


25年电赛E题小车方案
简介
25年电赛E题小车方案
简介:25年电赛E题小车方案开源协议
:CC BY 3.0
描述
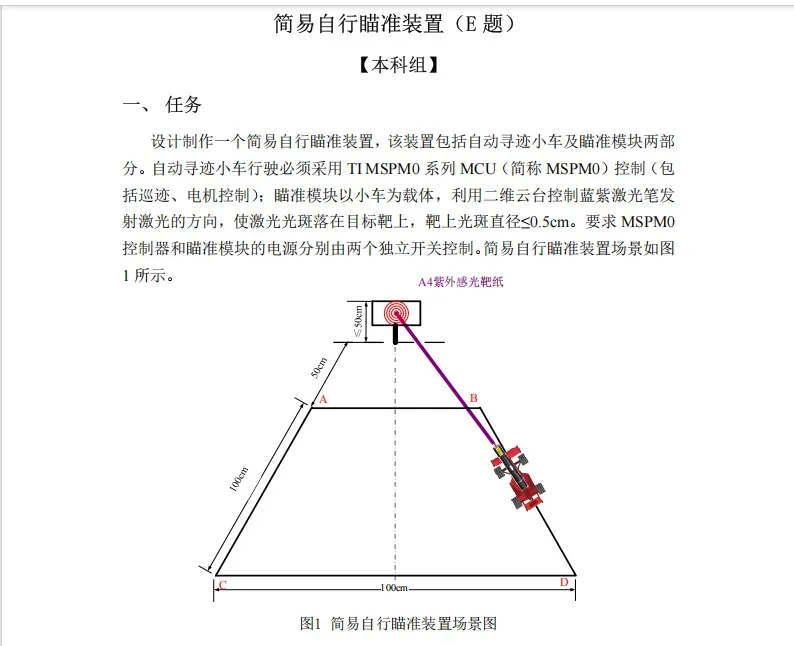
##一、题目要求
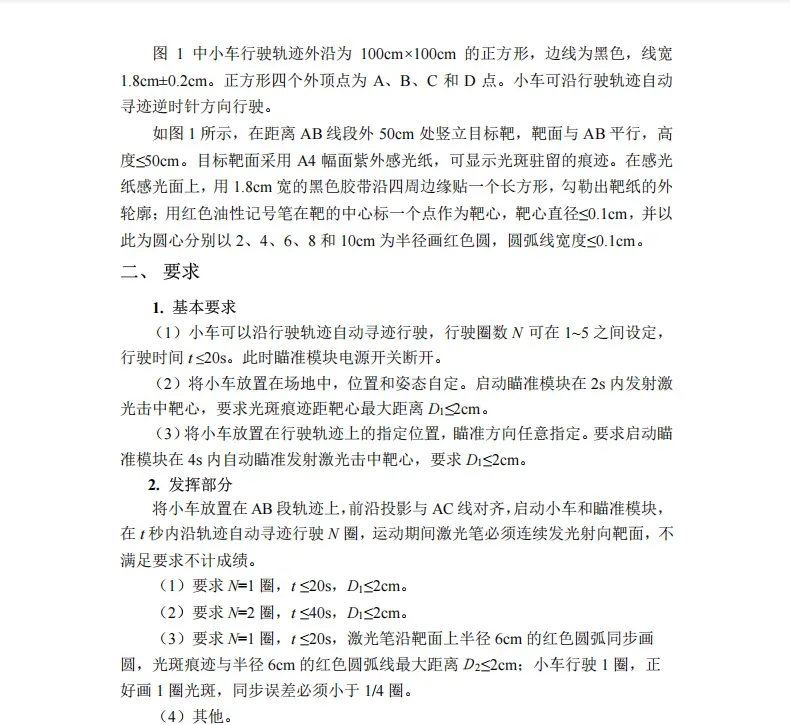
二、设计摘要
本系统基于简易自动瞄准装置,开发了一款融合动态路径追踪与实时目标锁定功能的自主移动平台。运动控制由MSPM0G3507微处理器驱动高精度编码电机,并结合12路阵列式灰度传感器,通过自适应加权算法实现