


Zeta拓扑DC-DC(含上位机)
简介
“Zeta拓扑电源变换器”项目的改进作品,重点优化了输出电压响应性能、散热性能,增加了上位机控制方式并具备远程操作能力。
简介:“Zeta拓扑电源变换器”项目的改进作品,重点优化了输出电压响应性能、散热性能,增加了上位机控制方式并具备远程操作能力。开源协议
:CC BY-NC-SA 4.0
(未经作者授权,禁止转载)描述
本项目由Chengyi Guo开源,请注意遵守开源协议。
前置项目:Zeta拓扑电源变换器
一、简介
本项目改进自上述前置项目,针对前置项目输出电压动态响应性能差的问题改进了环路控制方式。由原来的ADC采样--->数字PWM控制--->Zeta拓扑的控制环路改为误差放大(Type-Ⅲ补偿)--->模拟PWM控制---Zeta拓扑的控制环路,极大提升了输出响应性能同时增加了手动校准功能将输出电压误差控制在±0.1V以内满足一般精度要求。此外,本项目还增加了上位机控制台,基于串口通信配合蓝牙串口以及WIFI串口模块等可以实现无线控制乃至远程控制,操作更加便捷且板载屏幕也不再是必须。本项目也在PCB设计上增强了散热能力,并预留散热风扇控制接口,彻底解决连续运行过热问题。
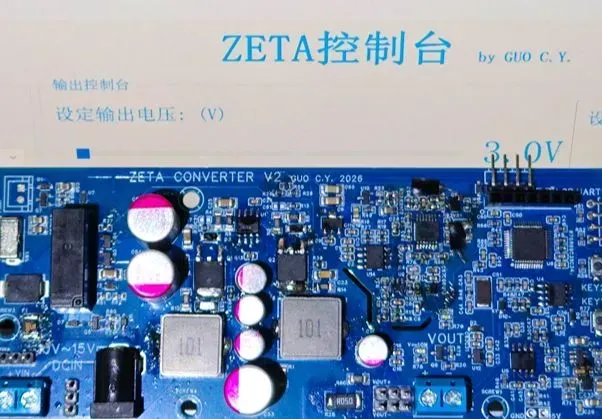
