

专业版
自行车多功能行车仪
1.2k
0
0
1
简介
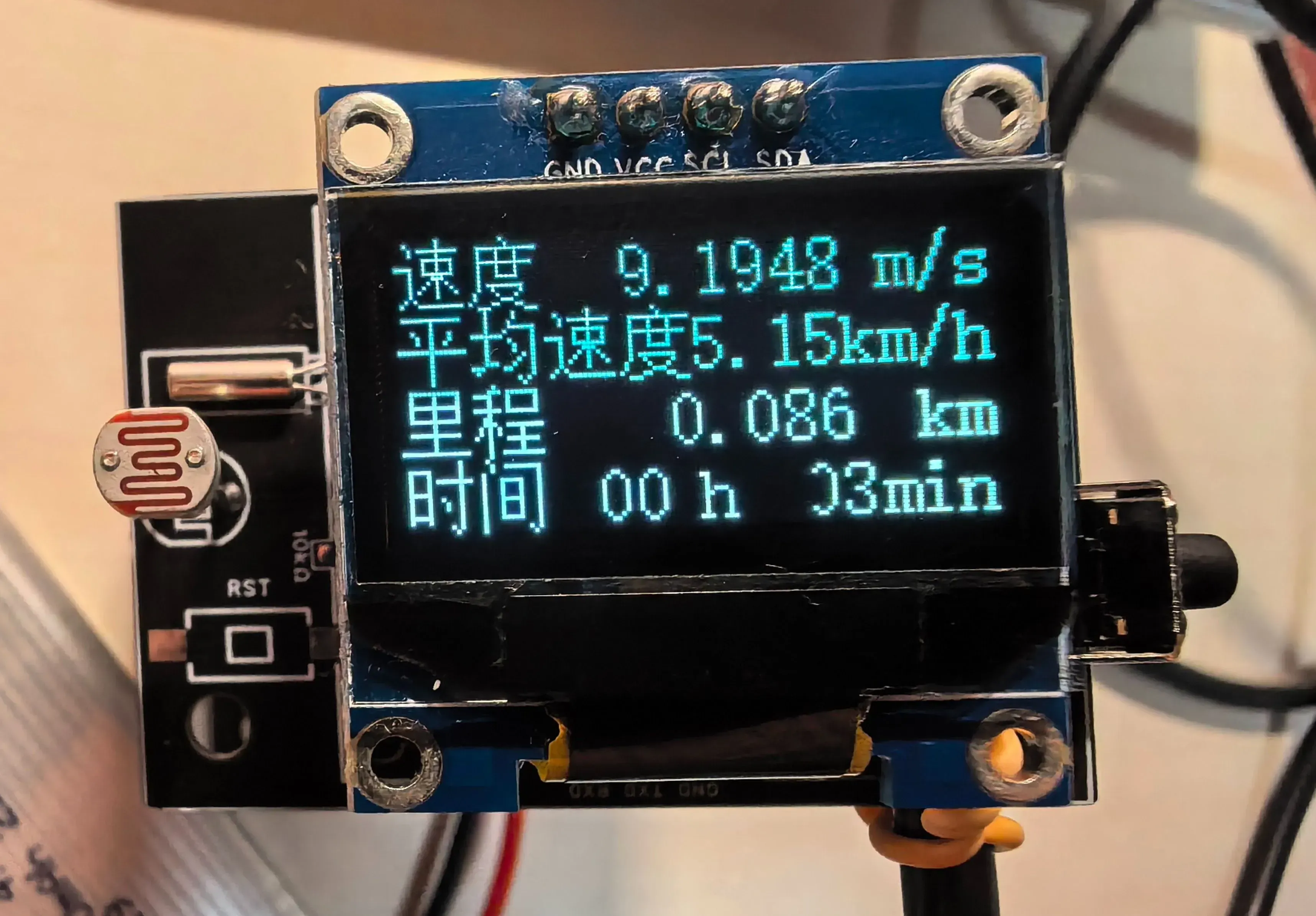
基于STC15W4K48S4单片机的多功能自行车行车仪,包含自动开关车灯,实时速度、温度、骑行时间、里程和平均速度的测量、显示等功能。百元以下,一机满足骑行爱好者要求!!
