



专业版
YDIFLY——蝴蝶扑翼机飞控主控板开源
3.1w
0
0
19
简介
YDIFLY扑翼飞行器控制板。本项目将开源所有硬件、软件、结构,且附带手把手教程,希望能创建一个良好的交流环境,将机器人性能发挥到极致。本项目的诞生也得益于现如今丰富的开源环境,感谢各位大佬开源。
简介:YDIFLY扑翼飞行器控制板。本项目将开源所有硬件、软件、结构,且附带手把手教程,希望能创建一个良好的交流环境,将机器人性能发挥到极致。本项目的诞生也得益于现如今丰富的开源环境,感谢各位大佬开源。开源协议
:GPL 3.0
创建时间:2025-08-16 23:52:21更新时间:2026-05-11 11:21:06
描述
无痛焊接,一键采购链接:蝴蝶扑翼主控板采购淘宝采购链接
ELRS遥控(带屏幕显示),一键采购链接:ELRS遥控采购链接
手把手视频教程:一点创绘B站视频教程
文字版教程:Arduino IDE安装教程
一、概述和设计理念 (Overview & Philosophy)

YDIFLY诞生于对天空的向往和对开源精神的致敬,我们致力于为扑翼飞行器爱好者和研究者打造一款性能强悍、具有高稳定性、完全开放的控制解决方案。YDIFLY从第一性原理出发,重新思考了扑翼飞行器的每一个细节:如何高效利用每一点电量?如何可靠在空中飞行?如何让每个人都能上手制作?
因此我们不仅开源了所有的硬件、软件和结构文件,更配套了详细的教程。我们相信,只有开放的社区协作,才能将仿生飞行的魅力与性能发挥到极致。欢迎加入我们(Q群2:737891883),一起探索扑翼飞行的奥秘!
二、核心特色与优势(Features & Advantages)
