


【立创开发板】梁山派•瓦力机器人
简介
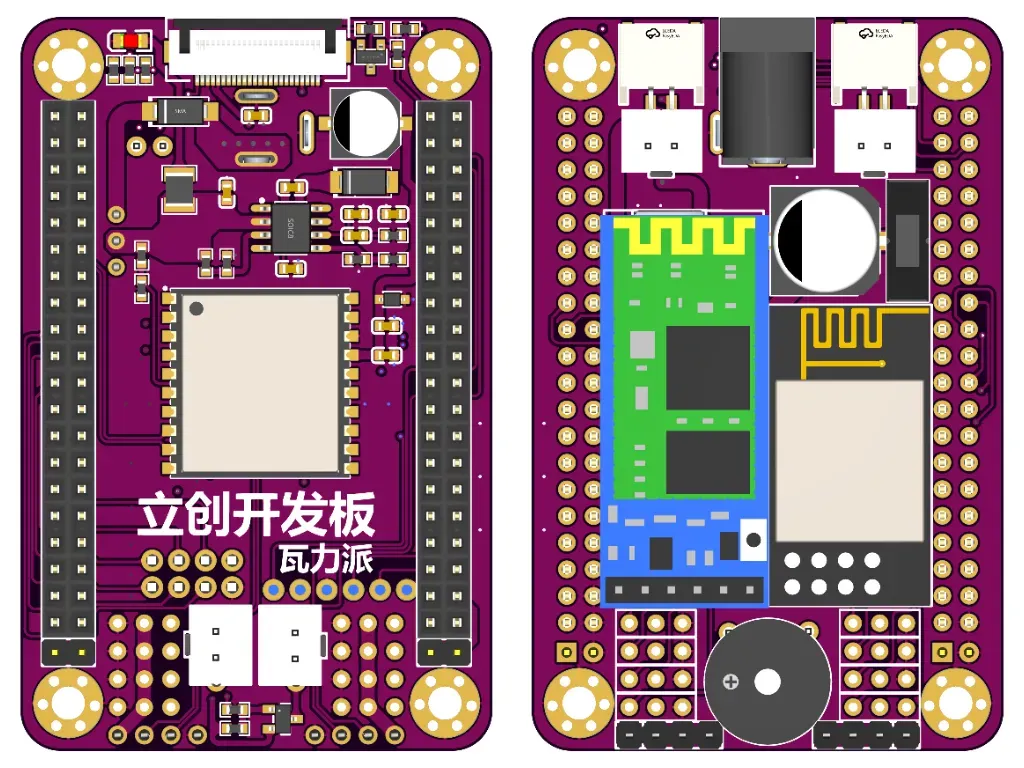
基于梁山派(GD32)设计的瓦力机器人,配备蓝牙,2.4G进行遥控通信控制,支持8路舵机控制,板载1.3寸ISP LCD屏,协配VC-02进行语音交互,摄像头模块支持150米实时图传。
简介:基于梁山派(GD32)设计的瓦力机器人,配备蓝牙,2.4G进行遥控通信控制,支持8路舵机控制,板载1.3寸ISP LCD屏,协配VC-02进行语音交互,摄像头模块支持150米实时图传。开源协议
:GPL 3.0
描述
项目更新
2025.6.10:优化布局布线,更新板子命名
角色介绍
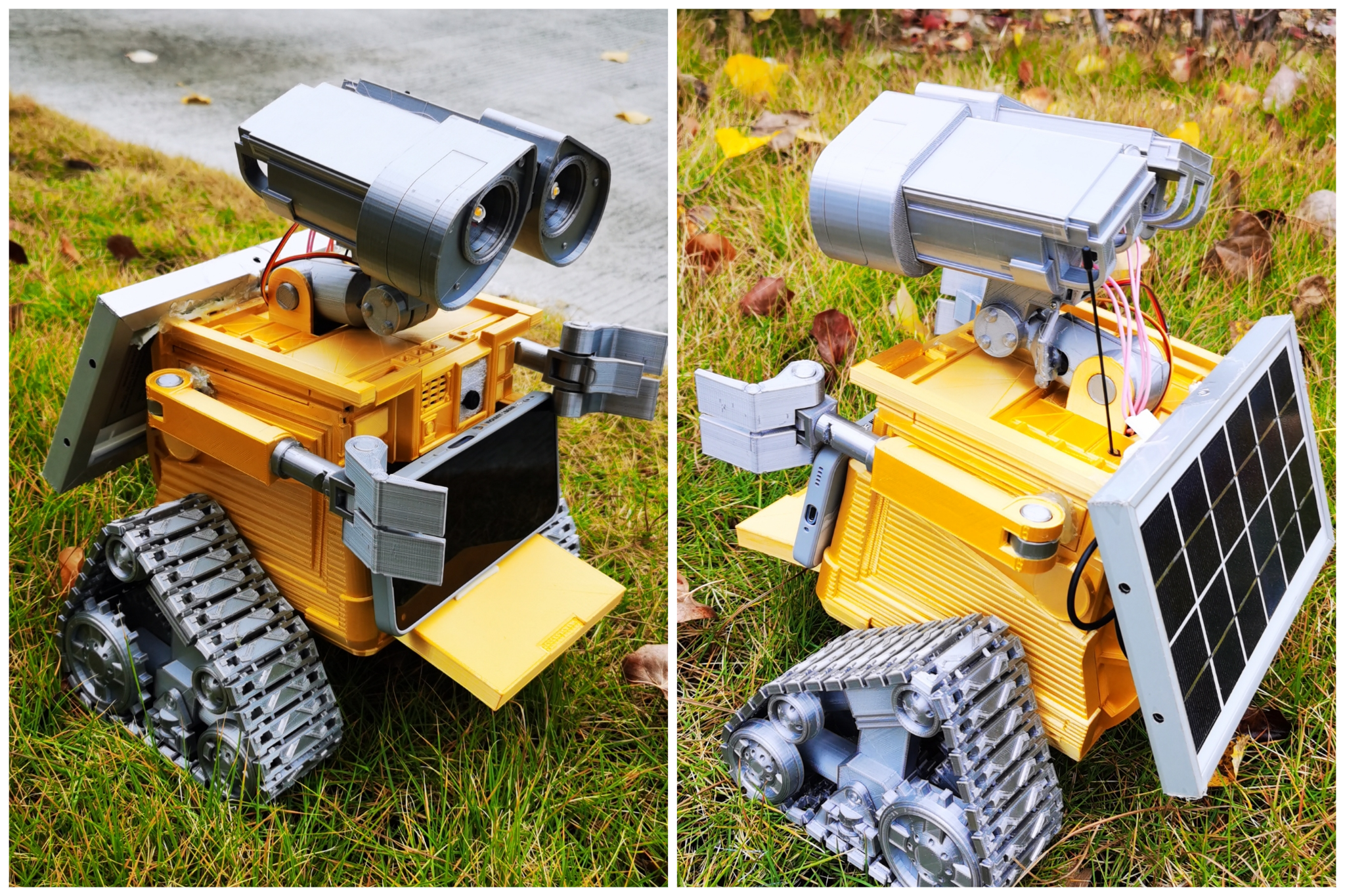
瓦力是电影《机器人总动员》中的一个虚构角色,亦是该片的主角。他是一台虚构的型号为 WALL-E(Waste Allocation Load Lifter Earth Class,地球版垃圾配置承载起重机)的机器人,后来一见钟情地喜欢上了新形异星植物探测女机器人**伊芙**(EVE,Extraterrestrial Vegetation Evaluator,但被瓦力叫做Eva 伊娃)。原本,“瓦力”是指影片虚构的特大型美国公司BnL(Buy n Large)生产的一系列清扫型机器人,但到了片中故事发生的年代,全世界的瓦力除了片中的这台外都已报废退役,故“瓦力”专指这最后的一台。
项目方案