简介:基于STC15W4K48S4单片机的多功能自行车行车仪,包含自动开关车灯,实时速度、温度、骑行时间、里程和平均速度的测量、显示等功能。百元以下,一机满足骑行爱好者要求!!复刻成本:¥53
开源协议
:GPL 3.0
创建时间:2025-08-26 12:36:49更新时间:2025-12-09 00:24:33
描述
自行车行车记录仪(非录像型):
项目简介
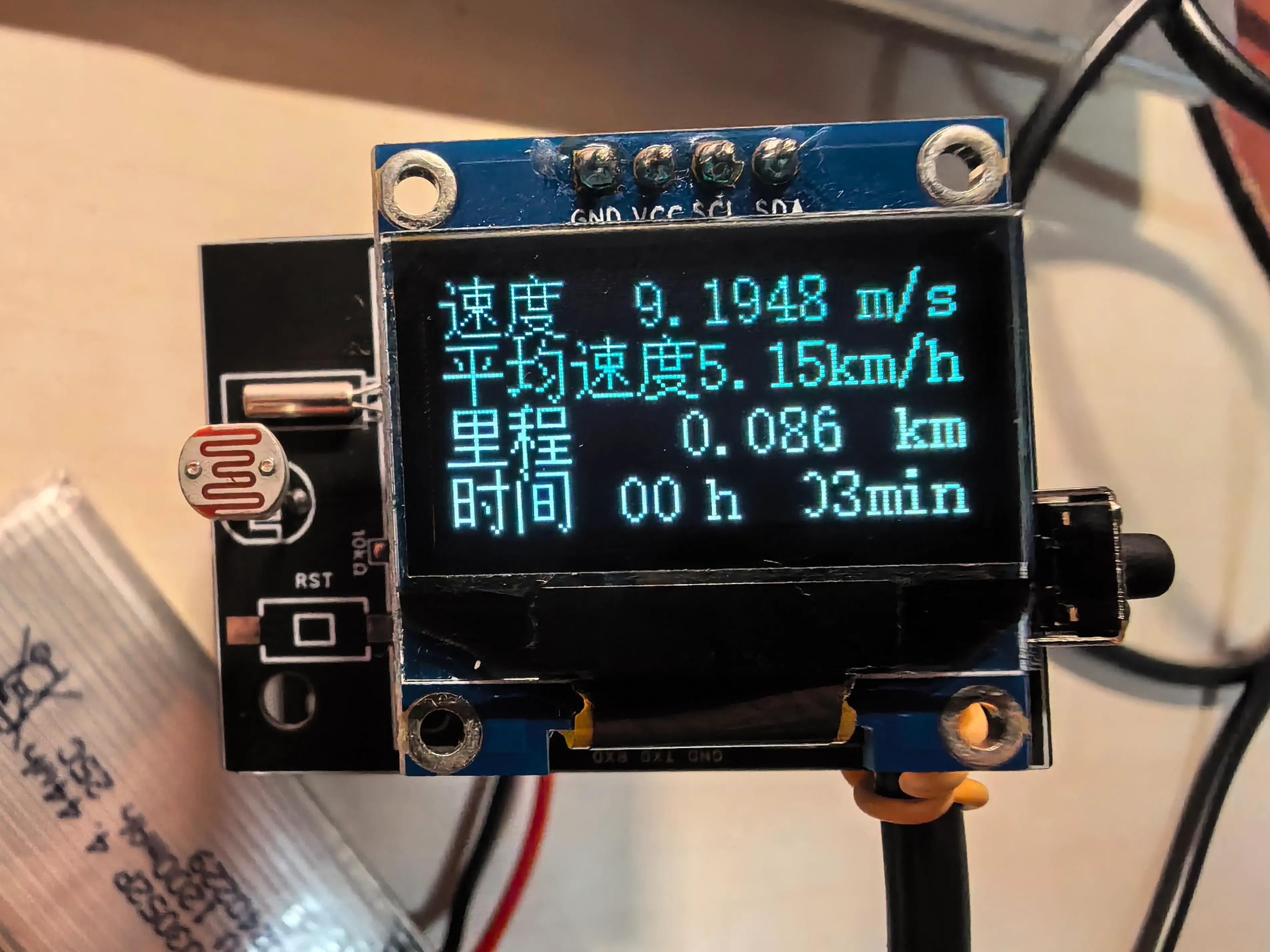
- 本项目基于STC15W4K48S4单片机,通过读取DS1302、DS18B20、光敏电阻阻值以及霍尔传感器数值,完成测量时间、平均速度、温度、夜间行车自动开关灯、速度和骑行里程等功能。
项目功能
- 通过读取DS1302获取时间,精度为分钟。读取所得时间,用于计算平均速度、每分钟切换显示骑行时长与温度。
- 通过读取DS18B20温度传感器,读取温度数值并显示。
- 通过霍尔传感器与强力磁铁的配合,使用单片机内部时钟的定时功能,车轮滚动一圈触发一次中断,计算这段时间以内自行车行驶的平均速度。
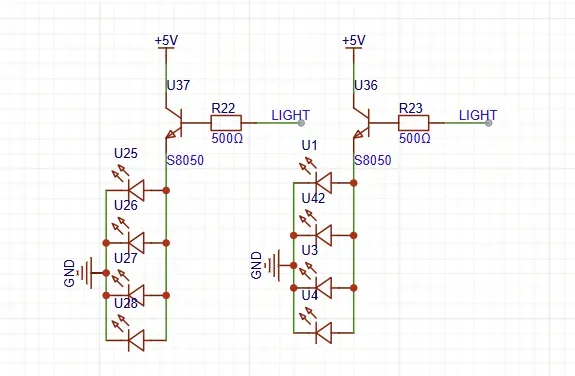
- 通过读取光敏电阻与10K电阻对电源电压分压以后的电压的ADC转换值,实现在低亮度环境下的自动开关灯。同时搭配按键开关,可以在必要时手动关闭或开启行车灯。
原理解析(硬件说明)
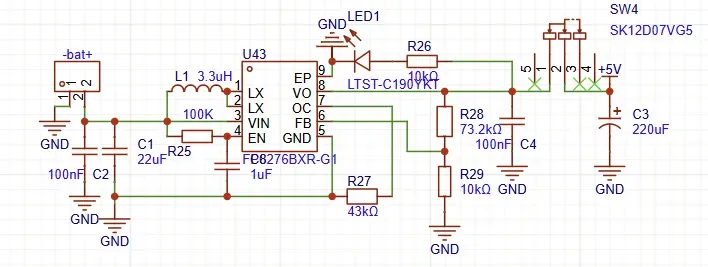
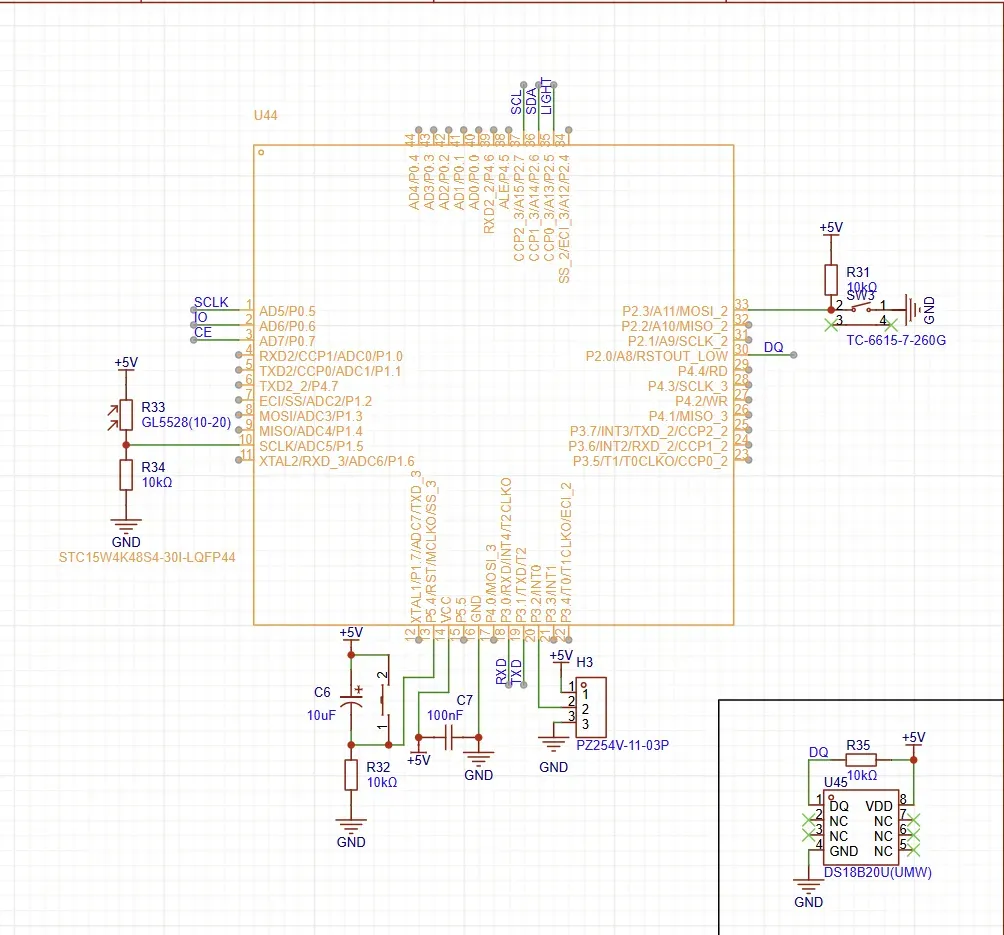
