



STM32空心杯四轴飞行器/无人机
简介
这是一个基于STM32微控制器的空心杯电机四轴飞行器项目,包含飞行器本体与配套遥控器两部分,采用模块化设计,实现了稳定的自稳飞行与遥控控制。
简介:这是一个基于STM32微控制器的空心杯电机四轴飞行器项目,包含飞行器本体与配套遥控器两部分,采用模块化设计,实现了稳定的自稳飞行与遥控控制。开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
视频链接:
【STM32空心杯四轴飞行器-开源介绍】 https://www.bilibili.com/video/BV1CHPNz7ELq/?share_source=copy_web&vd_source=09b5258b191077697b13e2a0ed26a125
【STM32空心杯四轴飞行器-制作经历VLOG】 https://www.bilibili.com/video/BV1zTZJBaEMA/?share_source=copy_web&vd_source=09b5258b191077697b13e2a0ed26a125
项目简介
本项目为一款基于STM32F103C8T6主控的空心杯电机四轴飞行器项目,包含飞行器本体与配套遥控器两部分,采用模块化设计,实现了稳定的自稳飞行与遥控控制。
项目参数
- 主控芯片:STM32F103C8T6(ARM Cortex-M3 内核,72MHz 主频,64KB Flash,20KB SRAM)。
- 升压芯片:PW5100,将锂电池电压(3.7V)稳定升压至5V。
- 降压芯片:XC6206P332MR低压差线性稳压(LDO),将5V降压至稳定的3.3V给主控和外设供电。
- 充电芯片:TP4056,支持单节锂电池充电,具备过充、过放保护,板载“充电中/已满”指示灯。
