

高性价比超低零漂六轴双IMU模块-BMI088+BMI270
简介
用于Robomaster机器人竞赛的IMU六轴模块。零漂<10°/h,校准良好时可达3°/h。单块成本50左右,开源包含PCB以及可烧录的固件。支持串口/USB/CAN通信,提供例程与ROS包。
简介:用于Robomaster机器人竞赛的IMU六轴模块。零漂<10°/h,校准良好时可达3°/h。单块成本50左右,开源包含PCB以及可烧录的固件。支持串口/USB/CAN通信,提供例程与ROS包。开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
文档与固件地址:https://github.com/xrobot-org/atom-sdk
1M电阻用于短接,无需焊接。SWDIO的1K上拉可选。同时可以根据需求选择是否焊接XT30接口与DC-DC降压部分电路。
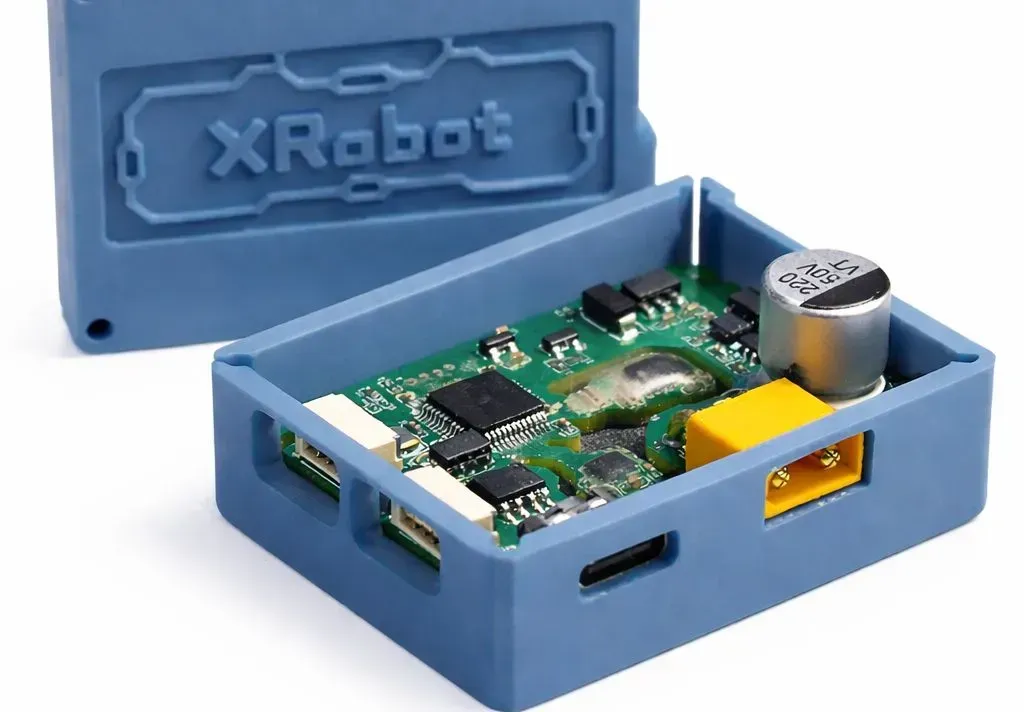
ATOM-IMU 模块 V5.3
参数
- 输出频率:2-2000Hz
- 支持电压:5V/24V
- 接口:USB / UART / CAN
- 支持数据类型:加速度计 (ACC) / 陀螺仪 (GYRO) / 欧拉角 (EULR) / 四元数 (QUAT)
- UART 波特率:2M (数据)
- CAN 波特率:1M
- 陀螺仪:最大量程 ±2000DPS
- 加速度计:最大量程 ±24G
usb接口会在电脑上枚举出两个CDC虚拟串口,分别为命令行与数据输出。虚拟串口输出的IMU数据与硬件串口格式相同。
不建议使用USB转TTL连接硬件串口。硬件串口波特率较高,需要选择支持此波特率(2M)的USB转TTL模块。模块自带的USB接口延迟更低,速度更快。
Yaw轴零漂测试
零偏通常在10°/h以下,校准环境较好时可达3°/h以下。
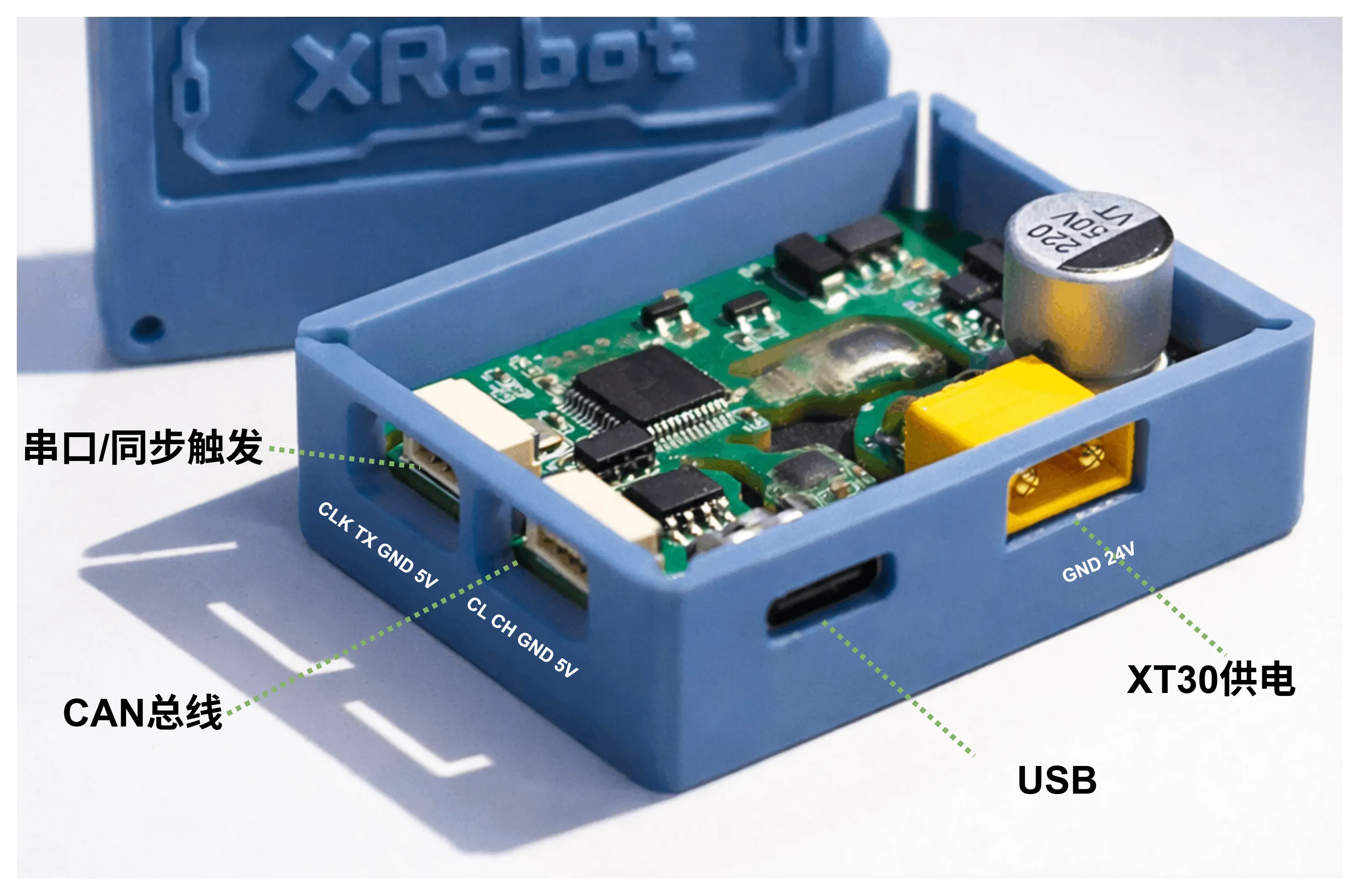
连接方式
- USB:
UART1(数据输出) UART2(命令行) - UART GH1.25 4P:
1: SYNC / FSYNC(可配置为输入或输出)2: TX3: GND4: +5V_IN
- CAN GH1.25 4P:
1: CANL2: CANH3: GND4: +5V_IN
- XT30 供电:
24V_IN
示例代码
├── linux_uart_example `Linux UART 解析示例`
├── ros_imu_publisher `ROS IMU 发布节点`
├── ros_imu_subscriber `ROS IMU 订阅节点`
├── ros_rviz_example.rviz `ROS RViz 可视化`
└── stm32_can_example `STM32 CAN 解析示例(5.3不支持CANFD)`
Linux UART 示例
编译并运行示例:
gcc main.c -o main
./main
ROS 示例
VERSION=rolling
发布
colcon build
source install/setup.zsh
ros2 run imu_publisher node_imu
订阅
colcon build
source install/setup.zsh
ros2 run imu_subscriber node_imu
RViz 可视化
使用 ros_rviz_example.rviz 在 RViz2 中打开。
STM32 CAN 示例
make
终端交互
使用 picocom、putty、MobaXTerm 等工具进行交互,连接USB枚举出的第二个串口设备即可。
示例操作:
linux@XRobot:~$ ls /dev/ttyACM*
/dev/ttyACM0 /dev/ttyACM1
linux@XRobot:~$ picocom /dev/ttyACM1
回车后示例输出:
XRobot:/$
IMU 设置
## 输入set_imu命令并回车
XRobot:/$ set_imu
## 这一行显示IMU CAN输出的状态,CAN/UART输出同时只能有一个开启
can output disabled.
## 这一行显示IMU 串口输出的状态
uart output enabled.
