

3D打印-兔子多色V2(ERCF V2/V3)主板
简介
使用STM32小蓝板做的3D打印多色ERCF V2主板
简介:使用STM32小蓝板做的3D打印多色ERCF V2主板开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
请注意用电安全
项目说明
年初在做兔子多色的项目的时候没有合适的主板,现有主板又太贵,手上刚好有闲置的STM32小蓝板,于是参考MMB主板以及其它Klipper画了这张板子,国产的32应该也是可以兼容
其优势是价格便宜,元件简单,最小的就是0603,焊接简单,电烙铁手焊的话一两个小时就能搞定
参数
核心板:STM32小蓝板(STM32F103C8T6)
电源输入:12-24V
PCB尺寸:10 x 5.4cm(PCB丝印预留,便于调试)
V1.3版本参数
- 2路步进电机接口(4988/2209),全UART支持
- 14路常规限位, 最高支持12色
- 12个预门传感器, 支持并联输入
- 1归位(支持ADC)
- 1缓冲(支持ADC)
- 1路TCRT5000红外传感器
- 1路RGB接口
- 1路可控风扇(AO3400 MOS)
- 3路舵机(可作为引出IO, 其中两路由SWD接口连接杜邦线连接才能使用)
- 两路独立5V供电(单路最大3A,高负载请加散热片)
- 舵机供电独立
- I2C预留
- CAN BUS
V1.1版本参数
- 2路步进电机接口(4988/2209),全UART支持
- 12路限位
- 1路TCRT5000红外传感器
- 1路RGB接口
- 1路可控风扇(AO3400 MOS)
- 3路舵机(可作为引出IO)