1. ❤️ 极致能效,续航飞跃
采用高效稳压电路设计。电源转换率高达95%+(传统线性稳压方案仅60%~70%)。经过理论计算和实验测试,同等电池容量下,相比传统线性稳压方案续航时间提高17%。这意味着可以飞的更久,探索的更远。
2. 💪 强劲动力,驱动无忧
2A持续驱动能力。两路独立舵机驱动通道,可提供持续2A的输出电流,轻松驾驭市面上主流舵机,保证翅膀有力,动作精准。
3.🧠 智能监测,安全可控
实时电池电压回传。通过ESP8285的ADC精准检测电池电压,将数据实时传输至遥控端,设置低压报警,有效防止电池过放而损坏,提高电池寿命和飞行安全。
4.🚀 强大核心,扩展无限
以ESP8285为核心控制芯片。ESP8285为32位的微处理器,具有80MHz主频(远大于Arduino主控芯片的8位、16MHz主频;高于STM32F1系列32位、72MHz主频)
5.✨ 匠心设计,易于制作
开源且教程完备。我们承诺,这不仅仅是一个“扔代码”的项目。从材料采购、固件烧录、结构制作、焊接指导、调试校准、首次飞行,都将配有手把手视频教程,确保每个人都能成功。
三、技术规格(Specifications)
| 项目 | 参数 | 备注 |
| 主控芯片 | ESP8285 (80MHz, 1MB Flash, 集成Wi-Fi) | 性能远大于8位、16MHz的Arduino主控芯片;高于32位、72MHz的STM32F1系列 |
| 输入电压 | 2S Li-ion/Lipo (6.0V ~ 8.4V),电池直连 | 避免外置额外电路,减轻重量 |
| 舵机输出电压 | 5V | 标准舵机控制电压,适配市面上各种舵机 |