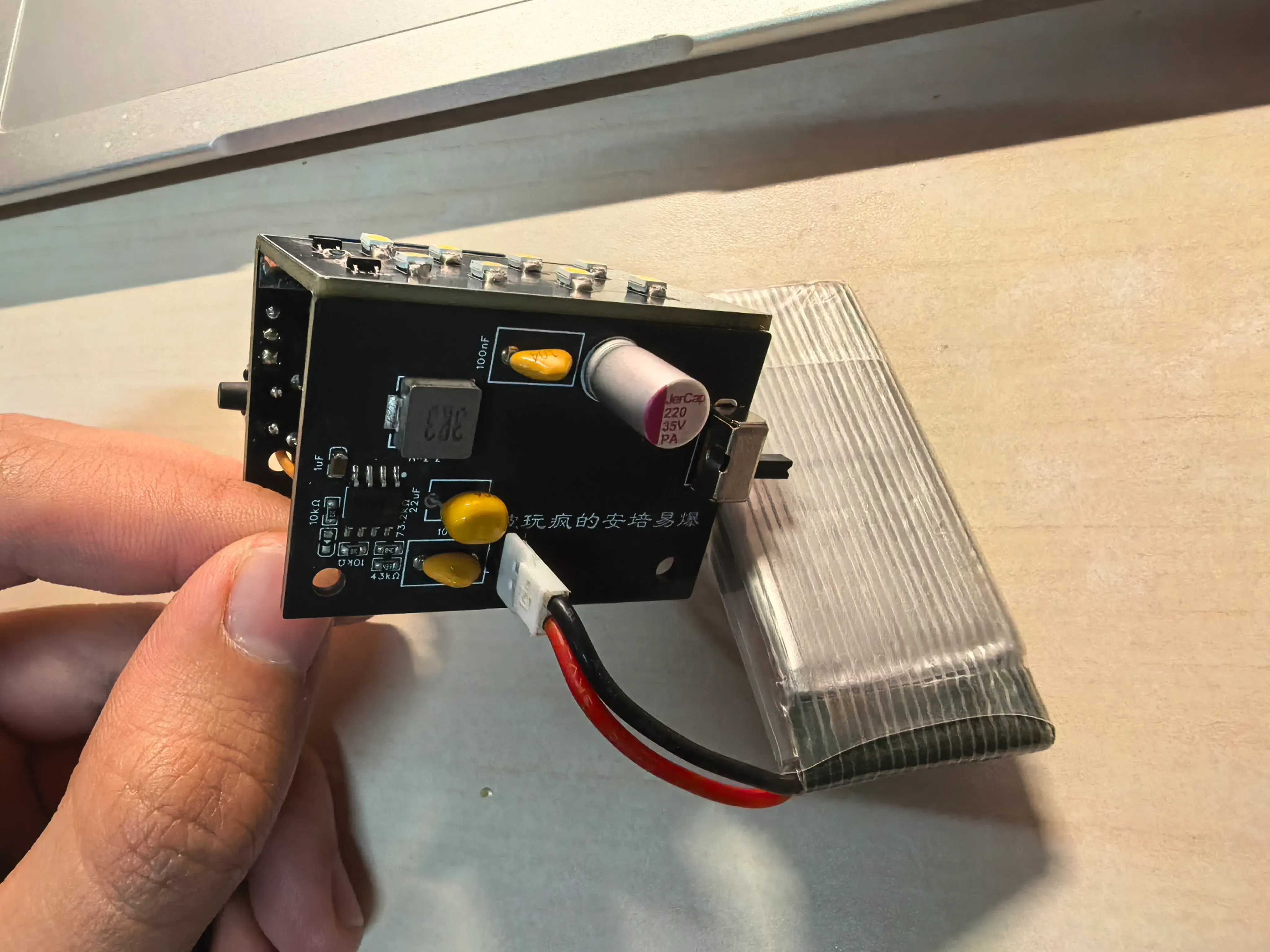
- 工程采用3.3V可充电电池供电,使用6276电源管理芯片将3.3V电池输入电压转换为5V(实测5.02V)供电电压。
- STC15W4K48S4单片机主控电路、光敏电阻ADC采样、OLED显示、按键以及DS18B20温度传感器读取电路
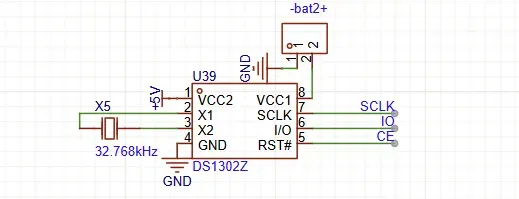
- DS1302时钟读取电路。需要十分注意选择与DS1302负载电容匹配的晶振,否则难以起振或者起振具有随机性。我选择的是6皮法的。
- 最后是亮灯控制电路。注意在此电路中需要将Light引脚配置为推挽输出模式,否则灯光亮度大为下降。
main函数部分软件代码
#include //all these codes should be used under the frequency of @12Mhz
#include
#include "DS1302.h"
#include "OLED.h"
#include "18b20.h"
#include "ADC.h"
unsigned int timeflag=0;
unsigned int turn_count=0;
unsigned int light_read = 0;
unsigned int ji = 1000;
unsigned char hour;
unsigned char minute;
float time;
float average_speed = 0.00;