项目方案是一个计划、策略或计划书,旨在指导一个项目的实现。它描述了项目的目标、范围、时间表、预算和资源分配等方面的细节。

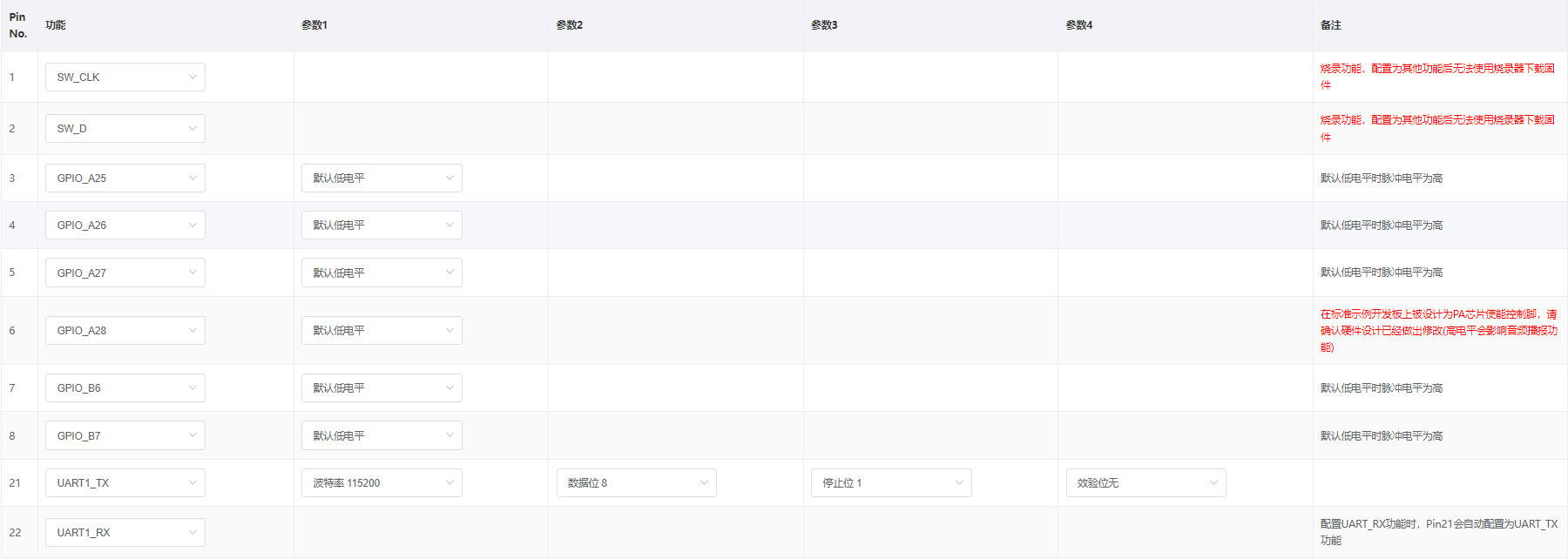
梁山派选用的是GD32F470ZGT6,为充分利用其资源,将可用外设设置成表格形式,清晰明了。

选型说明
选型说明是项目实施过程中非常重要的一部分,因为它直接影响项目的成本、时间和质量等方面的结果。因此,需要认真制定选型说明,全面评估各种因素,选择最佳选项,并对选项的利弊进行充分的评估和比较。
瓦力3D外壳整体高度33CM,宽度30CM,空壳2.2kg,因此所搭载直流电机应有足够的驱动能力。选择合适的电机——>设配电机的电源,设配电机的驱动IC——>适配电源的降压电源IC。
1. 24V降压DC—DC电源IC:TPS54331DDAR
>* 功能类型:降压型
>* 电压输入:3.5V 至 28V
>* 电压输出: 可调节输出电压低至 0.8V
2. 舵机驱动IC:PCA9685
>* 通信方式:I2C
>* 工作电源电压:2.3V 至 5.5V
>* 驱动数量:最多驱动16路LED(舵机)
3. 电机驱动IC:AS4950
>* 宽电压供电:8V 至 40V
>* 3.5A峰值驱动输出,2A持续输出能力
| 电机驱动状态 | IN1 | IN2 |
|---|---|---|
| 空 | / | / |
| 停止 | 0 | 0 |
| 正转 | 0 | 1 |
| 反转 | 1 | 0 |
| 刹车 | 1 | 1 |
