

专业版
2025ROBOCON飞身上篮硬件开源
832
0
0
1
简介
2025RC飞身上篮,根据赛题我们采用分模块设计,机器上所使用到的所有硬件内容均在此,均为自制板,仅供参考。
简介:2025RC飞身上篮,根据赛题我们采用分模块设计,机器上所使用到的所有硬件内容均在此,均为自制板,仅供参考。复刻成本:¥2000
开源协议
:GPL 3.0
(未经作者授权,禁止转载)创建时间:2025-08-15 10:35:58更新时间:2025-08-25 09:05:54
描述
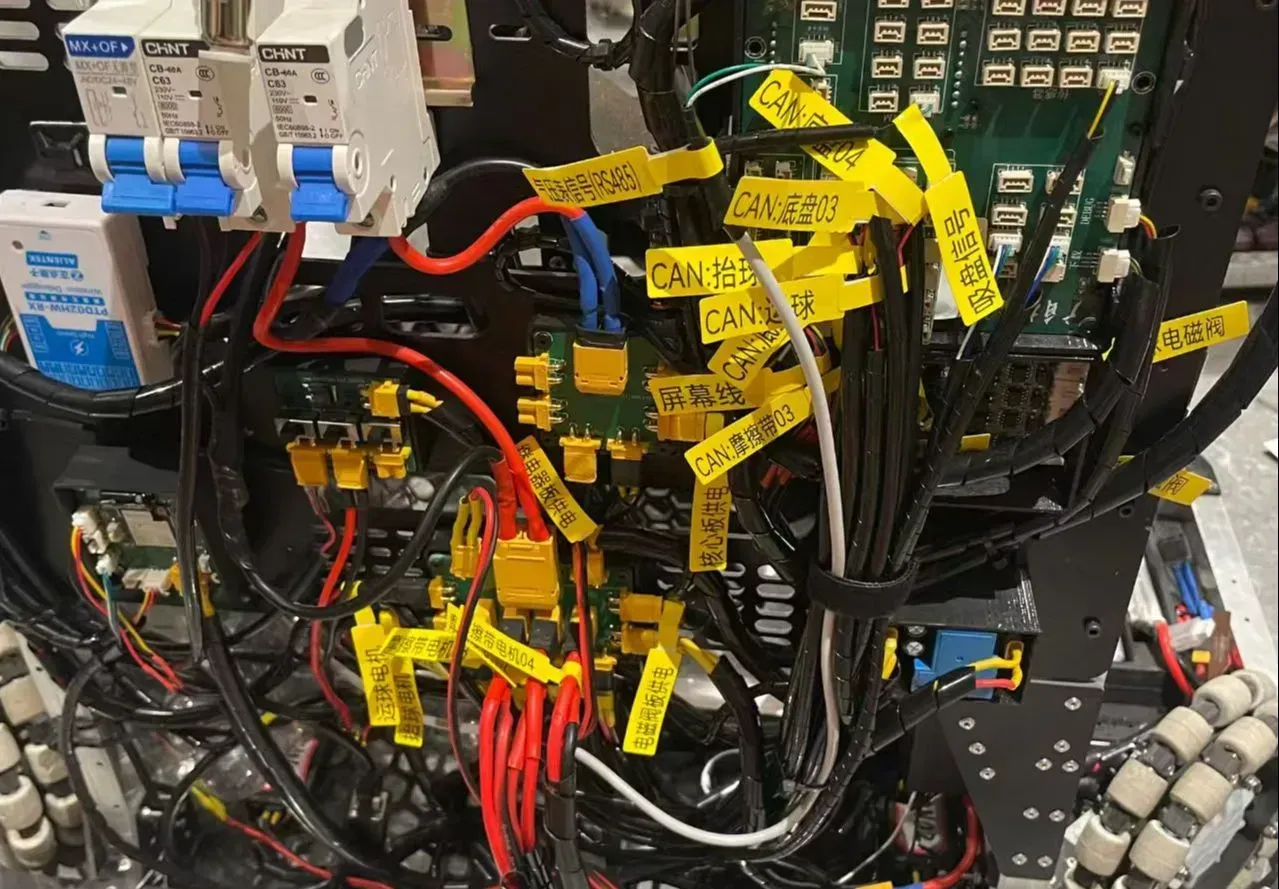
2025 ROBOCON“飞身上篮”项目已完赛,本模块是广东白云学院机器人队用于参加ROBOCON2025的现开源硬件资料
STM32H7主控板与驱动板可自由使用,请注明出处。
**在战队参加2025年ROBOCON的过程中没有发生过故障,可以安心使用。 **

