

适用于robocon的MP9931算力平台供电模块
简介
MP9931算力平台供电模块,推荐6s输入,固定19.5v输出,适用于robocon,robomaster等机器人比赛,用于给车上小主机供电
简介:MP9931算力平台供电模块,推荐6s输入,固定19.5v输出,适用于robocon,robomaster等机器人比赛,用于给车上小主机供电开源协议
:GPL 3.0
描述
MP9931供电模块
在机器人比赛中,我们往往会采用6S锂电池来给我们的机器人供电,但是我们的算力平台所要求的供电电压往往是19.5v或者是12v的电压,这时候就没办法采用锂电池直接给算力平台供电,就需要采用我们的大功率降压模块来作为解决方案。
参数与性能表现
额定输入电压:24V
输出电压:19.6V
额定电流:10A
最大效率:94.78%(@5.0A)
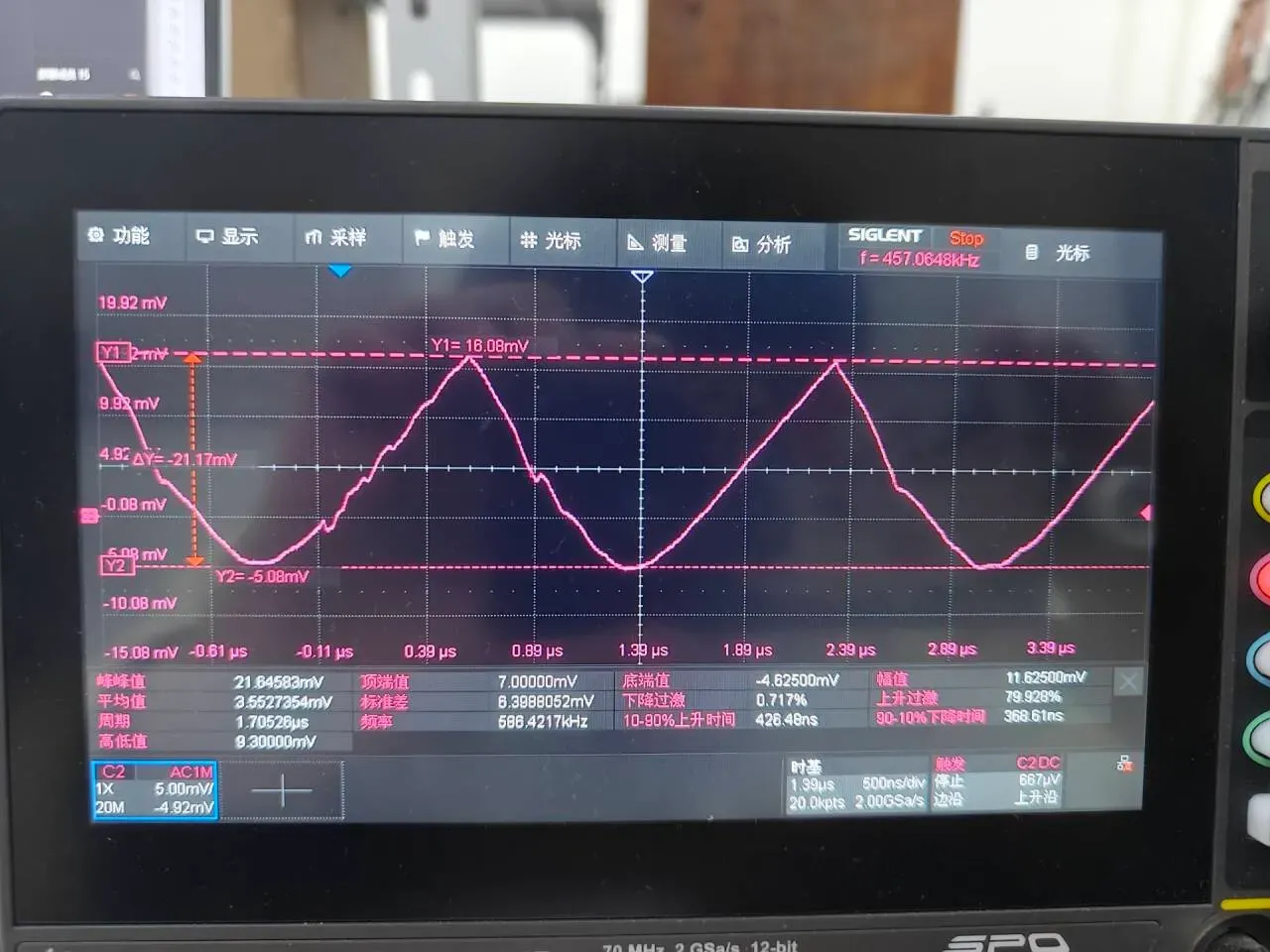
纹波大小:21mvpp
纹波波形图
关键元件选型
控制芯片