4. 语音模块IC:VC-02_CN
>* 供电电压:3.6V 至 5V
>* 支持接口:UART / I2C / PWM / SPI / GPIO
>* 可用IO数量:10个
安信可语音开放平台:http://voice.ai-thinker.com/#/
通过SDK配置GPIO_B2为UART1_TX,GPIO_B3为UART1_RX,使VC-02的B2、B3脚复用为串口功能,以与GD32的USART2进行通讯。
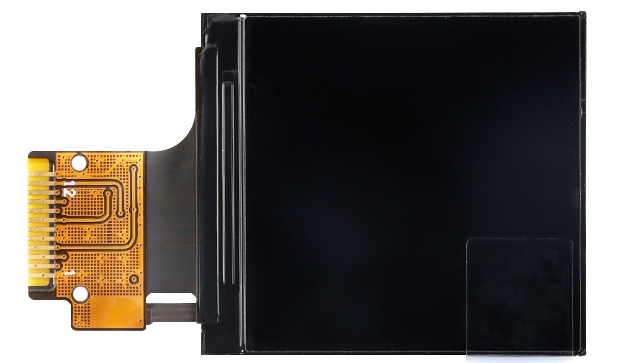
5. LCD:1.3寸ISP 购买链接
>* 分辨率:240(H)RGB * 240(V)
>* 接口类型:SPI / 并口
>* 驱动芯片:ST7789V
>* 工作电压:3.3V
6. 电机:24V直流电机 购买链接
>* 工作电压:24V
>* 空载转速:200转/分钟
>* 额定扭力:1.3kgf.cm

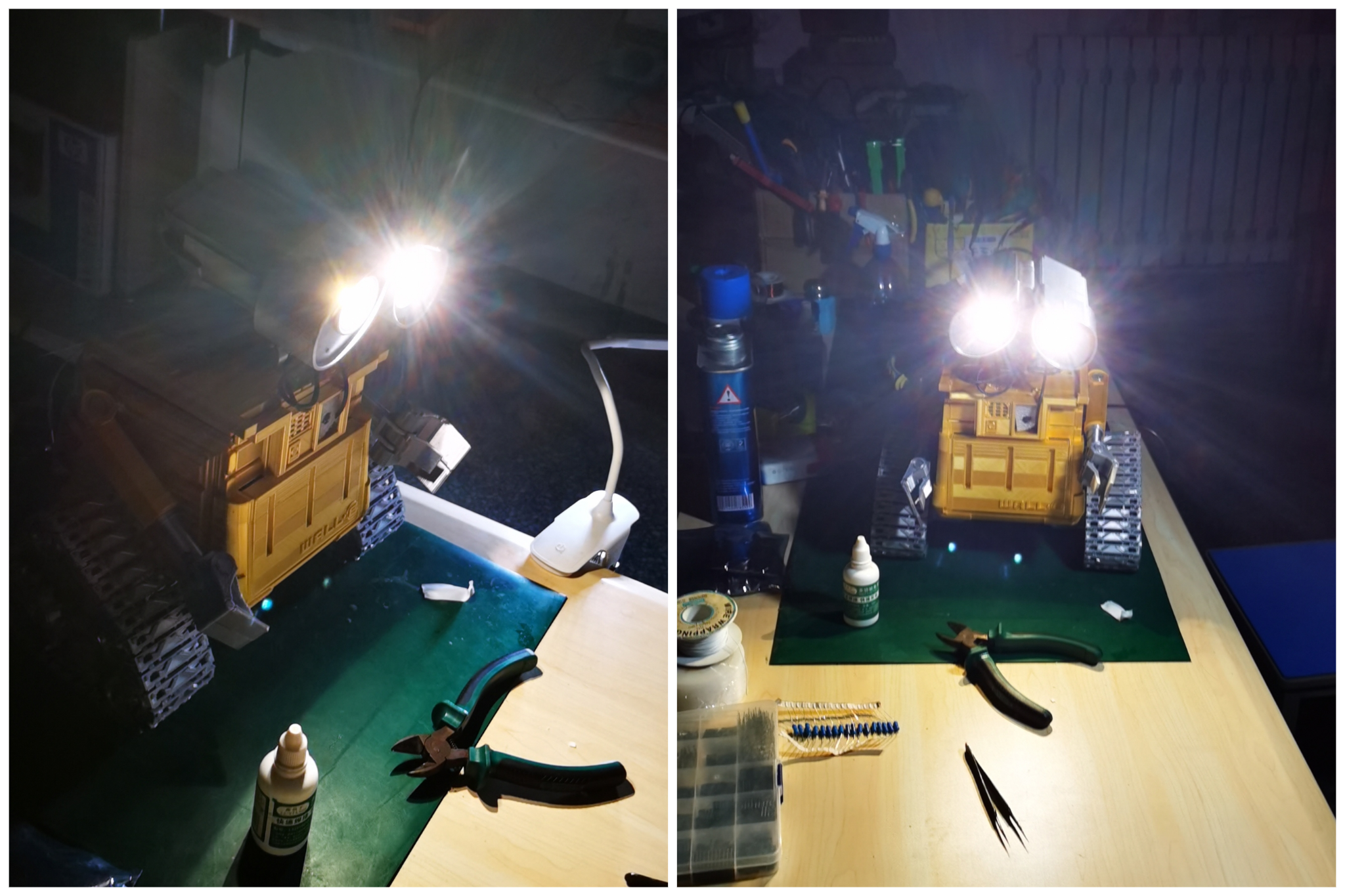
7. LED灯珠:1W功率 购买链接
普通的LED怎能配得上我的瓦力呢,我要找颗最闪耀的~

夜空中,我最闪耀 !!! (手动狗头)
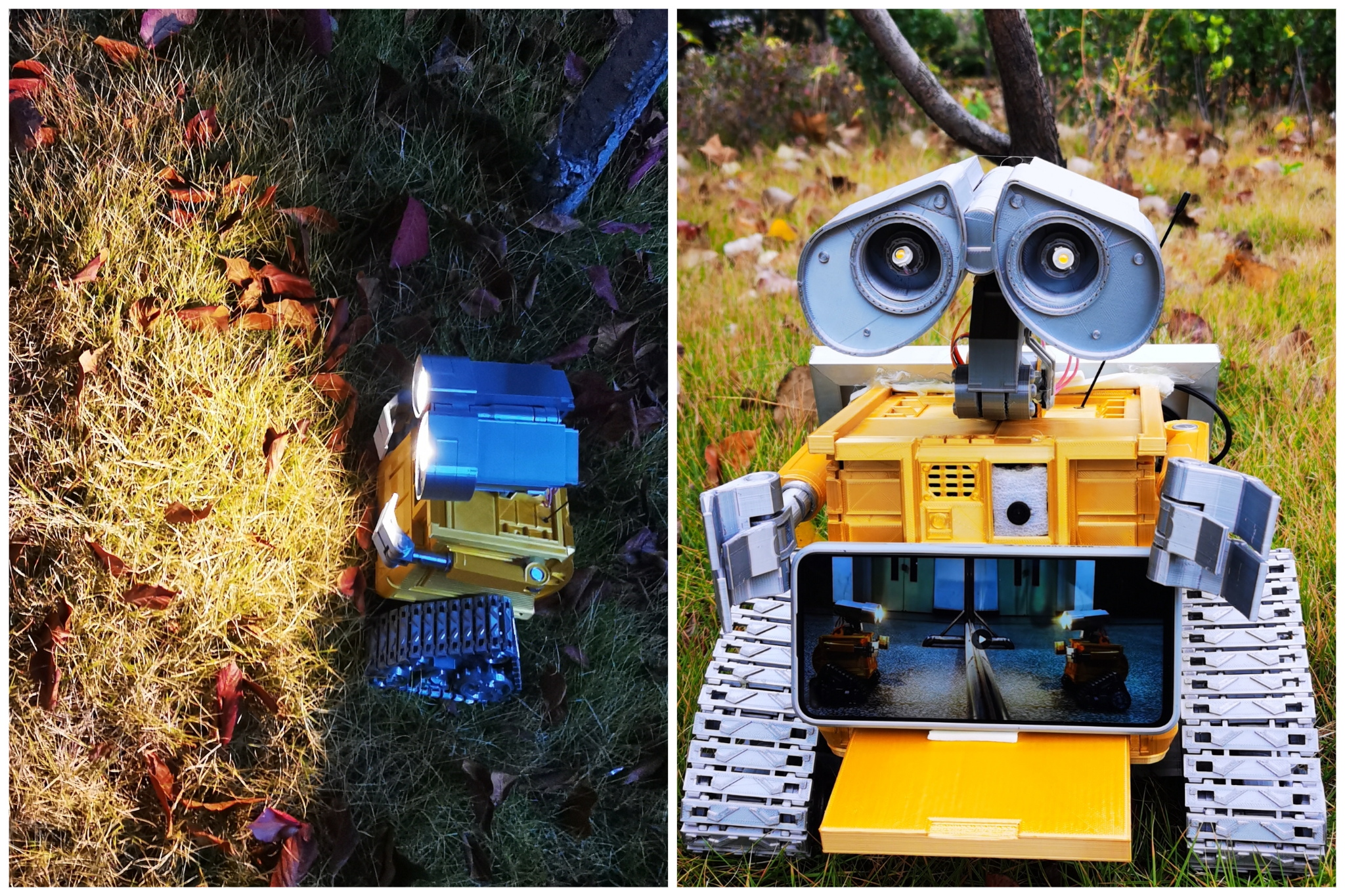
8. 摄像头:Mlink-video 购买链接
>* 优点:体积小,画质高,配套APP
>* 缺点:最高仅支持150米图传,价格小贵
