电压范围
这些信息不清楚时,不要直接进速度环或位置环。对本工程来说,极对数、减速比、编码器安装侧和方向任一项填错,都可能把负反馈接成正反馈,表现为对齐失败、抖动、发热、无力或闭环发散。
9.2 先改哪两个文件
| 文件 | 关键宏 / 参数 | 在本项目中的作用 |
|---|---|---|
program/App/motor_params.h | MOTOR_POLE_PAIRS MOTOR_GEAR_RATIO MOTOR_ENCODER_ON_OUTPUT_SHAFT MOTOR_ENCODER_DIRECTION_SIGN | 决定机械角/速度到转子侧、电角度与输出轴量的换算关系,是最先要改的几何与方向参数 |
program/App/program.c | PROGRAM_DEFAULT_IQ_LIMIT_A PROGRAM_CURRENT_LOOP_EQ_RESISTANCE_OHM PROGRAM_CURRENT_LOOP_EQ_INDUCTANCE_H PROGRAM_DEFAULT_CURRENT_LOOP_BANDWIDTH_HZ PROGRAM_ALIGN_UD_V PROGRAM_ALIGN_HOLD_TICKS | 决定首次 bring-up 的限流、电流环 PI 初值以及编码器对齐强度,换电机后通常都要重新核对 |
当前代码默认值分别是:
motor_params.h:14极对、8:1减速比、编码器在转子侧、方向符号-1program.c:iq_limit = 12 A、R_eq = 0.725 Ω、L_eq = 0.410 mH、默认电流环带宽1 kHz、对齐电压1.8 V、对齐保持8000个快环节拍
要特别注意,program.c 里的 R_eq / L_eq 是当前板级电流环在 10 kHz 快环下用于 PI 计算的等效对象参数,不一定等于电机数据手册里的原始相间电阻/电感。换电机时可以先用新电机的 R/L 估初值,但不要机械照搬。
9.3 电流环和限流怎么起步
本工程已经按带宽生成电流环 PI:
Kp = 2π × f_bw × L_eqKi = 2π × f_bw × R_eq
首次适配建议这样起步:
- 用新电机的
R/L先估R_eq / L_eq - 把电流环带宽先放在较保守的
300 ~ 800 Hz - 先把
iq_limit压到理论安全值的20% ~ 30% - 系统安静、
iq跟随正常后,再逐步把带宽抬到800 ~ 1200 Hz
如果出现以下现象,可优先这样处理:
- 电流振荡、啸叫、明显抖动:先降带宽,或回退
R_eq / L_eq对应的Kp/Ki - 跟随很慢、扭矩发软:再小步提高带宽
- 低速正常但高速容易乱:先查编码器方向、零位对齐、母线电压裕量和电压限幅,不要只盯 PI
iq_limit 也不要直接照着电机峰值电流填。更稳妥的上限应同时受驱动板能力、电机峰值电流和目标输出扭矩约束,必要时还要结合 Kt、减速比和传动效率重新估算。
9.4 推荐 bring-up 顺序
适配新电机时,建议严格按下面顺序推进:
- 静态检查:先保持
run_request = 0,确认VBUS、三相电流零偏、MA600A通讯和手动转动时的角度/速度方向都正常。 - 低风险对齐:先用较低母线电压和较小
iq_limit做编码器对齐;若对齐锁不住,再增加PROGRAM_ALIGN_UD_V或PROGRAM_ALIGN_HOLD_TICKS,若冲击太大则反向调整。 - 只开电流环:保持
speed_loop_enable = 0、position_loop_enable = 0,在小iq_ref下观察iq跟随、dq电压是否长期打满,以及是否存在高频啸叫。 - 再开速度环:只有电流环稳定后,才进入速度环调试;否则外环只会放大底层问题。
- 最后开位置环:本工程的位置环工作在输出轴量纲下,对减速比、编码器安装侧和方向最敏感,这些参数有误时通常会在这里第一时间暴露。
9.5 适配完成的最低判定标准
满足以下条件后,再认为新电机完成了基本适配:
- 编码器对齐成功,重复上电后零位结果稳定
- 小电流闭环下无明显抖动、啸叫或振荡
iq给定能跟随,dq电压不长期饱和- 速度环在低中速区稳定
- 位置环方向正确,输出轴角度/速度量纲正确
iq_limit、母线电流和温升都在安全范围内
10. 项目目录
当前仓库的主要交付物如下:
.
