


专业版
简易PID项目
96
0
0
0
简介
基于立创·天空星STM32F407VxT6开发板制作的简易 PID 入门套件,对带编码器的电机,使用 PID 控制算法实现定速和定距功能,再通过屏幕显示出 PID 参数以及当前值与目标值的曲线变化。
简介:基于立创·天空星STM32F407VxT6开发板制作的简易 PID 入门套件,对带编码器的电机,使用 PID 控制算法实现定速和定距功能,再通过屏幕显示出 PID 参数以及当前值与目标值的曲线变化。开源协议
:GPL 3.0
(未经作者授权,禁止转载)创建时间:2025-05-15 16:43:05更新时间:2025-06-06 10:25:00
描述
一、硬件电路介绍
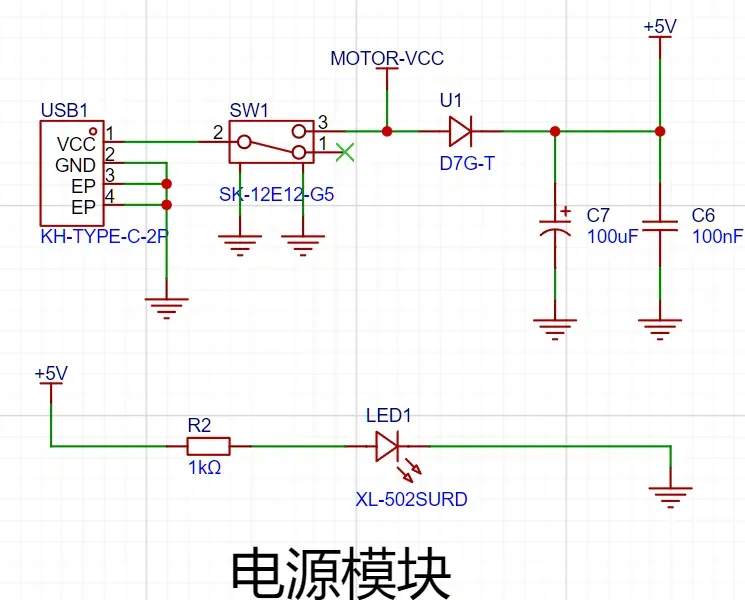
1.电源电路
电路电源由type c接口提供5V的直流电,该type c接口不能传输数据,仅仅作为提供电源的作用。设计中加肖特基二极管作为反接保护,相关耦合电容具有滤波作用,LED1作为电源电路设计的电源指示灯。
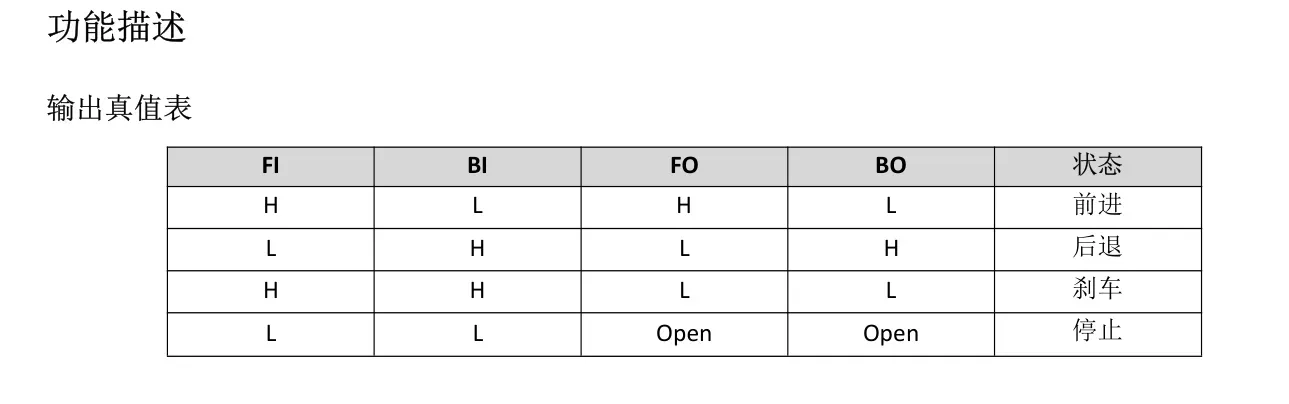
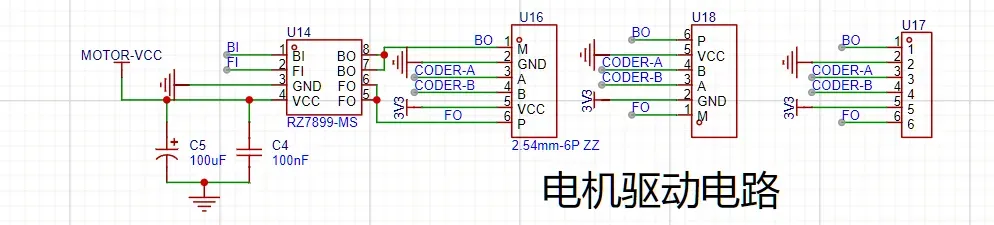
