


odrive75100(柠檬FOC)
简介
鸽鸽鸽!历时大半年的打磨,odrive75100终于与大家见面啦!
简介:鸽鸽鸽!历时大半年的打磨,odrive75100终于与大家见面啦!开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
一、重点
禁止任何商用行为,包括但不限于咸鱼/淘宝上售卖我的板子or资料!!!!
二、简介
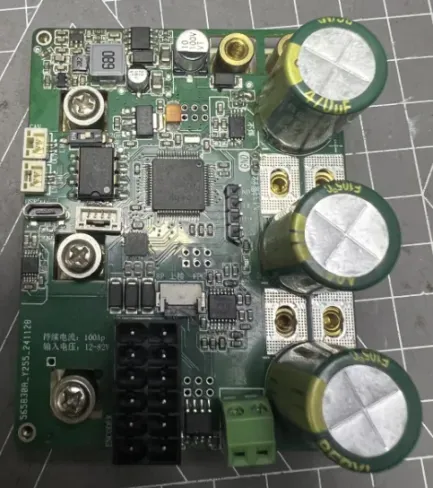
Odrive75100单驱分立板(简称OD75100) 是适用于三相无刷直流电机和永磁同步电机的高集成度FOC驱动器,基于功能强大、性能稳定的开源项目Odrive 3.6(56V版本),使用了M1这路电机轴,额定电流高达100A,额定电压为12-75V,功率之大无出其右,并且进一步优化电路、缩小体积(尺寸仅为银行卡大小)。预驱使用国产分立方案,替换掉了昂贵且容易损坏的DRV8301,提高驱动器整体的可扩展性。原理图,PCB以及固件代码全部开源(基于更稳定的V0.5.2版本)!!!感谢柠檬UP的仁慈吧!
对比官方的原版ODRIVE,OD75100做了如下改进:
- 编码器方面添加了霍尔滤波电路,现在的ABZ接口稳定支持霍尔模式。修复了原版ODRIVE的SPI不稳定的问题,支持更稳定的SPI模式,预留SPI编码器接口,支持的编码器有AS5047P。新增多摩川协议编码器接口(测试中)。
- 基于实际项目制定的CAN通信协议,实时传输电机的电流/位置/速度等信息,且协议十分稳定,提供基于STM32F4的CAN通讯Demo(带注释),提供完善。
- 优化接口,全部使用25接口,连接更稳定,使用主流的TYPE-C接口,更方便连接odrivetool和odriveGUI。进一步优化电路,在保持额定电流100AP,额定电压12-75V的大功率的同时,尺寸仅为一张银行卡大小(长宽仅为7.87CM x 6.1CM)。
- 采用FPC接口连接LCD屏幕,实时显示电机状态(测试中)。
- 相比于市面上使用不稳定的V0.5.1代码的板子,OD75100使用深度修改过的5.6代码(最新),全面重构了框架,运行更稳定,稳定使用SPI绝对值编码器,无需每次上电校准电机编码器,让Odrive从不稳定的玩具变为生产力工具!
- 功率板使用铝基板,并且使用多个镀锡铜条,过流持续稳定、散热更高效,专为大电流设计,实测在60V输入电压下,测试极飞A40电机,无额外散热的情况下,持续电流达50A,支持宽电压输入:12V至75V,报警电压为84V。
- 单驱板的MOS功率管全部采用NCEP023N10LL(100V,300A,)超低内阻的TOLL封装功率管,增强载流能力+使用三组470uf的铝电解电容,抗浪涌能力更强,使用瞬态抑制二极管(SMCJ100CA)吸收尖峰电压,电机运行更加平滑稳定!
