

类舵机方案仿生蝴蝶主控开源
简介
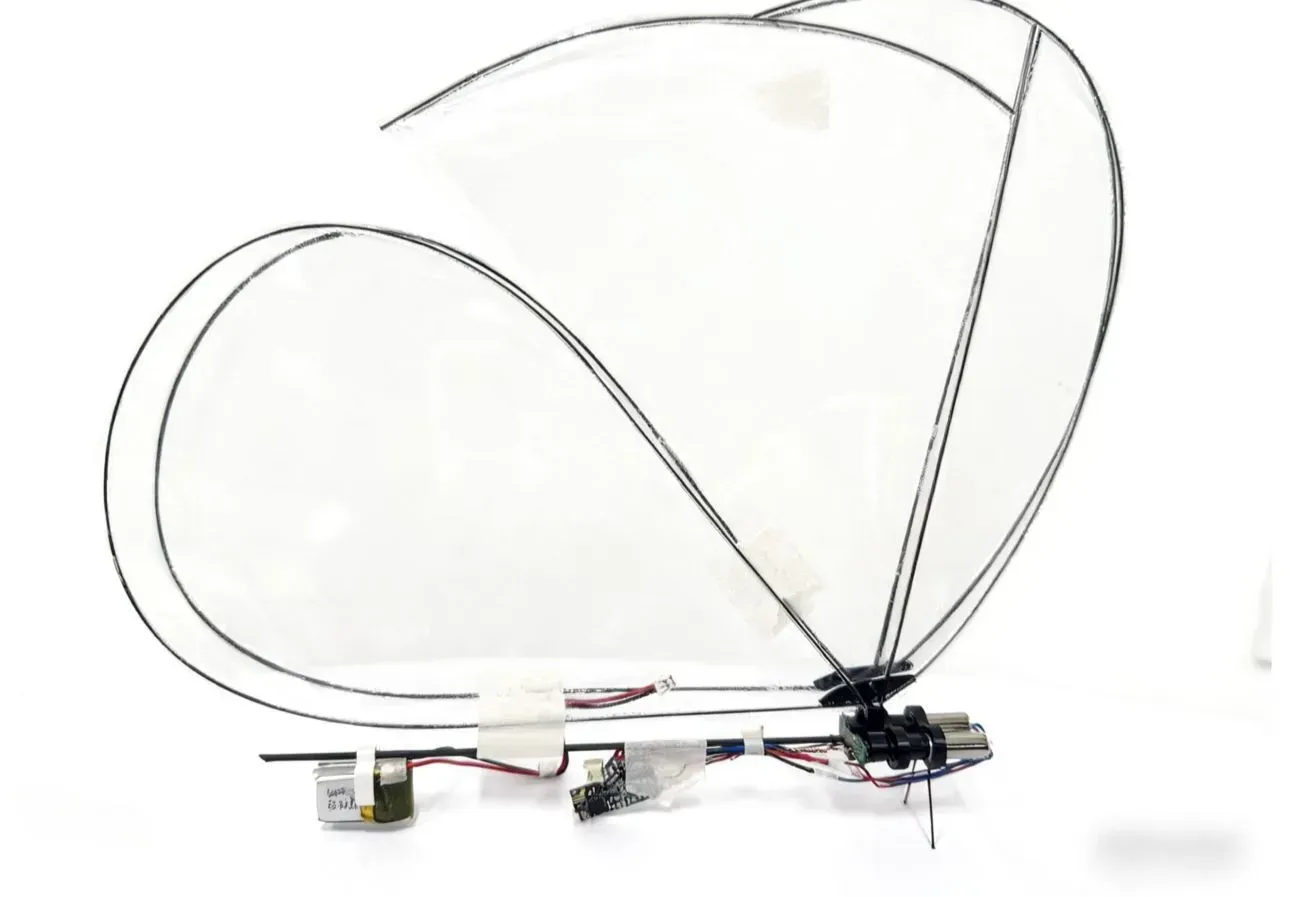
这是一款面向科研教学与仿生飞行实验的超轻量化飞控主板,专为四翼独立扑翼机系统设计。 该项目旨在通过开源设计与共享理念,推动仿生扑翼飞行控制、微型无人机教育实验与开源硬件开发
简介:这是一款面向科研教学与仿生飞行实验的超轻量化飞控主板,专为四翼独立扑翼机系统设计。 该项目旨在通过开源设计与共享理念,推动仿生扑翼飞行控制、微型无人机教育实验与开源硬件开发开源协议
:CC BY-NC-SA 3.0
描述
我们希望通过该项目:
-
推动仿生扑翼飞行控制相关技术在教育、科研和创客社区中的传播;
-
建立一个开放共享的学习与实验平台,降低入门门槛;
-
鼓励二次创新,但同时保护原始设计者的劳动成果与署名权。
因此,本项目采用 CC BY-NC-SA 3.0(署名-非商业性使用-相同方式共享) 协议发布。
允许学习、修改与再创作,但禁止其他组织或个人任何形式的商业售卖与转让。
二、项目概述
创源启明蝴蝶四翼主控板 V3.0 是一款专为四翼独立扑翼机开发的超轻型主控板,主要服务于:
-
仿生飞行机构研究;
-
工程实训及创新实验教学;
-
高校及创客竞赛(如电赛、机械创新赛等);
-
微型无人飞行系统的二次开发与功能验证。
该主控以体积小、结构紧凑、接口标准化为主要特征,充分考虑到实验应用中的接线便捷性、模块兼容性及稳定性,能在极低功耗下实现多电机精确控制。
三、核心技术特性
| 类别 | 参数 / 特性说明 |
|---|---|
| 主控结构 | 支持双电机 / 四电机独立驱动方案 |
| 电源输入 | 5V~10V(推荐7.4V 2S锂电池) |
| 整板重量 | 约 0.29g |
| 尺寸 | 14.8mm × 11mm × 0.4mm |
| 电机输出功率 | ≤1.5W |
| 接口类型 | MX1.25系列插座,支持ELRS接收机、磁编码器、下载接口等 |
| 工作温度范围 | -10℃ ~ +60℃ |
| PCB工艺 | 沉金工艺 / 0.4mm轻量板材 |
| 兼容性 | 可用于自研双翼、四翼、仿蝴蝶式扑翼机结构 |
四、开源内容
本项目开源内容包括但不限于以下部分:
-
硬件设计文件
-
原理图(PDF / EDA工程文件)
-
PCB布线图与3D视图
-
元器件清单(BOM表)
-
-
技术文档与使用手册
-
电机与编码器接线指导
-
烧录与调试方法
-
-
示例应用与实验方案
-
双电机与四电机接线示意
-
仿生扑翼机构组装示例
-
程序下载及控制逻辑说明
-
-
社区资源
-
技术交流群与视频教程
-
项目开源链接(嘉立创EDA / GitHub / Gitee)
-
五、开源协议与版权说明
本项目遵循 CC BY-NC-SA 3.0(署名-非商业性使用-相同方式共享) 开源协议。
✅ 您可以
-
学习、复制、研究和传播本项目资料;
-
修改、扩展或衍生新的设计;
-
用于教学、科研、非盈利性创客活动。
⚠️ 您必须
-
在所有再分发或修改版本中注明原始作者及来源:
来源:创源启明蝴蝶四翼主控V3.0
作者:合肥创源启明科技有限公司
协议:CC BY-NC-SA 3.0 -