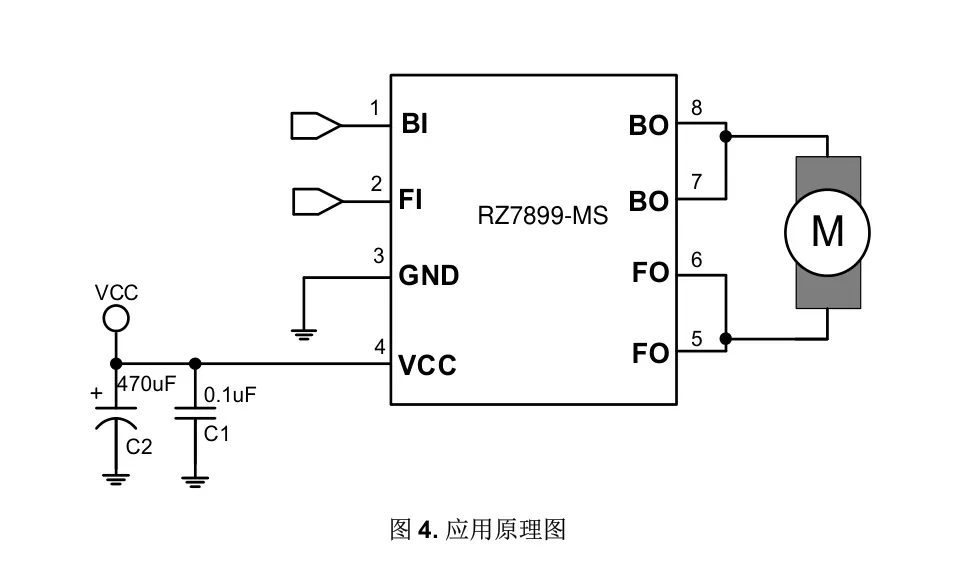
2.电机驱动电路
电机的驱动芯片, 原版的是BDR6126D,在进行本科毕业设计中我用到了RZ7889,两者的真值表一模一样,因此进行了合理的等效使用。它是一款大功率直流电机驱动芯片,最高输入 18V,最大持续输出电流 4.5A。
C1,C2 为 VCC 输入电容,其具有以下的作用:
(1)1 吸收马达向电源释放的能量,稳定电源电压,避免 IC 因突波电压过高而被直接击穿,且有滤波之功能。
(2)在马达启动的瞬间,能释放电流,帮助马达迅速启动。