- 预驱使用全国产方案,官方采用的是DRV8301集成芯片,容易损坏且可带负载功率低。为了解决这个问题,深入原理,使用3路半桥和国产MOSFET驱动芯片(FD6288),以及独立的电流采样芯片,性能提升一倍(最大负载和瞬时冲击响应良好),一句话,比原版本耐cao。
- 开源社区,欢迎加入柠檬FOC 千人交流群,助力每一位电机er!(群号:237559791)
- 使用两路LDO分别为数字电路和模拟电路供电,运放芯片工作更稳定。使用高功率的分立式DC-DC电路(12-100V输入)和Boost电路为整个系统供电,效率高,稳定性强,无惧浪涌电压冲击。
- 关键参数
|
工作电流 |
|
|
制动方式 |
功率耗散电阻 |
|
直流无刷电机 |
|
|
尺寸 |
7.87CM*6.1CM |
|
使用电机轴 |
M1 |
|
外接编码器类型 |
SPI编码器/霍尔编码器/增量式编码器/多摩川编码器 |
|
最大输入电压 |
84V(超过该值可能使元器件损坏!) |
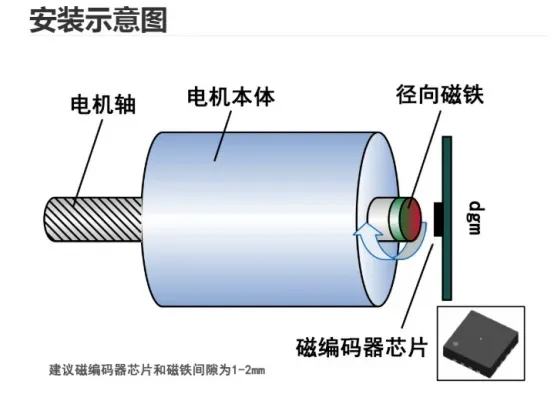
三、电机安装说明
如果使用资料中的万能编码器板(板载AS5047P编码器,可使用SPI/ABZ增量模式),需要按照如下操作固定编码器板子和电机。
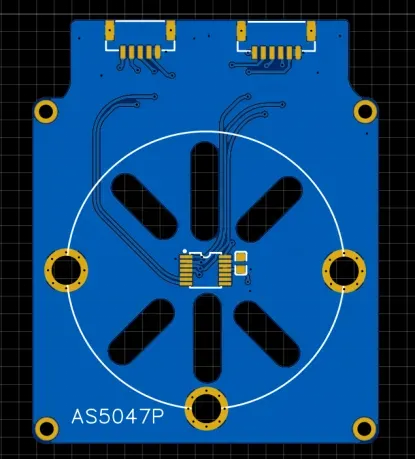
如下图所示:
- 使用强力胶或转接座将径向磁铁(5mm-5mm)固定在电机旋转轴末端上。为了更好的精度请尽量使径向磁铁轴心和电机轴轴心同心。
- 将万能编码器板子固定到电机定子或者壳体上,使板子背面的磁编码器芯片位于径向磁铁正上方,且磁编码器芯片表面距离径向磁铁表面 3mm以内来保证磁编码器所需要的磁场强度。
六、硬件准备
- OD75100
- 12V-56V 开关电源/锂电池
- Type-C 数据线(注意区分数据线和充电线)
- 96寸LCD显示屏(可选)
- 功率耗散电阻(开关电源需要)