最初打算设计个图传,集成于拓展板上,可是能参考的方案只找到了ESP32-CAM,而且加上后板子整体过于冗余,成功率不敢保证,于是便舍弃了自设图传方案,选用Mlink-video的WiFi图传模块。

调试过程
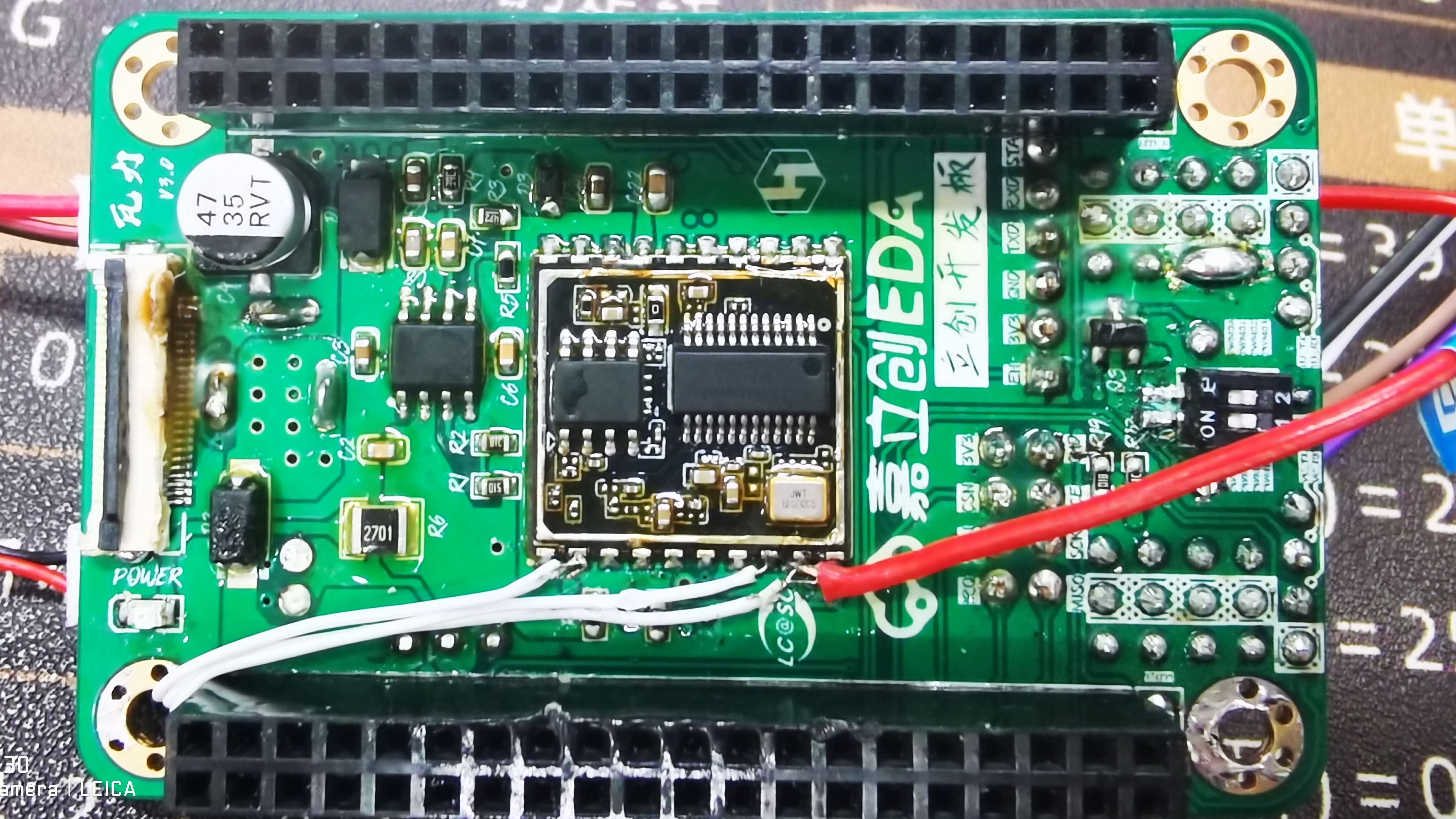
费劲千辛万苦,终于把它焊完啦 多么精致的板子
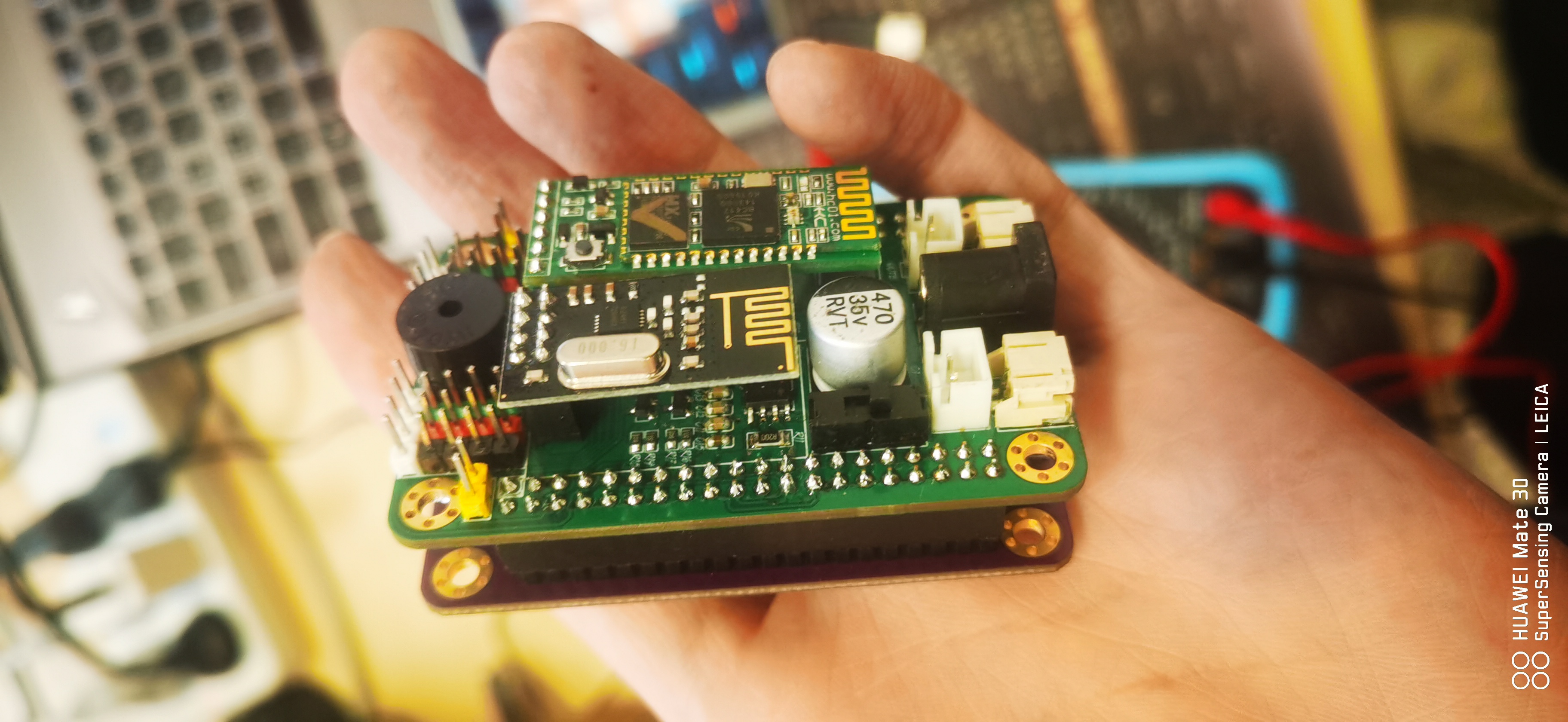
测了下板子温度,整体温度不超标。

调试语音过程中,发现咪头不起作用,万用表测量发现语音芯片的MIC+和MIC-短接在一起,猜测在芯片底部有连锡现象,在拆解过程中可谓是异常艰难,怎么拆也拆不下来,最终在社员的帮助下,终于。。。。。。
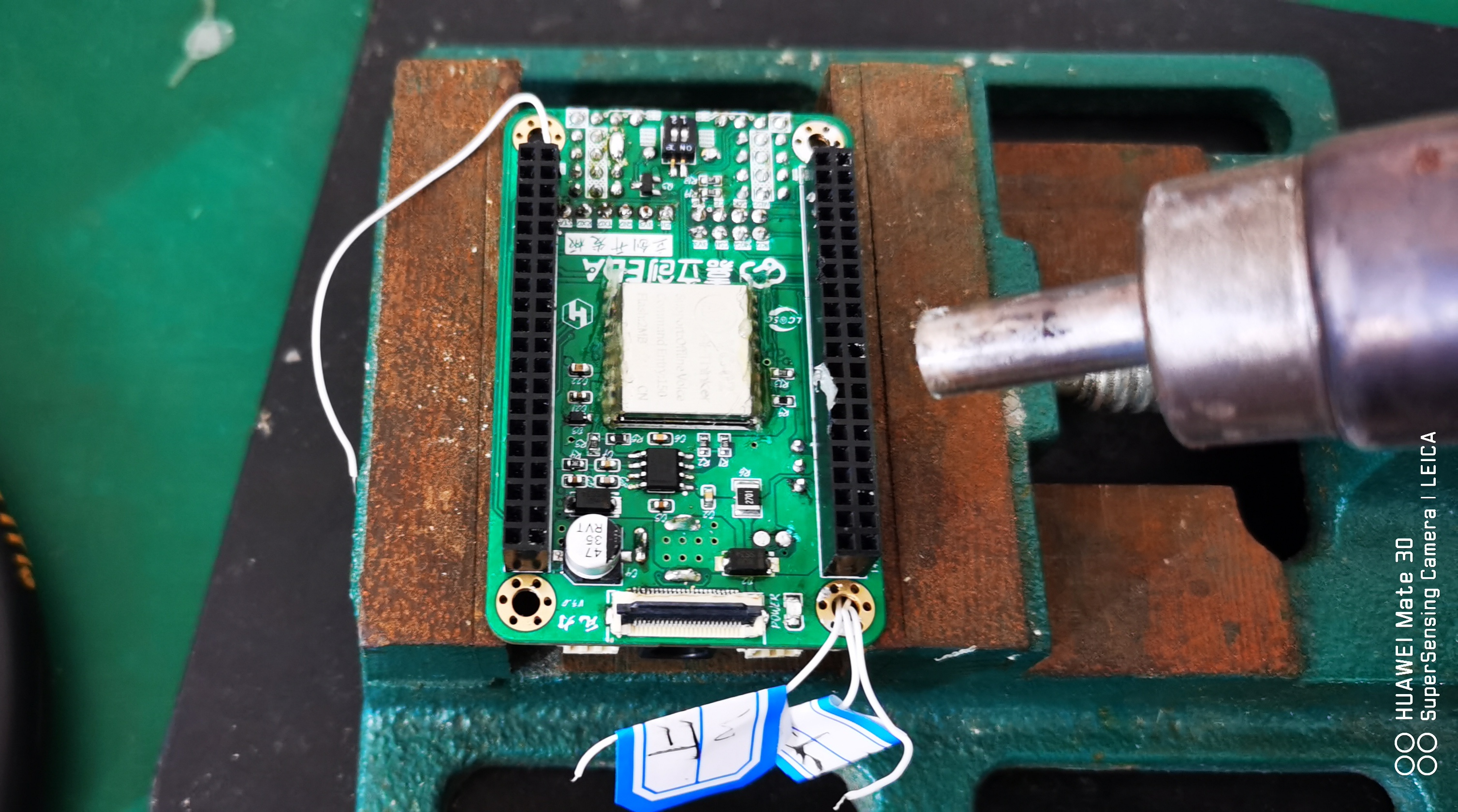
没错,把屏蔽壳拆下来了 笑哭 (板子上的飞线是VC-02管脚的复用UART功能,原理图中没有设计)
可笑的是,拆下屏蔽壳之后,错误竟然排除了(不是底部连锡),原因竟是屏蔽壳有问题。
原理图设计说明
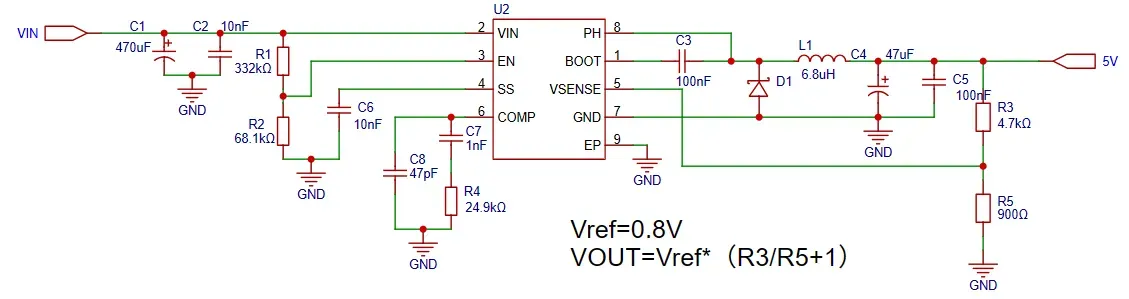
1. 电源降压设计
TPS54331 器件的输出电压可从外部通过电阻分压器网络进行调节。如图所示,此分压器网络由 R3 和 R5 组成。方程式 4 和方程式 5 给出了输出电压与电阻分压器之间的关系。
电压基准系统通过调节具有温度稳定性的带隙电路的输出产生 ±2% 初始精度电压基准(±3.5% 过温)。典型电压
基准(Vref)设计为 0.8V。