路径识别,轨迹跟踪横向偏差控制在±0.5cm以内,视觉系统搭载K230视觉模块与二自由度步进电机云台,可在3.5秒内完成靶标检测与瞄准校准。实验表明,系统在静态场景下激光光斑与靶心偏差≤2cm,验证了系统的稳定性和实时性。
关键词:MSPM0G3507;视觉系统;自适应加权算法;自动瞄准
三、题目分析
今年的难度是把23年云台和24年小车相结合,且尺寸限制比较极限,同时有对于控制精度有所要求,这就不得不上步进电机或者无刷电机的矢量控制,由于我们没有提前准备无刷电机,只准备了步进电机,也刚好步进电机能实现高精度的控制,但是对于这个小车的尺寸限制是比较苛刻的,导致我们在4天3夜的短时间内是设计上有很多的局限性,也有一些干涉,但是好在最后都想办法解决了,说完结构之后就是视觉和云台的控制,对这两方面的压力也挺大的,我们使用K230进行视觉识别,且要在云台旋转过程中精准的识别到目标靶且定位,无疑是对视觉和云台控制的处理能力的重大考验。同时我们步进电机是使用G3507+AS5600磁编码进行闭环控制的,这样能让控制精度达到质的飞越。
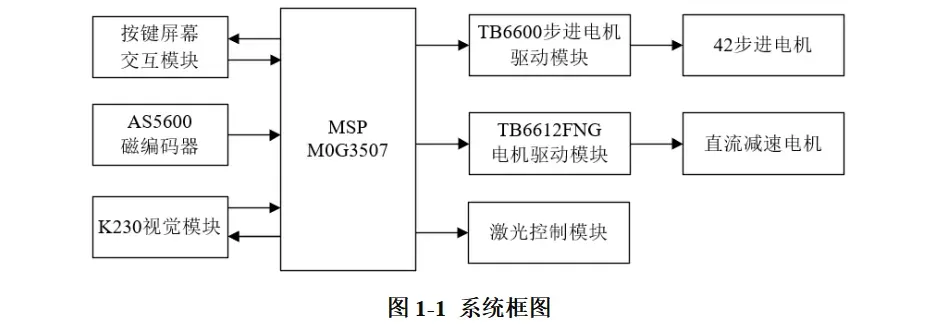
五、总体设计框图