(3)VCC 输入电容 C2 的选择需依照 VCC 的电压稳定性及马达负载电流大小去选择电容,如果 VCC 的电压文
波较大或是马达负载电流较大,则须选择更大的电容值。
(1)1 吸收马达向电源释放的能量,稳定电源电压,避免 IC 因突波电压过高而被直接击穿,且有滤波之功能。
(2)在马达启动的瞬间,能释放电流,帮助马达迅速启动。
(3)VCC 输入电容 C2 的选择需依照 VCC 的电压稳定性及马达负载电流大小去选择电容,如果 VCC 的电压文
波较大或是马达负载电流较大,则须选择更大的电容值。
3.按键输入
按键输入就是工程常见的独立按键,由于之前做毕业设计剩余一些按键,因此将按键型号全部替换为自己所拥有的。将立创天空星的GPIO引脚直接接入按键,当GPIO引脚检测到低电平时,证明按键按下。

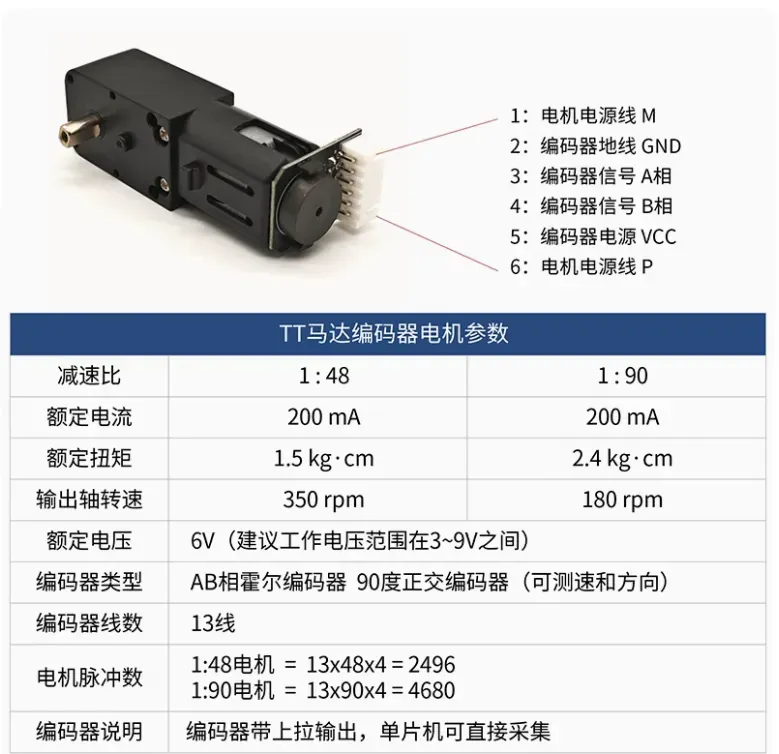
4.编码器部分
用的是电机和编码器一体的元器件,购买链接:AB相编码器电机 智能小车 TT马达 码盘测速 两轮自平衡小车竞赛-淘宝网
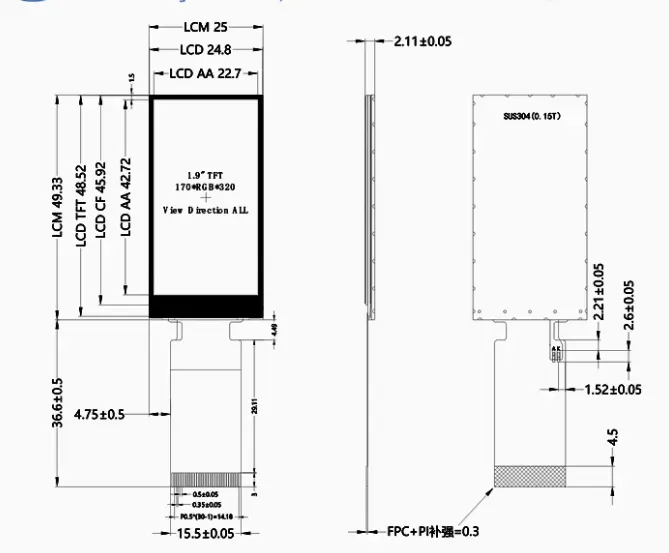
5.显示模块
该模块采用的是金逸晨1.9寸TFT液晶屏ST7789小屏170*320长条屏LCD全视角SPI彩屏