- 陀螺仪芯片:MPU6050,能够实现姿态解算。
- 供电方式:板载3.7V锂电池供电,通过 USB Type-C 接口充电。
- 通信方式:采用NRF24L01无线射频模块。
- 显示数据:采用0.96寸的OLED模块显示数据。
原理解析(硬件说明)
- 充电供电电路:
采用TYPE-C-6P接口作为供电接口,当接入typec时,供电由锂电池供电转为typec供电,同时给锂电池充电,此时LED3亮,LED4不亮。充满电时LED3不亮,LED4亮。当未接锂电池时,两个LED都亮。 - 电源电路:
采用PW5100进行升压,将3.7V锂电池升压至5V。再经过XC6206P332MR降压至稳定的3.3V给主控和外设供电。先升压后降压的方式能够避免输给主控3.3V不稳的情况。 - 电机驱动电路:
采用A03400A的NMOS驱动。每个PWM对应每个电机,当PWM为高电平时MOS管导通,电机转动。电机转动的快慢与PWM相关联。 - 电机指示灯电路:
同样是用A03400A的NMOS驱动。每个PWM对应每个LED,当PWM为高电平时MOS管导通,LED亮。LED的亮度与PWM相关联。 - 通信电路:
采用NRF24L01模块进行通信,因为采用的是模块所以直接插上去就可以用。 - 陀螺仪电路:
采用经典的MPU6050芯片。 - 遥杆电路:
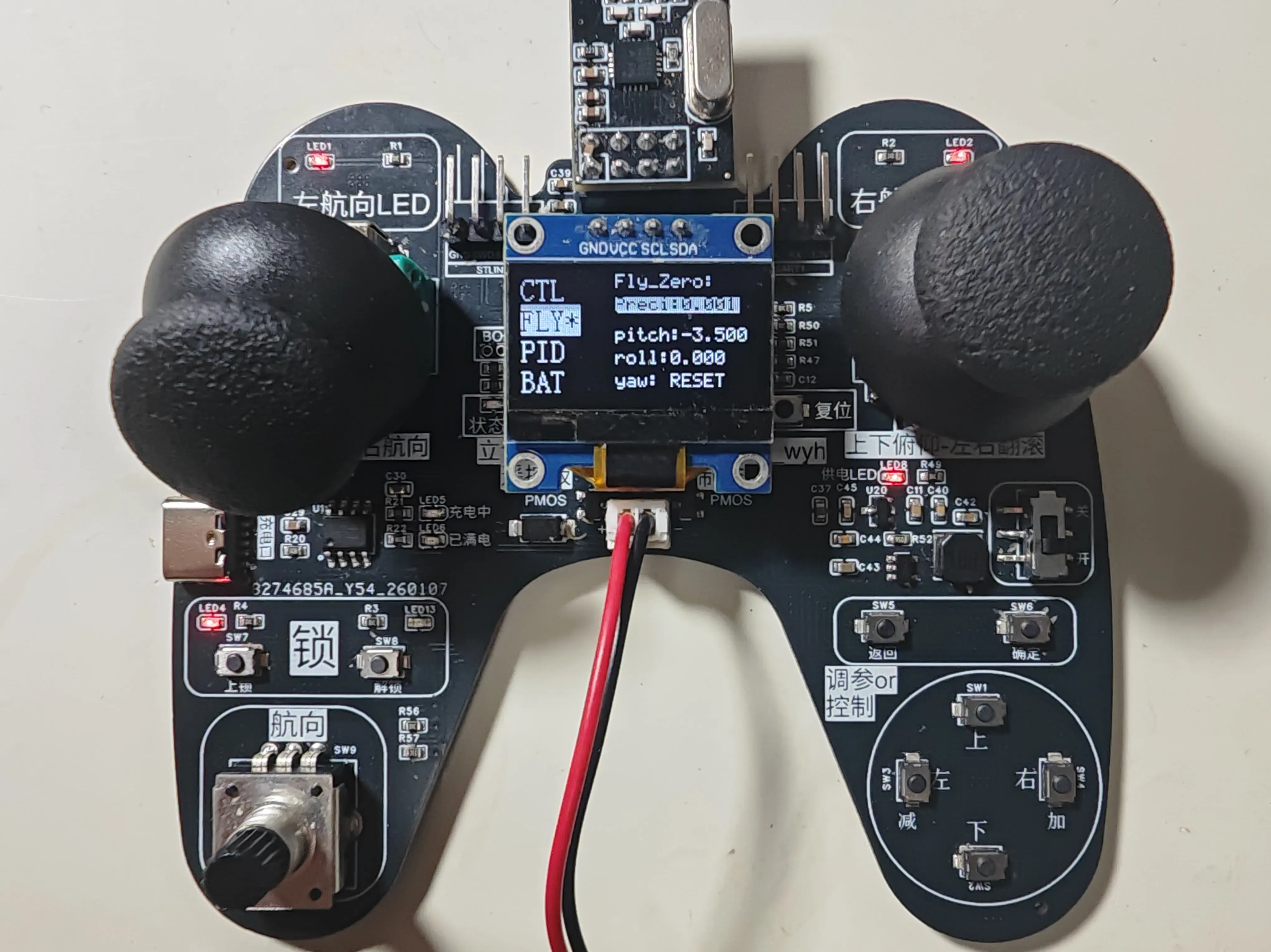
两个遥感,左摇杆控制油门大小,右遥杆控制方向 - 按键电路:
除了复位按键外,遥控板用到了8个按键,左侧两个是上锁解锁。右侧是用于控制OLED上的选项(含调试功能) - 编码器电路:
用于控制飞机航向 - OLED显示电路:
采用OLED模块进行显示数据,可用于飞控调试 - LED电路:
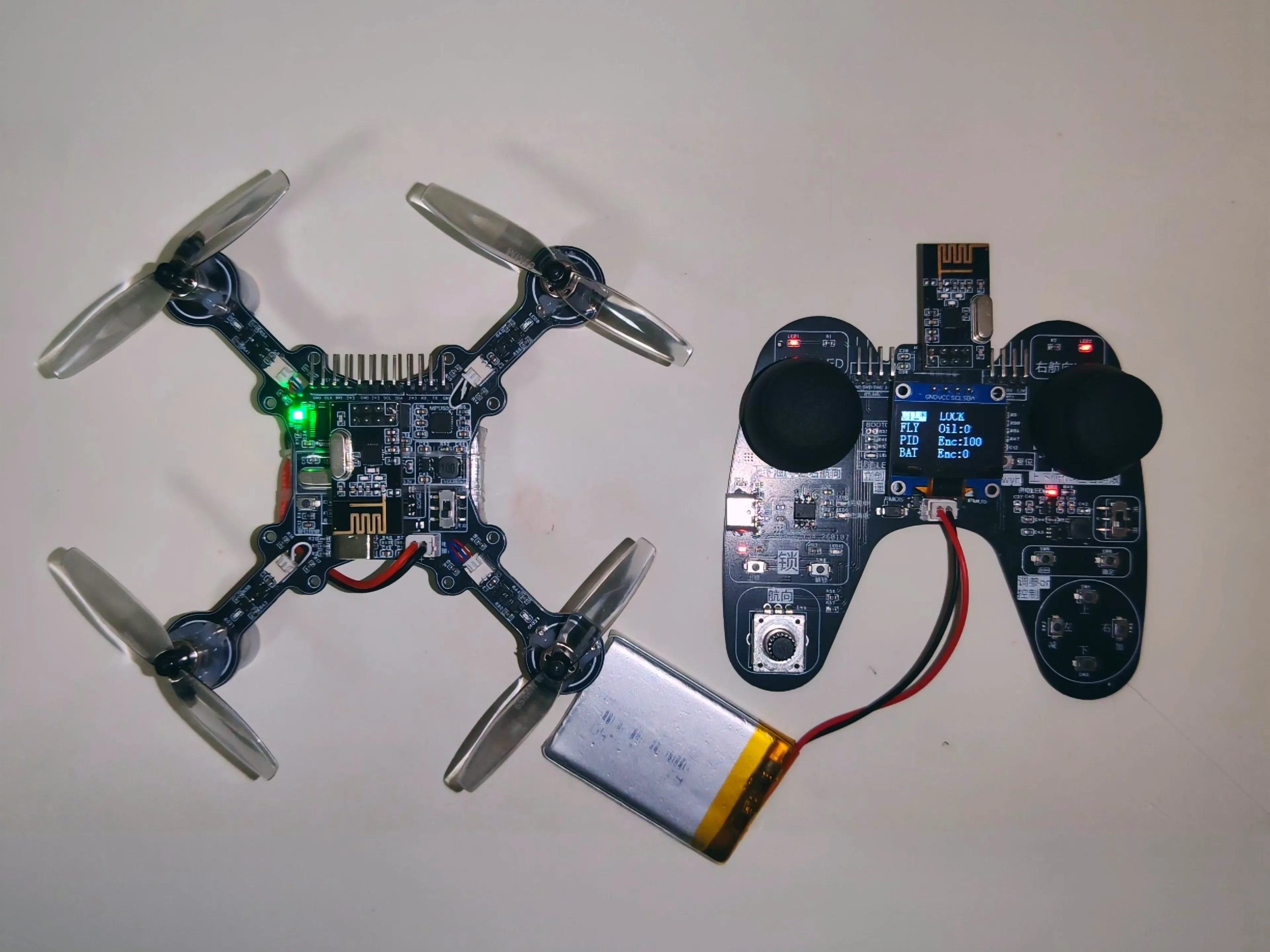
飞控指示灯:
绿色状态指示灯闪烁:与遥控器未连接
绿色状态指示灯常亮:与遥控器连接成功
绿色状态指示灯快速闪速:飞控的电量不足
原理解析(软件说明)
代码我放到了资料网盘里,
关于参数调节(在遥控代码里):
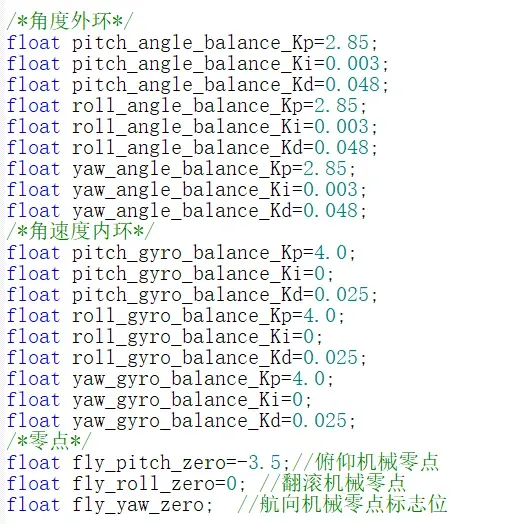
PID参数可以在我给的基础上微调;
零点参数调节方法是:
给予四轴一定的油门(能飞,但不高);
如果前倾,fly_pitch_zero减小;
如果左倾,fly_roll_zero减小。
当然,我们调参一般是拿着遥控器来调,在遥控器里的FLY中调零点,PID中调PID参数。

更新进度:
当前资料为正式1.0版本,更新版本会在这里描述。
大更新:每更新一个电路板就更新一个版本;
小更新:电路板不变,代码更新,会在资料里进行说明。
注意事项
- 每个人组装产生的误差不一样,就意味着需要自己调试。
- 多引脚芯片焊接难度较大,容易产生虚焊、连锡等问题。
- 空心杯电机的寿命较短,不要让飞机经受过多的碰撞。
- LED可根据自己喜好选择,这个无要求。
- PCB的BOOT0电路的焊盘处不要贴电阻(原理图已经说明)。
- 复刻成功在媒体上发布作品时必须提及原作者,这对我很重要。
组装过程
参考上面哔哩哔哩视频
实物图



资料网盘链接:
因文件整合所用空间太大(已超过50MB),所以通过网盘链接的形式来分享资料。
我用夸克网盘给你分享了「【总资料】空心杯四轴飞行器V1.0」
链接:https://pan.quark.cn/s/ae7ca5032b94
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