提示:总体设计方案框图
例:
六、硬件电路组成
我们的所用的主控拓展板是我自己制作的,
1.可以看看工程里面,这块拓展板是基于立创天猛星G3507最小核心板所进行拓扑设计的,集成了一下功能:
- 最小核心板上均有Flash;
- 支持VCC-GND-SCL-SDA/GND-VCC-SCL-SDA线序的IIC屏幕;
- 板载有高精度陀螺仪ICM42688,
- 板载了4路电源,树莓派供电是5V16A的中兴ZXDN16S1205,电机红和舵机还有主控都是独立的TPS5430,均支持调压;
- 板子预留了三路串口,两路IIC,且预留了两路NMOS和两路舵机,都接了定时器通道,其中两路NMOS支持单向电机调速,可外接气泵,电磁铁等大功率负载,均支持PWM调速。
- 且板载了两路电机驱动(TB6612)在板子背面,可直接使用XH2.54接线端子直接插编码器电机,其中电机供电电压支持调节,以应对不同型号的电机。
2.步进电机驱动是使用成品的TB6600步进电机驱动模块,由于只准备了工业版本的tb6600驱动,体积巨大,更是让我们小车空间更加极限。
其中的步进电机减速器是赛前就设计好了的,可以看看我哔站,当时准备了两套方案,一个就是步进电机+