购买链接:金逸晨1.9寸TFT液晶屏ST7789小屏170*320长条屏LCD全视角SPI彩屏-淘宝网
显示模块的1.9寸屏幕,尺寸指标:
- 驱动芯片:ST7789
- 屏幕像素:170x320
- 屏幕尺寸:1.9寸
- 通信接口:SPI
- 接口线序:GND VCC SCL SDA RES DC CS BLK
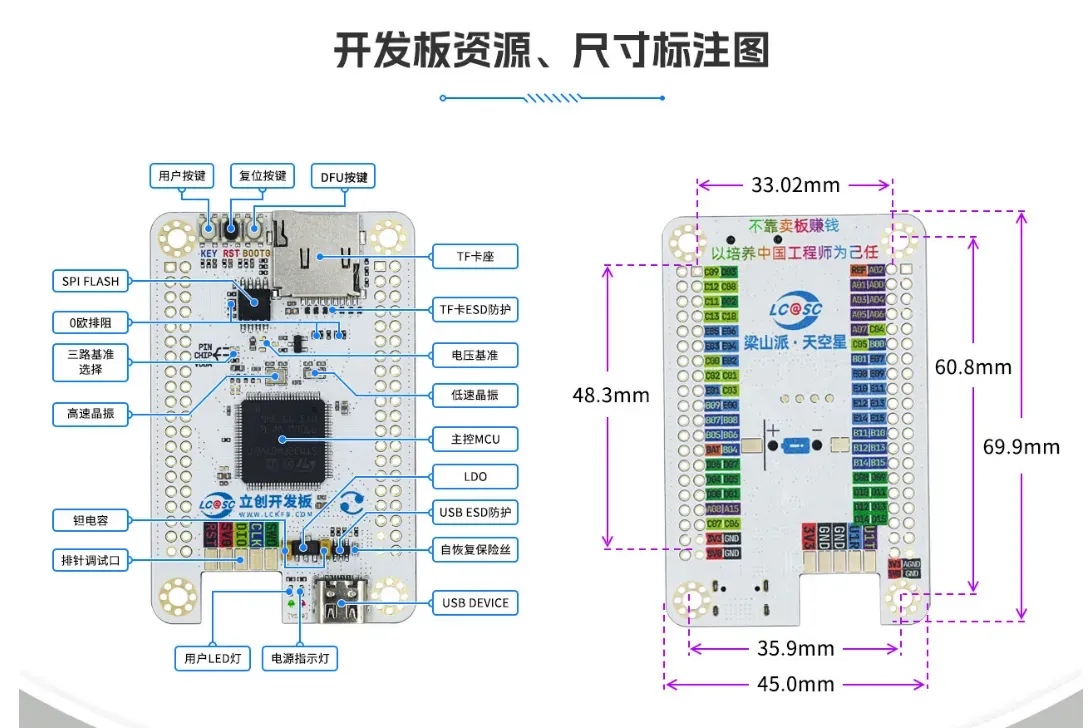
6.主控芯片
高性价比STM32F407VGT6主控,主频高达168Mhz,
FLASH:1024KB,一板兼容百芯,创新不止于一片!
FLASH:1024KB,一板兼容百芯,创新不止于一片!
