


Roboto全开源人形机器人
简介
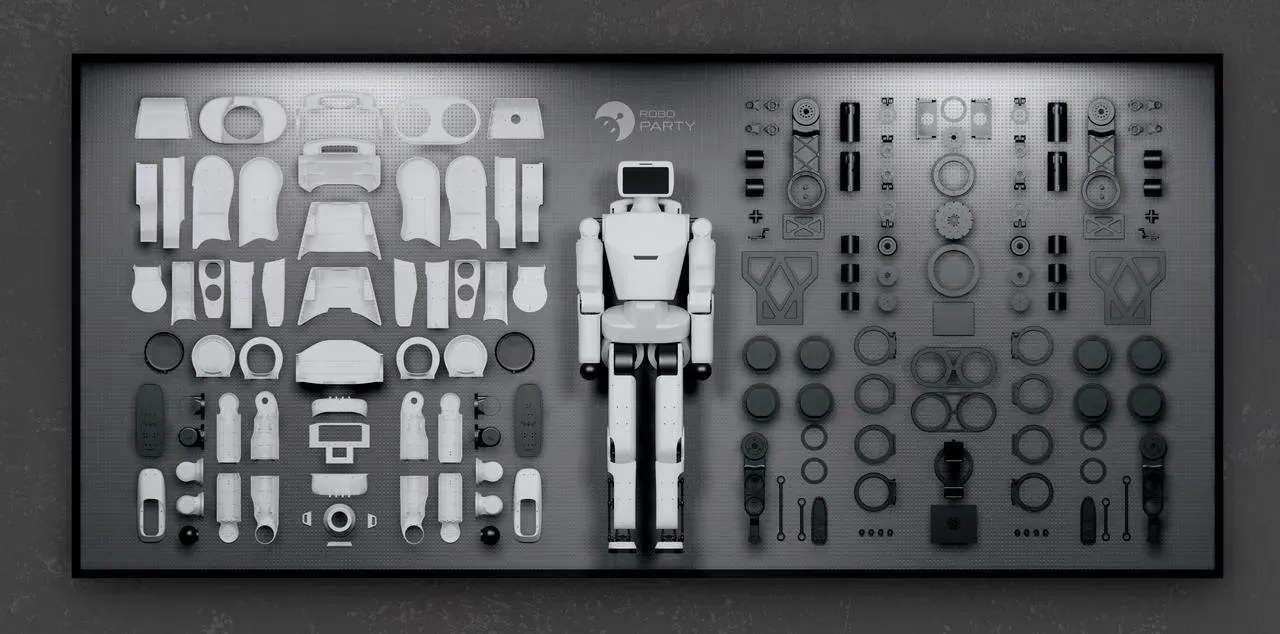
萝博头原型机支持全嘉立创打样,个人可手搓组装,配合开源训练与部署代码,轻松实现行走、跑步等基础功能。全开源设计,未来将开放更多算法与创意工坊,由社区共同定义其能力边界。
简介:萝博头原型机支持全嘉立创打样,个人可手搓组装,配合开源训练与部署代码,轻松实现行走、跑步等基础功能。全开源设计,未来将开放更多算法与创意工坊,由社区共同定义其能力边界。开源协议
:GPL 3.0
描述
关于我们
我们是 RoboParty,上海萝博派对科技有限公司,成立于2025年2月21日。四月份我们开始正式做人形机器人,经历四个月完成了原型机的研发,也就是这台萝博头原型机。我们一直秉持着开源的理念,ROBOTO_ORIGIN的全研发流程和全部的结构、电气、训练、部署都进行了开源。
随着我们逐步推进新机器人的研发,我们发现一台高性能的机器人远远不是手搓所能达到的,所以我们决定将这台能跑能跳的原型机正式开源,以记录我们的来时路。
萝博头原型机可以完全通过淘宝采购和嘉立创打样(一键复刻)完成,真正仅靠自己手搓便能完全组装。依靠我们提供的开源训练代码和部署代码,能轻松实现行走跑步的基础功能。后续我们也将逐步把我们在这台机器人上实现的更多算法添加到开源仓库中。在此之上,作为一台全开源机器人,它的功能可以由广大开发者和使用者定义,因此,创意工坊也会稍后上线。
交流群
QQ群: 1078670917
微信群已满200人,请加tcmofashi_1手动邀请进群

关于本仓库
本仓库为萝博头原型机的核心子仓库的快照,将会每日更新以方便一次拉取全部资源。
重要说明: 本仓库 roboto_origin 仅作为快照聚合仓库,所有问题反馈和代码贡献应前往对应的子仓库中进行。
贡献方式
如果您希望为项目做出贡献,请根据贡献内容选择对应的子仓库:
| 子仓库 | 贡献方向 |
|---|---|
| Atom01_hardware | 机械结构设计、CAD图纸、PCB设计、BOM改进 |
| atom01_deploy | ROS2驱动开发、中间件模块、部署配置、IMU/电机集成 |
| atom01_train | 强化学习算法、训练环境、仿真配置、Sim2Sim迁移 |
| atom01_description | URDF运动学/动力学描述、视觉/碰撞网格、关节参数优化 |
详细贡献指南请点击这里: CONTRIBUTING_CN.md
 |  |
|---|
资源指引
仓库模块
| 模块名称 | 介绍 | 仓库链接 |
|---|---|---|
| Atom01_hardware | Atom01机器人的硬件设计文件,包含结构图纸和设计资料 | https://github.com/Roboparty/Atom01_hardware |
| atom01_deploy | ROS2部署框架,提供模块化架构的中间件,用于机器人部署和控制,支持IMU、电机驱动、推理等功能 | https://github.com/Roboparty/atom01_deploy |
| atom01_train | 基于IsaacLab的直接训练工作流,提供高透明度和低重构难度的强化学习训练环境,支持Sim2Sim迁移到MuJoCo | https://github.com/Roboparty/atom01_train |
| atom01_description | Atom01机器人的URDF模型文件,包含机器人运动学和动力学描述,用于仿真和可视化 | https://github.com/Roboparty/atom01_description |
快速开始
## 克隆仓库
git clone https://github.com/Roboparty/roboto_origin.git
## 更新仓库
git pull
进入各模块目录 modules/...,按照模块内 README 指引即可。
行为准则
本项目已采用行为准则来营造欢迎和包容的社区环境。所有贡献者和用户都应遵守这些准则。
本项目采用 GNU General Public License Version 3 (GPLv3) 许可证。详见 LICENSE 文件。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









