


基于立创GD32VW553的四轴飞行器
简介
本工程以 GD32VW553 开发板为核心,通过PCB 机架、720 空心杯电机、MPU6050 传感器,蓝牙手机遥控以及姿态融合与 PID 算法实现稳定飞行。
简介:本工程以 GD32VW553 开发板为核心,通过PCB 机架、720 空心杯电机、MPU6050 传感器,蓝牙手机遥控以及姿态融合与 PID 算法实现稳定飞行。开源协议
:GPL 3.0
描述
项目简介
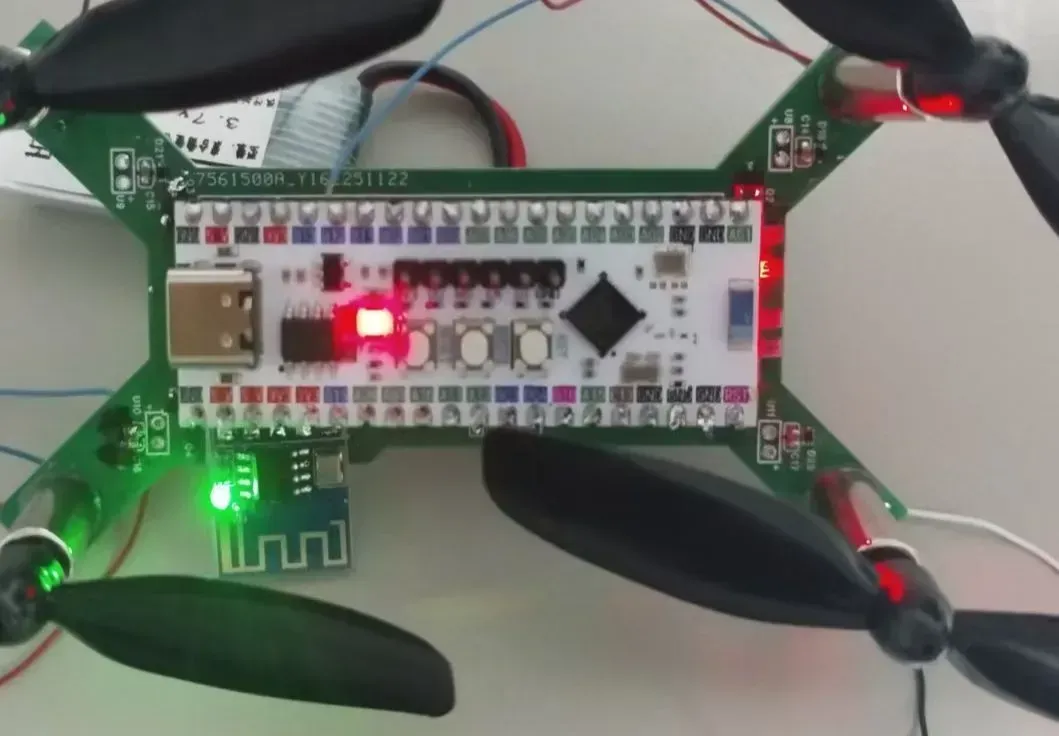
本项目是基于 GD32VW553 开发板搭建的迷你四轴飞行器,面向入门级开发需求。硬件以 PCB 为机架,集成 720 空心杯电机、MPU6050 传感器与蓝牙模块;软件通过姿态融合、PID 控制算法实现稳定飞行与手机遥控,整体兼顾低成本、轻量化与实用性,助力开发者掌握四轴控制核心技术。
项目功能
稳定飞行:依托 MPU6050 采集姿态数据,经姿态融合与 PID 控制算法,实现悬停、升降及方向变换,抵消干扰保持平稳。
无线遥控:通过蓝牙模块连接手机,实时响应操控指令,满足短距离入门场景下的飞行控制需求。
系统校准:具备陀螺仪零偏与加速度计自动校准功能,搭配滤波技术降低振动干扰,提升姿态检测精度。
轻量化运行:PCB 机架集成组件,720 空心杯电机提供适配升力,结构紧凑且保障稳定飞行。
项目参数
一、硬件参数
主控开发板:立创·GD32VW553开发板, 拥有4MB的Flash及320KBSRAM,最高160MHz主频
传感器:MPU6050,6 轴(3 轴陀螺仪 + 3 轴加速度计),测量范围 ±2000°/s(陀螺仪)、±2g(加速度计)
无线模块:蓝牙 VG6328A-MS,工作频率2402~2480MHz,通信距离 20-60m(空旷环境)
电源:3.7V 650mAh 锂电池,续航约 8-12 分钟
机架尺寸:PCB 机架,对角线长度约 81mm,整机重量≤50g
二、软件参数
控制算法:互补滤波(姿态融合)、位置式 PID 控制,控制频率 100Hz
校准功能:支持陀螺仪零偏校准、加速度计水平校准,校准精度 ±0.5°
调试接口:UART 串口(波特率 115200bps),支持参数在线修改与日志输出
三、性能参数
飞行能力:最大上升速度 0.5m/s,悬停精度 ±10cm(无风环境),支持左右 / 前后平移、原地旋转
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