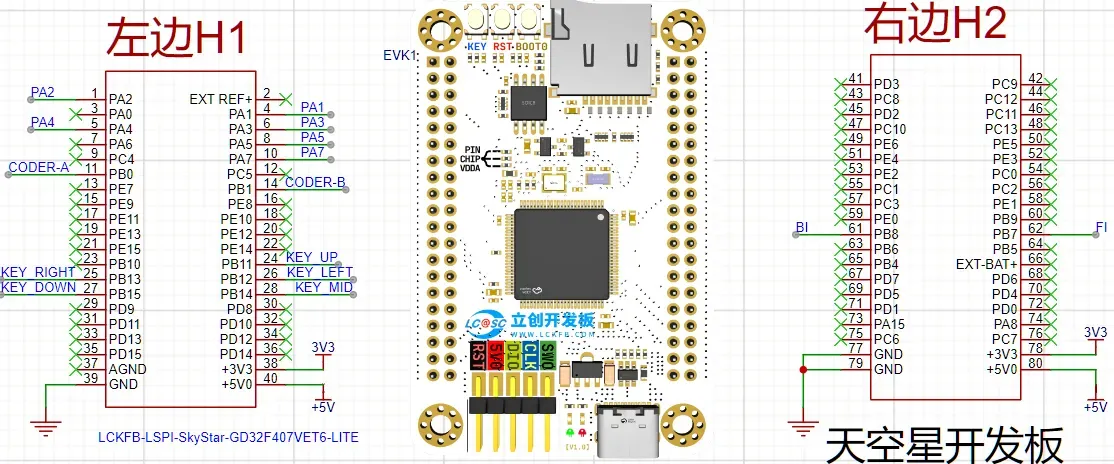
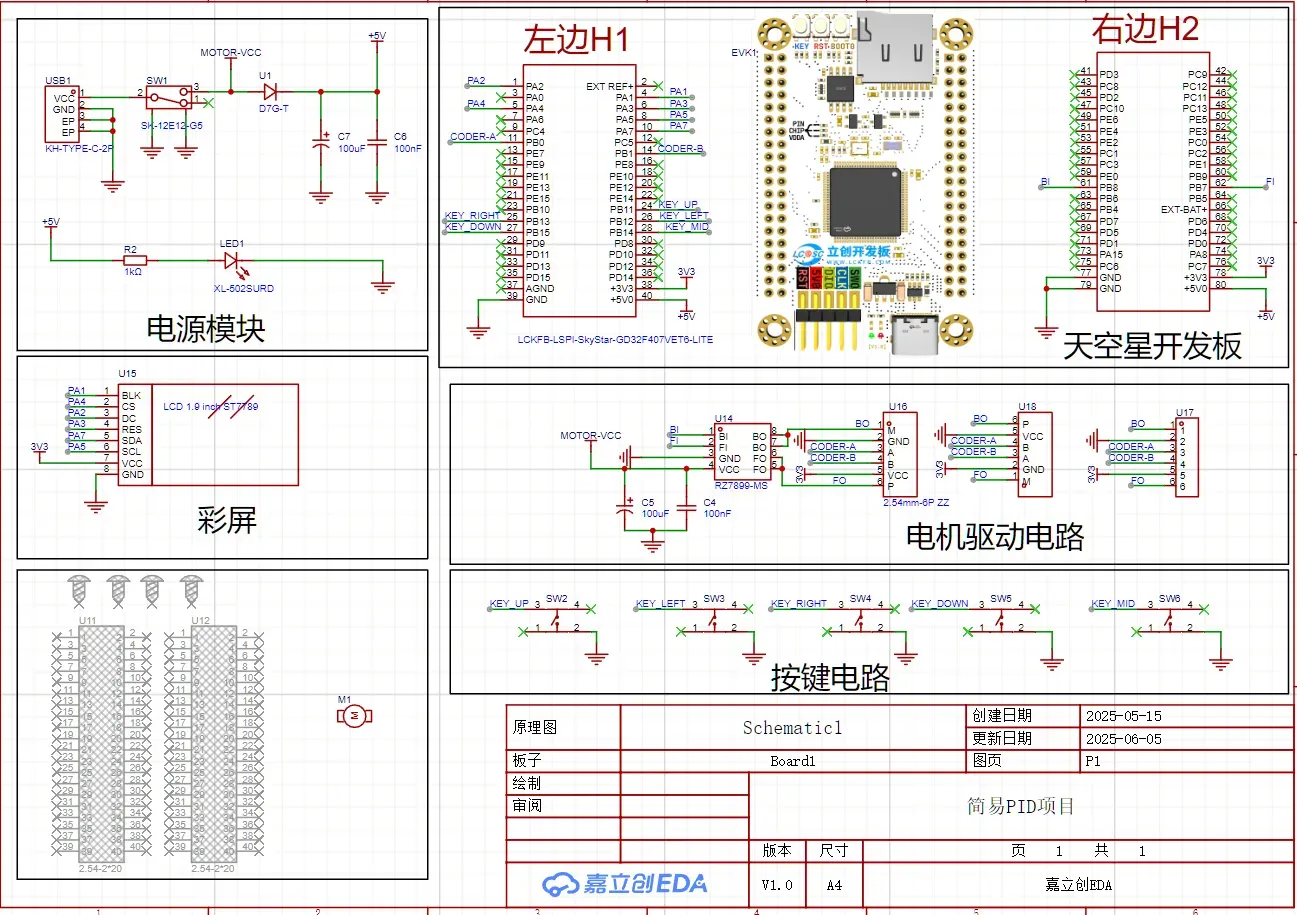
7.系统总原理图
该项目系统原理图如图所示
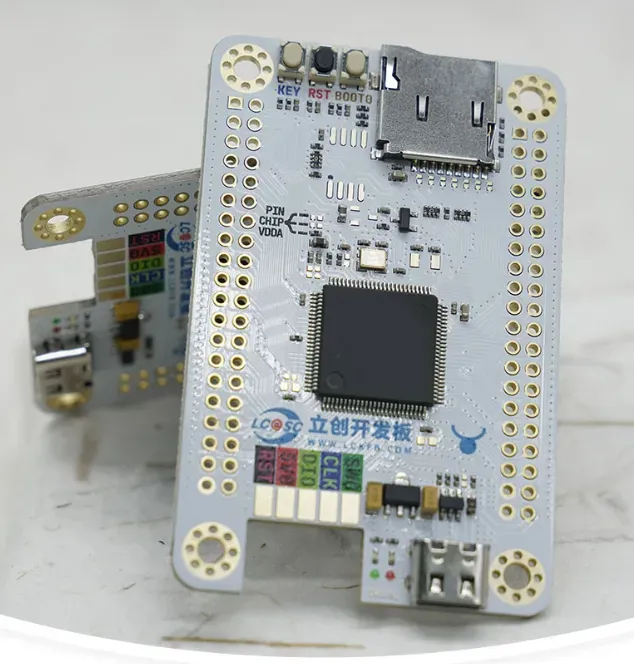
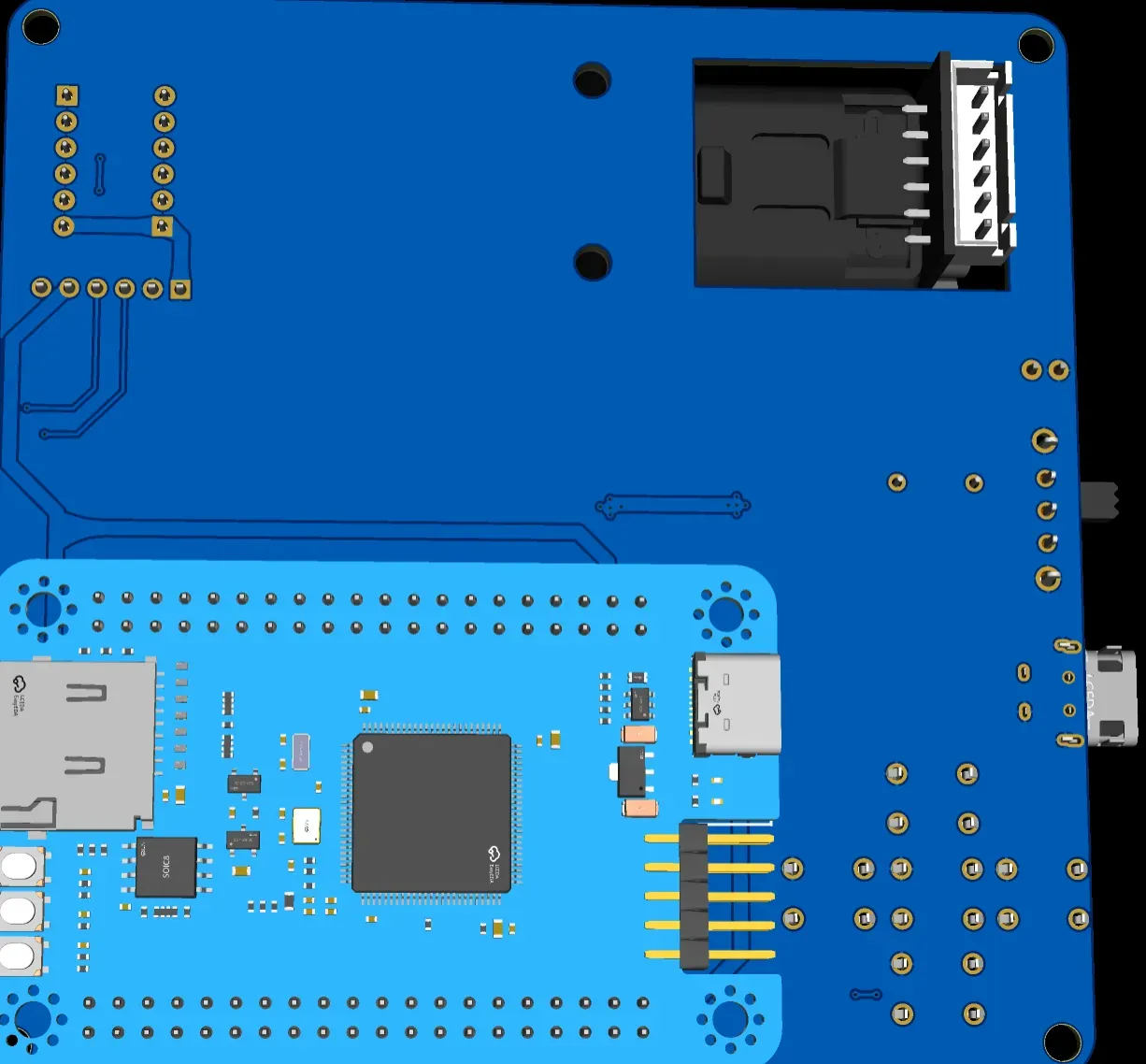
8.3D预览
天空星(原理图用的是GD32天空星但封装是和STM32共用的)
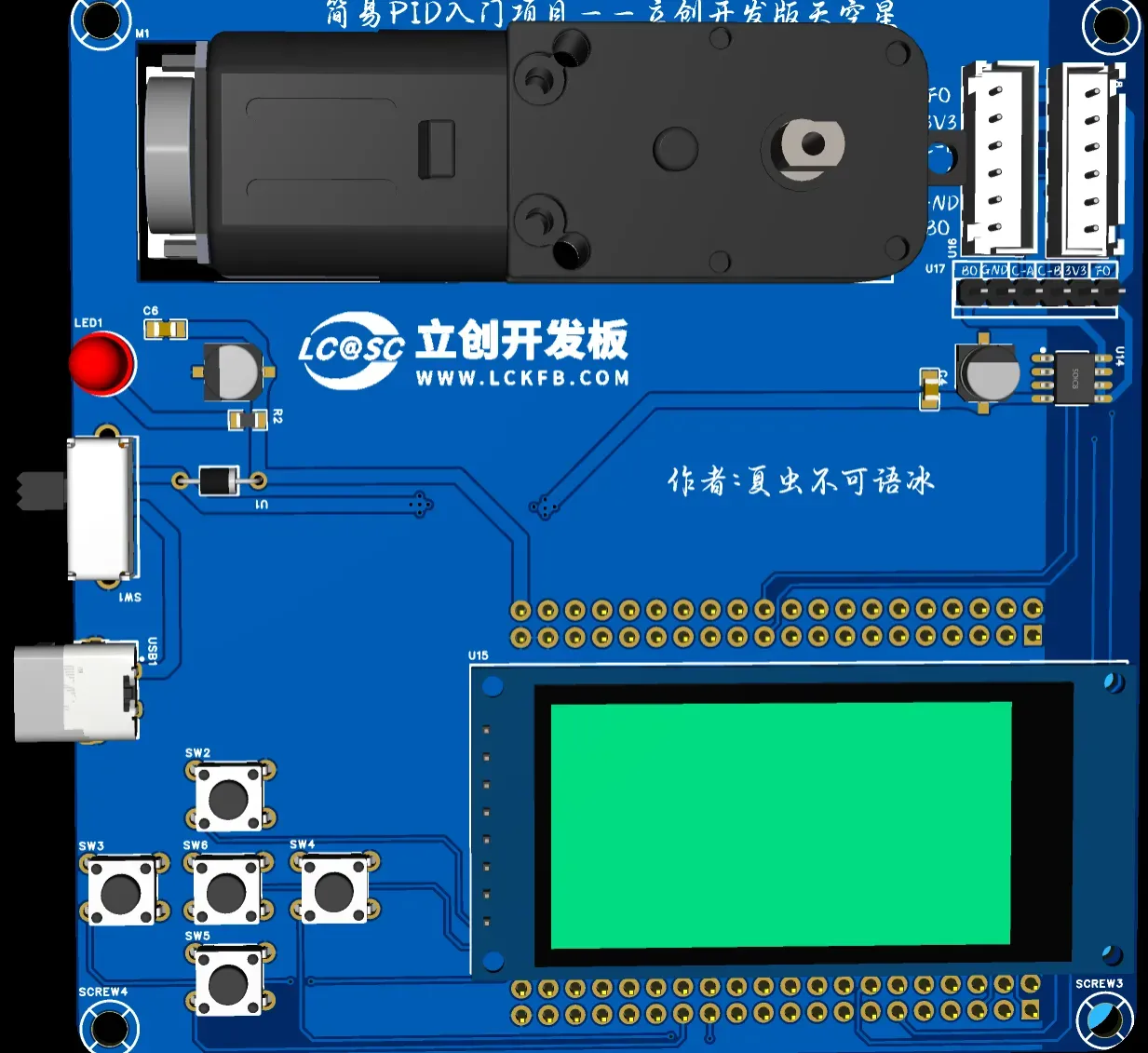