- 独立5V供电(最大3A,高负载请加散热片)
- I2C预留
- CAN BUS
目前进度
V1.3 PCB已打板验证,基础功能正常,建议直接使用V1.3.1
- V1.3.1仅移动元件位置, 解决电源模块干涉问题
V1.1 PCB已打板验证,基础功能正常,建议直接使用V1.1
CAN暂不进行验证,有需要的可以自行验证
硬件部分已经较为完善,后续发现问题再进行更新
烧录教程已补充
STM32小蓝板刷Klipper教程
已知问题
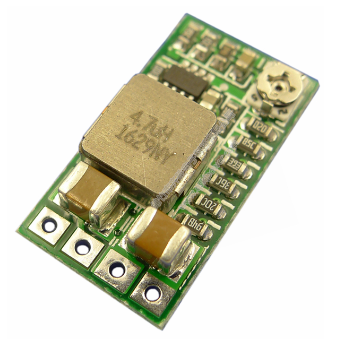
- 部分较大的MP1584模块可能会干涉, 焊接之前需要评估一下是否需要叠起来, 如下图
注意事项
MOS焊接请注意不要损坏MOS
4988驱动,MS0/MS1/MS2都插上,UART不插,即为16细分
2209驱动,UART插上,MS0/MS1/MS2都不插,即为UART模式
若使用USB与上位机通信,请勿插上5V供电跳线帽(否则可能会倒灌烧上位机USB口)
固件烧写可以搜索 STM32小蓝板 klipper 相关关键字,后续有空也将补充烧写教程
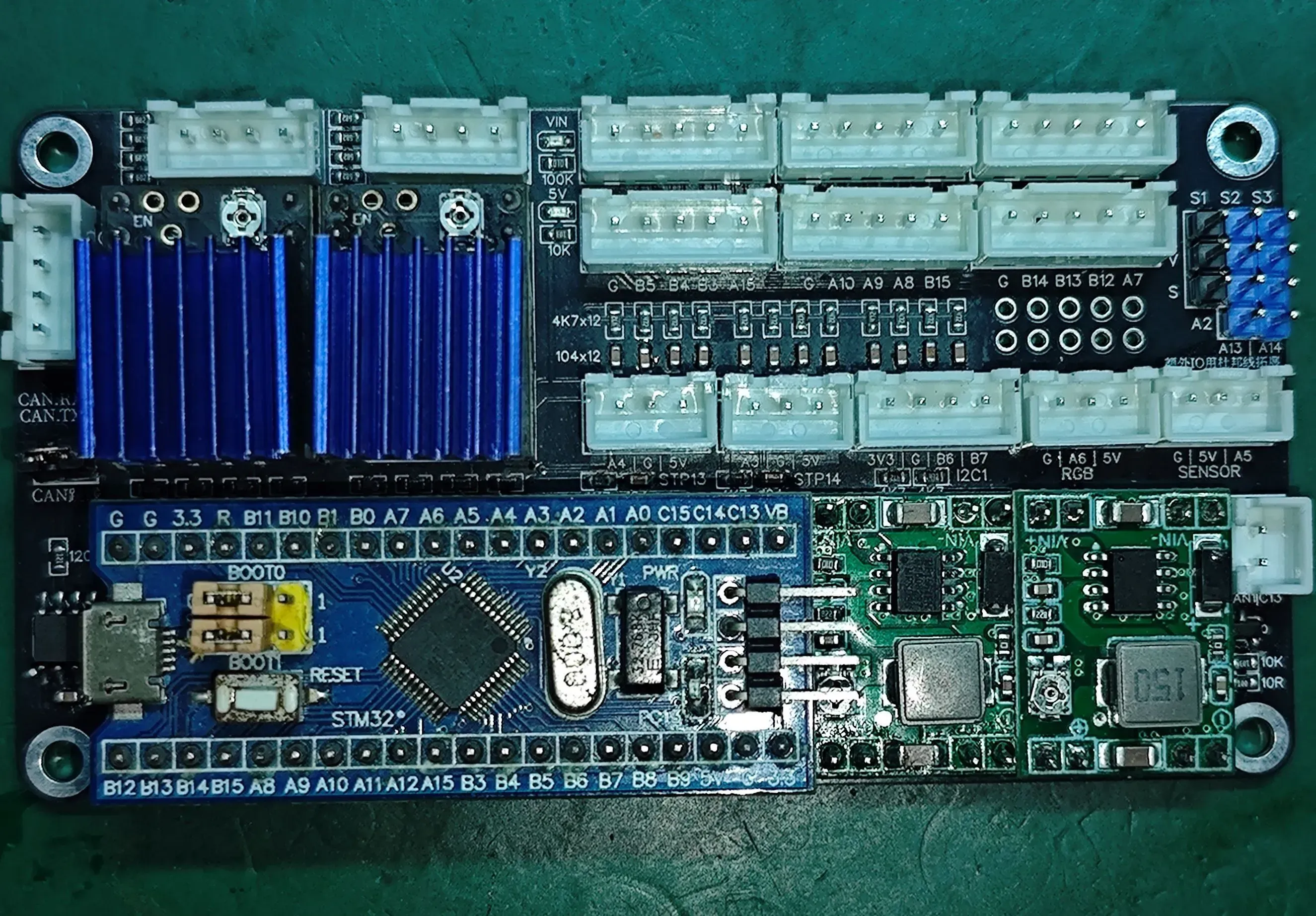
V1.3版本
STM32模块内的电容不要超过10mm,可换10V/1000uF,或直接使用直插电容卧式摆放
使用的降压模块 MP1584模块
请调整完电压后再焊接, 调整完成后, 最好用胶水固定, 避免误触

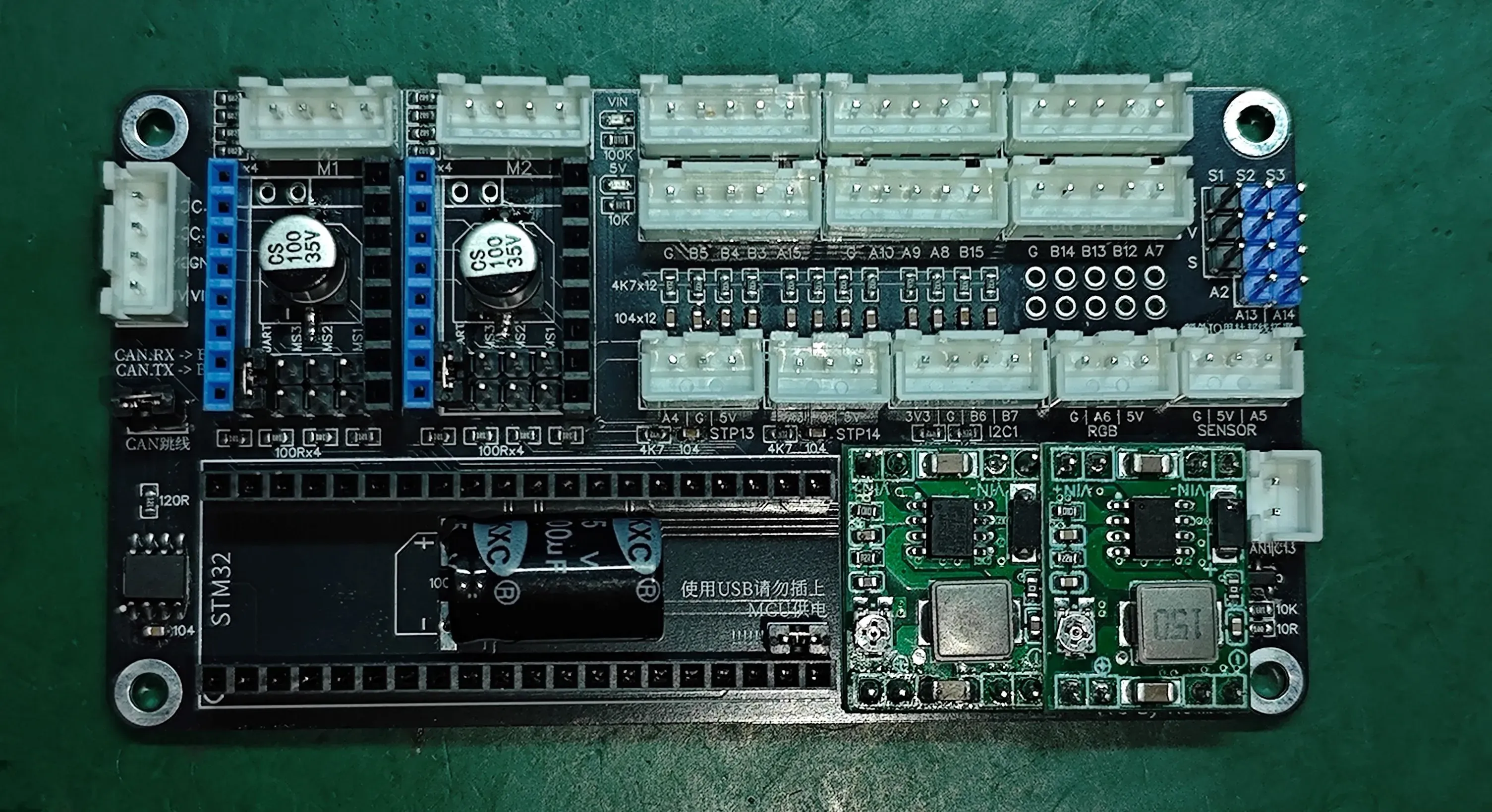
V1.1版本
C13/C14电容 35V/100uF 高度不要超过10mm,否则可能会和2209产生干涉