| 舵机通道 | 2路,独立控制 | 2路堵路控制,适配扑翼飞行 |
| 最大驱动电流 | 每路最大持续2A | 超大输出电流,轻松驾驭市面上主流舵机,保证翅膀有力 |
| 电源效率 | 最大95% (取决于负载) | 高效能源转换,比传统方案飞行续航时间提高17% |
| 电压采样 | 支持,通过ADC引脚回传 | 遥控实时显示电池电压,避免电池过放 |
| 通信接口 | 串口 (用于接收机、程序下载、调试) | 可用于连接接收机、程序下载、代码调试 |
| PCB尺寸 | 13.2 mm * 17.2 mm | |
| PCB工艺 | 单面布局,FR-4,1.0mm厚度 | |
| PCB重量 | 0.65g |
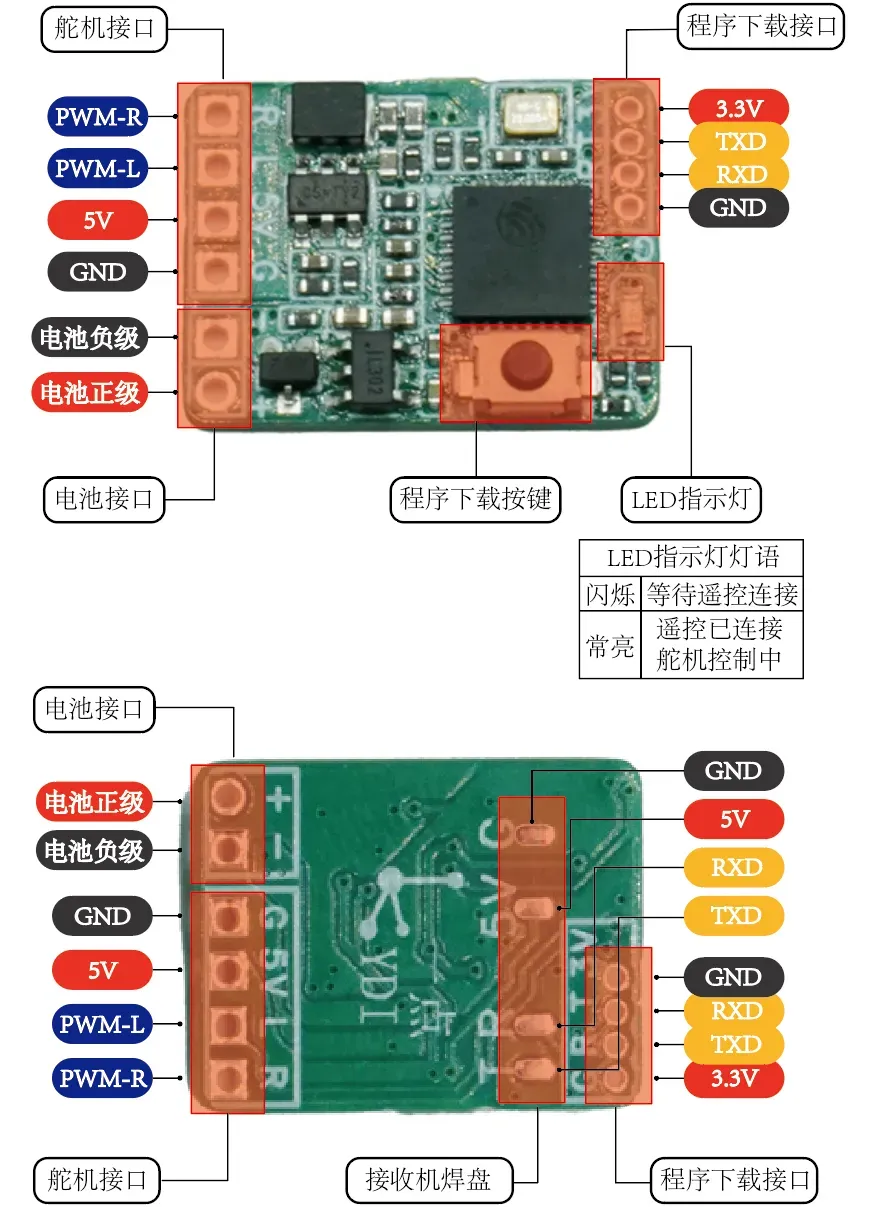
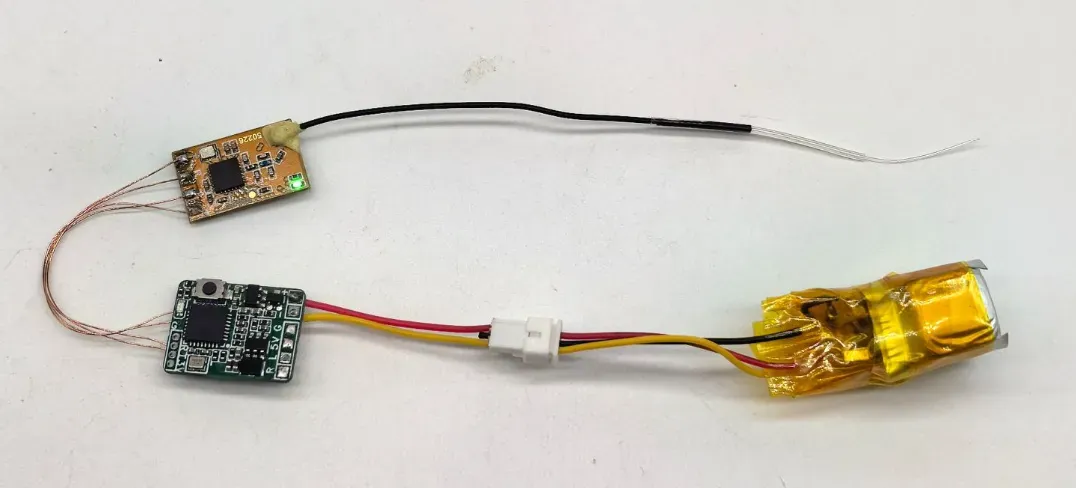
硬件资源图
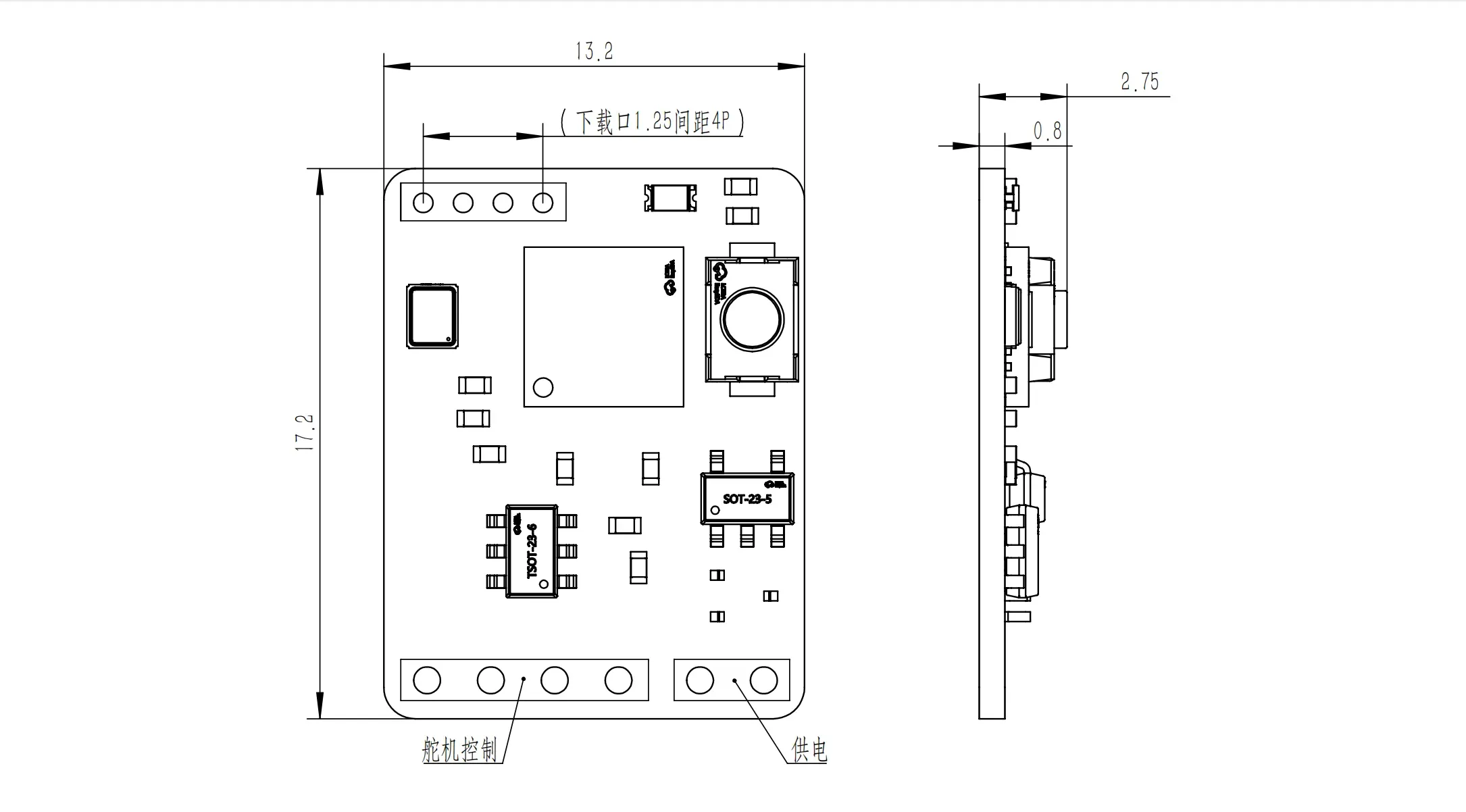
结构尺寸图

遥控功能图
四、项目内容以及教程 (Contents & Tutorials)
本项目开源仓库将包含:
1. 硬件: 完整电路原理图 (PDF/Schematic)、PCB布局文件 (Gerber)、元器件清单 (BOM)
- 开源硬件:立创开源网址
2. 软件: Arduino IDE 项目源码、基础驱动库、示例控制程序
- 开源代码:(见附件)
3. 结构:3D打印结构件参考文件 (STP/STL),整机采购物料清单
- 3D打印结构件:见交流Q群(2群:737891883)群文档