因为整体要求的功率比较大,所以肯定不能选择buck converter,而是buck controller,原本做过一个lm5145的版本,但是lm5145的外围元件比较多,加上需要做环路补偿,在设计上比较麻烦,看到了mps最新的mp9931,感觉在表现还有设计难度上都不错,故选择mp9931(还有一点是MPS芯片能白嫖)
电感
因为在设计的时候想着做小型化,需要选择小一点的电感,又要尽可能减小发热,所以只能拉大开关频率,所以最终的开关频率来到了600k,我是觉得这是一个没有必要的频率,完全可以降低到400k或者200k,但是目前来说600k使用起来也没什么问题,所以就没进行修改。
这边给出电感计算公式
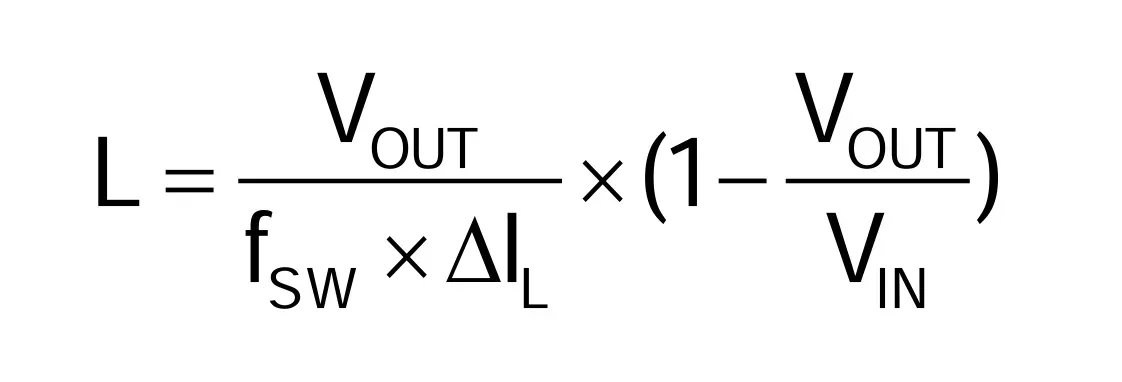
其中Fsw为开关频率600k,ΔI为r x Imax,其中r我取0.4,同时带入Vout,Vin 可得到电感为1.5uH。
mos管
因为考虑到比较大的电流需求,这边特地采用了两个mos管并联的设计,考虑到mos管的Qg和Ron,这边选用了CSD18537,同时对电源模块在无主动散热的情况下做了温升测试