float total_distance = 0.00;
double time_count=0.00;
float temperature = 0.00;
bit light_flag = 0;
bit auto_light = 0;
bit key_light = 1;
sbit T_LED = P2^3;
sbit Light = P2^5;
DS1302_time tim;
/***codes declaration***/
void IO_set(void);
void inter_set(void);
void OLED_background(void);
void speed_display(void);
void Delay1ms(void);
/*** main codes****/
void main(void){
IO_set();
InitADC();
inter_set();
DS1302_Init();
DS1302_SetTime();
OLED_Init();
OLED_CLS();
OLED_background();
speed_display();
while(1){
EA = 0;
Init_DS18B20();
temperature = ReadTemperature();
DS1302_ReadTime(&tim);
hour=tim.DS1302_Time[3];
minute=tim.DS1302_Time[4];
time=(float)hour+(float)minute/60.0;
if((minute%2) == 0){
OLED_ShowASCII(86,6," "); //six spaces
OLED_ShowChinese(64,6,9);
OLED_ShowChinese(0,6,8);
OLED_ShowChinese(16,6,9);
displayfloat(temperature,32,6,4);
}
if((minute%2) == 1){
OLED_ShowChinese(0,6,2);
OLED_ShowChinese(16,6,3);
OLED_ShowASCII(32,6," ");
OLED_ShowNum(42,6,hour/10);
OLED_ShowNum(50,6,hour%10);
OLED_ShowNum(86,6,minute/10);
OLED_ShowNum(94,6,minute%10);
OLED_ShowASCII(64,6,"h ");
OLED_ShowASCII(103,6,"min");
}
light_read = GetADC(0x05);
EA = 1;
ji = 500;
while(ji > 0){
if(light_read <= 450 && key_light){
Light = 1;
light_flag = 1;
auto_light = 1;
}
if(T_LED == 0){
Delay1ms();
Delay1ms();
if(T_LED == 0){
light_flag = !light_flag;
if(auto_light == 1){auto_light = 0; key_light = 0; Light = 0;}