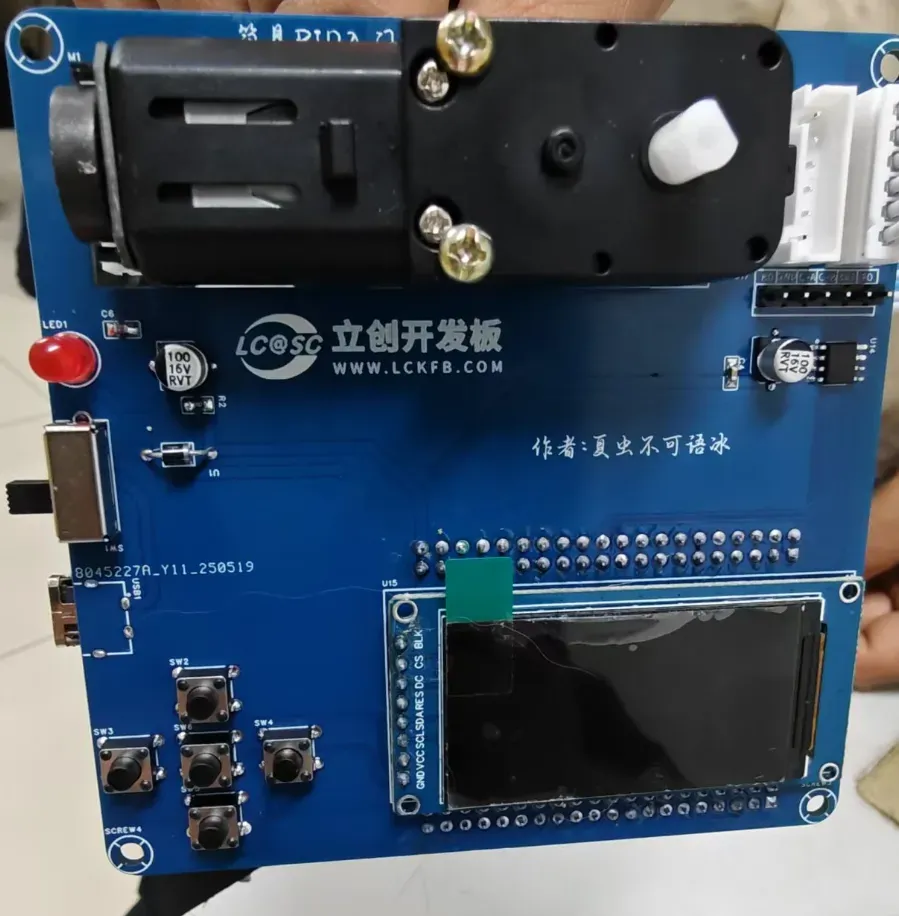
9.实物图
二、软件电路介绍
PID的应用公式
PID_OUT = (Kp x 误差)+ (Ki x 累计误差)+(Kd x 误差间的差值)三、程序下载以及相关资料
1.确保keil5要有相应芯片的支持包,链接给出
天空星:https://www.keil.arm.com/packs/stm32f4xx_dfp-keil/boards/
2.使用DAP link进行程序下载
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