Vout = Vref ×(R3/R5+1)
OUT_5V = 0.8 ×(4.7k/900+1)= 4.978 V
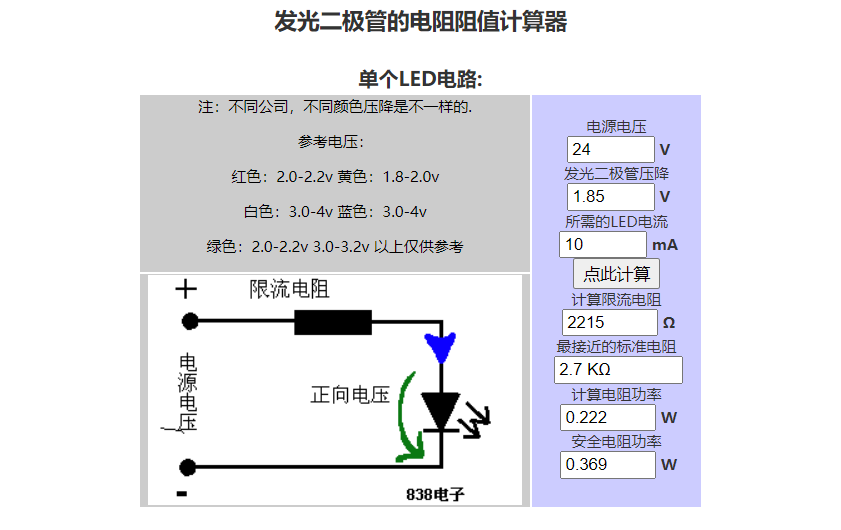
2. 电源指示灯设计
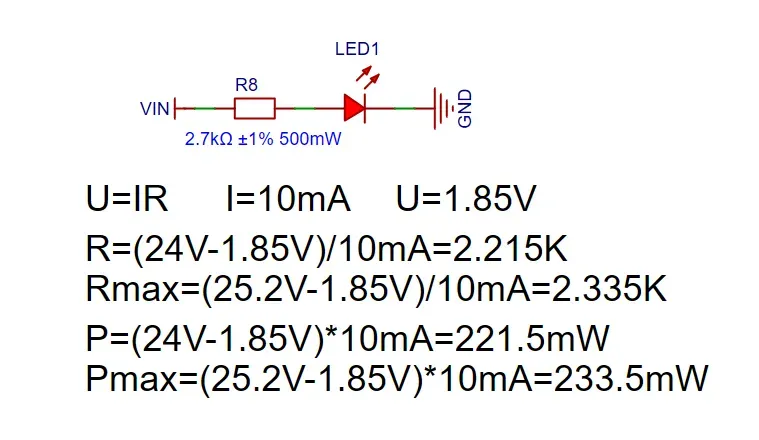
LED限流电阻公式:
限流电阻 = (供电电压 - LED压降)/ 额定电流
从以往的经验得知,设计一个3.3V的LED限流电阻大概用个4.7k的电阻,设计一个7.4V的大概用个10k的电阻,于是便想着本次24V的项目怎么也得用个几十k的电阻吧。而根据上面的公式计算出的电阻阻值最大只有2.335k,模糊的概念便促使着我继续查找了这方面的资料,于是便找到这个非常好用的工具,在这里分享给大家:LED限流电阻阻值计算器
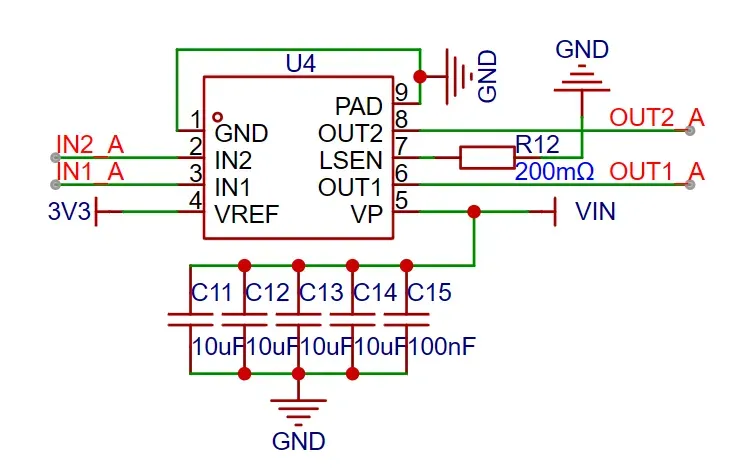
3. 电机驱动设计
电源VIN到芯片VP应有两个滤波电容,大电容为250uF,小电容为100nF,大电容可以用体积大的电解电容,但却占了很大的面积。于是我选用四个10uF的普通贴片电容并联在一起,以达到250uF的容值,经实物验证此设计可行。
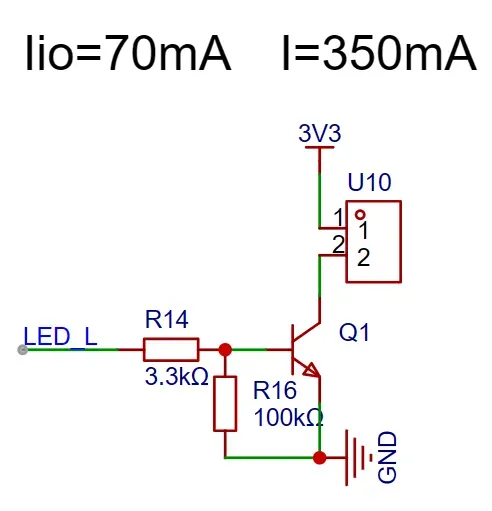
4. 眼灯设计
众所周知,单片机IO口输出电流有限,仅有70mA,而1W的LED灯珠需要额定350mA,于是便用了一个NPN型的三极管(最大输出500mA)以输出足够大的电流驱动负载。