C16同理,不要超过10mm,可换10V/1000uF,或直接使用直插电容卧式摆放
使用的5V供电使用常见的降压模块,最高支持3A,背面ADJ用小刀切断后,把5V的用锡连上即可,如下图(搜索mini降压模块)
更新日志
V1.3.1
修改内容
- CAN和电源输入调整为 XH2.54 4P 不需要那么大的电流, 减少点成本
- 丝印调整为元件参数, 更好焊接一点
- 舵机独立供电, 调整为MP1584模块, 输入电压范围更宽松
- 预门限位调整为4个1组, 提供三组预门限位, 支持并联输入
- 增加2个支持模拟输入的限位输入
- 5V供电调整为MP1584模块, 且舵机独立, 避免大舵机引起的过冲烧毁编码器
- 额外两路舵机调整为SWD接口连接杜邦线连接才能使用(PA13/PA14)
功能验证
- [已验证] 2路步进电机接口(4988/2209),全UART支持
- [已验证] 14路限位
- [已验证] 1路TCRT5000红外传感器
- [已验证] 1路RGB接口
- [已验证] 1路可控风扇(AO3400 MOS)
- [已验证] 3路舵机(可作为引出IO)
- [已验证] 两路独立5V供电(单路最大3A,高负载请加散热片)
- [已验证] I2C预留
- [已验证] CAN BUS
问题补充
V1.1.1
修改内容
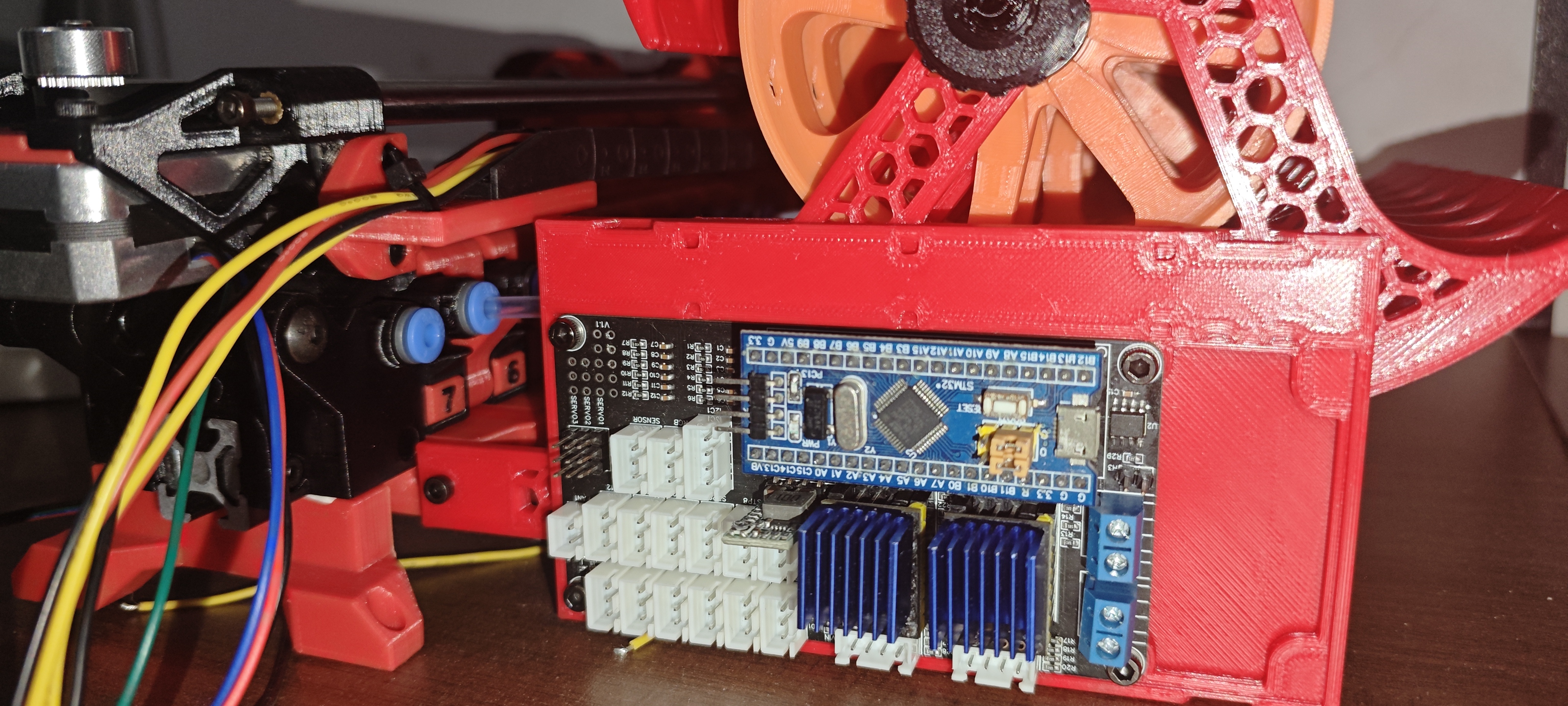
- 补充主板固定用的3D打印件,基于MMB主板简单修改,共两件,效果如下所示


V1.1
修改内容
- 修复风扇控制问题
- 调整部分接口引脚顺序,使其可以直插
- 增加VIN和5V电源指示灯
- 部分引脚丝印移动到背面,使布局更便于维护