5A输出条件下的上管长期工作温度
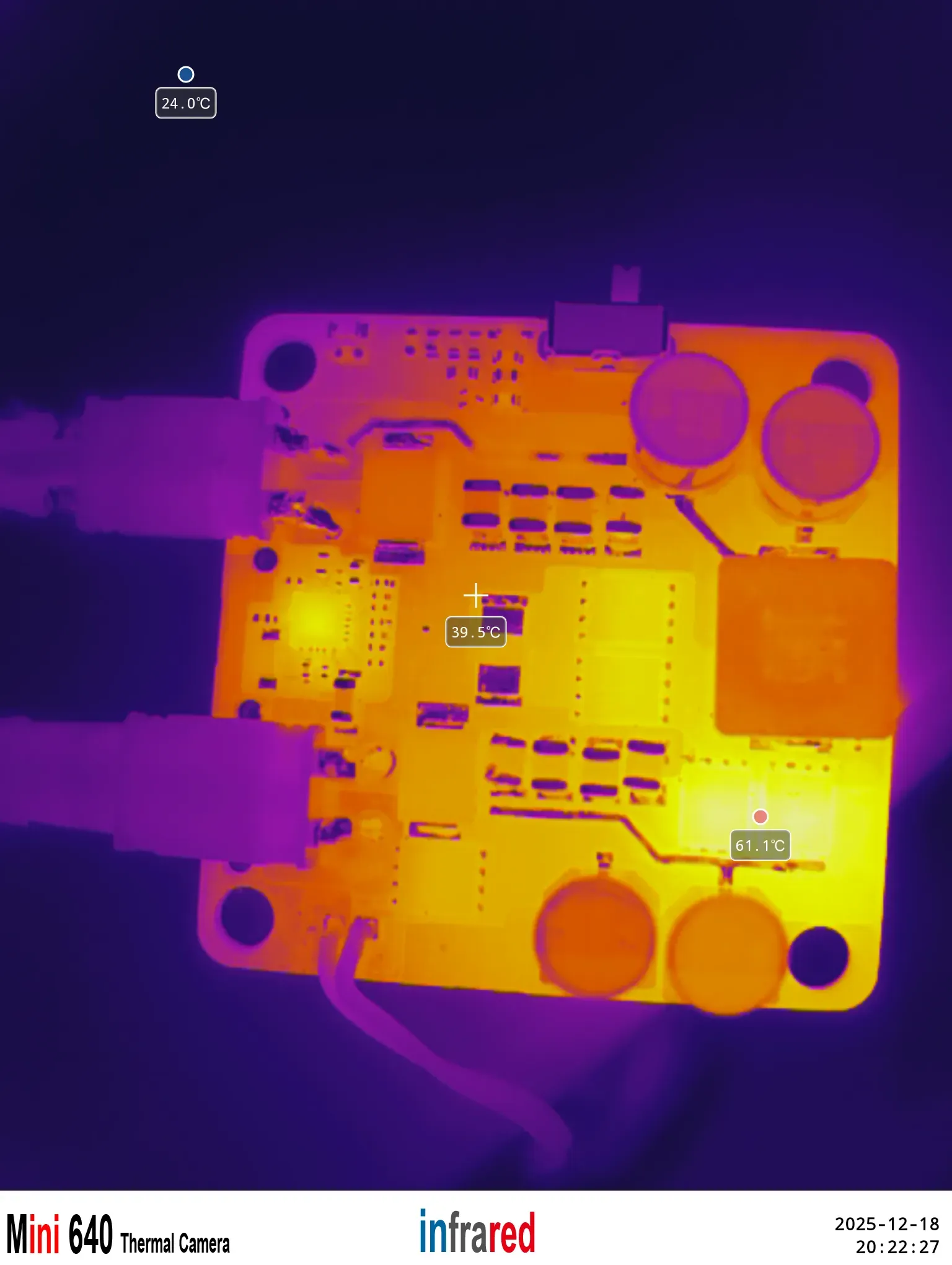
10A输出条件下的上管长期工作温度
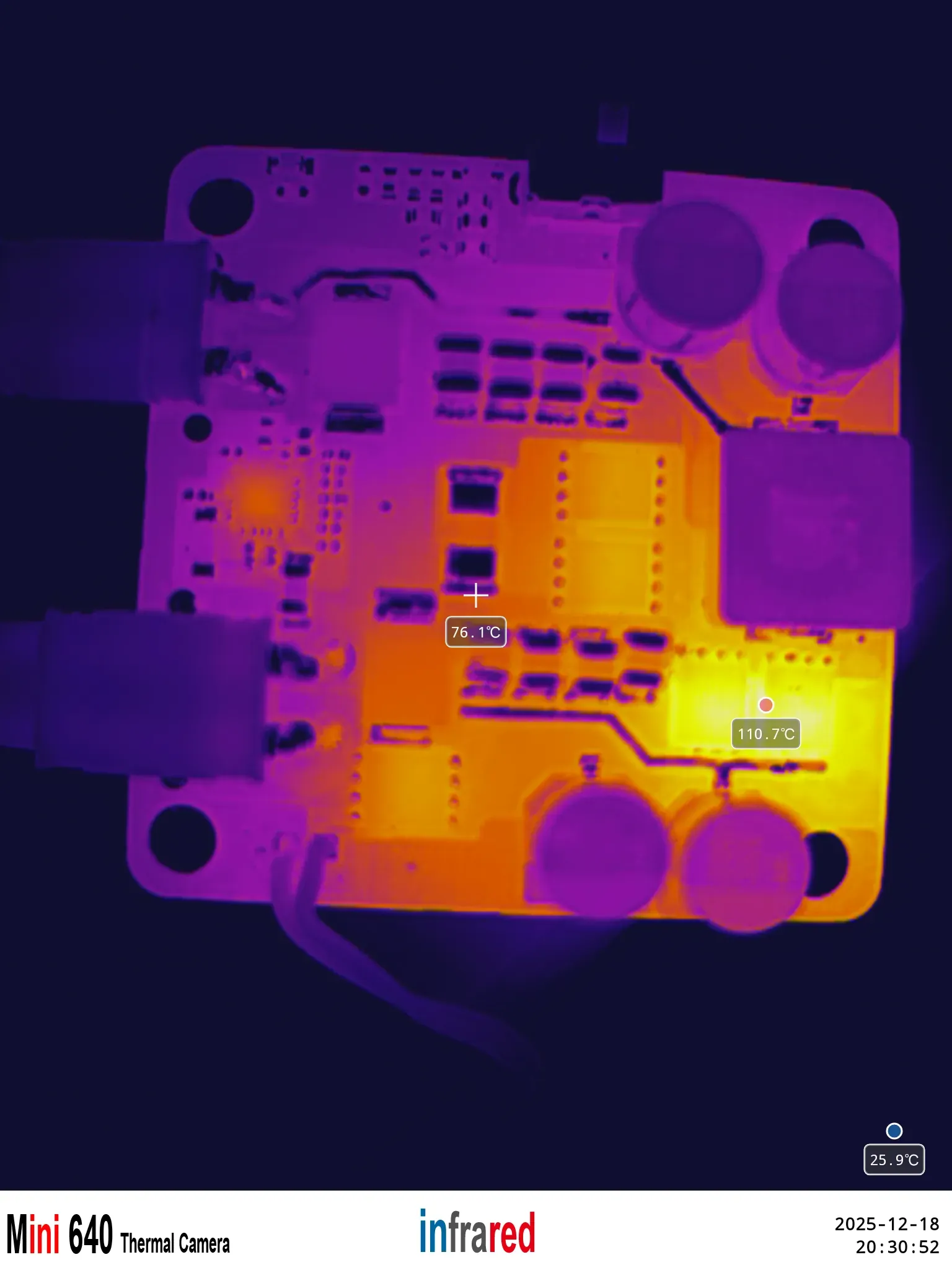
可以看到,因为输入输出电压相差比较小,电流在大部分时间从上管通过,主要热源也集中在上管,这边建议在复刻的时候去掉一个下管,改为一个下管并联一个肖特基二极管。
输出效率
这边对0-12A的各个电流输出大小进行了测试,整理数据后让AI生成了如下电流-效率曲线