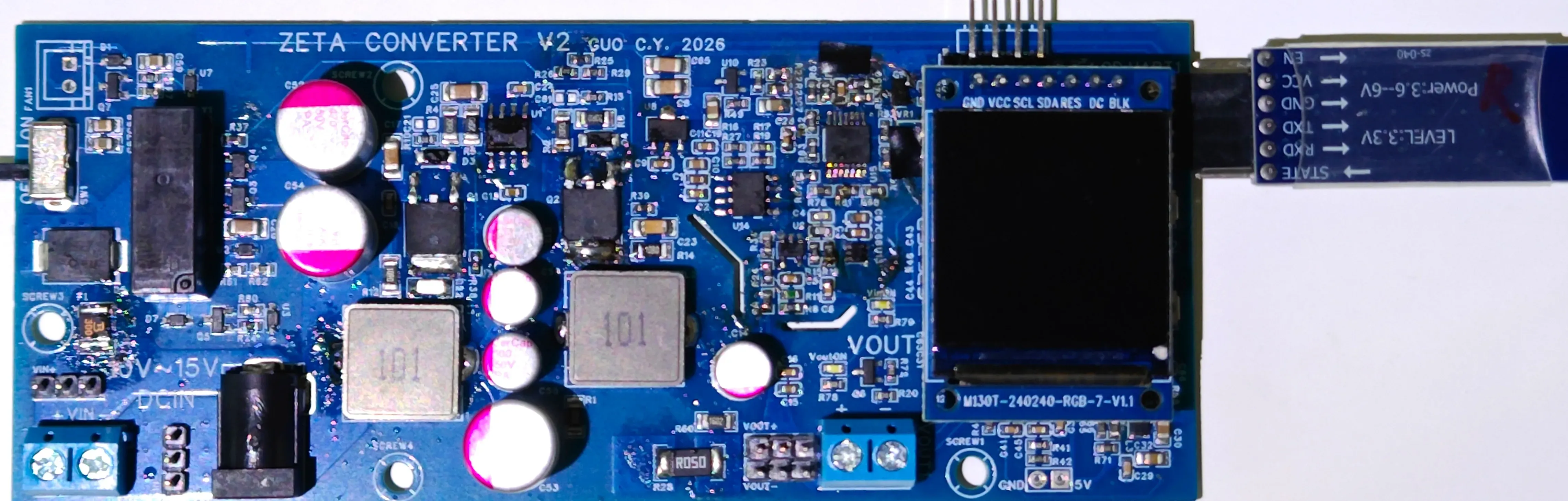
整机实物与上位机控制台截图如下。

二、工作原理
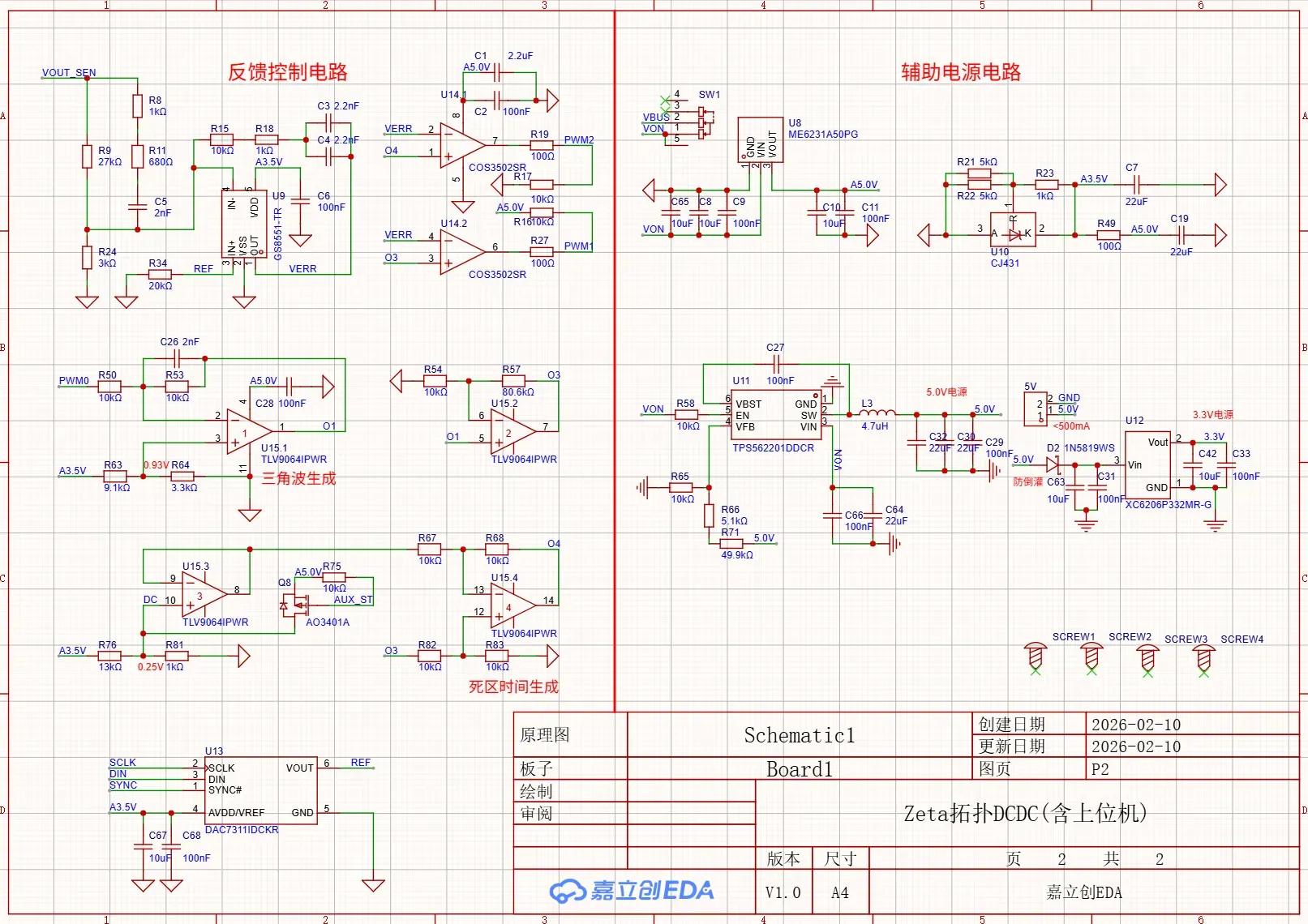
项目电路图如下:
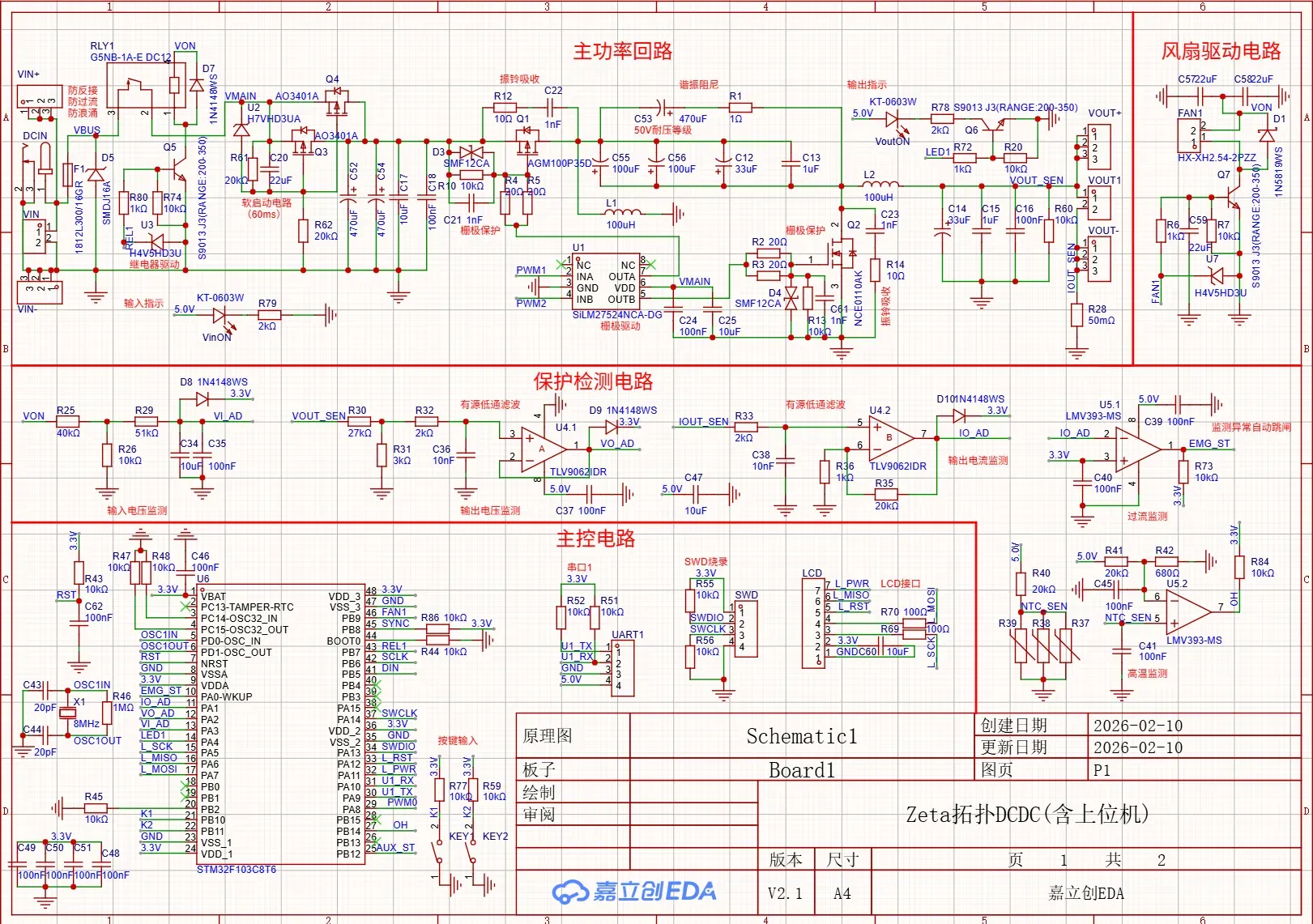
其中主功率回路、保护检测电路、主控电路在前置项目中已经进行了详细介绍,此处不再赘述。
风扇驱动电路使用S9013三极管驱动,电阻R6与电容C59构成简单的RC滤波电路对MCU输出的PWM信号进行低通滤波,此时S9013工作于线性区适合于直流调速风扇。但需要注意风扇工作电流不能过大,否则S9013将发热严重。也可以去除电容C59,此时S9013工作于开关模式适合于支持PWM调速风扇的驱动。二极管D1用于给风扇线圈续流,TVS管U7用于预防异常尖峰电压进入MCU。
辅助电源电路用于待机供电,其中U11为同步BUCK芯片实现输入电压转数字5V,U12为LDO实现数字5V转3.3V主要用于MCU、LCD等数字器件供电。U8为LDO实现输入电压转模拟5V用于运放、比较器等模拟器件供电。U10为精密基准源实现模拟5V转精密3.5V主要用作DAC芯片U13供电。
