


IronBen 四足轮腿机器人开源_R
简介
四轮腿机器人 GitHub: https://github.com/birdNb B站ID:进击的_鸟哥
简介:四轮腿机器人 GitHub: https://github.com/birdNb B站ID:进击的_鸟哥开源协议
:GPL 3.0
描述
作品其他相关文件:结构stp文件、打印切片文件、程序源码、强化学习相关的都在GitHub上(clone前别忘了点个星星哈,感谢了)。
GitHub: https://github.com/birdNb
作者Vx:17820079503 (商务合作/进交流群)
up主B站作品集合:Bird_Nb
(觉得不错的话别忘了关注、三连。呜呜呜求个赞赞好难)


以及合作伙伴:
PCB部分主要作者:@pppppoint
邮箱:2126358437@qq.com B站ID:硬件Point
1.项目简介
串行总线舵机: 型号:RX8-U50H-M 额定电压:12V 额定电流:5.5A 额定功率:66W 最小0.1°步进控制 额定扭矩
















硬件PCB分为两部分:1、机器人的核心板和拓展板(需要连接DJI A板子才能四轮部分)
2、体感控制手柄
一、核心板PCB设计
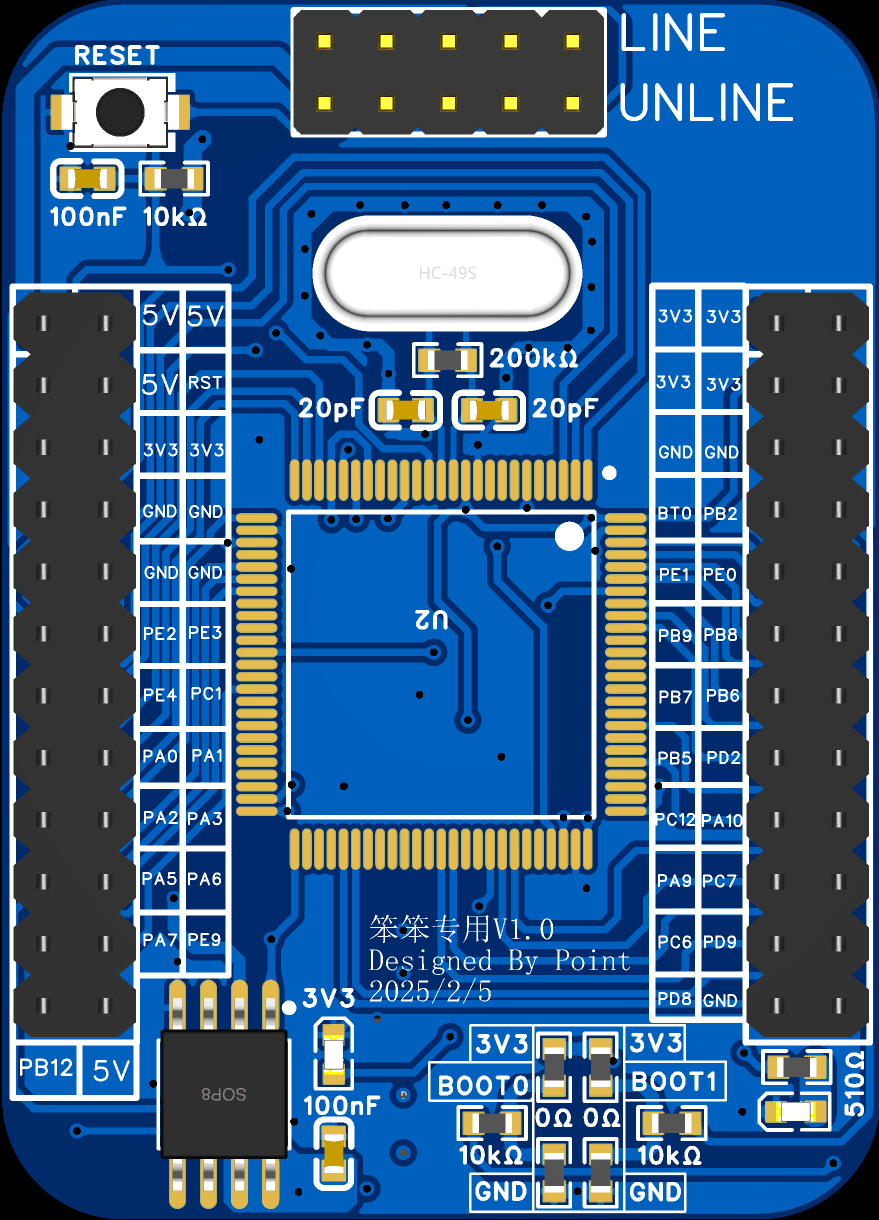
1. 创新集成架构
主控芯片:采用STM32F407VET6微控制器,搭载双电源输入(12V和5V)设计(图3-2),为两路舵机提供冗余供电,显著提升系统可靠性。
空间优化:集成多功能按键模块(三键合一),减少占用面积30%,支持一键烧录与状态切换。
