



ESP-Hi:ESP32-C3 超低成本 AI 对话机器狗
简介
基于 ESP32-C3 的 超低成本 AI 对话机器狗。支持多种 大模型 AI 对话,支持动作唤醒,显示彩色表情,十数种预编程动作。
简介:基于 ESP32-C3 的 超低成本 AI 对话机器狗。支持多种 大模型 AI 对话,支持动作唤醒,显示彩色表情,十数种预编程动作。开源协议
:GPL 3.0
描述
ESP-Hi:ESP32-C3 超低成本 AI 对话机器狗

项目简介
ESP-Hi 是一款基于 ESP32-C3 的 超低成本 AI 对话机器狗。通过接入大语言模型(如小智 AI),可以实现智能对话功能;内置水银开关可以感知晃动,实现唤醒和动作控制;集成了一个 0.96 寸的彩屏,用于显示表情,机器狗已实现十数种动作。通过对 ESP32-C3 外设的充分挖掘,仅需最少的板级硬件即可实现拾音和发声,同步优化了软件,降低内存与 Flash 占用,在资源受限的情况下同时实现了唤醒词检测与多种外设驱动。
视频展示
版本更新记录
- V1.2 (2026 年 4 月 02 日) :FPC2 换成了上接的封装,便于后盖开孔后连接外部设备。
- V1.1 (2025 年 5 月 21 日) :移除了外部唤醒芯片相关电路,取消了默认拼板,水银开关修改为默认不上件,增加了一个拓展接口。
- V1.0(2025 年 5 月 19 日):第一次开源版本。
关于固件
基础固件已打包在附件中,烧录地址为 0x00。
烧录步骤如下:
- 按住设备顶部的 Boot 按钮。
- 上电设备,使 ESP32-C3 进入下载模式。
- 烧录完成后,松开 Boot 按钮,重新上电即可运行程序。
小智固件:
请下载 xiaozhi-esp32 仓库,调用下面语句进行 ESP-HI 小智固件编译
python3 scripts/release.py esp-hi
当前固件支持功能:
- 唤醒词与按键唤醒:唤醒词 Hi, 乐鑫
- 接入平台:小智
- 功能支持:灯光控制、机器狗控制、网页控制
项目源码正在加紧整理中,开放时间请关注 ESP_Friends 动态,敬请期待!
功能展示
- 大模型 AI 对话功能
ESP-Hi 可以通过接入大语言模型,实现对话聊天功能,支持唤醒词,借助板载的 0.96 寸小屏,支持显示表情,目前已对接:小智AI。
其它平台正在陆续适配中...

具体实现代码开源在ESP-Friends 仓库中。
- 动作感知功能
ESP-Hi 这款 AI 玩具内置了一个水银开关,可以感知晃动的速率,从而实现唤醒/打断对话/执行动作等。

- 机械狗功能
ESP-Hi 通过 USB Type-C 接口连接舵机底座后,就可以变身为一个 AI 机械狗,在机械狗控制组件中已实现数十种动作,此外,机械狗底座集成了电池管理功能。

- 网页控制
ESP-Hi 还支持通过网页控制 Servo Dog,可以在网页端远程遥控机械狗前进后退左转右转,以及 12 种预设动作。并支持了在网页端进行舵机调平。
如何进入:
- 首先将 ESP-HI 进行小智配网。
- 手机/PC 连接到同一 Wi-Fi 下
- 在游览器中访问 http://esp-hi.local 或者 esp-hi.local 或者 ESP-HI 的 IP 地址 即可进入网页后台
基础动作控制:
- 按下按钮可以进行基础动作控制,随时可打断
- 在空白区域按下并拖动可以控制狗子的前进,后退,左转,右转

舵机校准:
- 舵机校准模式下,可以将机器狗的四条腿调平。请务必阅读校准说明。

3D 结构设计
> 所有的结构件文件都开源在附件中,欢迎下载复刻!!!
ESP-Hi 本体 3D 结构
ESP-Hi 本体采用层叠式设计,本体由一块 ESP-Hi MainBoard PCB(板厚为 1.2mm)、两个 3D 打印结构件(一个外壳、一个遮光消噪结构件)、一块正面亚克力面板(厚度为 1mm)组成。

ESP-Hi 机器狗底座 3D 结构
ESP-Hi 机器狗底座部分由一块 ServoDogBoard PCB 板、4 个 3D 打印零件、一块 702040 500mAh 锂离子电池、4 个 180 度 SG92R 舵机组成,3D 结构爆炸视图如下:

复刻教程
在本体装配前请准备以下材料:
| 序号 | 描述 |
|---|---|
| 1 | 3D 打印零件 |
| 2 | M2*4mm 自攻螺丝 |
| 4 | ESP-Hi MainBoard |
| 5 | 2014B 扬声器 |
| 6 | 打印面板 |
在机器狗底座装配前请准备以下材料:
| 序号 | 描述 |
|---|---|
| 1 | 3D 打印零件 |
| 2 | 4 个 180 度 SG92R 舵机 |
| 4 | ServoDogBoard |
| 5 | 702040 500mAh 锂离子电池 |
| 6 | 数颗 M2 螺丝和舵机自带螺丝包 |
投板注意事项:
- 打板请选择板厚 1.2mm
硬件装配
ESP-Hi 本体装配
本体结构件较少,装配时先将扬声器固定在结构件上,然后将 PCB 固定到打印外壳上,注意天线与外壳的距离很近,装配时请先将左侧和顶部嵌入外壳中,然后利用3D打印外壳韧性将 USB 口放入外壳中。

装配完成图:

由于 PCB 和打印面板间还有较大的空隙,因此必须使用遮光消噪结构件来降低麦克风拾音噪声。
显示屏需要粘贴在亚克力面板上,为避免徒手贴歪,在附件中提供了一个屏幕辅助粘贴治具,推荐先将屏幕固定到治具上,然后粘贴屏幕并取下。

机器狗底座装配
在装配前需要事先准备好所有 3D 打印件。
第一步:将 PCB 板、电池和四个舵机依次装入底部外壳中,装配后的效果图如下:

需要注意:装配舵机时,舵机的引脚顺序别接错了,请按照 PCB 板上的丝印标号进行插接,装配示意图如下:

第二步:装上 PCB 前盖板,效果如下:

第三步:装上外壳上盖。
第四步:将舵机配件包里最小的舵臂用最小的螺丝固定在 3D 打印腿上,效果如下:

第五步:也是最后一步,将腿装在舵机上,并用螺丝进行固定。
硬件电路设计说明
本体电路设计
ESP-Hi 硬件部分主要包含电源管理、MCU、音频、显示和舵机机械狗五个部分,总体硬件框图如下:

供电方式
ESP-Hi 使用 USB-Type-C 供电,使用 RT9013 将电压降低为 3.3 V 电压供 MCU 与音频使用。由于 ESP32-C3 Wi-Fi 发包时瞬态电流较高,可能会影响麦克风音频播放与拾音效果,因此推荐使用负载调整率尽可能低的 LDO 或者 DCDC 芯片。为了防止电源噪声引入麦克风端,需要添加额外低通滤波电路分离麦克风与 MCU 电源轨。

音频
ESP-Hi 拾音采用驻极体咪头作为拾音设备,使用跨阻抗放大器将驻极体麦克风的输出电流转换为输出电压,经过电阻偏置后送到 ESP32 的 ADC。由于 ESP32-C3 的电压采集范围约 0 ~ 1 V,放大倍数请根据所选用咪头实际的灵敏度调整 R18。

发声部分采用 I2S-PDM 信号直出,为了避免 Wi-Fi 传输对输出信号的干扰,采用差分的方式进行传输。经过 RC 滤波后经音频运放 NS4150B 放大输出,输出的放大倍数设定为 7.2 倍。

机械狗底座电路设计
舵机机械狗底座由四个舵机构成,同时集成了电池管理功能,舵机控制线通过 USB-C 直连到 ESP-Hi 本体。舵机由电池直接供电,底座对本体供电由电池电压泵升到 5 V,从而避免了舵机在执行动作时,电池电压波动对系统的影响。
底座硬件框图如下:

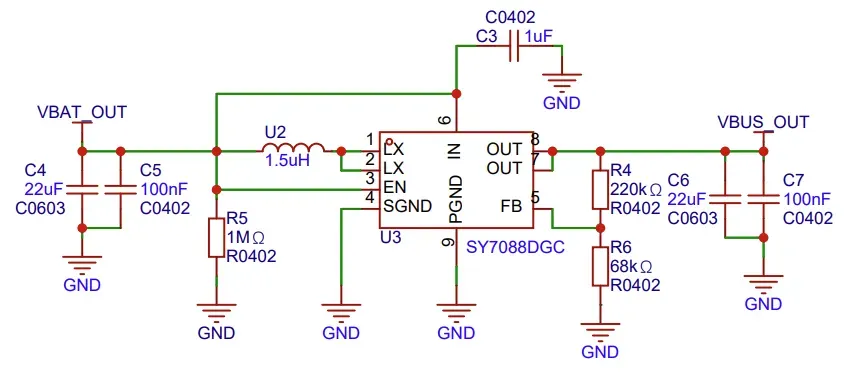
电池电压升压电路
由于舵机直接由电池进行供电,为防止舵机工作时电压不稳定影响 ESP-Hi 本体的正常工作,需要将电池电压升压至 5V 后再供给 ESP-Hi 本体,升压电路如下:
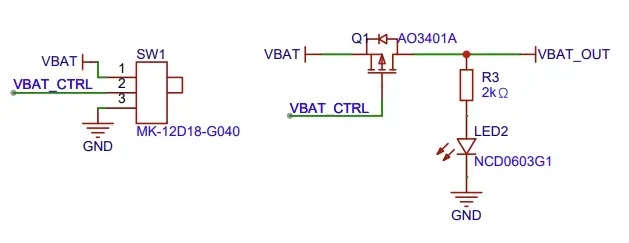
电源开关电路
舵机工作时电流较大,尤其是 4 个同时工作时,而额定工作电流大的拨动开关体积都偏大,无法满足机器狗的结构设计。因此,在本项目中采用小开关和一个 MOS 组合的开关电路,具体电路如下:
物料清单
ESP-Hi主体物料清单:
ESP-Hi 舵狗物料清单:
机器狗底座物料清单:
- 702040 聚合物锂电池
- 180 度 SG92R 舵机
- 公头 Type-C 贴片插头 TC-005
- 其他 PCB 物料自行搜索购买即可
QQ 交流
ESP_Friends 交流群:
- 0 群(已满):813935663
- 1 群(已满):1032430870
- 2 群(已满):939405364
- 3 群(已满):480486715
- 4 群(已满):807521569
- 5 群:1054806943
入群回答密码:ESP_Friends
购买方式
目前已经部分个人卖家售卖成品或散件,如果不想复刻,可在淘宝搜索“esp-hi”进行购买
已知问题
1.当前麦克风的位置在打印件内,容易因空腔声音振荡导致音质变差,如果想取得最佳的拾音效果,麦克风推荐直接粘贴在前面板上,然后使用线连接到 PCB 上。
2.舵机底板USB CC1/CC2 线需要分别接一个 5.1K 电阻对地。否则使用 USB C-C 的线无法正常充电。
如果你在复刻之后发现有问题,欢迎评论指正!!!
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