else if(light_flag == 1){Light = 1;}
else if(light_flag == 0){Light = 0;}
}
while(T_LED == 0);
}
Delay1ms();
ji--;
}
}
}
/****** detail codes*****/
void Delay1ms(void) //@12.000MHz
{
unsigned char i, j;
i = 12;
j = 169;
do
{
while (--j);
} while (--i);
}
void IO_set(void){
P0M0 = 0x00; P0M1 = 0x00;
P1M0 = 0x00; P1M1 = 0x20;
P2M0 = 0x20; P2M1 = 0x00;
P3M0 = 0x00; P3M1 = 0x00;
P5M0 &= ~0xef; P5M1 &= ~0xef;
}
void inter_set(void){
Light=0;
EX0=1;
ET0=1;
IT0=1;
TH0=0x00;
TL0=0x00;
AUXR &= 0x7f;
TMOD = 0x00;
TR0=0;
EA=0;
}
void OLED_background(void){
OLED_ShowChinese(0,0,0);
OLED_ShowChinese(16,0,1);
OLED_ShowChinese(0,2,6);
OLED_ShowChinese(16,2,7);
OLED_ShowChinese(32,2,0);
OLED_ShowChinese(48,2,1);
OLED_ShowChinese(0,4,4);
OLED_ShowChinese(16,4,5);
OLED_ShowChinese(0,6,8);
OLED_ShowChinese(16,6,9);
displayfloat(0.000,48,0,6);
OLED_ShowASCII(103,0,"m/s");
OLED_ShowASCII(95,2,"km/h");
OLED_ShowASCII(111,4,"km");
OLED_ShowChinese(64,6,9);
}
void speed_display(void){
if(time == 0){
OLED_ShowASCII(63,2,"0.00");
}
if(time != 0){
average_speed = ((float)turn_count/500.0)/time;
displayfloat(average_speed,63,2,4);
}
displayfloat((float)turn_count/500.0,58,4,7);
}
/**** interrupt handler************/
void INT0_ISR (void) interrupt 0
{
EA = 0;
TR0=0;
time_count=timeflag*0.065536+(double)(TH0*256+TL0)/1000000;
timeflag=0;
turn_count += 1;
if(time_count != 0){