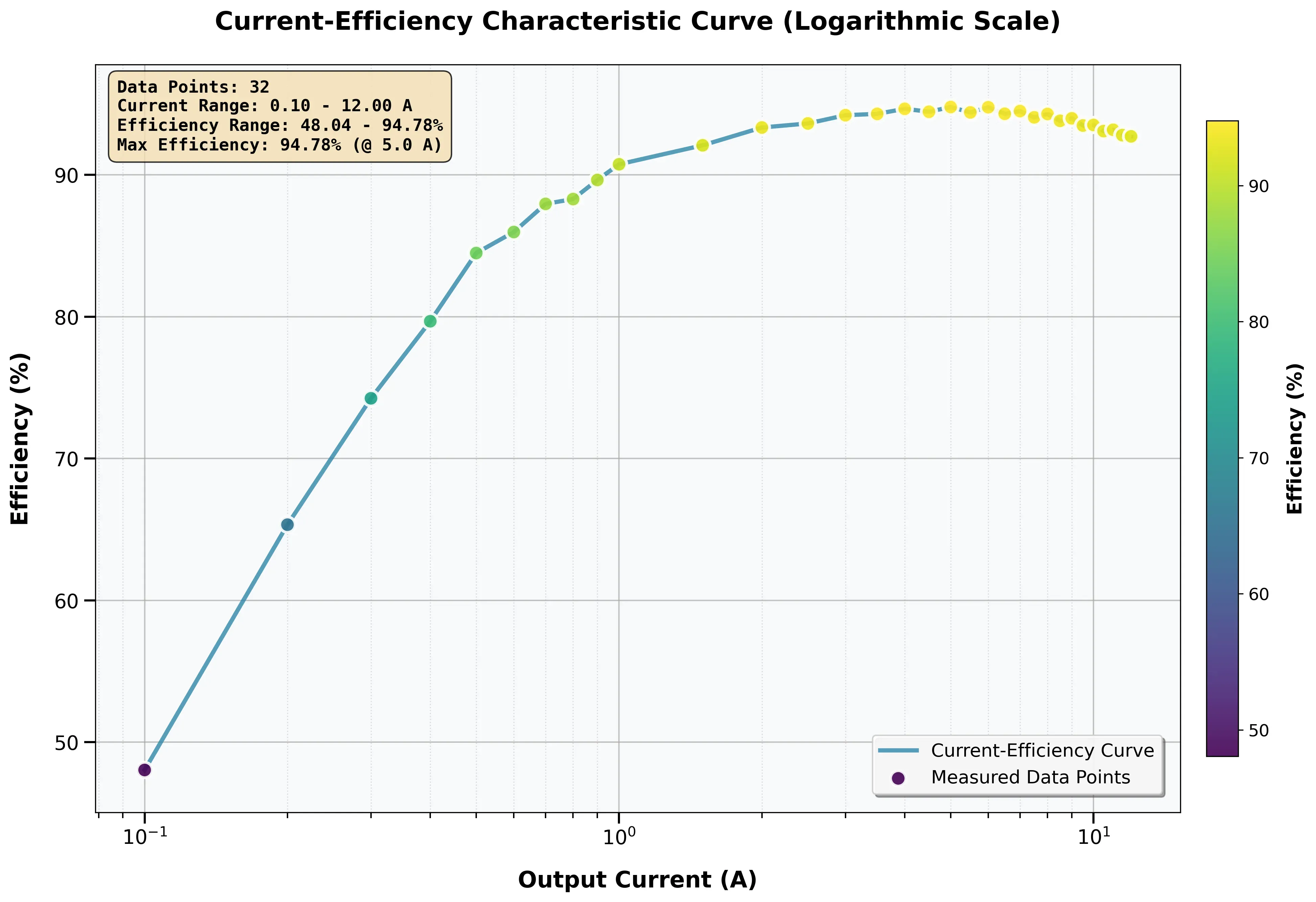
因为我个人的喜好还有实际工况,我在轻载模式下选择的是FCCM模式,所以导致轻载模式下的效率会比较低,在常见工况下能保持一个比较好的效率
电容
电容这边特地选择了性能较好的固态电容与1210封装的10uf MLCC做组合,并且MLCC采用了堆叠的形式,在每个电容上又多堆叠了一个电容(在原理图里面写着是堆叠三个,实际使用中堆叠两个表现也不错)。
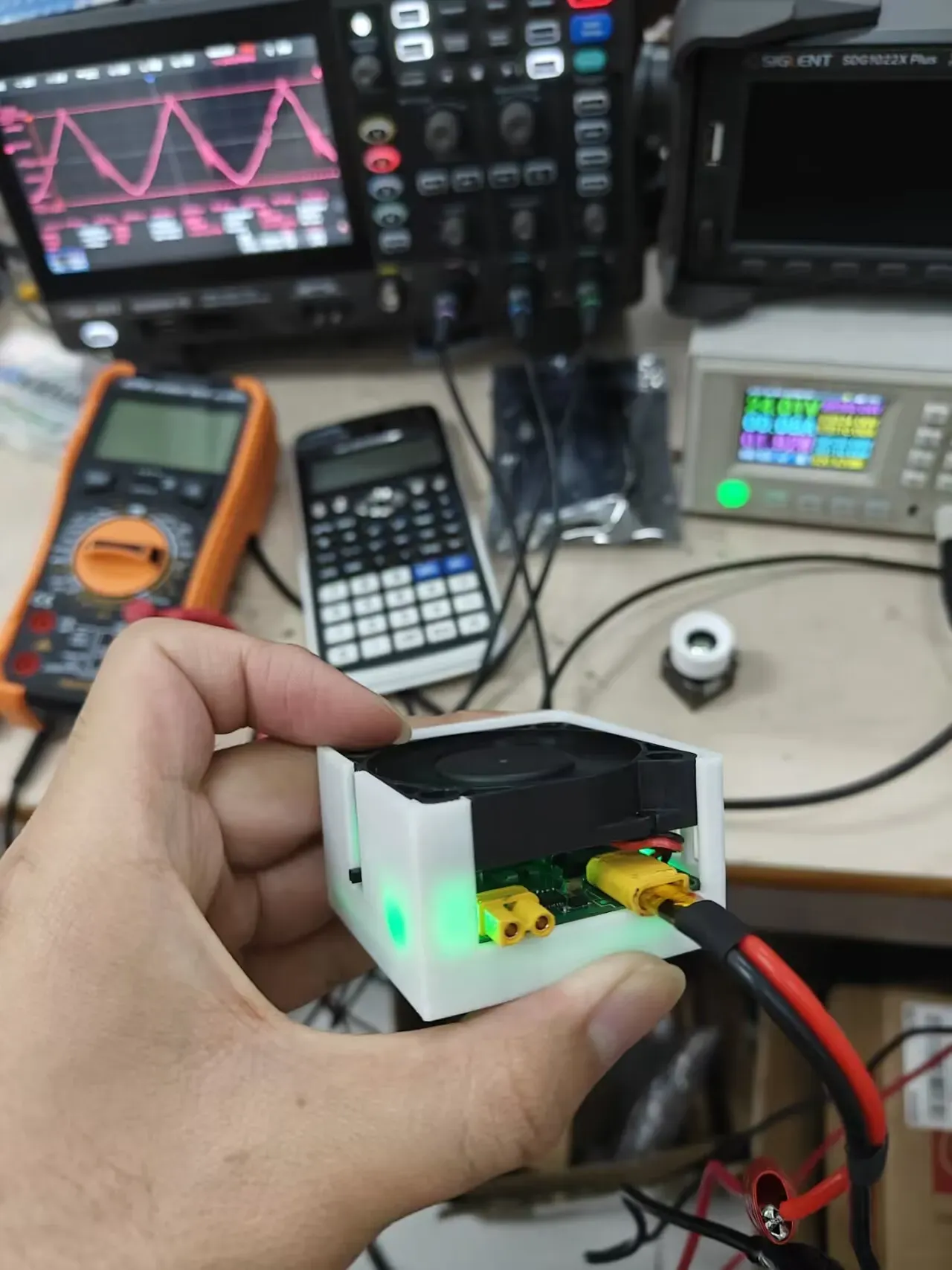