1:3的减速器,另一个是舵机+1:3的减速器,两个精度都挺不错的,但是今年赛题要求需要旋转360度以上,我们手头没有360度的舵机,只能使用步进电机+1:3减速器了
所有的源文件我都放在了附件里面,有需要的自取
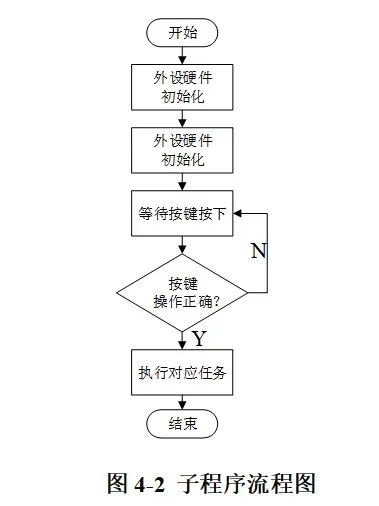
七、程序流程图
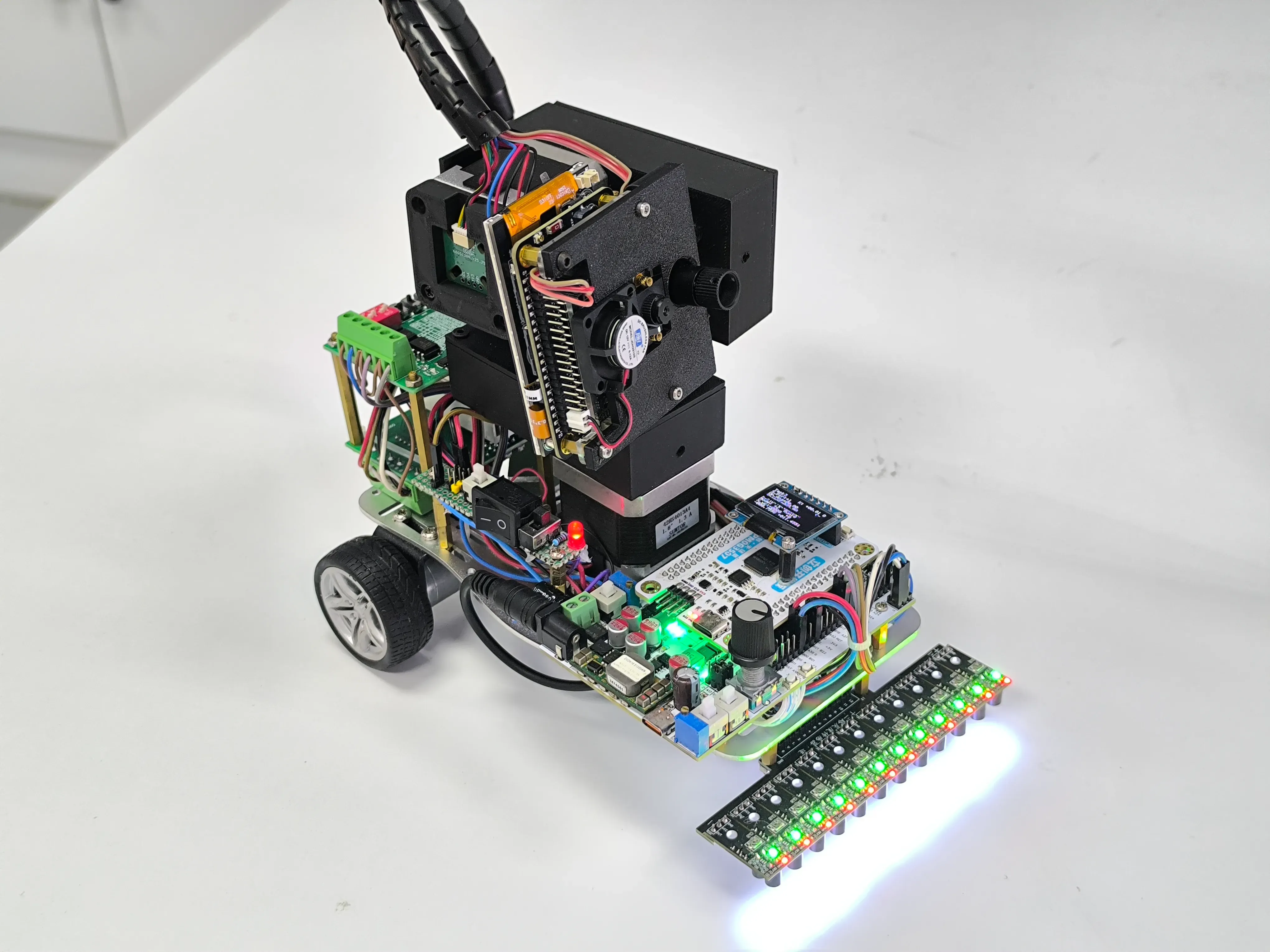
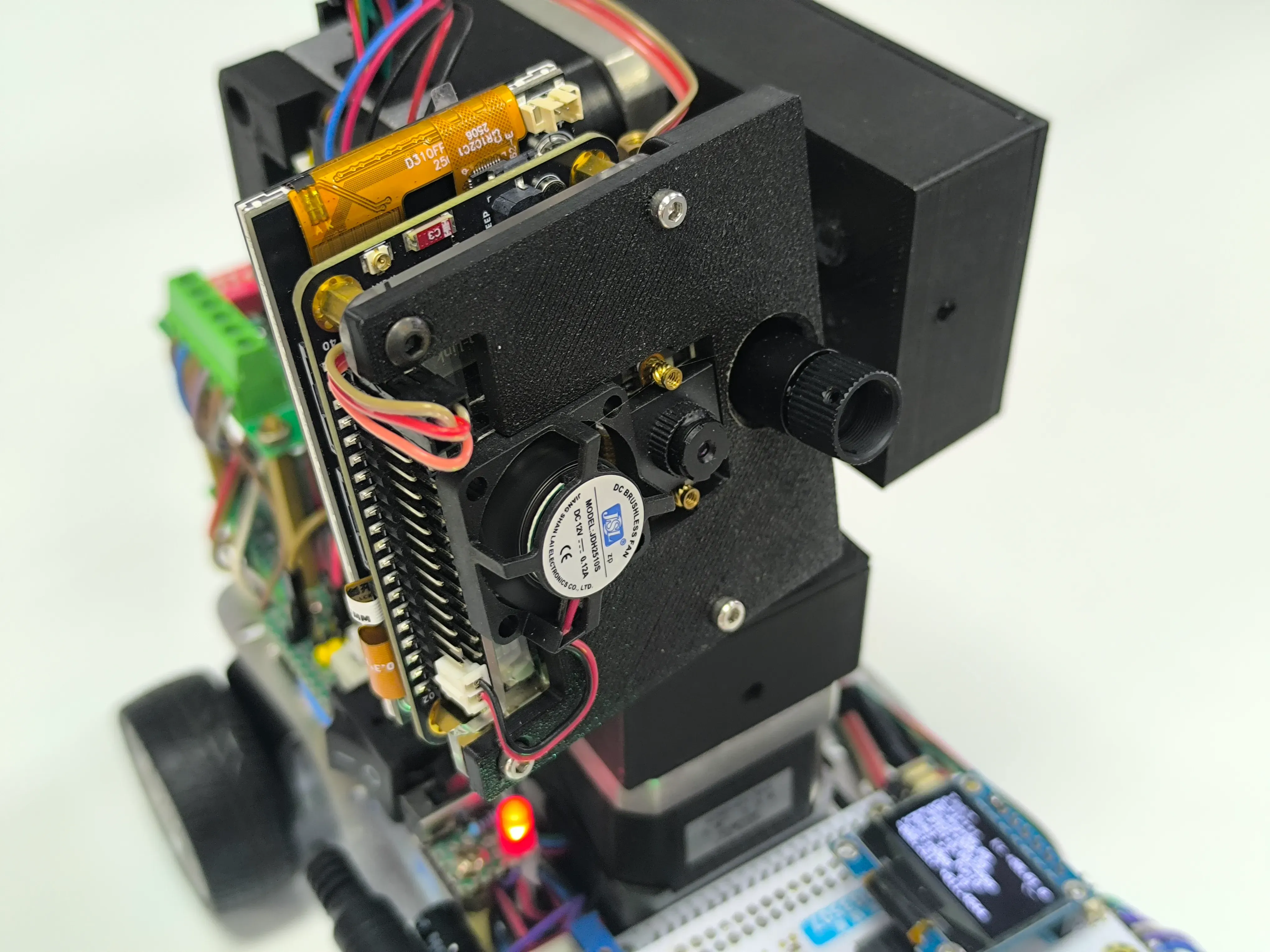
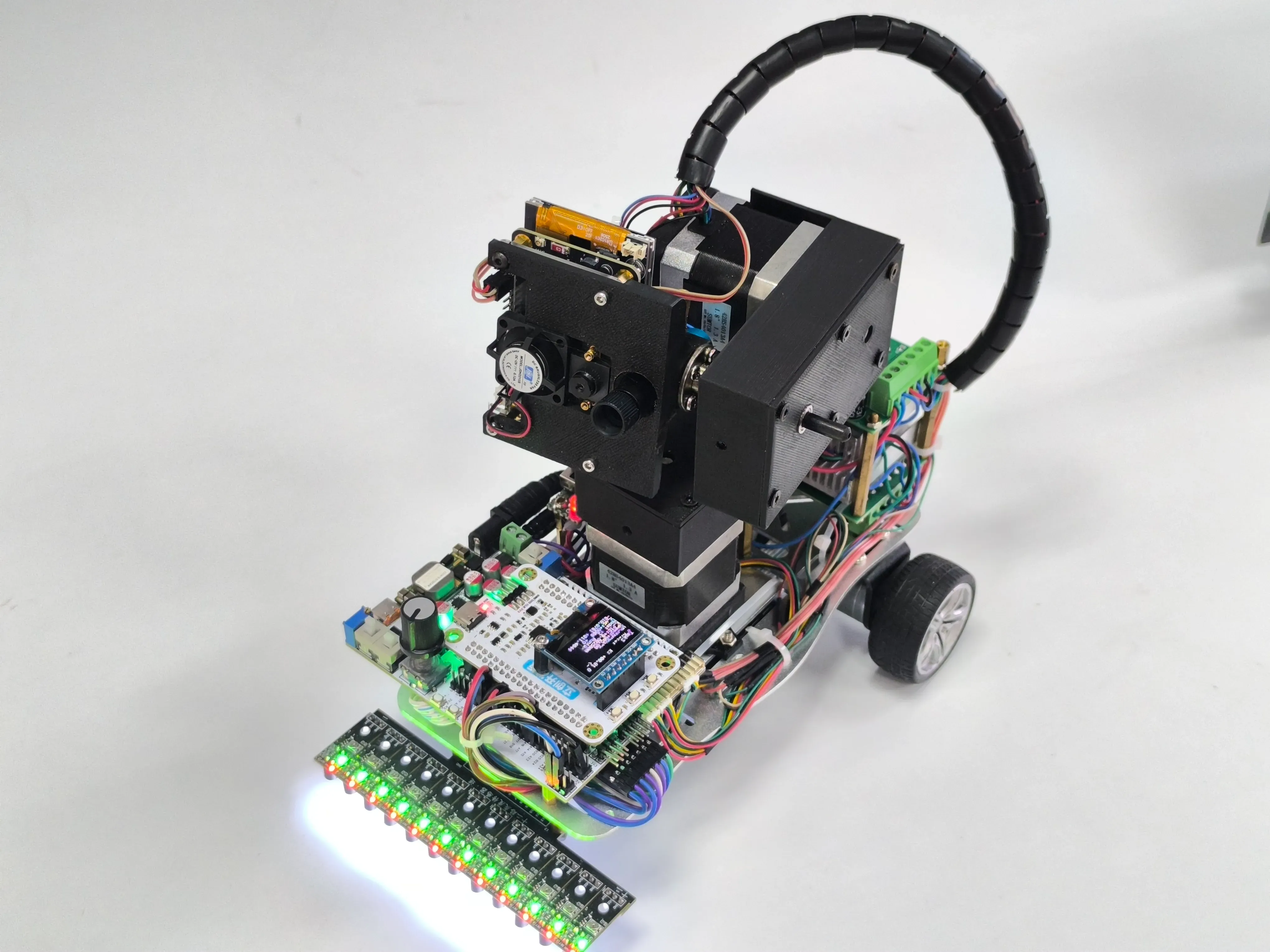