displayfloat((float)(2.00/time_count),48,0,6);
}
speed_display();
TH0=0x00;
TL0=0x00;
TR0=1;
EA = 1;
}
void Timer0_ISR (void) interrupt 1
{
TR0=0;
timeflag=timeflag+1;
TH0=0x00;
TL0=0x00;
TR0=1;
}
仅展示main.c的代码,其余代码(驱动库和keil工程)请在附件中查看下载。
注意事项
- 本工程的所有代码均需在12Mhz的系统频率下运行,若不在此频率下,不保证代码的可靠性。如需要的话,可以更改相关的软件延时函数以及数值计算函数。
- 适配自行车时,注意本工程适配的自行车车轮滚动一圈的距离是2m。
- 时钟不起振请优先检查晶振负载电容是否匹配DS1302。
- 在自动车灯亮起以后点击按键为关闭自动车灯,且除非拔电不可恢复自动车灯。
- 未添加掉电存储功能,拔电后所有数据归零。
实物图
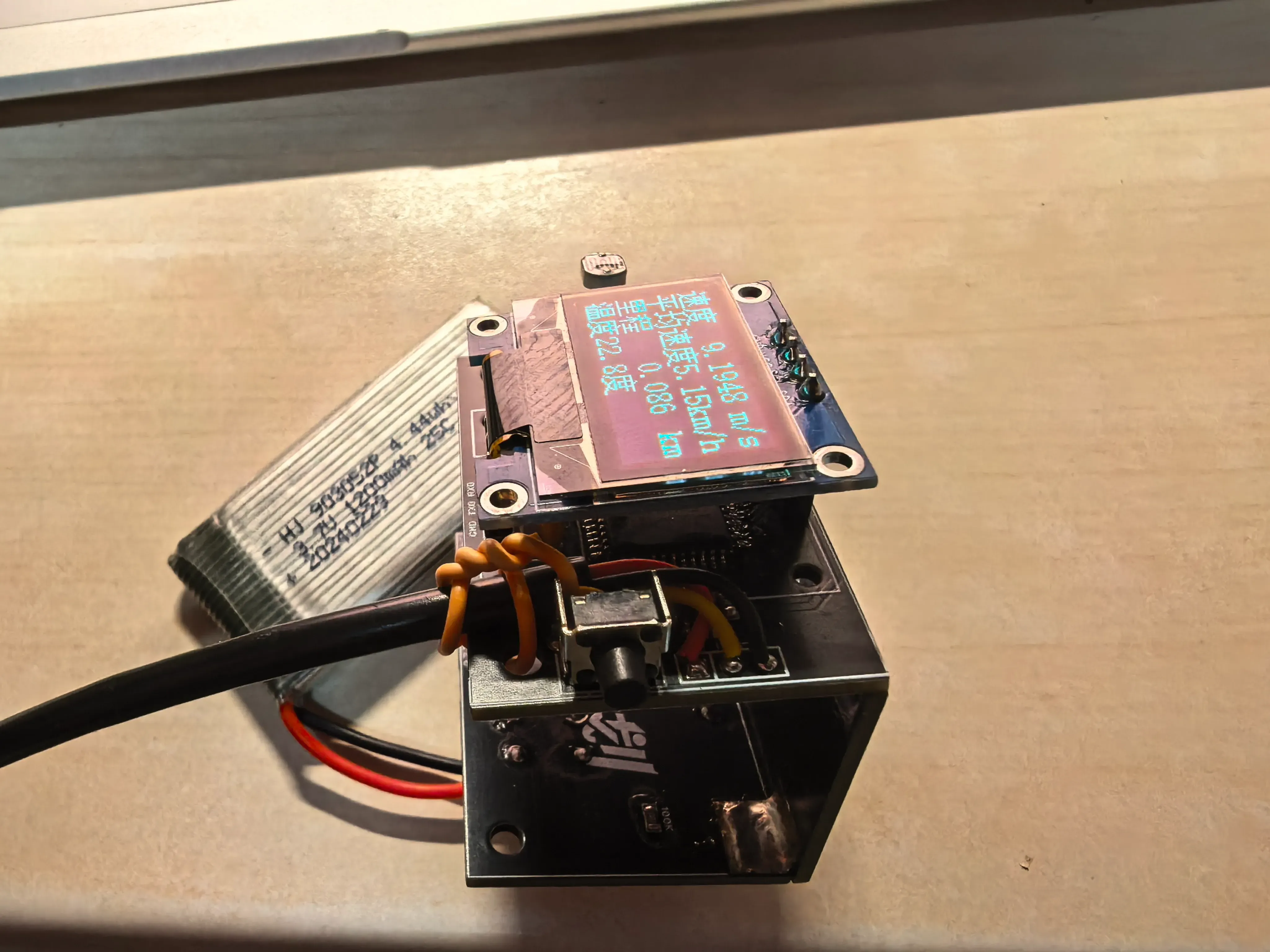
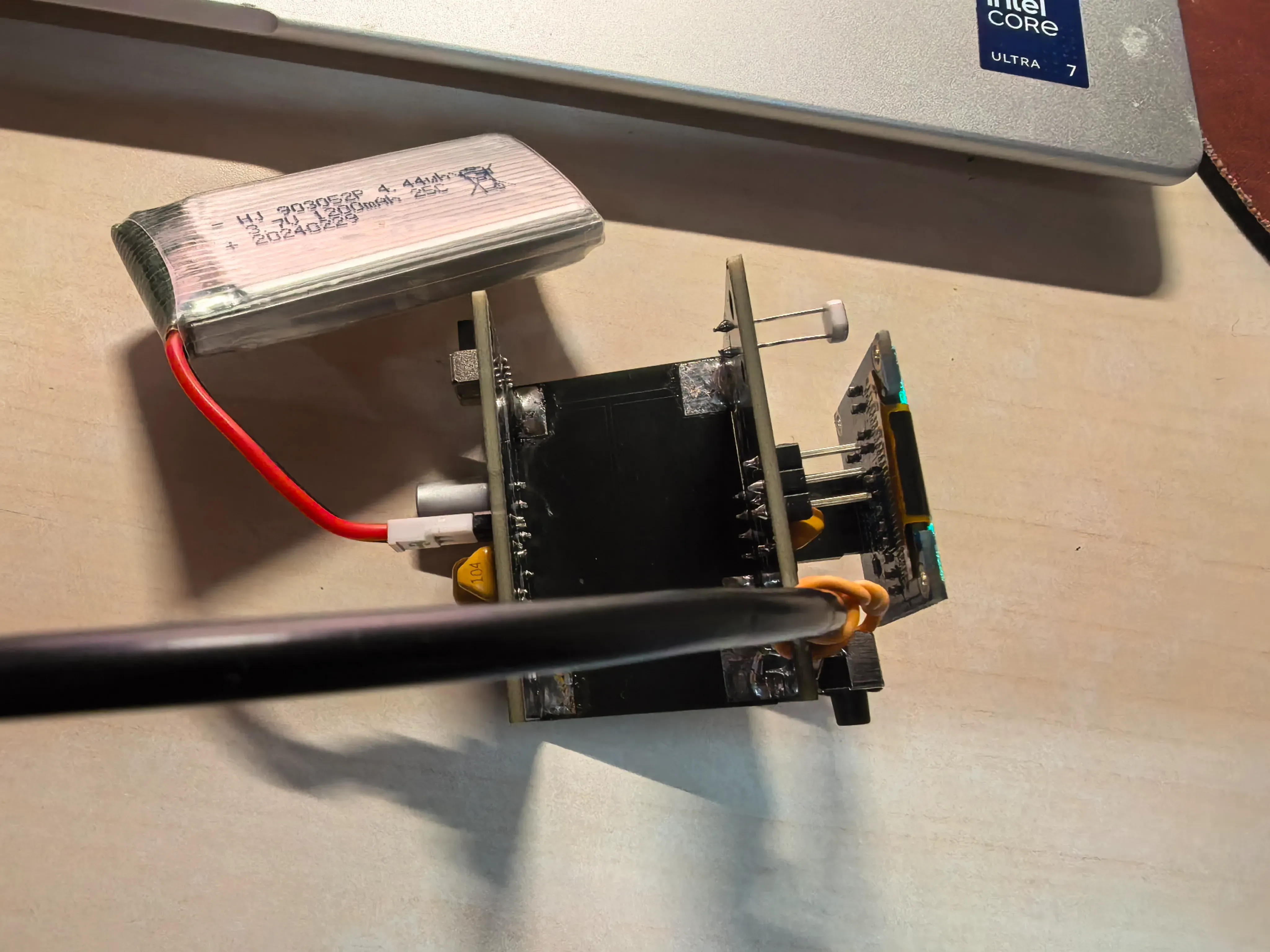
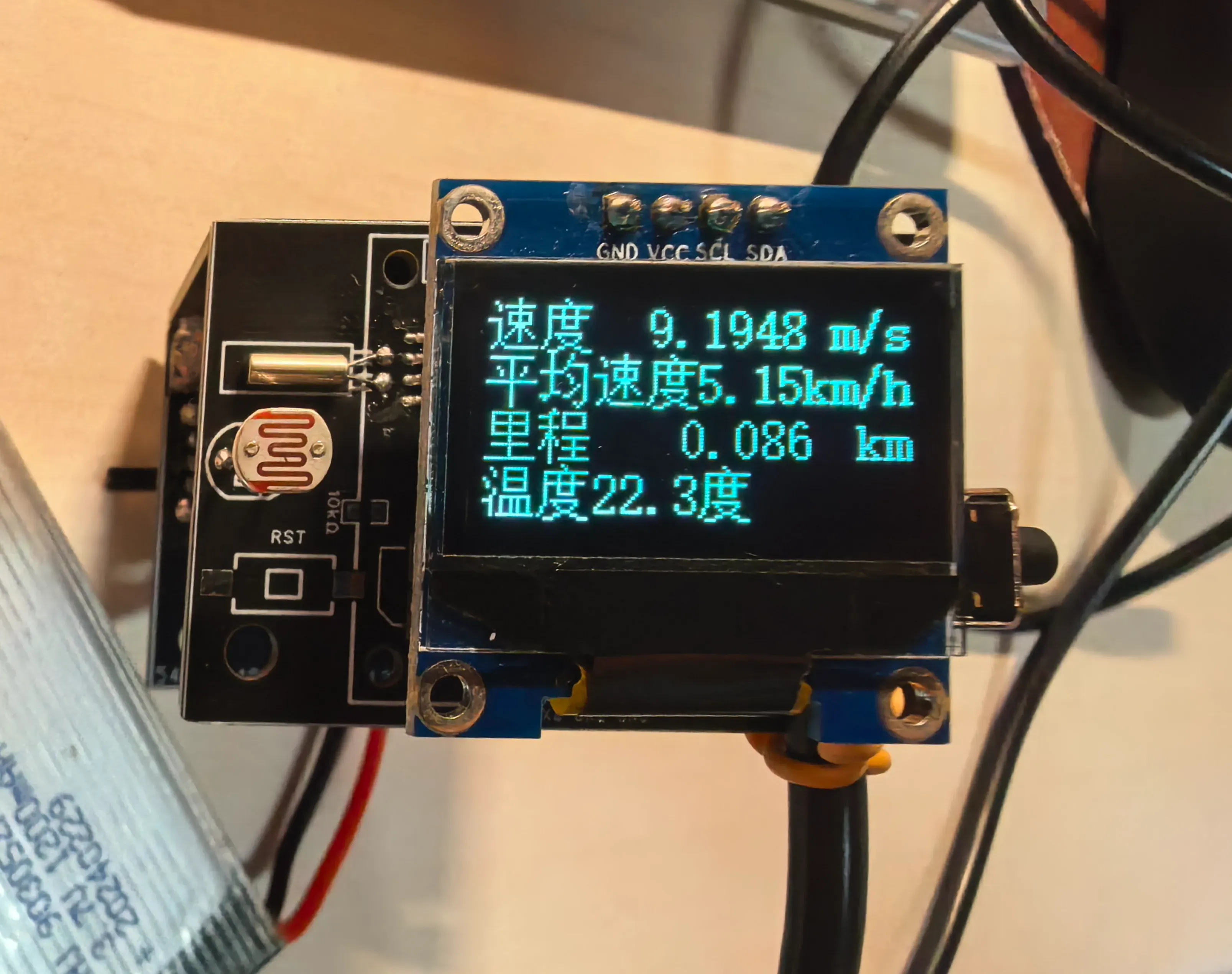
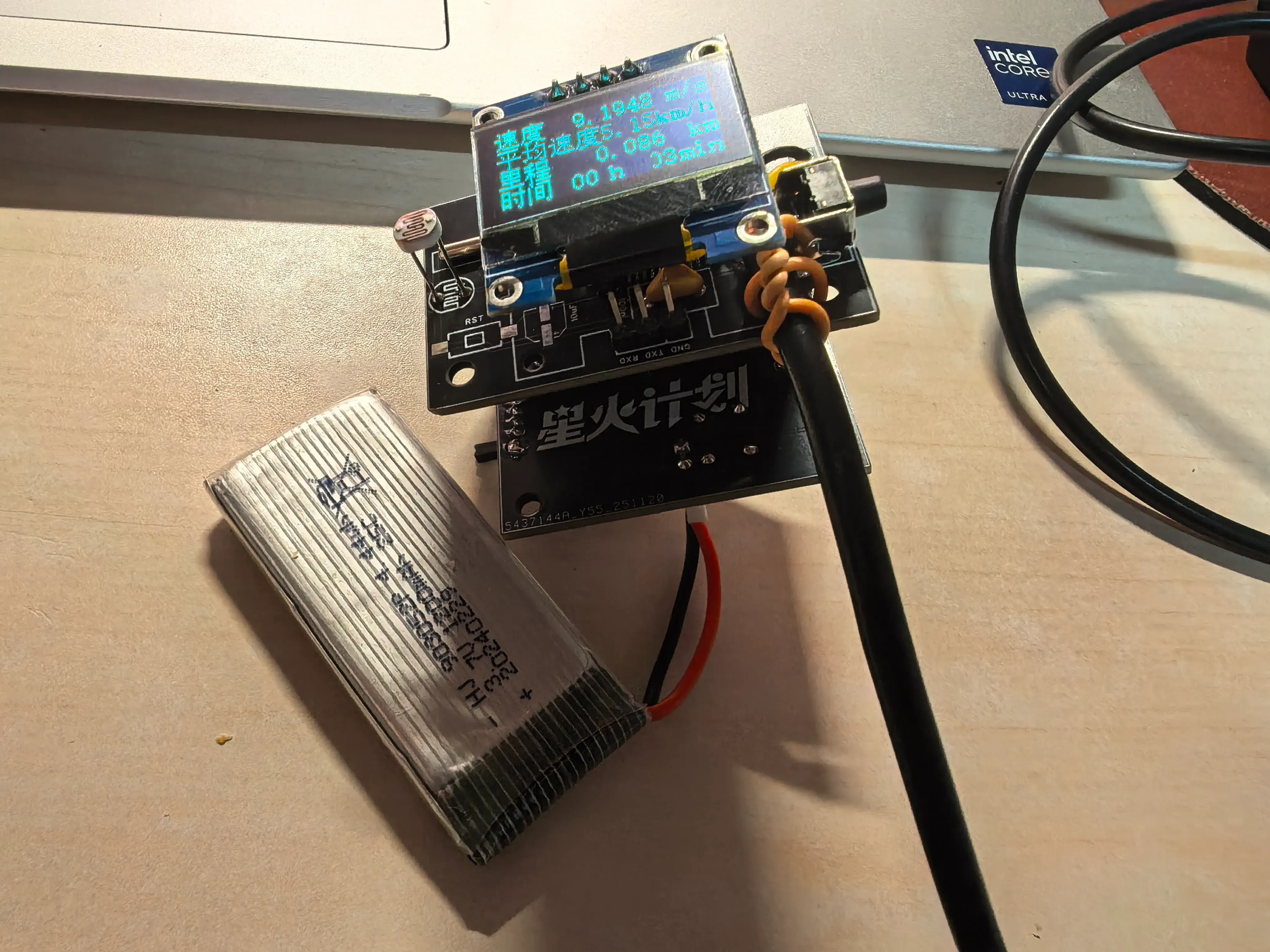
装机图




设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