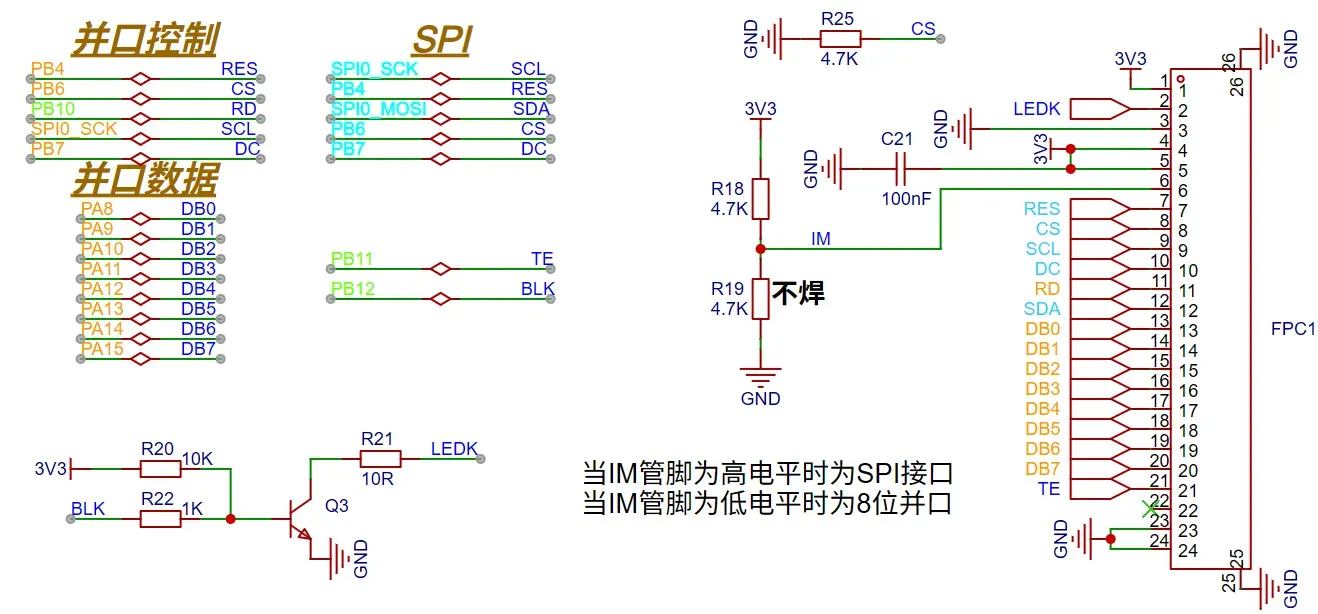
5. LCD设计
此1.3寸的LCD可支持两种接口:并口 / SPI ,为充分利用MCU资源,于是采取了两种接口的连接画法,为程序实现提供了多种方式。
PCB设计说明
PCB整体采用4层板设计,面积配合梁山派,一样的边框,一样的大小。
~~好消息:沉金工艺 坏消息:只能绿色,要是配合梁山派的紫色就更好了~~~
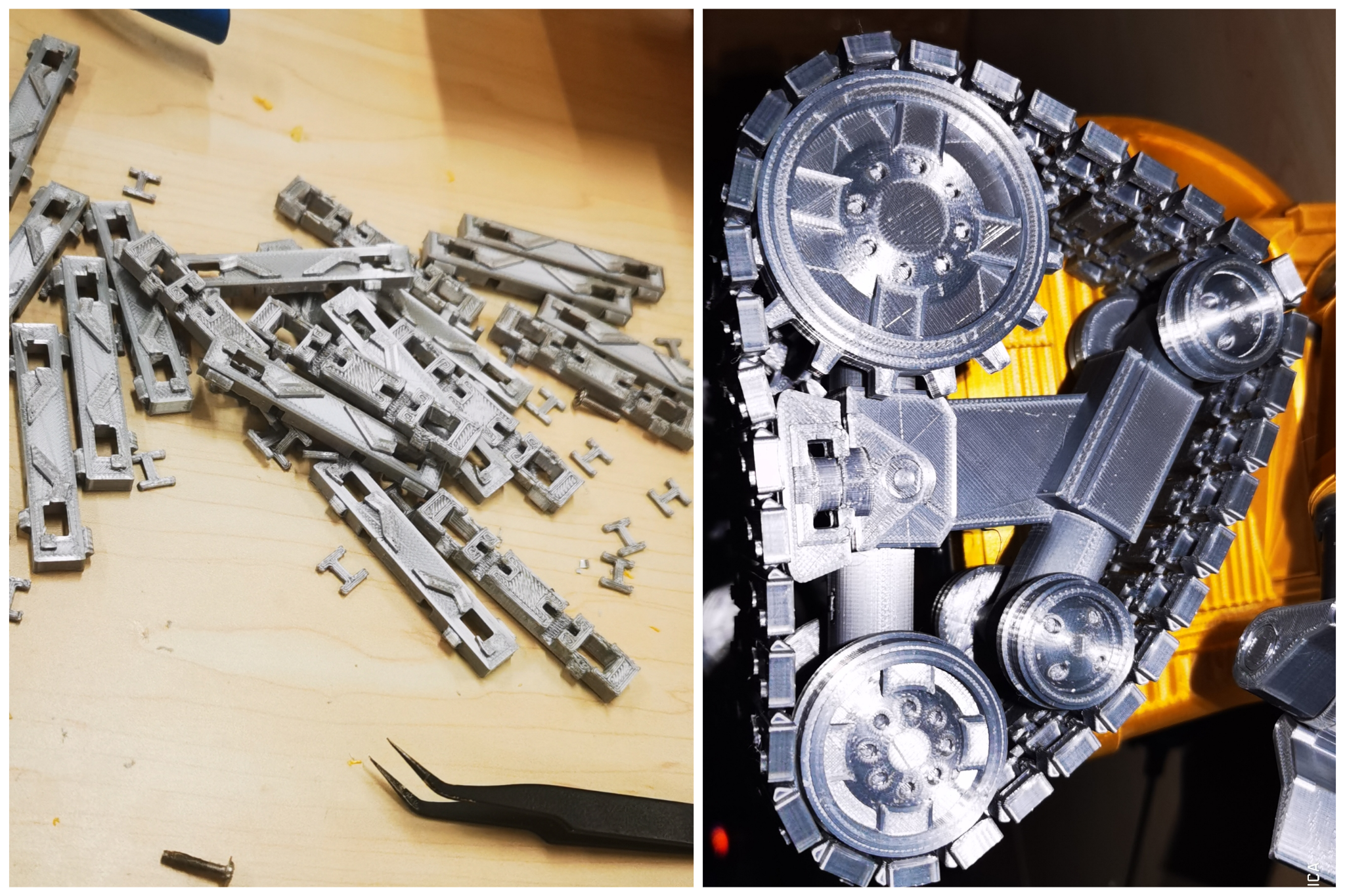
3D模型说明
3D模型零件数量高达好几百个,打印周期长,注意选好打印密度和支撑。履带的打印支撑,要用镊子一点一点地清理干净,否则会影响其他零件的安装(花了一整天才清理干净所有的支撑)。
蓝牙APP说明
不需写代码的蓝牙APP制作工具,贼好用,MIT APP INVENTOR,推荐大家去使用

程序说明
- VC-02与GD32进行串口通讯,进行语音交互控制命令。
- 语音MCU VC-02生成SDK中,只能通过串口发送十六进制数,而串口接收数据缓存的uint8_t型,因此要进行数据转换。
HexChar函数的功能是将16进制字符由ASCII码转为相应大小的16进制数:
char HexChar(char c)
{
if((c>='0')&&(c<='9'))
return c-'0';
else if((c>='A')&&(c<='F'))
return c-'A'+10;