- 物料采购清单:(见附件)
4. 社区: 建立QQ群,供开发者交流经验、分享作品。
- Q群2:737891883
本项目详细资料和教程:
(教程持续更新中)
五、致谢与开源精神 (Acknowledgements)
本项目的开发深受OSHWHub等开源社区的影响,特别感谢各位大佬们提供的宝贵思路和代码。我们站在巨人的肩膀上,也希望YDIFLY能成为后来者前进的基石。感谢所有为开源硬件做出贡献的人!
六、社区共创与衍生设计 (Community Contributions)
这里我们会将一些优秀的设计方案开源出来,并将方案放到附件中。同时我们非常感谢社区开发者和同学们基于YDIFLY主控板进行二次开发与结构创新。
🌟 蝴蝶结构开源方案
- 来自 湖北大学智能制造学院 的开发团队,基于开源飞控板的升级版:一体式飞控板,完成了仿生蝴蝶扑翼飞行器机械系统的设计与开源。
-
- 项目负责人:蒋浩宇
- 核心成员:张元朔、齐文翰、李佳琪、段雅思
- 内容包括:
-
- SolidWorks建模文件
- 蝴蝶设计说明书
- 工程图纸
- 演示视频
- 方案介绍PPT
- 等
- 下载地址:https://pan.baidu.com/s/1VqRegYTcJnY2DD4ZPW5i1A?pwd=ydch 提取码: ydch
该开源方案基于开源飞控板的升级版:一体式飞控板进行开发,与当前开源的基础控制板方案属于同系列技术路线。
感谢他们的工作进一步完善了YDIFLY在机械结构与整机方向上的开源生态。
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