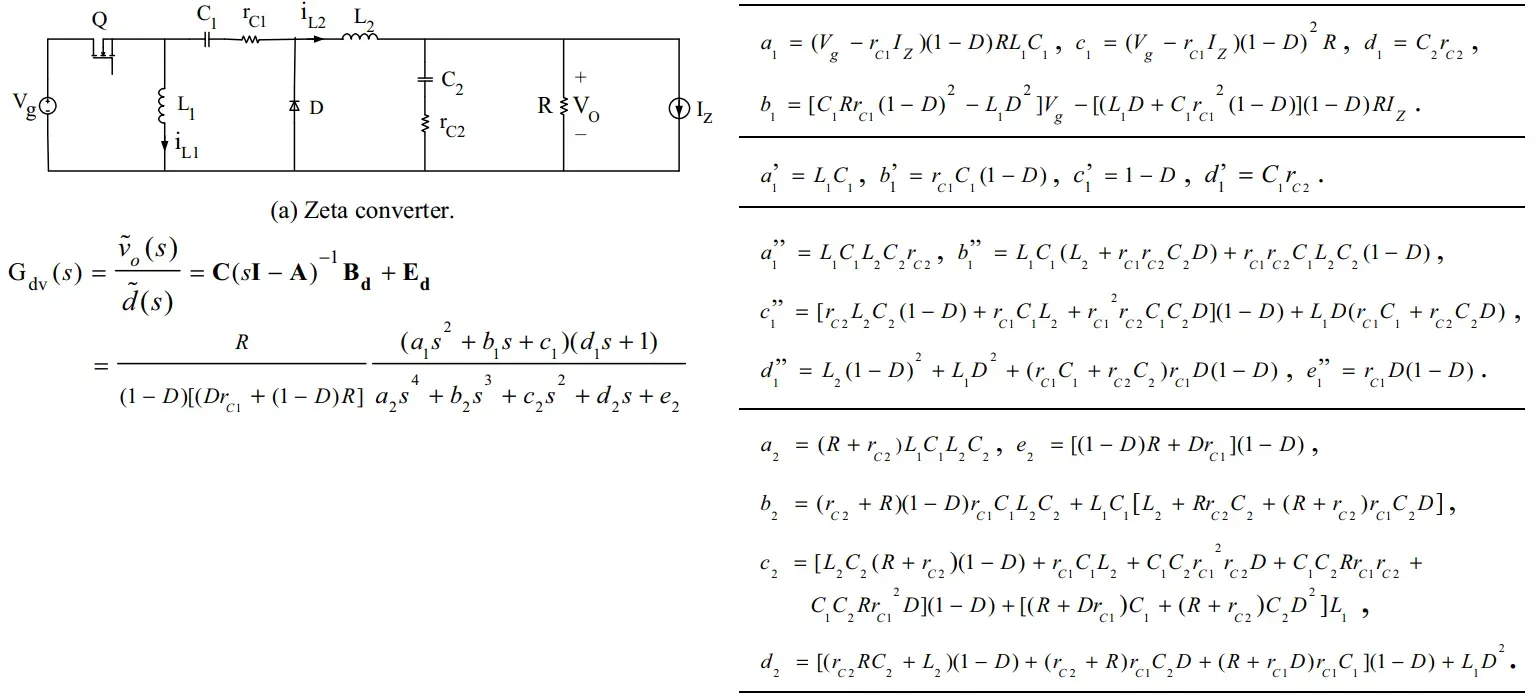
反馈控制电路中R8、R9、R11、C5、R24、R15、R18、C3、C4、精密运放U9共同构成带三型补偿的误差放大器用于捕捉实际输出电压与参考电压的偏差并放大后作为反馈调节量。补偿器设计需要考虑被补偿对象的相位裕量情况,此处为Zeta拓扑并采用电压反馈,占空比-输出电压Gdv由下式给出:(引自Dynamic modeling of a zeta converter with state-space averaging technique)
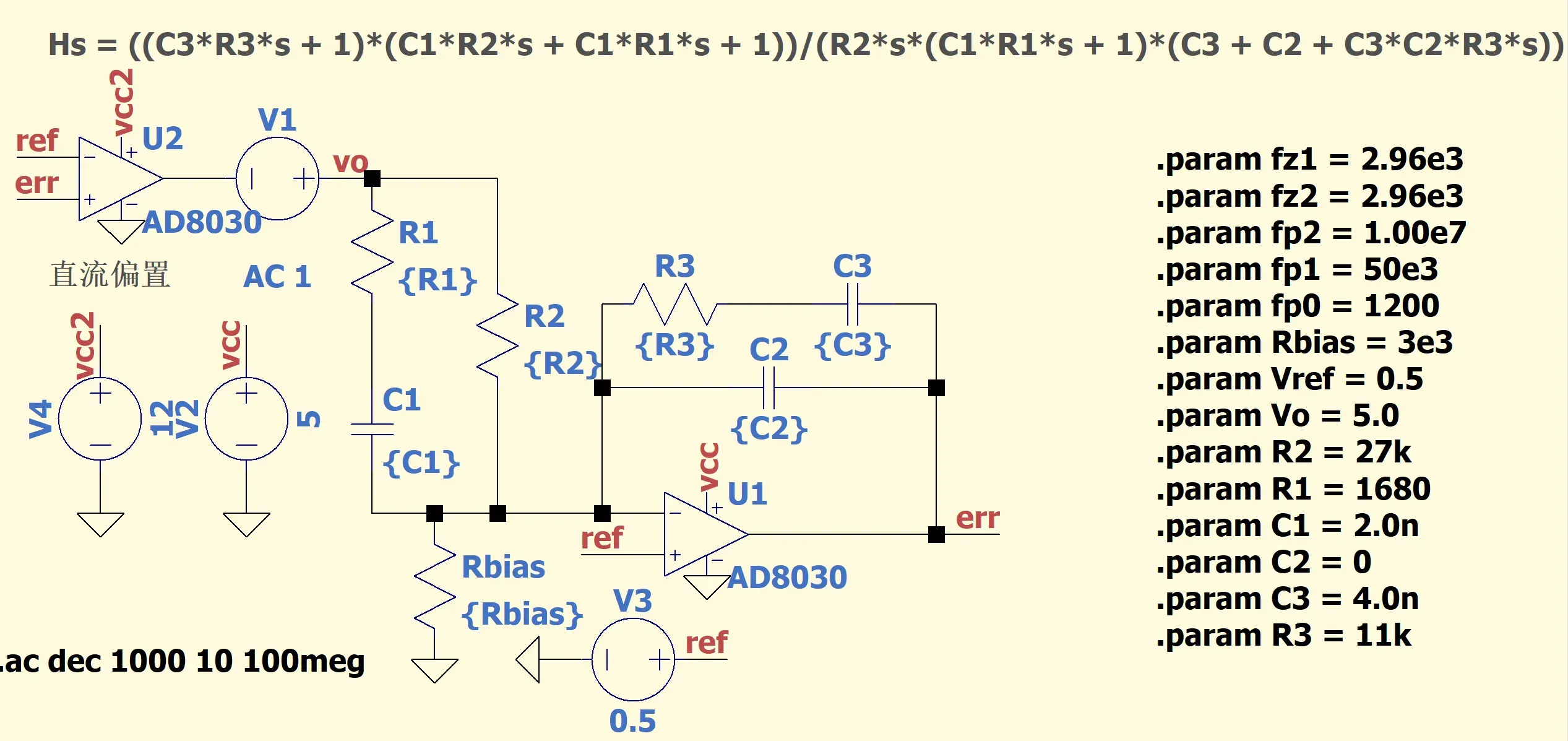
使用Type-Ⅲ补偿器进行环路补偿,Type-Ⅲ补偿器频率响应由下式给出:
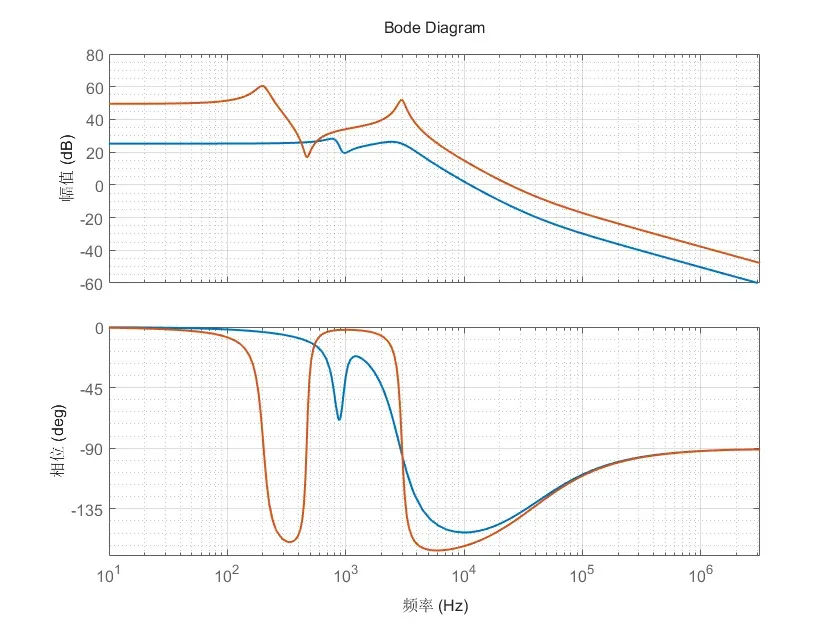
本项目设置误差-占空比Ks=1/3.72,以输出电压3V-28V,输出功率小于等于24W进行扫描,Matlab仿真结果如下(Matlab代码已开源,详见附件)。
未补偿Zeta拓扑Gdv响应曲线(任取两条):
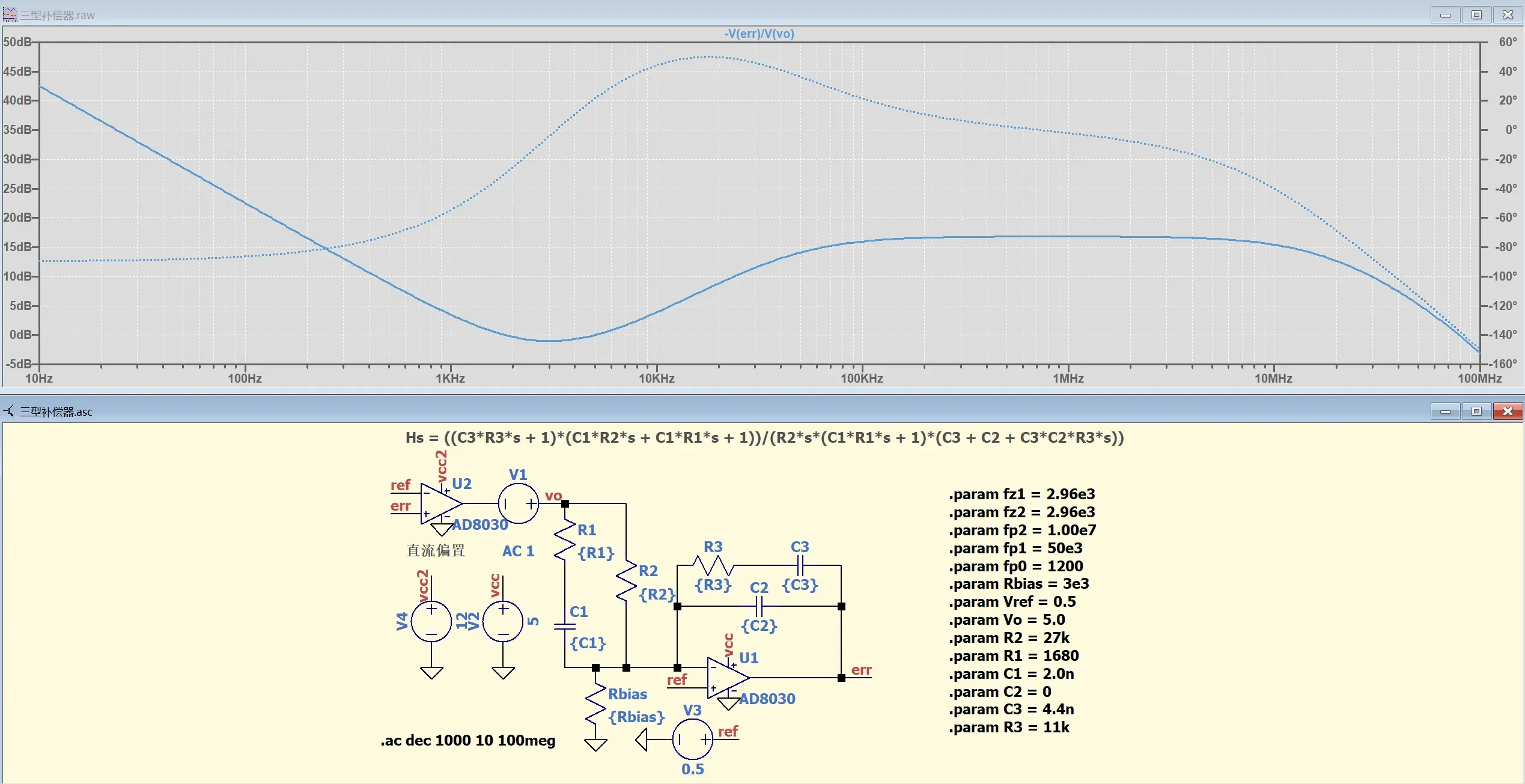