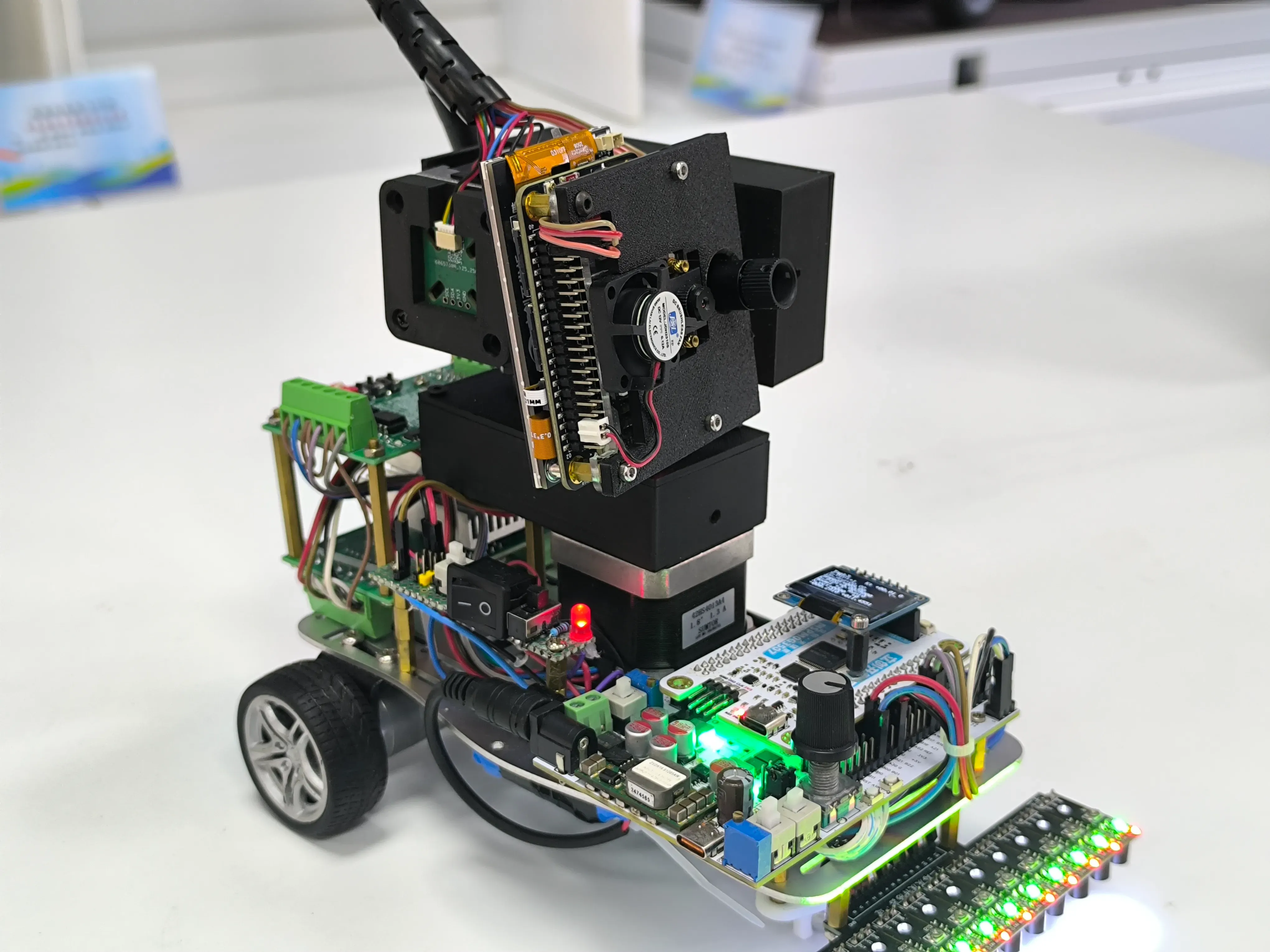
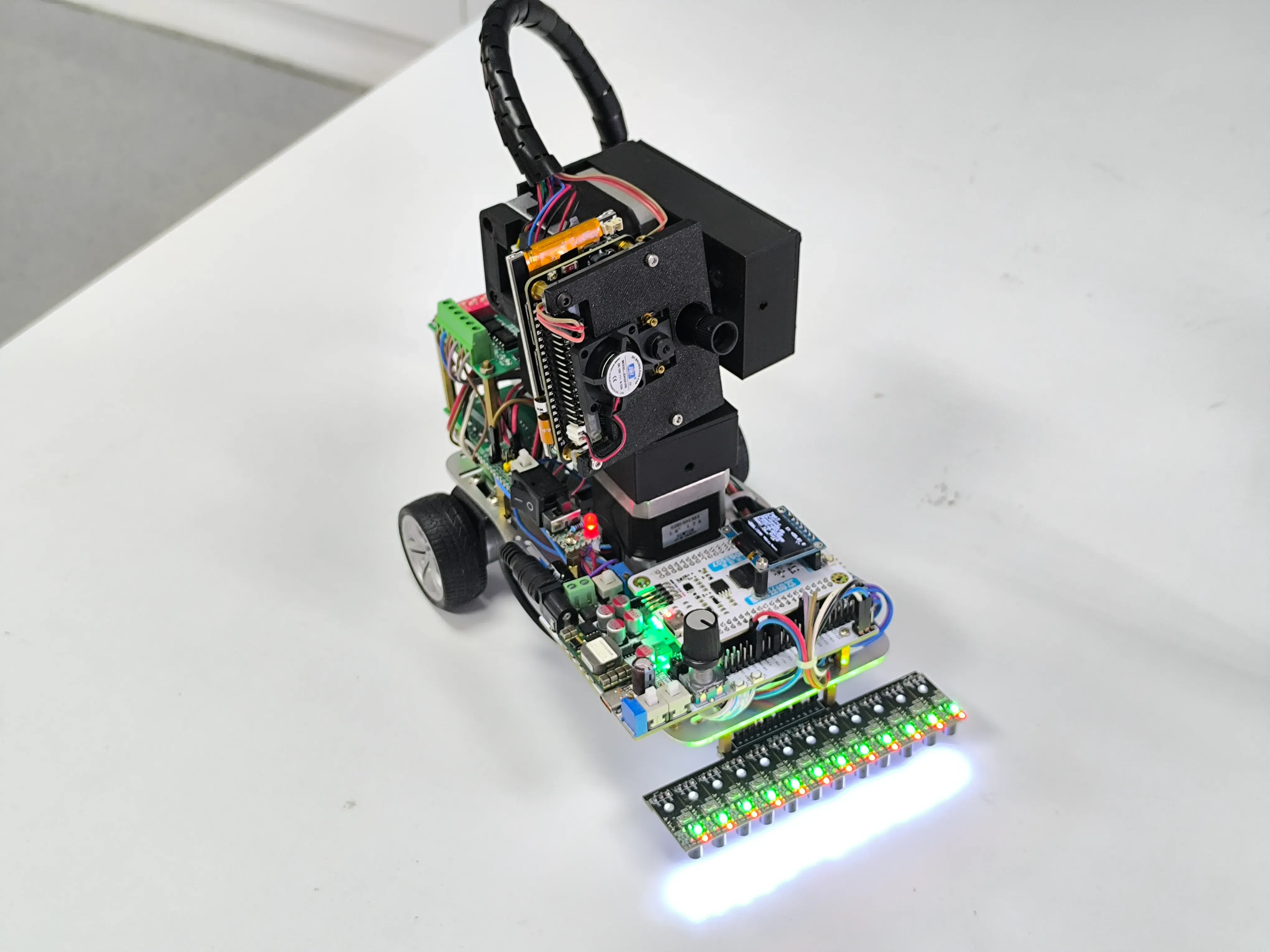
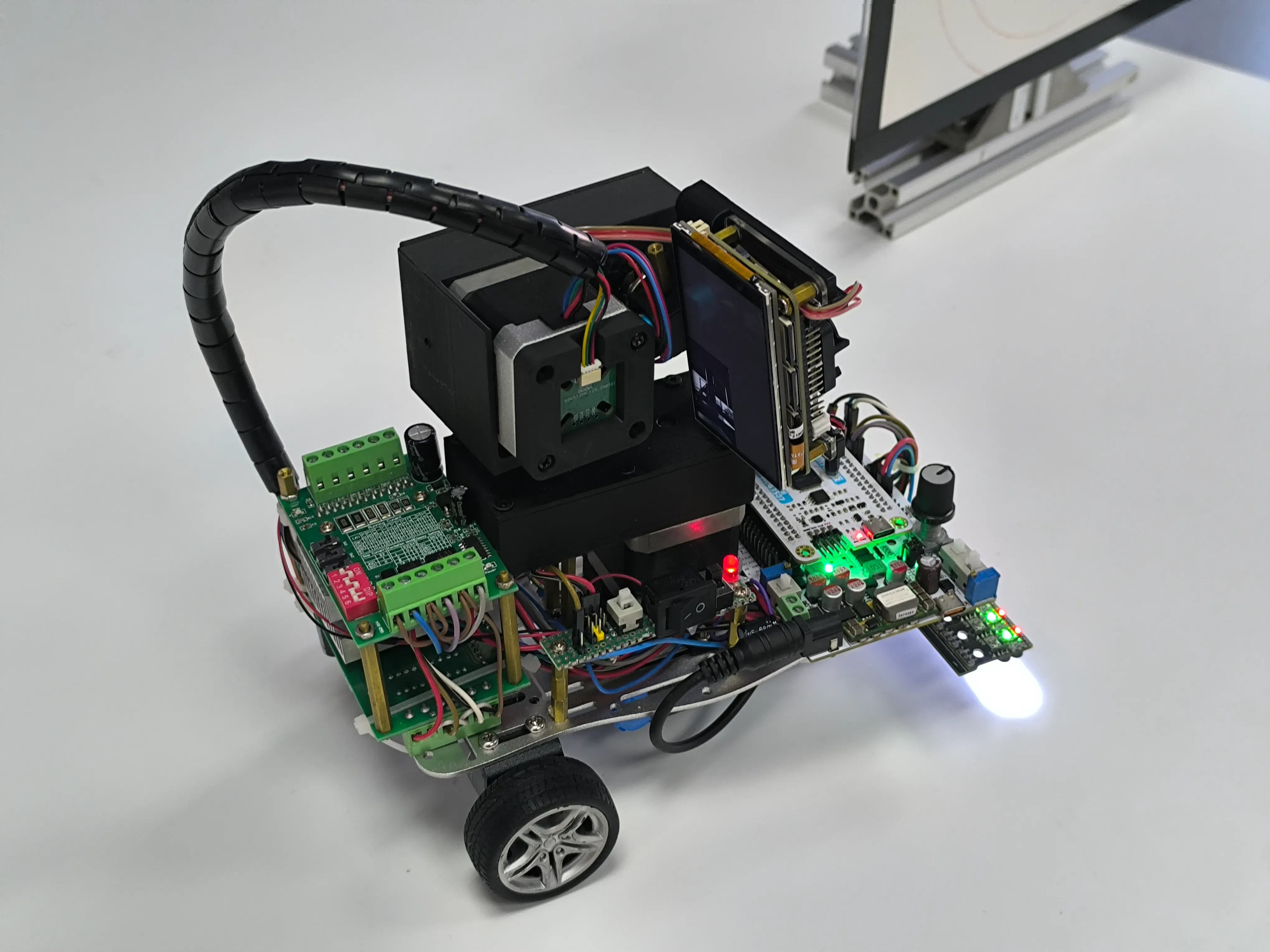
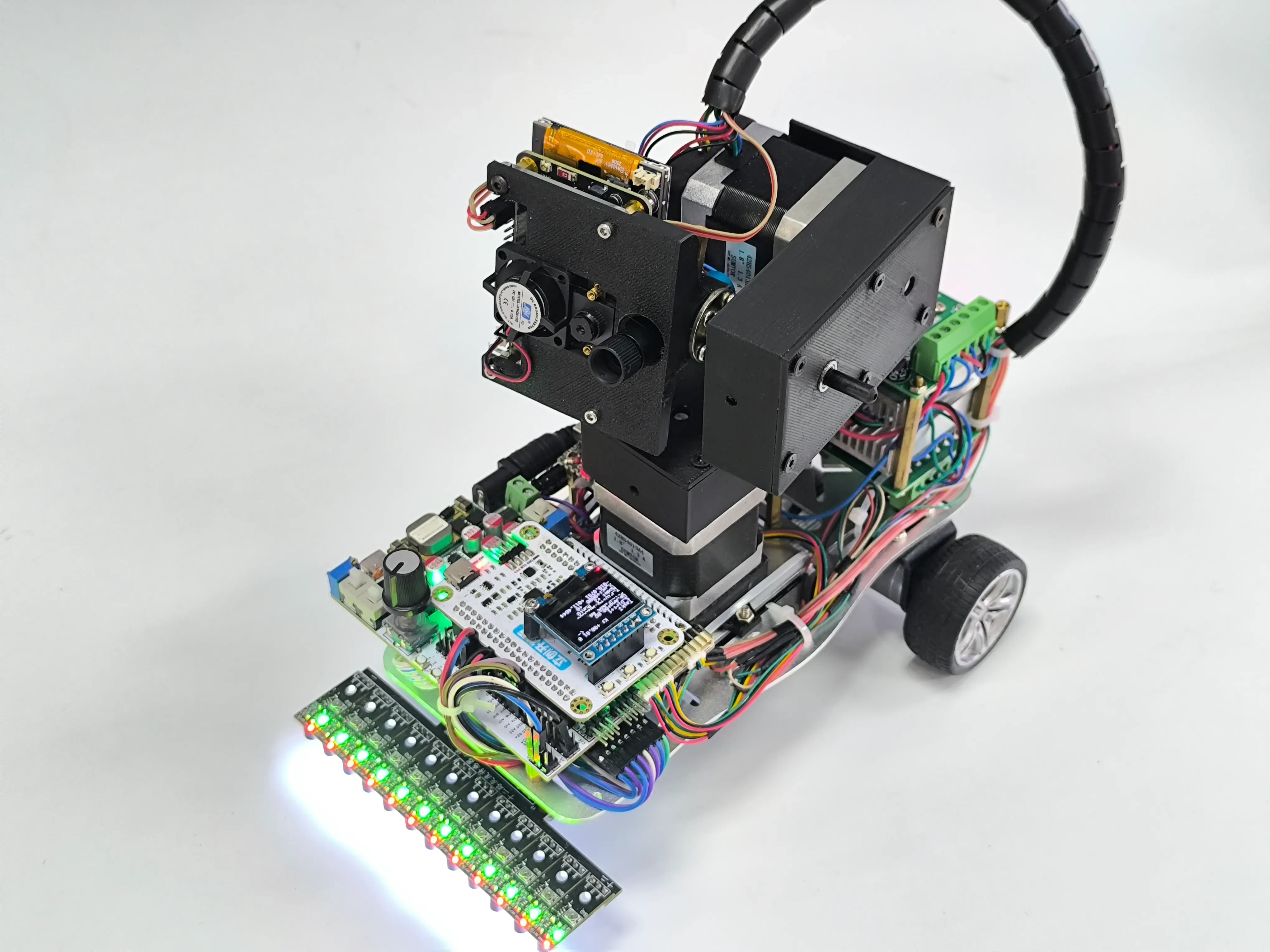
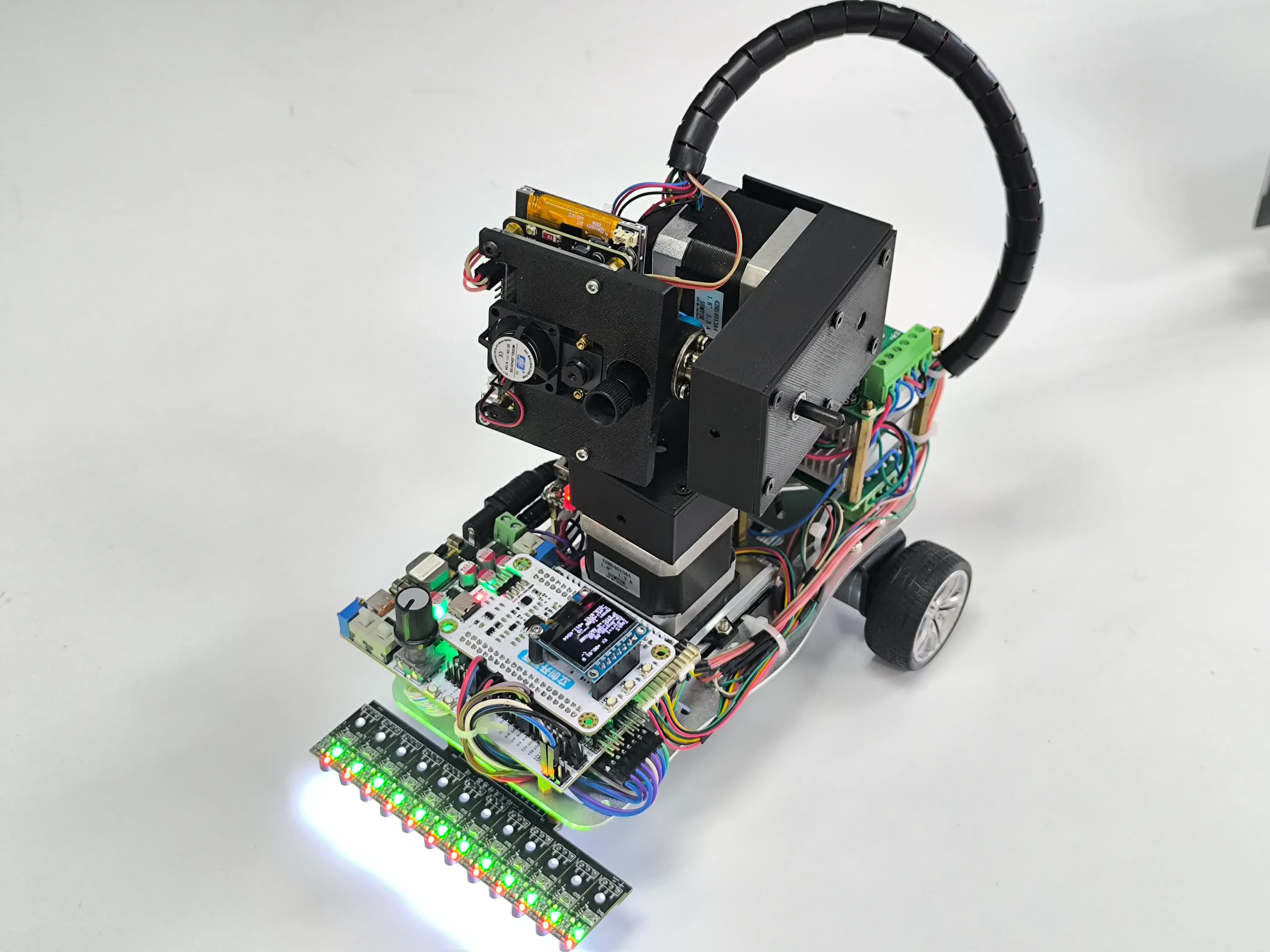
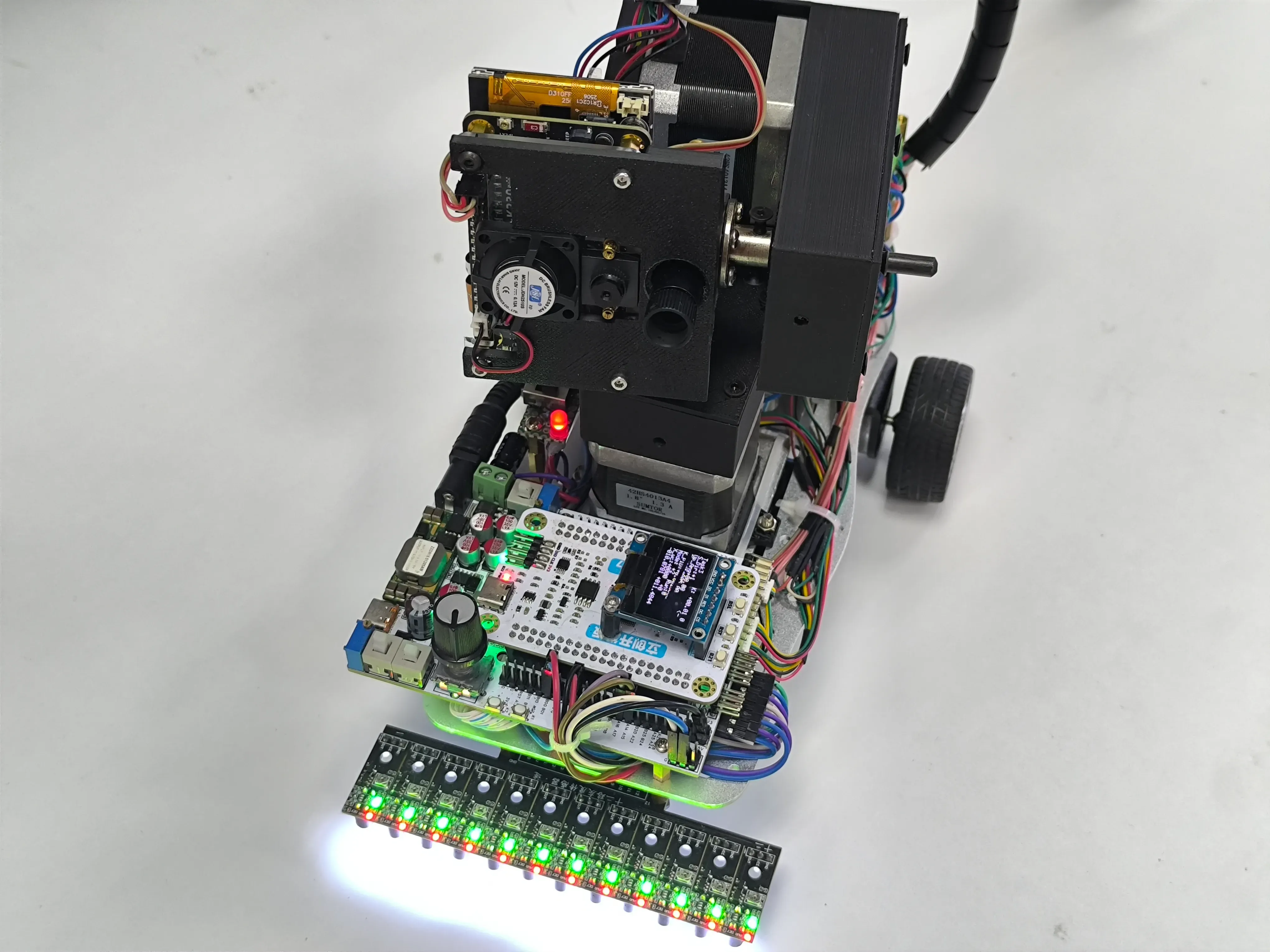