外壳装配
在设计的时候考虑到比赛处于夏天,温度比较高,所以加上了风扇,如下为有主动散热的时候,10A持续输出的温度表现,明显得到了很大的改善
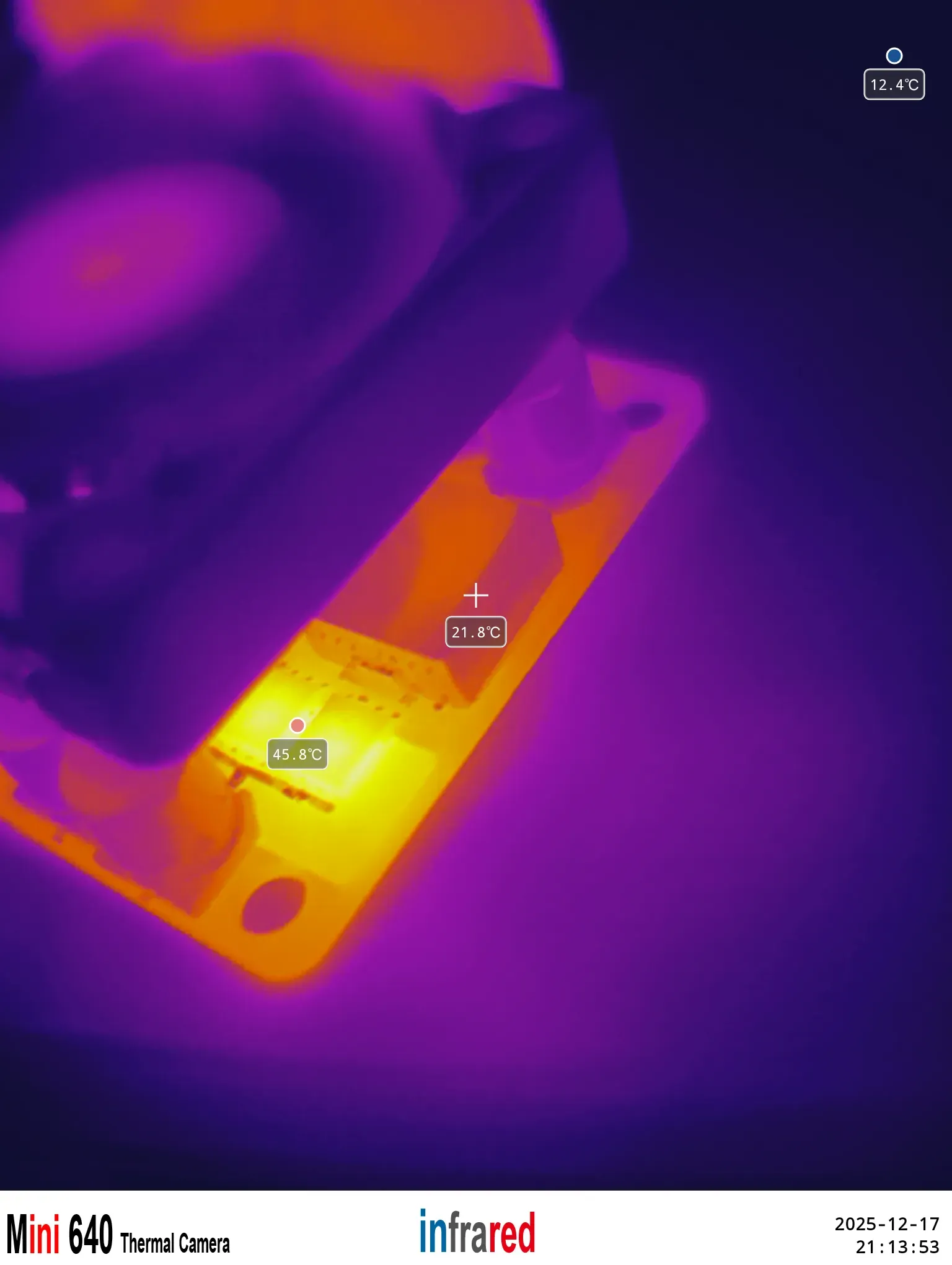
装配图

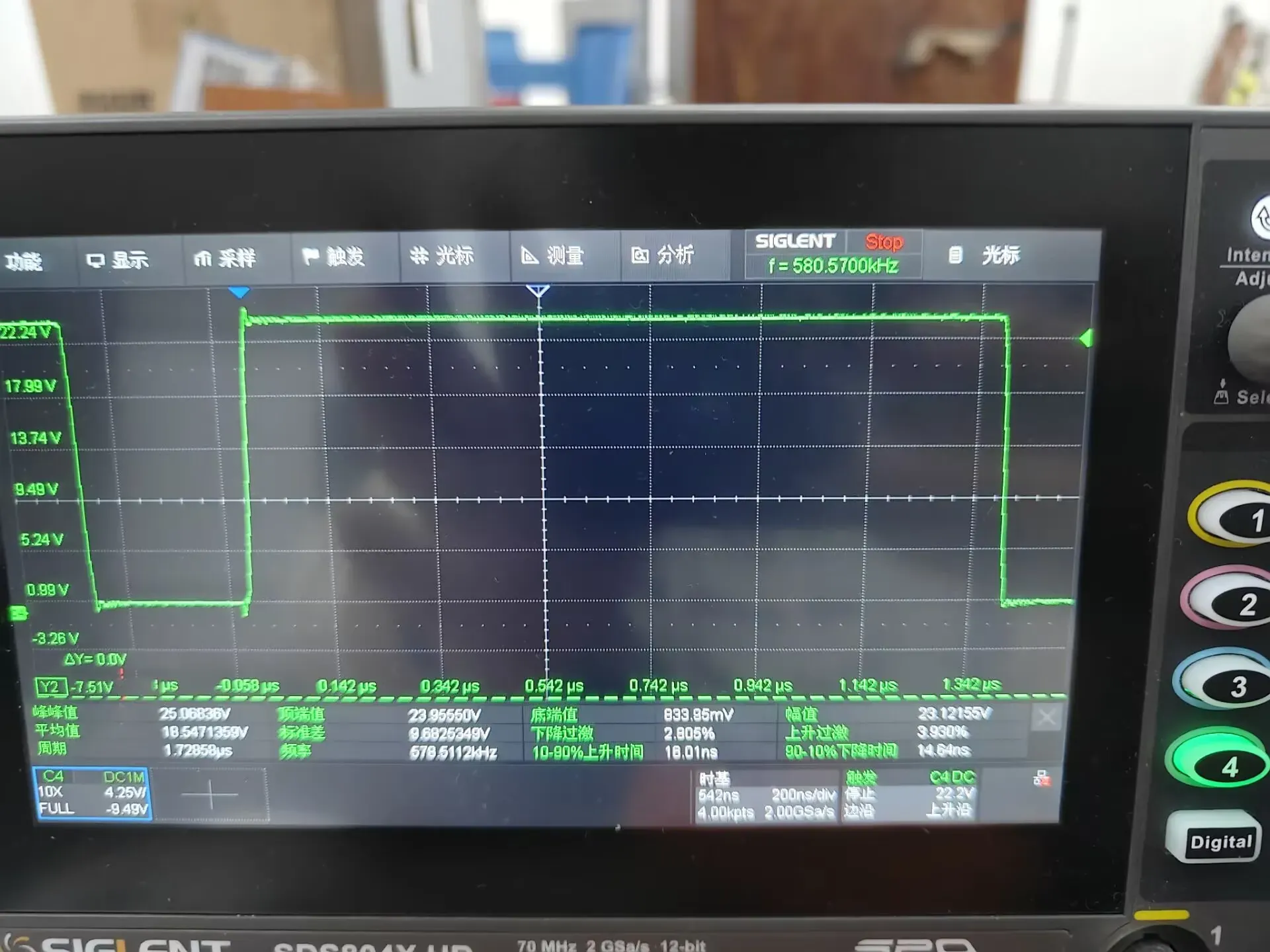
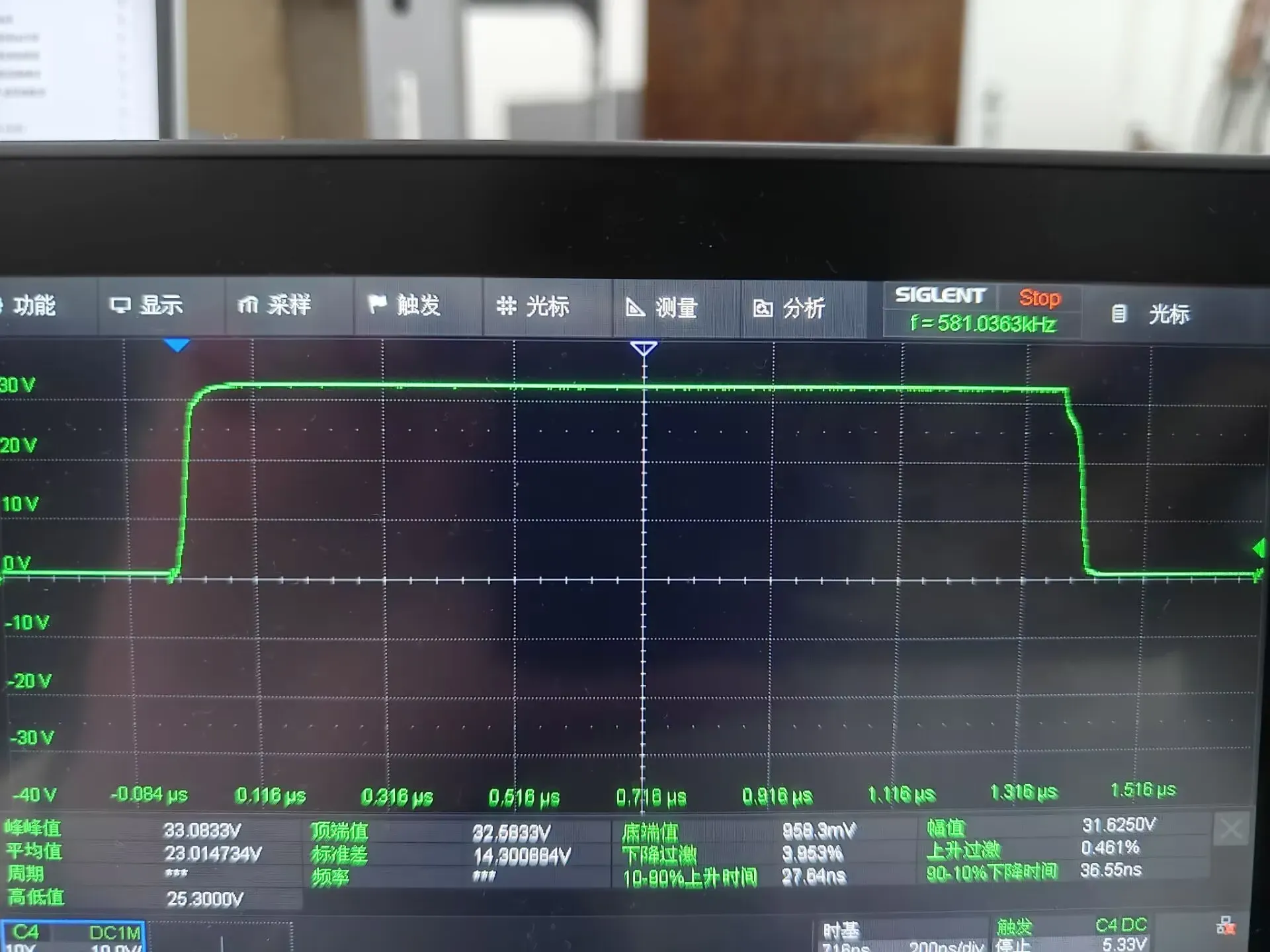
各个位置波形图
sw 上管 上管

缓启动开关参考: 华南理工大学RobotIC实验室 MP2980供电模块 [已验证]MP2980电脑供电模块 - 立创开源硬件平台
特别感谢
感谢MPS中国大学计划免费提供的芯片样品还有技术支持。
免费样品申请单: https://www.monolithicpower.cn/cn/support/mps-cn-university.html
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。
 暂无相关工程
暂无相关工程
评论