- PCB四角倒角
- 移动I2C,使USB和I2C不再干涉
- 舵机插座由3P端子座改为3P排针
功能验证
- [已验证] 2路步进电机接口(4988/2209),全UART支持
- [已验证] 12路限位
- [已验证] 1路TCRT5000红外传感器
- [已验证] 1路RGB接口
- [已验证] 1路可控风扇(AO3400 MOS)
- [已验证] 3路舵机(可作为引出IO)
- [已验证] 独立5V供电(最大3A,高负载请加散热片)
- [已验证] I2C预留
- [未验证] CAN BUS
问题补充
- 暂无
V1.0
修改内容
- 初始版本
功能验证
- [已验证] 2路步进电机接口(4988/2209),全UART支持
- [已验证] 12路限位
- [已验证] 1路TCRT5000红外传感器
- [已验证] 1路RGB接口
- [已验证] 1路可控风扇(AO3400 MOS)
- [已验证] 3路舵机(可作为引出IO)
- [已验证] 独立5V供电(最大3A,高负载请加散热片)
- [未验证] I2C预留
- [未验证] CAN BUS
问题补充
- 有用到风扇电路需要调整一下,R30直接用一坨锡连上,R31更换为10K(也可能是我焊接的时候连烧两个MOS)
- 接口未按标准顺序留出,插的时候注意一下顺序
- 未预留电源指示灯
- 布局会导致维护较为不方便(烙铁可能会被端子座遮挡,导致焊不到贴片元件)
- PCB未倒角,边缘尖锐
- USB和I2C可能存在干涉
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