设置两个零点位置2.96KHz,三个极点位置分别为1.2KHz、50KHz、10MHz,最大穿越频率约在20KHz处(开关频率100kHz)追求较好的动态响应性能,直流增益最大约80dB。Type-Ⅲ补偿器频率响应Hs如下:
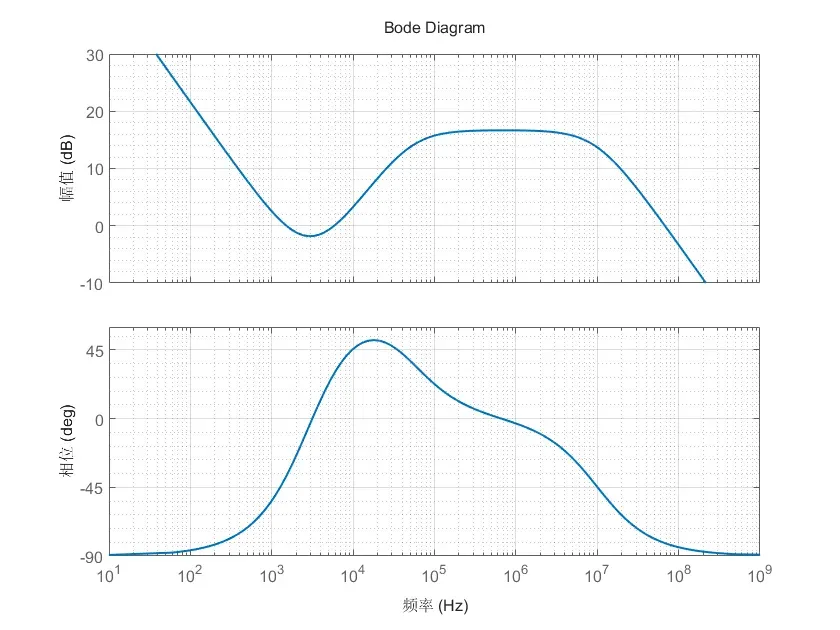
补偿后Gdv*Hs*Ks频率响应曲线如下:
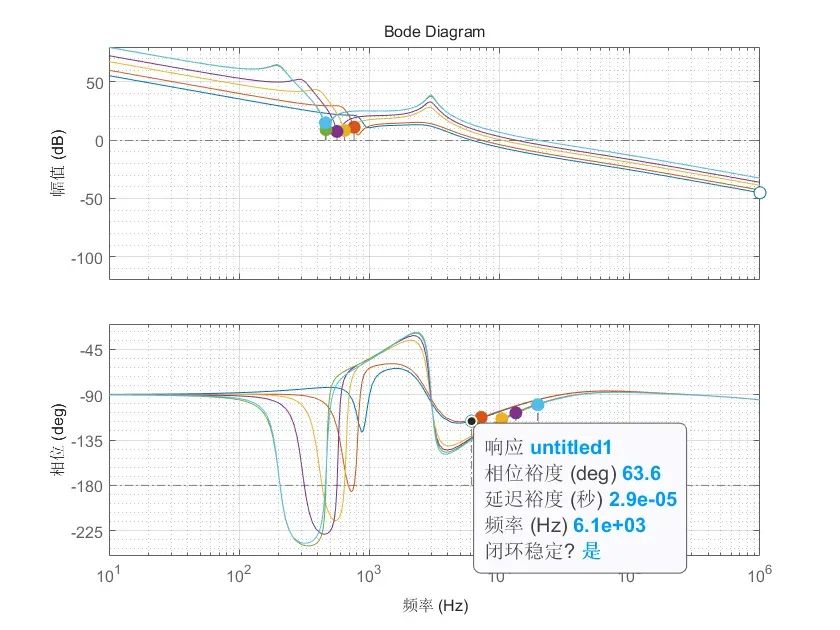
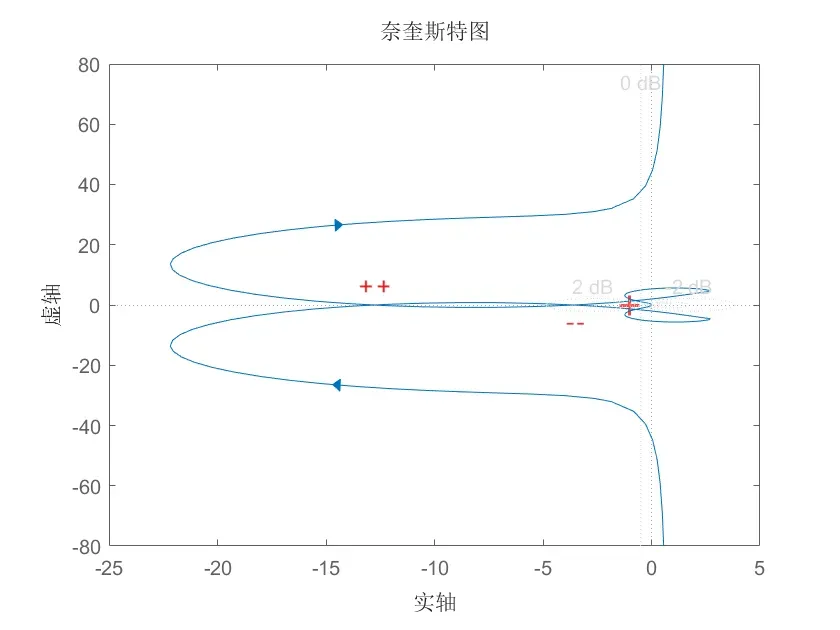
由上图可知增益曲线穿越一次0dB线,相位曲线在穿越频率前偶数次穿越180°线,环路稳定。任取其中一条曲线对应参数设置绘制奈奎斯特图如下,由奈奎斯特图同样可知环路稳定。
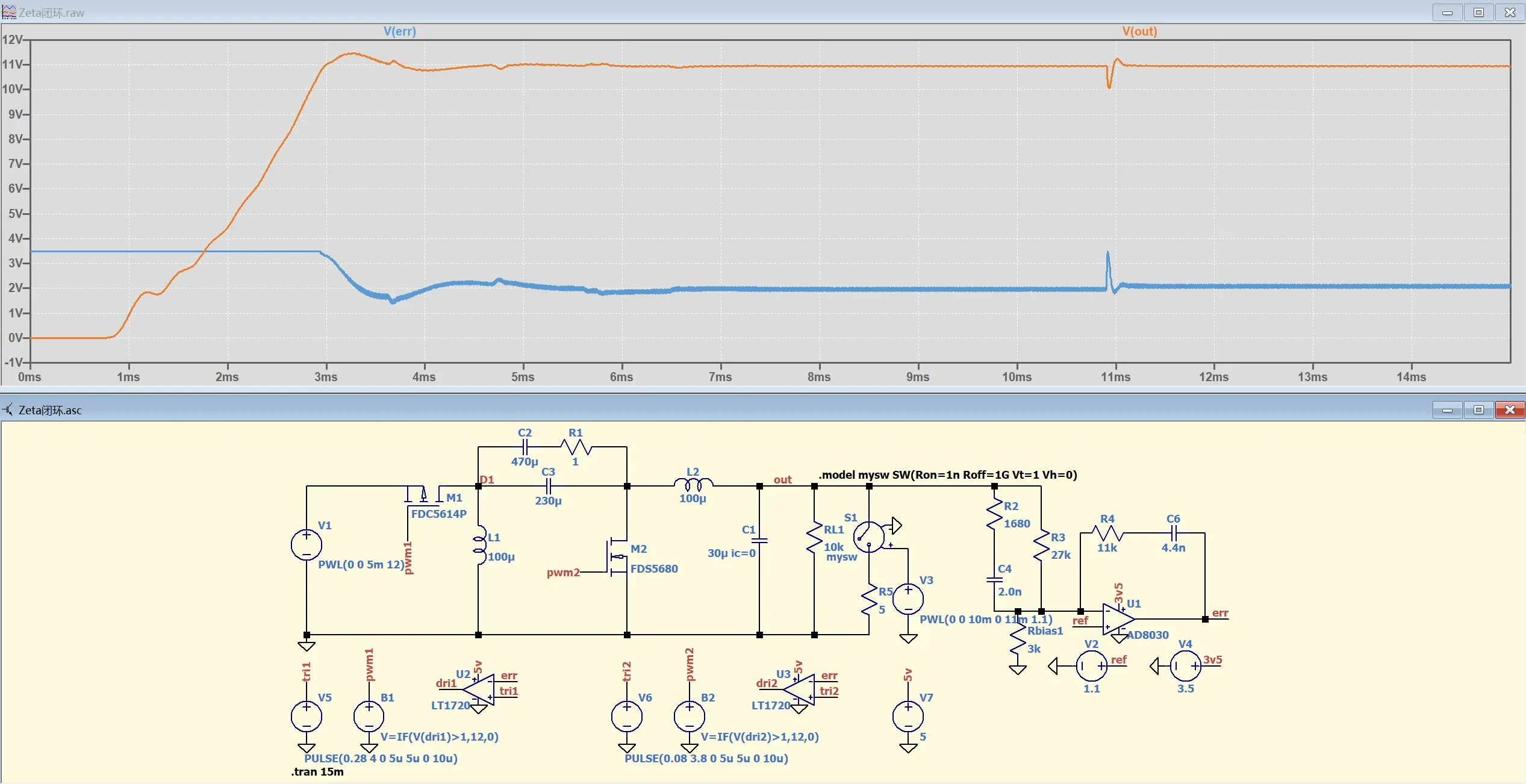
将Matlab计算所得Type-Ⅲ补偿器参数就近取标准值后带入LTspice使用实际电路进行仿真验证如下,与Matlab所得结果一致。
LTspice闭环仿真如下(11ms处负载切换),上述所有LTspice仿真文件已开源,详见附件。
至此,误差放大环节设计完毕,接下来进一步设计模拟PWM控制环节实现将误差反馈量变为PWM控制信号。