Ⅰ.连接电源
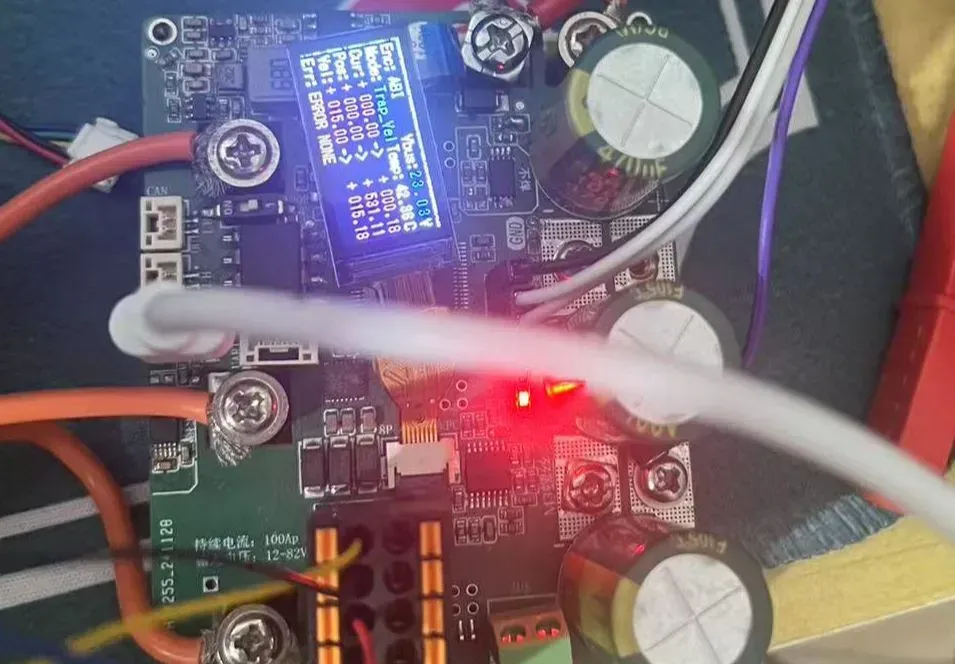
接入DC_BUS电源(先接入正负极,再打开电源开关),LED灯和屏幕亮起。
Ⅱ. 检查稳压电路的输出5V,以及数字供电3.3V、驱动芯片供电12V等。
Ⅲ.连接功率耗散电阻(使用开关电源必备)
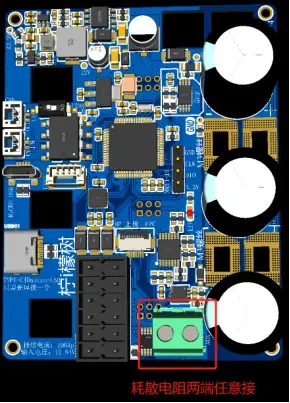
注:功率耗散电阻的负极和接入电源的负极是同一个,通过以下指令使能功率电阻:
odrv0.config.brake_resistance = 2.05 #(根据实际的耗散电阻阻值+0.05)
odrv0.config.enable_brake_resistor = True
odrv0.config.dc_max_negative_current = -5.0 #如果使用电池则该值为0
odrv0.config.enable_dc_bus_overvoltage_ramp = True
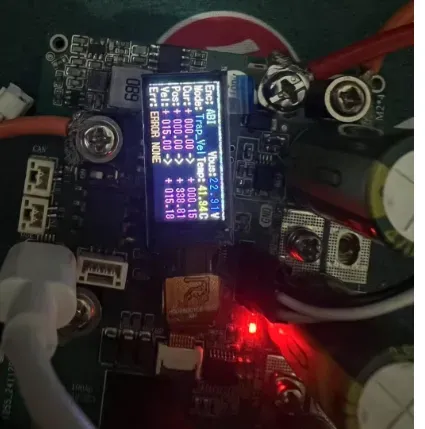
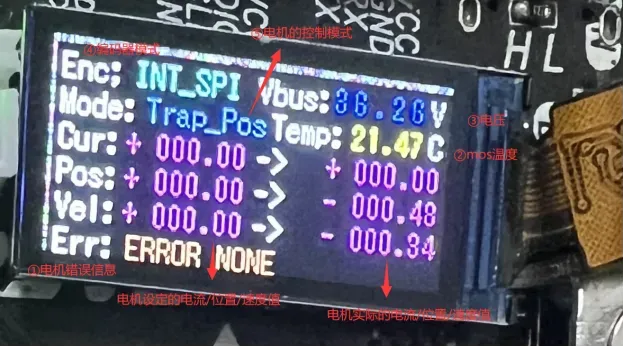
Ⅳ.LCD屏幕
屏幕详细信息如下:
七、QQ群 和B站
后续的代码和硬件的迭代都会在群里发布,有什么不懂的也可以在群里交流,欢迎加群!
这个是1群,快满员了

这个是2群,刚创建的,建议加此群

如果您觉得我的作品还不错,可以在B站关注一下我哦,后续会持续开源各种项目,第一时间推送给您!

十一、附件内容
附件内容如下:odrive固件,stm32f4通过can与odrive通信的例程,电机配置表和说明书
注意:
1.修改后的odrive源码和硬件的迭代会在群里发布,有需要的可以加一下上面的QQ群哟!
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