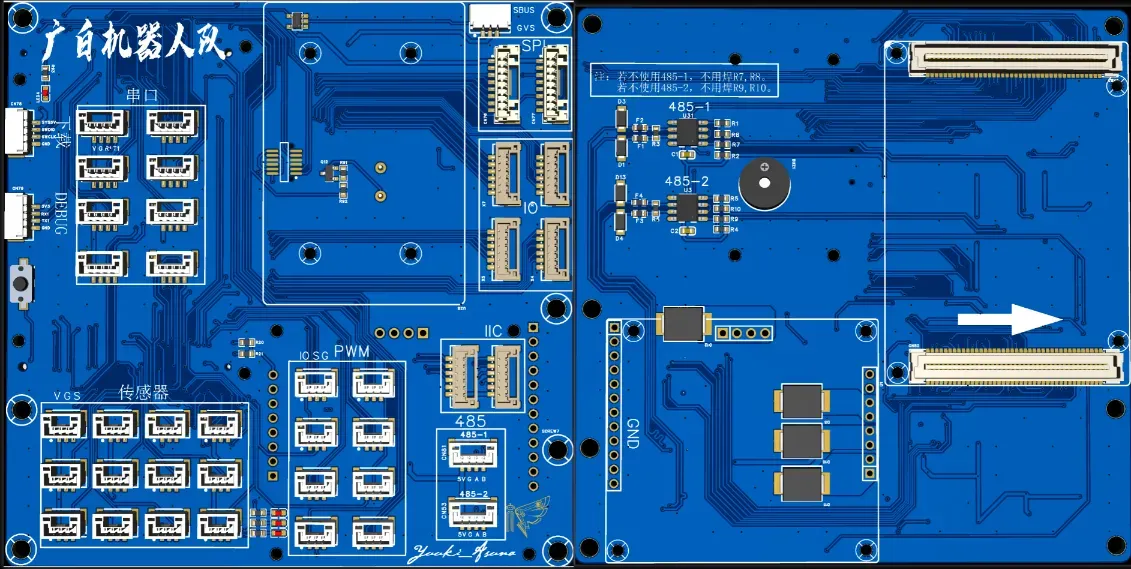
- STM32H7主控板采用的是模块化的,将核心板、电源、CAN分别作为模组,集成在底板上,同时底板上可以引出许多串口、传感器、RS485、I2C、SPI等等接口。(其中RS485是另外集成在底板上的)
-
底板
-
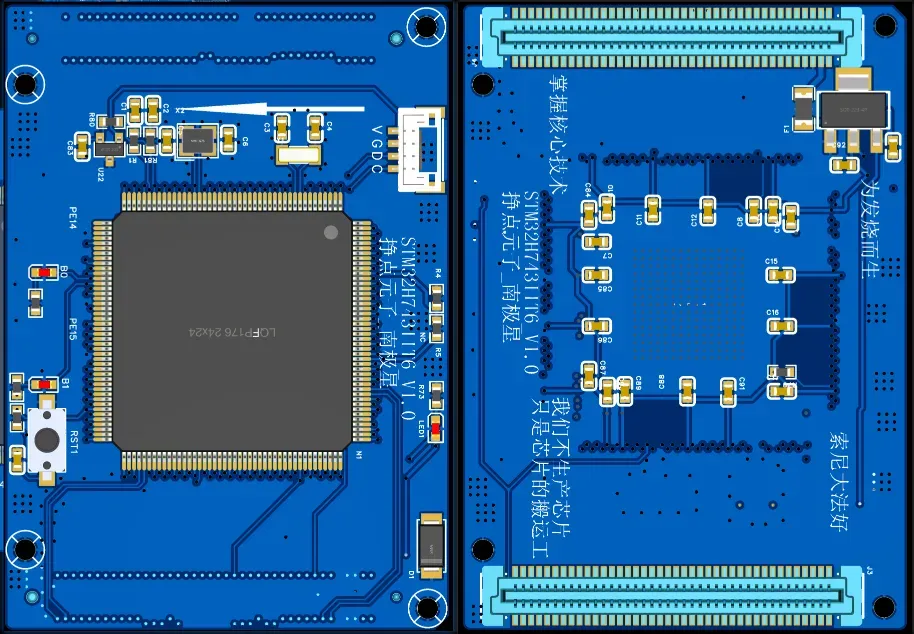
核心板
-
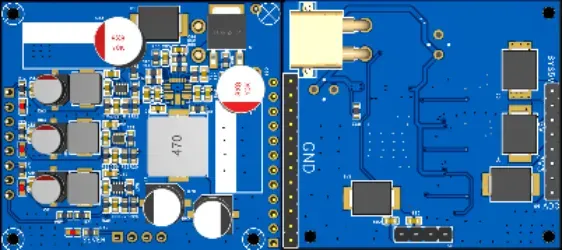
电源模组
-
CAN模组
主控说明
我们将主控做成模块化的原因有两个:
- 在典型的硬件开发流程中,底板承担着连接外围器件、接口扩展、机械定位等任务,受整机结构、外设变更、客户新增需求或电磁兼容测试反馈的影响,往往需要经历多次迭代:每一轮都要重新走线、调孔、改叠层、验证信号完整性,可谓“牵一发而动全身”。相比之下,核心板和电源板(AC-DC 或 DC-DC 功率转换、电池管理单元)在功能定义、器件选型和关键信号拓扑上高度固化——一旦在 设计验证测试阶段完成 1~2 次打样并通过时间测试,其原理图、PCB 封装及 BOM 基本不再改动。
当系统被拆分成“底板 + 核心板 + 电源板”的模块化架构后,测试与排障流程也随之被细化到“单板级”。这种“问题单板化、整改局部化、风险隔离化”的测试策略,不仅把平均故障定位时间从过去的数天压缩到小时级,还彻底杜绝了“改底板却重焊全部 BGA”带来的二次损伤与人力浪费,真正实现了高效、低风险的持续迭代。
- 其他板子
另外还有驱动板,电源板、传感器等其他板子都在开源的工程里面,大家感兴趣可以进行了解,在不同模块中均有进行描述。 - 这是我们团队的所有硬件开源资料,如果有发现错误的地方也希望大家积极提出并指正!
4.联系作者
如果对本项目有任何疑问或遇到任何问题,欢迎加入广白机器人队QQ交流群进行交流
qq群号:977021844

特别鸣谢
MPS对电源模块的大力支持
**> MPS中国大学计划开启于2018年,紧跟国家“新工科建设”
的战略方向,从前沿应用技术出发,基于经典教材,致力于高
等教育理论与实际的有机结合,投身中国“卓越工程师培养”
大计。目前MPS已在全国多所高校开展了各项教学科研及竞赛支持活动,深受教师与同学的好评。
若需要MP5048测试样品可以填一下【MPS大学计划】免费样品申请单:
MPS中国大学计划

设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