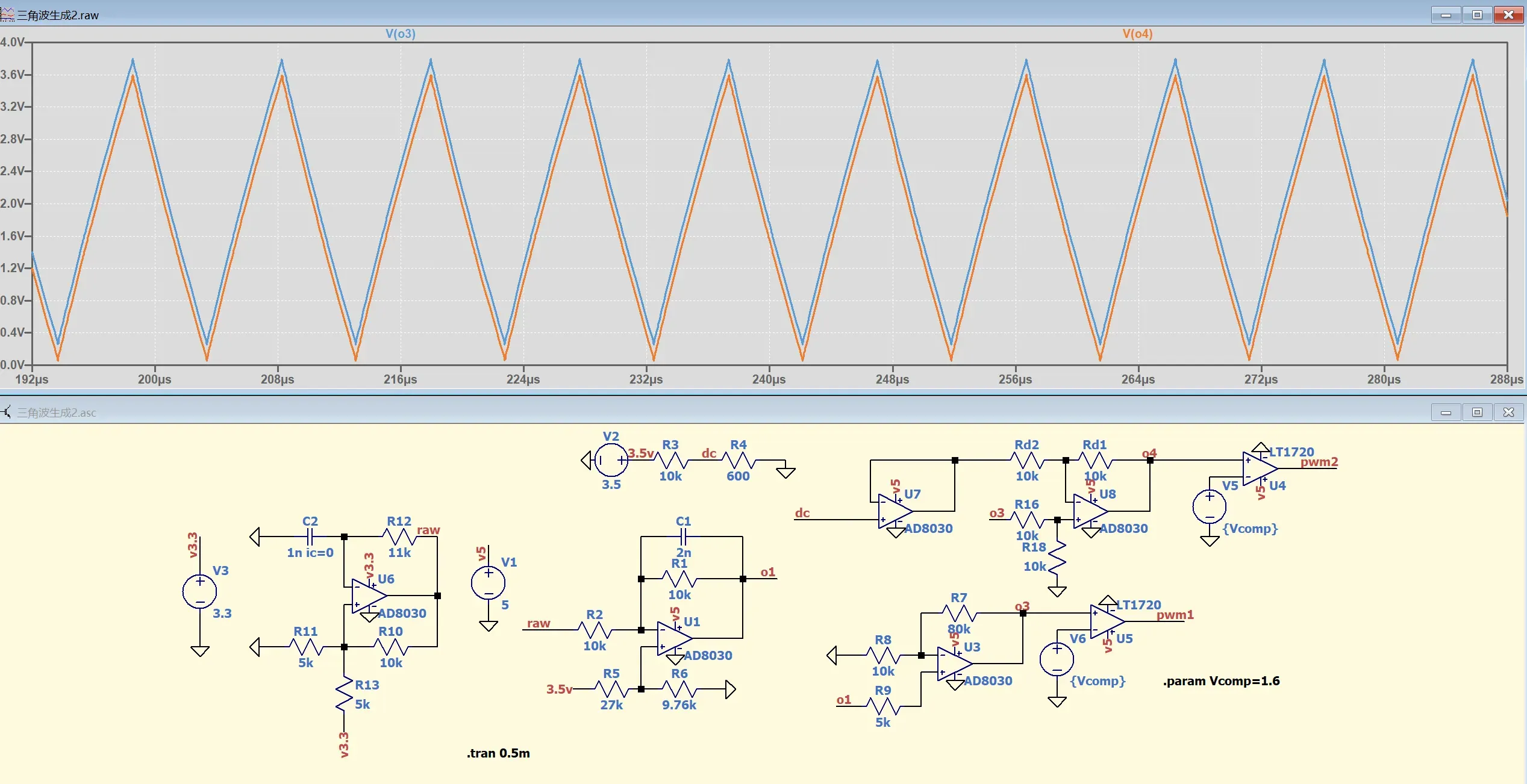
R50、R53、R63、R64、C26、运放U15.1构成积分器,由U6(STM32F103C8T6)生成的100KHz方波(50%占空比)经R50耦合进入积分器输出为三角波,调节R63与R64比例来调整输出三角波幅值。R54、R57、运放U15.2构成同相比例放大器放大上述三角波作为一路输出O3。R76、R81所得直流分压经过运放U15.3缓冲后送入由U15.4与R67、R68、R82、R83构成的差动比例运算电路,上述O3输出与该直流分量相减得到O4输出。由此,O4输出即为O3输出向下少许平移后的结果,后续经过比较输出后两路信号的幅值差异将转换为占空比差异也即死区时间的生成,调节R76、R81的比例关系可以改变该死区时间大小。PMOS管Q8用于下管刹车,AUX_ST接入MCU开漏输出管脚,正常情况下Q8栅极被上拉,Q8关断;当AUX_ST拉低时Q8导通,O4输出低电平,下管(N管)关断。对于上管刹车,控制MCU输出方波变为输出持续的低电平则O3输出为高电平,上管(P管)关断。O3、O4输出波形LTspice仿真如下(仿真文件已开源,详见附件)。
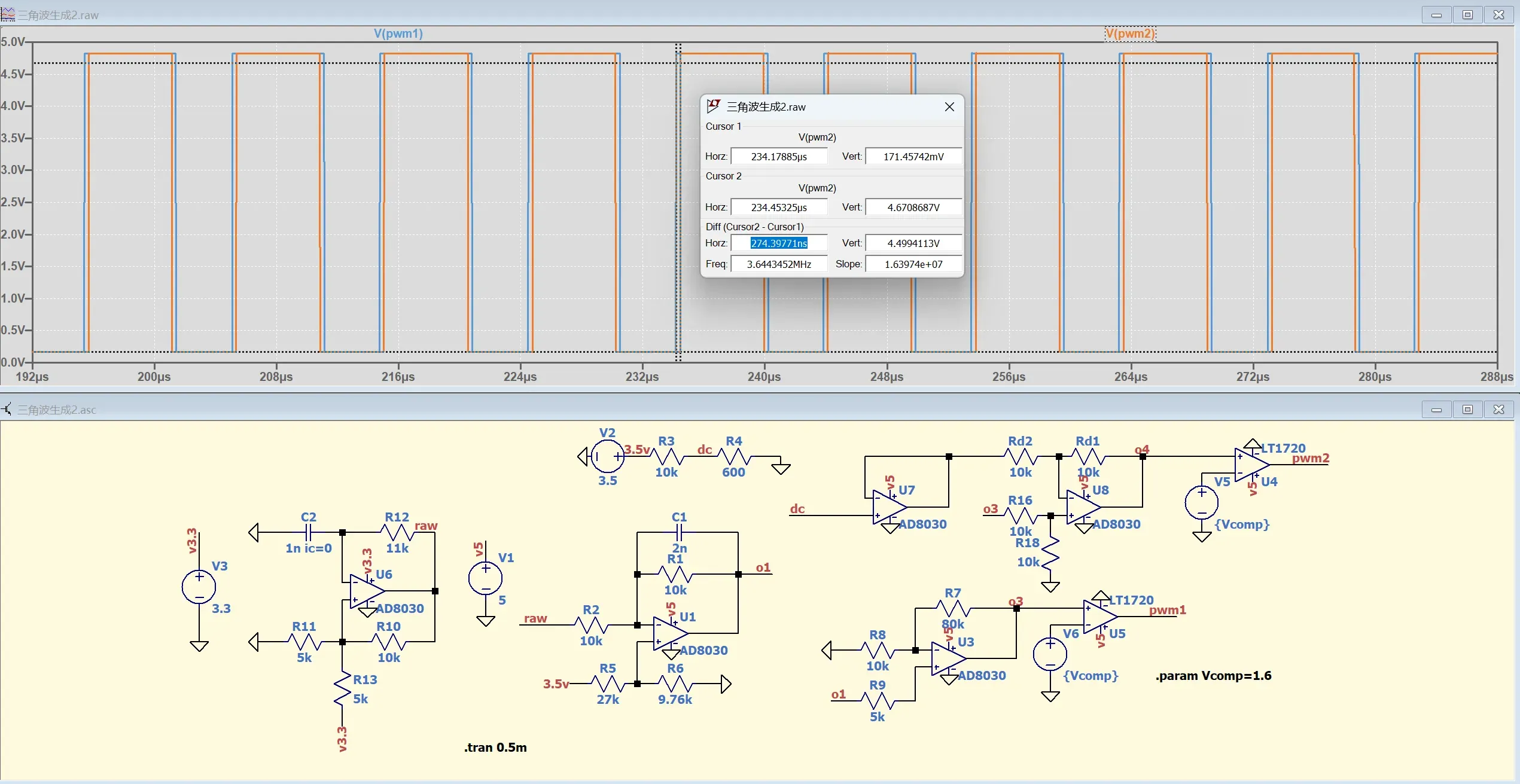