存储扩展:外接W25Q64 Flash芯片,支持程序存储与实时数据缓存。
预留LORA远距离通信接口与SWD调试端口。
二、扩展板PCB设计
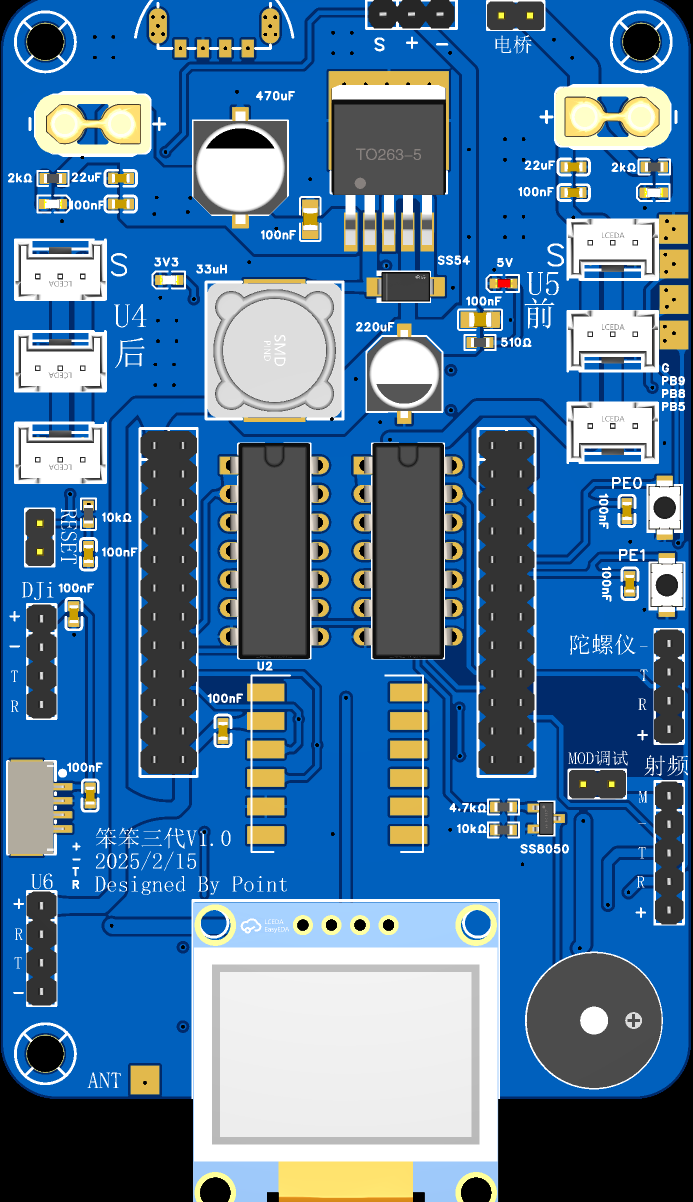
1. 多功能接口整合
通过I²C/串口连接陀螺仪、射频模块及大疆电机(图3-3)。
外设扩展:集成7路PWM输出、4个自定义串口,支持舵机群控(FASHIONSTAR RA8-U25总线舵机)与电机驱动。
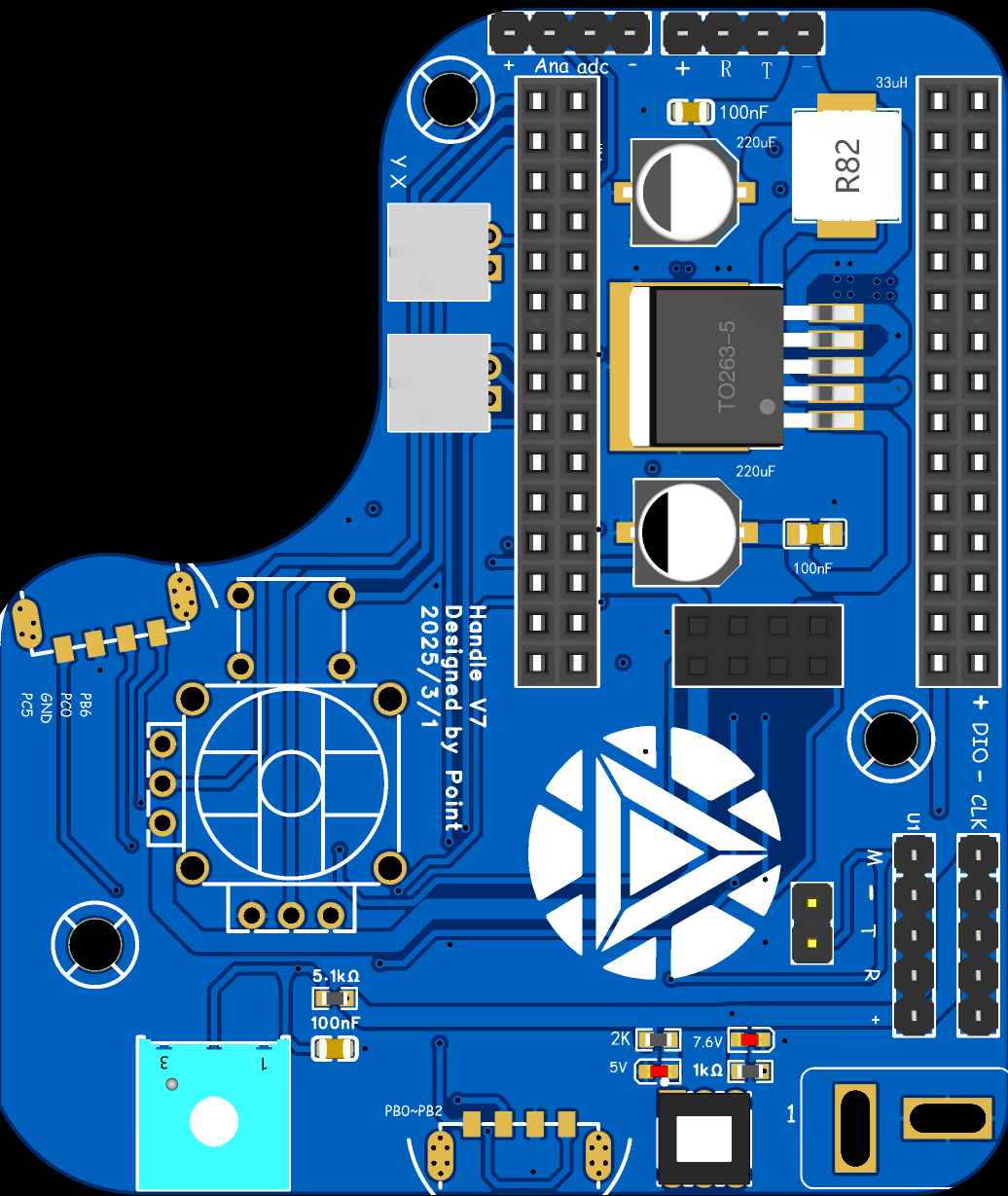
三、震动手柄PCB设计
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