else if((c>='a')&&(c<='f'))
return c-'a'+10;
else
return 0x10;
}
VC-02执行语句:
if(strcmp((char *)g_recv_buff_2,str_vc1)==0) BUZZER_ON;
else if(strcmp((char *)g_recv_buff_2,str_vc2)==0) BUZZER_OFF;
else if(strcmp((char *)g_recv_buff_2,str_vc3)==0) EYE_L_ON;
else if(strcmp((char *)g_recv_buff_2,str_vc4)==0) EYE_L_OFF;
else if(strcmp((char *)g_recv_buff_2,str_vc5)==0) EYE_R_ON;
else if(strcmp((char *)g_recv_buff_2,str_vc6)==0) EYE_R_OFF;
else if(strcmp((char *)g_recv_buff_2,str_vc7)==0) MOTOR_FORWARD;
else if(strcmp((char *)g_recv_buff_2,str_vc8)==0) MOTOR_BACKWARD;
else if(strcmp((char *)g_recv_buff_2,str_vc9)==0) MOTOR_LEFTWARD;
else if(strcmp((char *)g_recv_buff_2,str_vc10)==0) MOTOR_RIGHTWARD;
else if(strcmp((char *)g_recv_buff_2,str_vc11)==0) MOTOR_STOP;
else if(strcmp((char *)g_recv_buff_2,str_vc12)==0) SERVO_WORK;
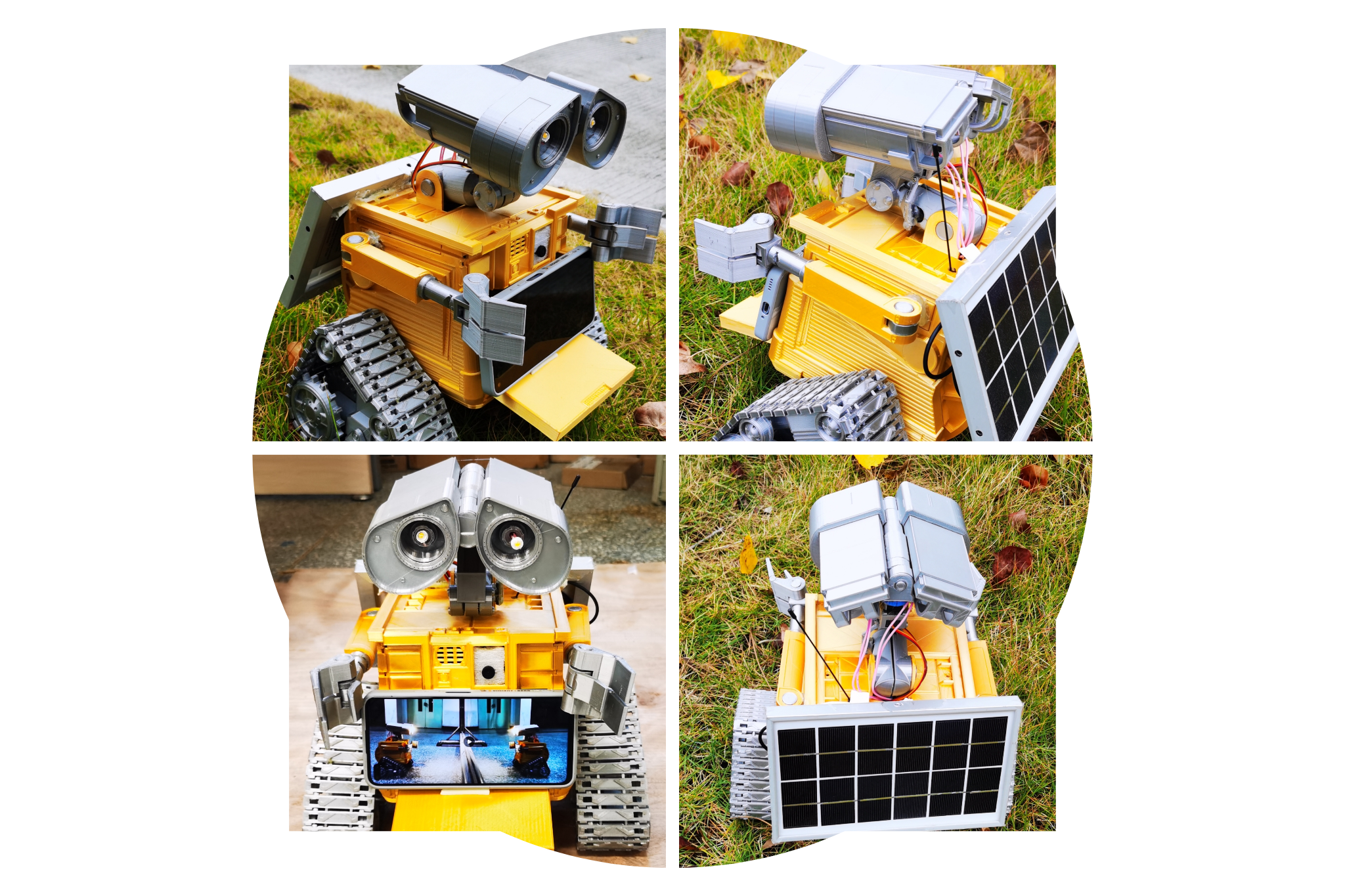
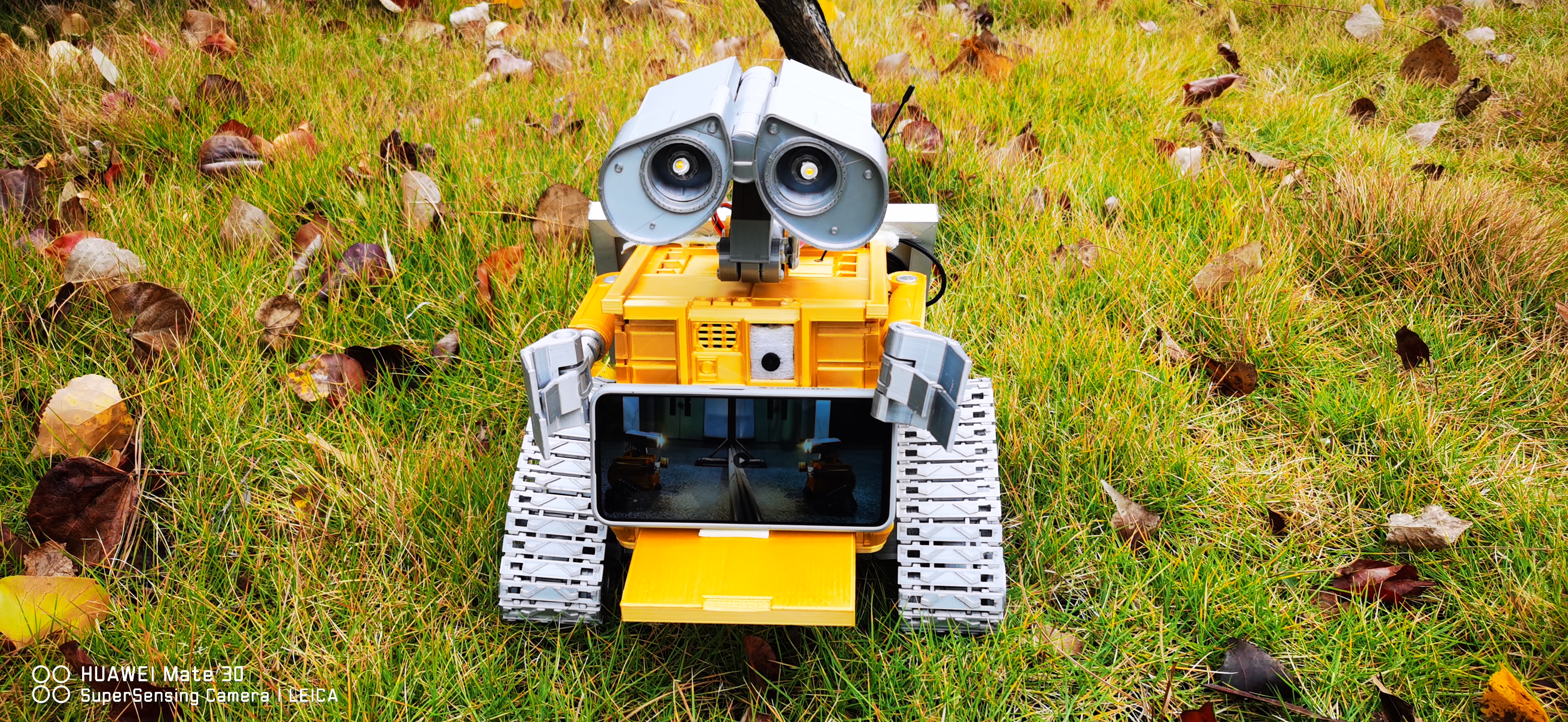
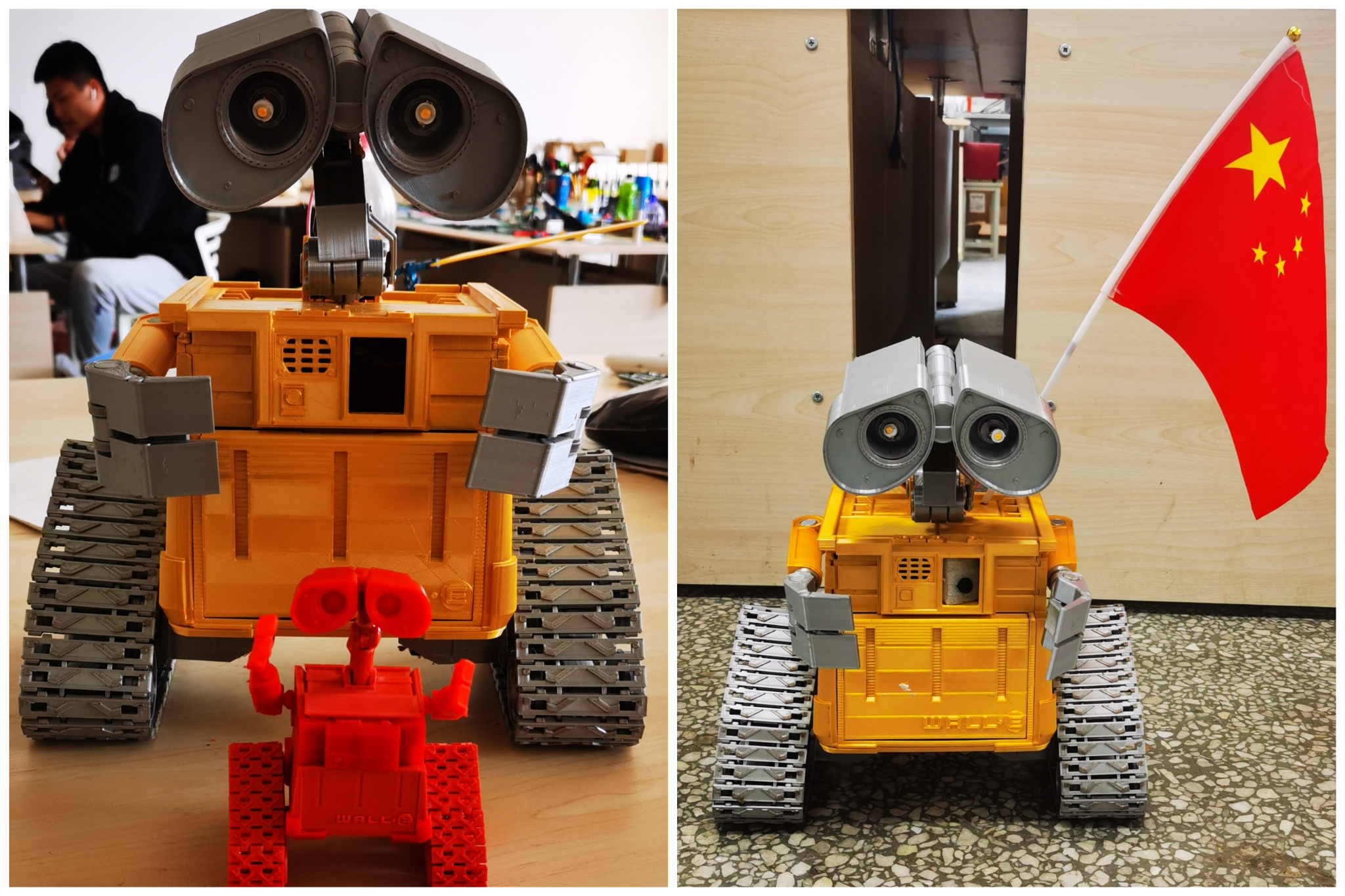
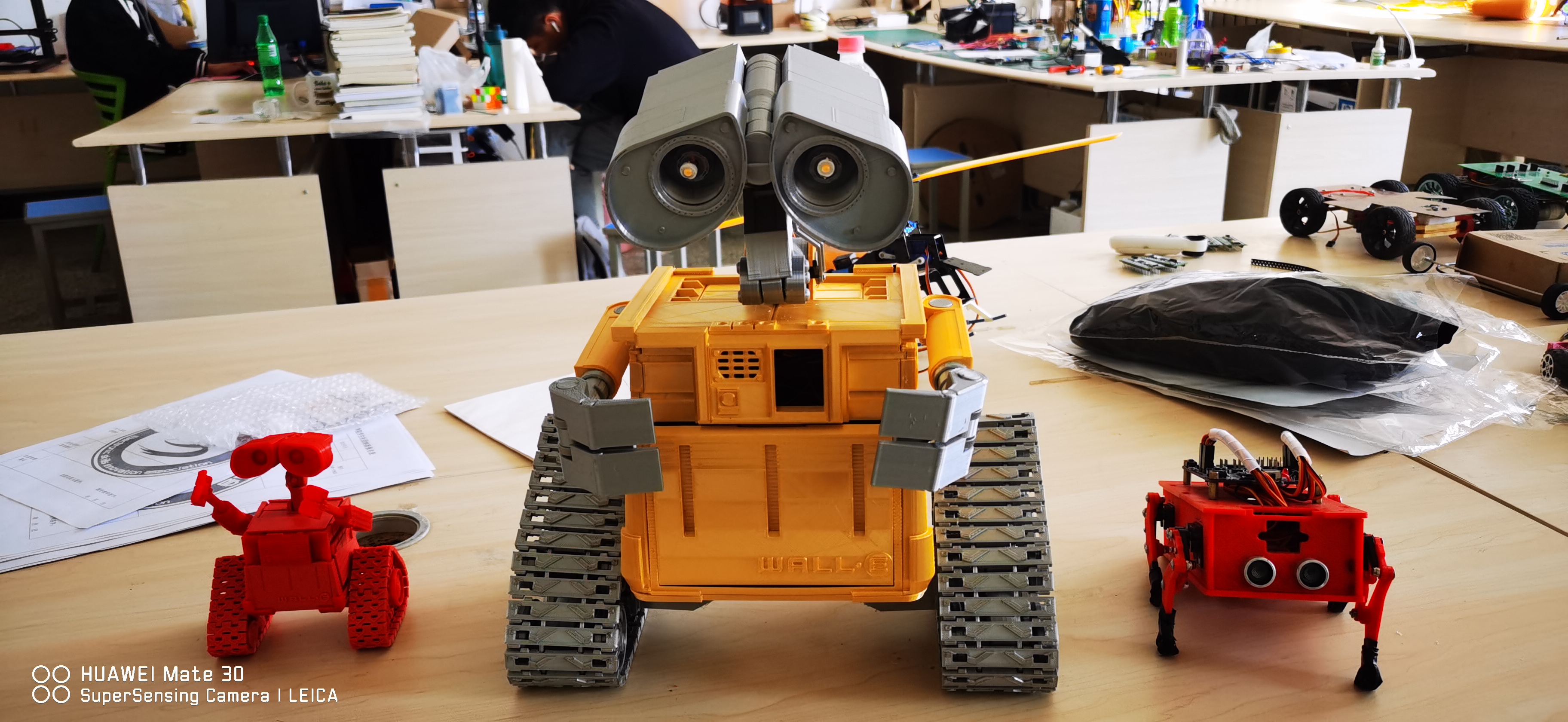
实物展示
说了那么多,快来让我们欣赏可可爱爱的瓦力吧~~



任务进度
-
蜂鸣器 -
眼灯 -
电机驱动 -
VC-02 -
蓝牙HC-05 -
摄像头模块 -
ADC电量检测 -
LCD - 舵机
- 2.4G
其它附件上传
>###### 瓦力视频√
>###### 语音交互视频√
>###### LCD显示视频√
>###### 瓦力3D模型√
>###### 瓦力APP√
>###### 瓦力拓展板引脚分配表√
>###### 瓦力语音识别程序√
>###### 瓦力蓝牙遥控程序√
>###### 综合运行程序√
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