U14.1与U14.2为高速比较器,将误差放大器输出量与三角波O4、O3分别进行比较实现误差反馈量线性地转换为占空比变化量,输出占空比信号PWM2、PWM1,LTspice仿真结果如下(仿真文件已开源,详见附件)。
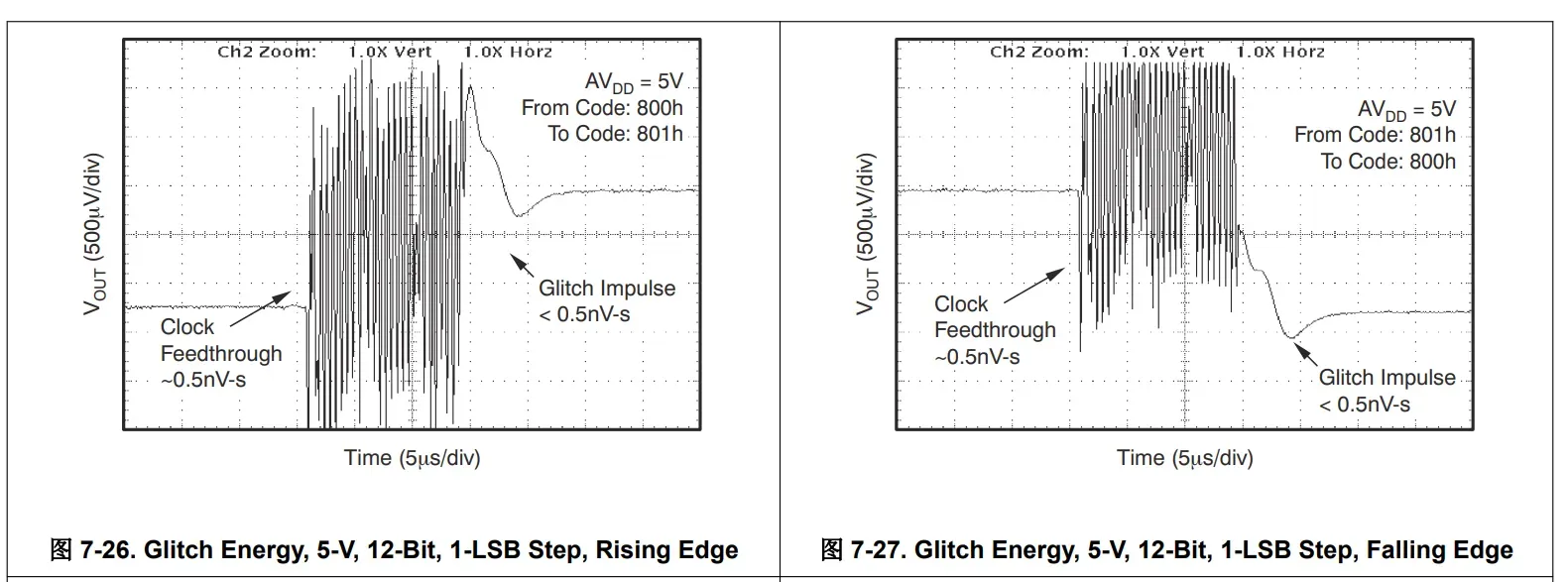
误差放大环节中,参考电压由U13(DAC7311)与MCU通信后产生,需要特别注意DAC7311在输出变化时存在不稳定时间(如下图所示),因此务必在DAC7311输出稳定后才能打开上下MOS管否则输出电压不可控。
三、PCB设计
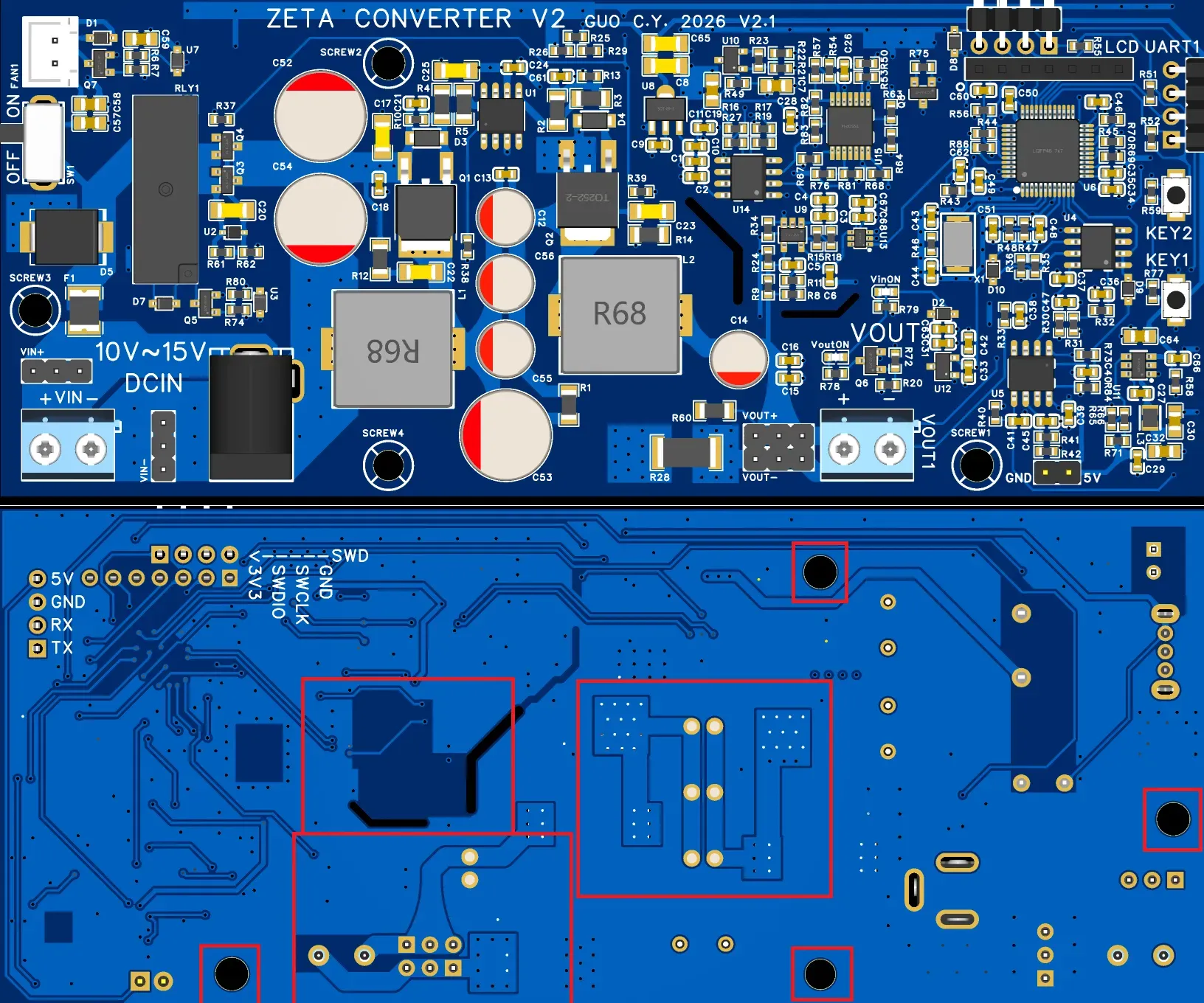
本项目PCB设计主要基于前置项目PCB方案进行改进,主要针对上下管走线以及散热焊盘采用正反双面走线和铺铜并通过大量过孔连接,一方面增大走线截面积而减小温升另一方面通过过孔将热量传导至PCB背面。对于本项目新增加的误差放大补偿电路部分则靠近输出采样位置放置并通过PCB割槽、挖地处理等进行分隔,一方面缩短反馈走线长度另一方面减小开关噪声的干扰。此外,本次在PCB上还新增了4处螺丝孔方便固定安装。
四、使用操作
