



标准版
【开源】STM32四轴飞行器
18.0w
0
0
372
简介
参考小马哥RoboFly开源四轴制作的四轴飞行器
简介:参考小马哥RoboFly开源四轴制作的四轴飞行器开源协议
:GPL 3.0
创建时间:2020-03-19 13:57:45更新时间:2024-07-15 17:33:20
描述
前言
该四轴飞行器功能简单且飞行效果不稳定(PID参数调不好😂),制作难度也较大(容易碰到各种未知问题),推荐复刻下面的四轴:
一、简介
四轴飞行器工程包含三个版本,可在附件中下载不同版本的硬件资料:
①v1.0版(8520空心杯电机) - 已弃用
②v2.0版(720/715空心杯电机)

③v3.0新版(720电机座版)

四轴飞行器配套的遥控工程链接:STM32开源四轴遥控器
二、功能描述:
1.匿名上位机PID调参
2.互补滤波姿态解算,串级PID
3.SI24R1/nrf24l01 2.4G遥控,OLED实时显示四轴姿态,电压回传,可二次开发
4.STM32F103主控,集成MPU6050姿态传感器、WS2812B全彩指示灯等,预留可扩展接口
三、成品展示:
①、V3.0成品图


②、V2.0成品图

四、配件选型
1、电池: 3.7v航模锂电池 容量:500mAh左右(容量大太重影响起飞) 放电倍率:25C
2、电机:720空心杯电机/715空心杯电机 55mm螺旋桨
3、无线模块:无线模块可以使用SI24R1或NRF24L01,但四轴和遥控器的型号需使用一样,推荐类型如下

五、上位机PID调参设置
连接设置:1.端口为实际端口 2.波特率为460800

连接图:
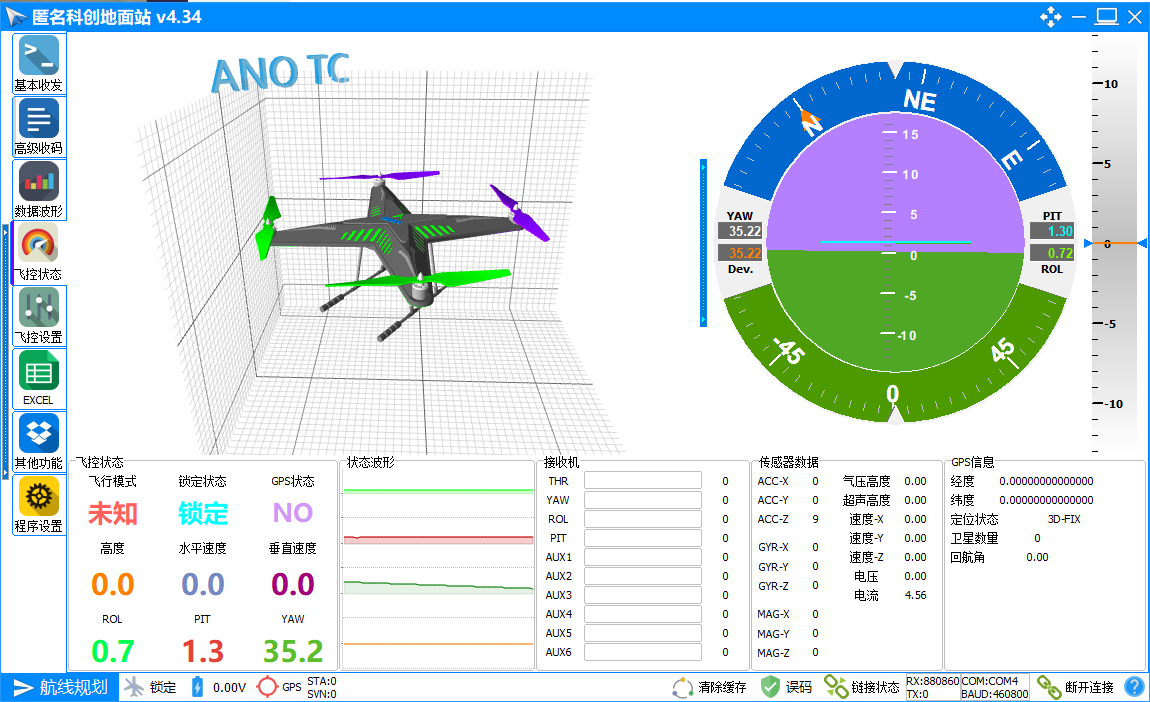
PID参数设置参考值:

五、注意事项
工程从 V1.0 版更新到 V2.0 版,元件布局有小改动,电机改为720空心杯
工程从 V2.0 版更新到 V3.0 版,元件布局有大改动,720电机使用电机座固定
1.电机为716/720空心杯电机,螺旋桨为55mm,电池为3.7V 1S 25C锂电池
2.硬件v2.0版空心杯电机安装孔直径为7.00mm,使用附件中的“720电机座.zip”固定
3.硬件v3.0版空心杯电机安装使用附件中的“V3.0版电机座.zip”固定
3.引出SWD程序烧录接口,需使用仿真器下载(ST-LINK即可),预留串口用于上位机PID调参
4.使用者需具备一定电子基础以及四轴飞行器相关知识,工程并非打板焊接下载程序即可飞行,需进行动力分配、PID调参等
5.PCB工程以外的问题,看小马哥开源四轴学习视频:小马哥DragonFly四轴STM32单片机课程,适合四轴初学者完整教程
6.电子业余爱好者,无法保证PCB布局设计的规范性,设计有待提高,使用过程暂未发现其他问题,有问题可以在下方评论区留言
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









