


球形六足双形态机器人
简介
此工程为本人毕设机器人的PCB部分,使用两个串口分别控制机器人下部18个舵机和上部12个舵机
简介:此工程为本人毕设机器人的PCB部分,使用两个串口分别控制机器人下部18个舵机和上部12个舵机开源协议
:GPL 3.0
描述
视频链接:
项目简介
一种可在球形和六足形态切换的可变形机器人设计与开发
本项目旨在尝试复刻项目morphex,同时作为本人本科毕业设计题目,参考外观及运动原理,重新设计机械结构、电路及程序。
原作者ZentaRobotics视频主页如下:https://www.youtube.com/@ZentaRobotics
项目源码及3D模型请转至GitHub:
https://github.com/ZGPS-666/ZGPS_01
3D模型文件请使用solidworks 2024及以上版本打开,钣金件所需数目已在文件名标注,3D打印可转至makerworld,已切片,方便打印:https://makerworld.com.cn/zh/models/1331257-qiu-xing-liu-zu-shuang-xing-tai-ji-qi-ren#profileId-1434366
项目功能
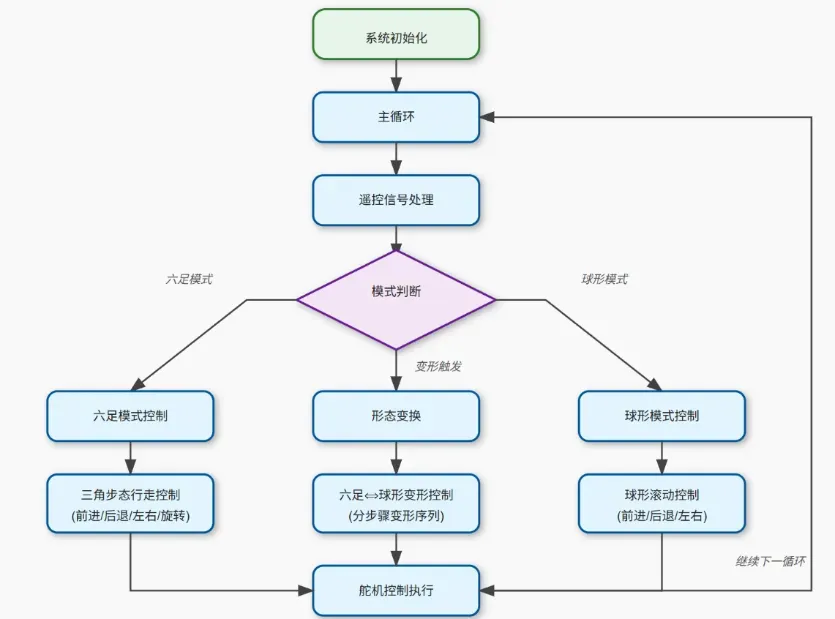
作为本人首个独立完成的完整机器人系统项目,在有限的开发周期内,项目重点聚焦于核心功能的复现与验证。当前版本已成功实现机器人的基本运动能力,包括六足步态行走、球形滚动和形态切换功能。
本设计是基于STM32F407ZGT6微控制器的多形态变形机器人系统:
- 六足行走模式:支持直线前进、侧向移动、原地旋转等多种运动方式,采用三角步态实现稳定行走;
- 球形滚动模式:通过12个切片的协调控制实现前进、后退、左转、右转等全方向滚动运动;
- 自动变形功能:实现两种形态间的平稳切换;
- 多种控制方式:支持遥控器控制和语音识别控制,提供灵活的人机交互方式;
项目参数
- 六足模式行走速度:≥0.2m/s,具备全向移动和精确转向能力;
- 球形模式滚动速度:≥0.5m/s,运动效率显著提升;
- 形态切换时间:<30秒,具有较高的成功率和可靠性;
- 球形结构直径:400mm,由6个环向分布的可控切片组成;
- 驱动系统:30个20kg·cm串口总线舵机 + 1个70kg·cm数字舵机;
- 工作电压:7.4V,续航能力:9000mAh大容量航模电池;
- 通信方式:2.4GHz无线遥控 + 离线语音识别;
原理解析(硬件说明)
本项目由以下核心部分组成:主控制系统、驱动系统、变形机构、通信系统和供电系统。
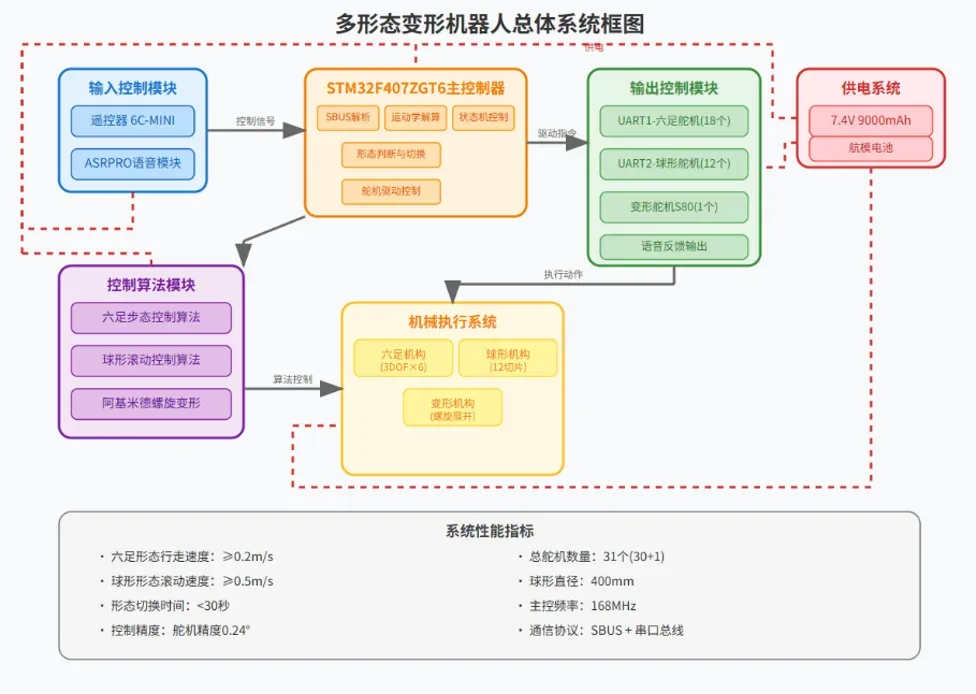
主控制系统:采用STM32F407ZGT6微控制器,168MHz主频,1M Flash + 192K SRAM,提供6个UART接口满足多舵机通信需求。集成了运动学解算、步态控制、形态切换等核心算法。
驱动系统电路:使用AIP74HC126TA.TB四路三态缓冲器实现串口信号的电平转换和驱动增强。30个ZX20D总线舵机负责腿部运动和切片控制,1个S80舵机专门驱动变形机构,满足大扭矩变形需求。
变形机构设计:核心采用阿基米德螺旋原理设计的底盘展开机构,通过螺旋形切片在齿轮系统驱动下的轴向旋转,实现六条腿的同步展开和收缩,确保形态切换的稳定性和可靠性。