上位机使用python基于pyQt5设计,打开软件后所有操作自“打开串口”开始,“关闭串口”结束。打开串口后若下位机已启动则自动按照通信协议进行连接(通信协议详见附件),此时可以看到下位机的工作状态。在期望输出电压处拖动滑条设置输出电压,定时设置处设置定时时间。点击“启动输出”按钮,下位机即开始输出电压,上位机面板可以查看输出电压、电流、功率等情况。点击“停止输出”按钮或是定时时间到则下位机停止输出。
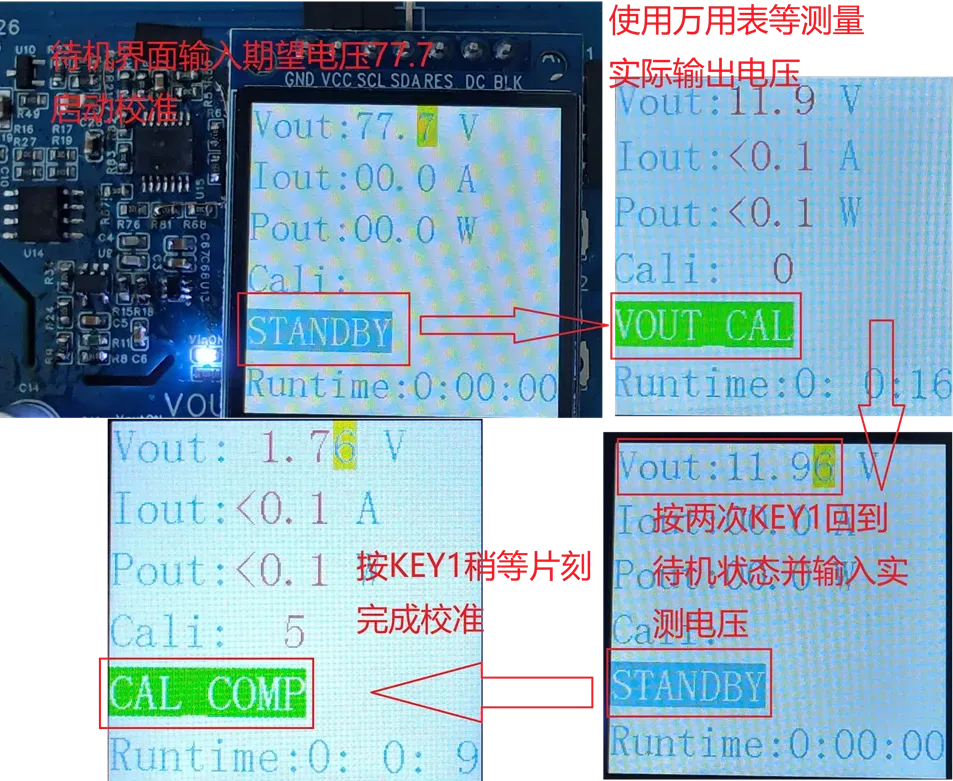
由于本项目采用模拟反馈控制,受限于电阻精度、基准源精度等输出电压可能存在固定偏移,该偏移带来的输出电压误差可能通过手动校准来消除。点击“校准”按钮,下位机即开始输出12V电压,使用万用表等工具测量下位机实际输出电压并在上位机“实测输出电压”滑条处输入实测电压后再点击“继续校准”按钮,等待提示校准成功后即完成校准。
需要注意在上位机操作时,下位机液晶屏右下角显示“R”字样此时下位机按钮不可用。若仅通过上位机操作,则下位机屏幕可以不必安装。上位机操作日志可以在软件所在目录Log文件夹内查询。

不借助上位机,仅在下位机上操作完成校准过程可以参考下图。
五、实测结果
1、接入50欧姆纯电阻负载,电压输出精度测试结果如下

2、12V输出,50欧姆纯电阻负载下O3(黄色)、O4(绿色)波形,实测R63与R64分压节点电压0.9158V。