|-- README.md
|-- LICENSE
|-- 3dmodel/
| `-- 3D_MPS-FOC_V1.2_2026-03-27.step # 整机 3D 模型
|-- circurit/ # 原理图、器件手册、开源广场导出文件(目录名沿用当前仓库拼写)
| |-- SCH_MPS-FOC_V1.2_2026-03-27.pdf
| |-- Gerber_MPS-FOC_V1.2_2026-03-18.zip
| `-- *.pdf # 关键器件 datasheet
|-- manufacture/ # 生产输出文件与下单说明
|-- docs/
| |-- quick-start.md # 快速开始与三环调试说明
| |-- GIM6010-48电机必要参数表.xlsx
| |-- GIM6010-8关节电机参数表.docx
| |-- 适配新电机的标准流程.docx
| |-- foc_runtime_audit_2026-03-25.md # 历史运行时审查快照
| |-- foc_current_spike_followup_2026-03-25.md # 历史电流尖峰跟进记录
| |-- foc_speed_loop_optimization_2026-03-25.md # 历史速度环优化快照
| |-- figures/ # 软件架构图、控制流程图
| `-- images/ # README 图片资源
|-- experiment/
| |-- Test1 Power Supply Input Voltage Range Test.mp4
| |-- Test2 StartStop Performance.mp4
| |-- Test3 Speed Control Accuracy.mp4
| |-- Test4 Position Control Accuracy.mp4
| `-- LoadTEST.mp4
`-- program/
|-- STM32G431_FOC.ioc # CubeMX 工程
|-- Core/ # HAL / IRQ / CubeMX 生成代码
|-- App/ # 控制算法与项目逻辑
`-- MDK-ARM/ # Keil 工程
11. 已知限制与后续计划
11.1 当前已确认的限制
- MA600A角度反馈链路,应当存在一定问题,导致速度环目前有一个波动始终存在,且1/4倍于电机机械转速,也就是2倍于电机出轴端的转速。
- 目前MA600A的反馈链路未做INL校准。
11.2 你可能会遇到的问题
-
速度环控制时抖动剧烈:可能是FOC控制板安装问题,尽量让FOC控制板贴近电机安装。但是注意不要让背后的VIN开窗部分接触到电机导电器件,在这里可以用光固化胶等方式做绝缘。
-
位置环在目标角度位置,来回小范围低频率抖动:这是由于电机减速箱的静摩擦力,和速度环的积分导致的,可以尝试增加位置环死区解决。
12. 相关文件
- 快速开始与三环调试文档
- GIM6010-48 电机必要参数表
- GIM6010-8 关节电机参数表
- 适配新电机的标准流程
- 软件结构图
- 控制流程图
- 原理图 PDF
- 3D 模型 STEP
- 生产文件目录
- CubeMX 工程
- Keil 工程
- 实验视频文件目录
- 历史运行时审查快照
- 历史电流尖峰跟进记录
- 历史速度环优化快照
13. 许可证说明
本项目基于 GNU General Public License v3.0 (GPL 3.0) 开源许可协议发布。
详细内容请参阅本仓库根目录下的 LICENSE 文件。
概要
- 允许:自由使用、修改、商业衍生
- 要求:衍生作品必须同样以 GPL 3.0 发布,并保留源码
- 禁止:不以任何方式提供源码
引用方式
MPS-FOC STM32G431
Copyright (C) 2026 MPS China University Program
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License.
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。










{kind=link}
{kind=link}