通信系统电路:集成Microzone 6C-MINI遥控器系统,通过MC7RB-V2接收机实现2.4GHz无线控制。SBUS信号经过硬件电平反转电路处理后接入主控。同时集成ASRPRO语音模块,支持离线语音识别控制。
供电系统:采用7.4V/9000mAh/10C大功率航模电池,满足六足行走模式下的高功率需求,通过PCB上的电源管理电路为各模块提供稳定供电。
软件代码
完整代码请参考:(https://github.com/ZGPS-666/ZGPS_01)
注意事项
- 所有安装步骤前请先完成总线舵机编号并调至中位,工作模式选择模式一,开机模式选择模式三
- 所有安装步骤前请把中央舵机先设置至30°位置
- 遥控器使用前需要与接收机进行配对,注意SBUS信号的电平转换;
- 电池电压较低时应及时充电,避免影响大扭矩舵机性能;
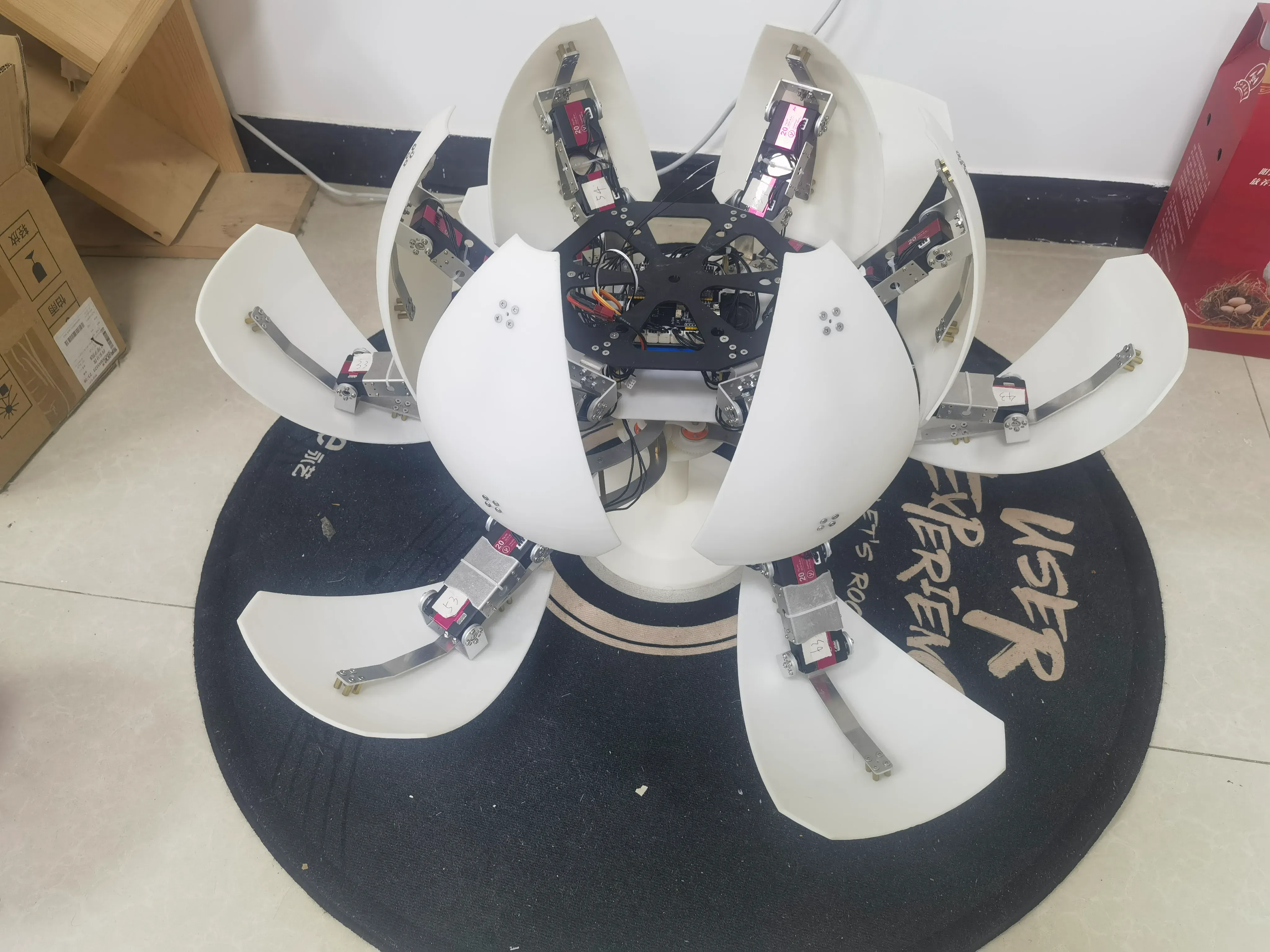
实物图
图1:六足形态 - 机器人完全展开的六足行走状态

图2:球形态 - 机器人收缩后的球形滚动状态

图3:展示模式 - 从六足向球形转换的中间状态
更新说明
PCB:
v2.0 重新布线,调整舵机接口位置,增加OLED显示
v2.1 增加电压检测电路
机械:部分零件镂空处理,减轻重量,增加顶部面板文件,可采用透明亚克力切割
声明
由于本人水平有限,初次独立完成完整项目,时间仓促,仅完成机器人的基本功能,代码已有堆史山的趋势,所以本项目只能保证机器人能动。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