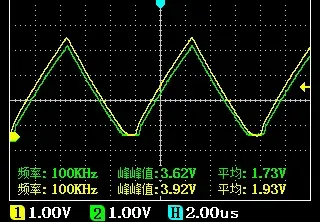
如上图所示,三角波稍有削底但在最大最小占空比范围外,不影响正常工作。
3、12V输出,50欧姆纯电阻负载下上管(黄色)、下管(绿色)栅极波形,死区时间约为240ns对应R76与R81分压节点电压0.2378V.
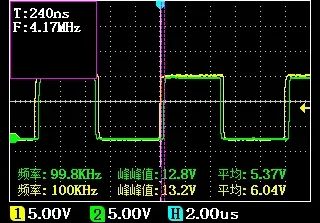
如上图所示,上下管开启和关断的死区时间稍有差异,这主要由运放相位延迟带来并且不影响正常工作。
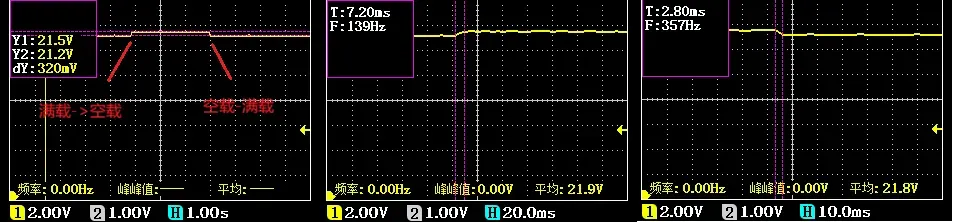
4、21.8V输出20欧姆纯电阻负载,负载切换动态响应如下图所示,电压摆幅约320mV,满载-空载响应时间约7.2ms,空载-满载响应时间约2.8ms,动态响应性能相比V1版得到巨大提升。
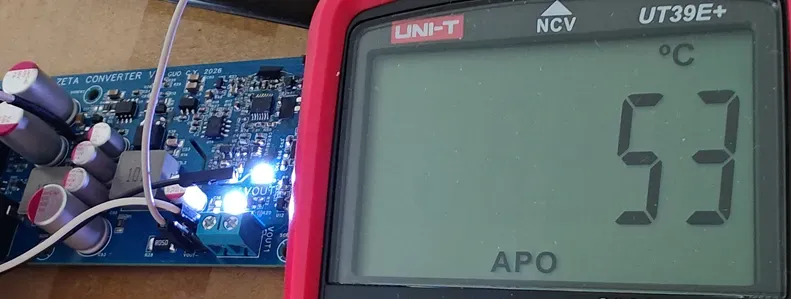
5、21.8V输出20欧姆纯电阻负载,室温26度连续运行15分钟,热点为上管温度最高为53度远低于V1版85度。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