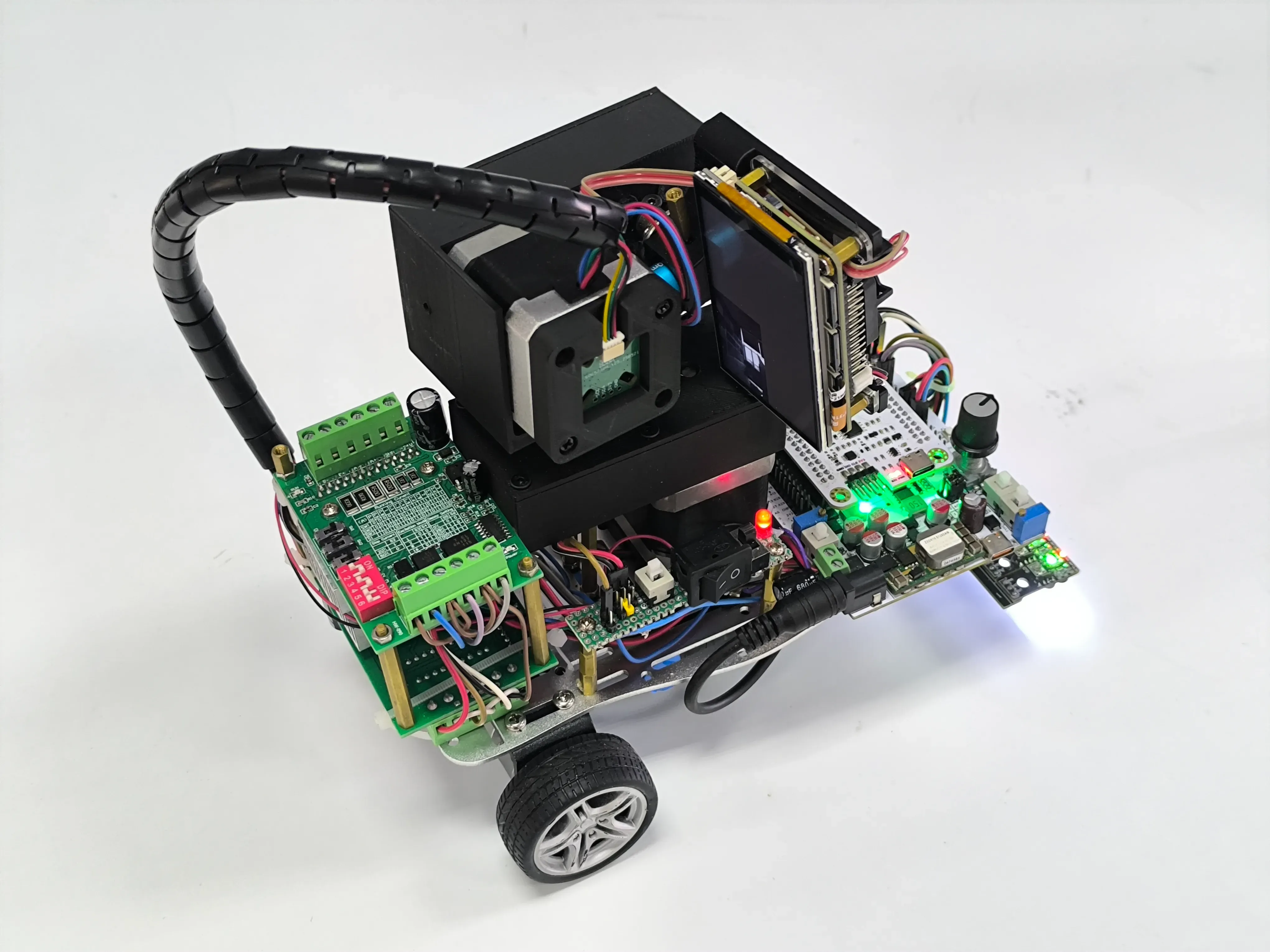
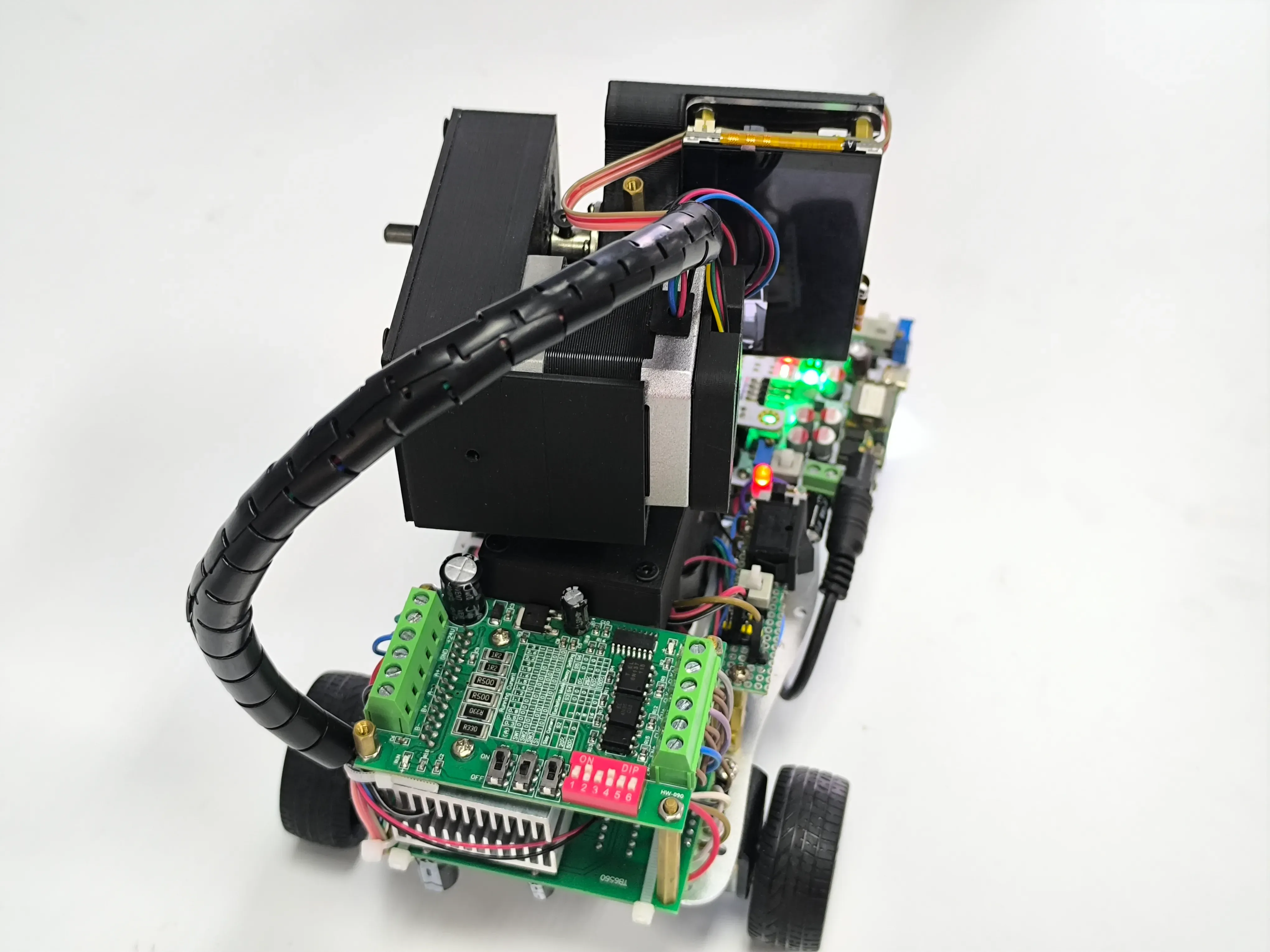
八、实物展示
九、演示视频
视频在这:https://www.bilibili.com/video/BV1ZeemzPEmc/?spm_id_from=333.1387.homepage.video_card.click
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