将修改后的作品继续以相同协议(BY-NC-SA)开源;
-
保留所有原始版权与署名信息。
🚫 您不得
-
将本项目或其衍生版本用于任何商业用途(包括但不限于:销售、代工、众筹、广告、闲鱼/淘宝等平台交易);
-
删除、隐藏或修改版权声明与许可信息;
-
使用项目名义进行未经授权的推广或产品销售。
💡 特别声明
如您确有商业应用需求,可通过电子邮件申请单独授权,我们将根据具体情况提供书面许可。
六、项目宗旨与教育价值
本项目不仅是一个硬件平台,更是一个面向教育与创新的开源方案。
通过开放电路设计与结构信息,学生和创客可以:
-
学习嵌入式系统、PWM电机驱动、姿态控制等核心技术;
-
实践硬件焊接、调试与飞行参数优化;
-
在此基础上开发新的生物仿生机器人或实验平台;
-
参与开源协作,共同改进与推广国产轻量飞控设计。
我们的目标是让更多的年轻工程师、设计者和学生能够在理解原理的基础上创造属于自己的飞行器。
七、获取方式与交流渠道
| 内容 | 链接 / 方式 |
|---|---|
| 代码开源 | 群内获取QQ群号:1032378157 |
| 展示视频 | Bilibili频道:【【零基础】类舵机仿生蝴蝶开源教程[持续更新中]】 https://www.bilibili.com/video/BV1gnWdzSEu1/?p=2&share_source=copy_web&vd_source=cfefab070031f52c23fe4e1ca22137d8 |
| 购买正版主控 | https://item.taobao.com/item.htm?id=989814620789&mi_id=0000i-vYtfqxmXK21DxjCTfjkiTesMIQeyGLFynTcjEsYmI&sku_properties=5919063%3A6536025&spm=a21xtw.29178619.0.0 |
| 技术交流群 | QQ群号:1032378157 |
| 联系邮箱 | 2641163240@qq.com |
| 教学视频 | Bilibili频道:【【零基础】类舵机仿生蝴蝶开源教程[持续更新中]】 https://www.bilibili.com/video/BV1gnWdzSEu1/?p=2&share_source=copy_web&vd_source=cfefab070031f52c23fe4e1ca22137d8 |
我们鼓励所有使用者加入社区,分享作品、问题与改进建议,共同完善“创源启明”系列开源项目。
八、免责声明
本项目资料按“原样”提供,不提供任何明示或默示的保证,包括但不限于适销性、特定用途适用性或安全性保证。
使用者需对因使用本项目所导致的损失或风险自行负责。
使用或下载本项目资料,即表示您已阅读并同意本说明文档与许可条款。
九、版权信息
© 2025 合肥创源启明科技有限公司
项目名称:创源启明蝴蝶四翼主控V1.0
协议类型:CC BY-NC-SA 3.0(署名 - 非商业性使用 - 相同方式共享)
版本日期:2025年10月
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