## 这一行表示帧同步信号FSYNC的模式:
# 0=不启用
# 1=检测上升沿
# 2=检测下降沿
# 3=同时检测上升沿/下降沿
# 4=输出FSYNC时钟(UART口 SYNC/FSYNC 引脚输出)
## 第二个数字代表最近一次FSYNC事件的时间(微秒)
## 第三个数字代表最近一次IMU数据时间戳(微秒)
FSYNC:4 6685000 6690413
## 当 fsync=4(输出)时,会额外显示输出分频参数(Div)
Div:10
## 这一行显示两次反馈数据的时间间隔,单位500us
feedback delay:1
## 这一行显示IMU数据帧的ID
id:48
Usage:
set_delay [time] 设置发送延时 1=500us
set_div [div] 设置clk_out(FSYNC)分频
set_can_id [id] 设置can id
just_float 设置vofa+ just_float输出
# accl/gyro/quat/eulr只对can模式发送有效
enable/disable [accl/gyro/quat/eulr/can/uart]
fsync [0: disable 1: rise 2: fall 3: both 4: output] 设置fsync模式
校准(Calibration)
完整校准过程约需 20 分钟,过程中需要保证 IMU 稳定,每次更改IMU方向后需要等待1分钟以上来使角度稳定。校准的每一步都无顺序要求,可以多次尝试。
## 上电后等待十分钟,IMU预热
XRobot:/$ imu1 show 600000 1000
## IMU平放,LOGO面朝上
XRobot:/$ imu1 cali
...
## 校准误差绝对值在0.00003以下视为校准成功,理想情况下应当小于0.000015
Calibration error -0.000013
Calibration data saved.
## 更改方向,USB接口面朝下
XRobot:/$ imu1 cali
...
## 侧放IMU,使GH1.25接口朝上
XRobot:/$ imu1 cali
...
## 再次将IMU平放,LOGO面朝上
XRobot:/$ imu2 cali
...
## 搜索得到当地的经纬度,可在谷歌地图中直接右键复制。例如格拉斯哥的经纬度为:55.87241068336635 -4.290120205979219
XRobot:/$ ahrs set_location 55.87 -4.29
Done.
## 校准完成
测量零漂
仅作参考,以实际情况为准
XRobot:/$ ahrs test
Please keep the device steady, start measurement
Please wait
Zero offset:-0.035189°/min
VOFA+ 可视化数据
请添加以下自定义命令,使用VOFA+可视化数据。
数据分别为:w x y z pitch roll yaw
ahrs print_quat 1000000 10\r\n
调整恒温温度
## 设置恒温温度
## 两个IMU温度同步,修改一个即可
XRobot:/$ imu1 set_temp 45
## 重新上电并校准
FSYNC 输入模式(fsync=1/2/3)
根据触发模式的不同,Data.sync会记录输入信号的边沿触发时间。
FSYNC 输出模式(fsync=4)
当 fsync 设置为 4 时,模块会在 UART GH1.25 的 1 号脚(SYNC/FSYNC) 输出方波时钟,用于外部同步。
Data.sync字段记录最近一次 FSYNC 输出上升沿所对应的 IMU 采样结束/数据就绪时间戳(微秒)Data.sync仅在 FSYNC 上升沿发生时更新,其余数据帧会保持为“最近一次上升沿对应的sync值”- FSYNC 输出上升沿相对
Data.sync的延迟约为 8.5µs(典型值) - 输出分频由
set_div [div]控制(仅fsync=4时生效) set_delay [delay]为发送/反馈节拍,单位 500µs(delay=1即 500µs)- 在当前固件中,内部数字滤波带来的群延迟典型值约为 1.5ms
输出周期计算:
- 翻转间隔:
500µs × delay × div - 方波周期:
500µs × delay × div × 2
示例:delay=2(1ms),div=5
方波周期 = 500µs × 2 × 5 × 2 = 10ms,即 100Hz。
路径延迟
在当前配置下,IMU 采样周期约为 500µs。
IMU 采样结束到 FSYNC 输出上升沿需要约 8.5µs。
例如使用 FSYNC 触发相机采集时:
- IMU 采样时间中点约为:
Data.sync - 250µs - 相机采集时间中点约为:
Data.sync + 8.5µs + 相机触发上升沿延迟 + 曝光时间/2
因此可结合 Data.sync 与 Data.time,在 IMU 数据流中选择距离相机采集时间中点最近的 IMU 数据帧。
此外,更改 set_delay [delay] 或 set_div [div] 均会在当前周期结束后生效,运行时更改不会导致相位偏移。
因此可通过调整 div,并同时监控相机帧时间差与IMU 数据时间差(相对上一帧的 Δt)来对齐相机与 IMU 数据。
传输协议
UART 协议
- 数据帧包括:前缀,微秒时间戳(time),同步时间戳(sync),四元数,角速度,加速度,欧拉角,CRC8 校验。
typedef struct __attribute__((packed)) {
float x;
float y;
float z;
} Vector3;
typedef struct __attribute__((packed)) {
float q0;
float q1;
float q2;
float q3;
} Quaternion;
typedef struct __attribute__((packed)) {
float yaw;
float pit;
float rol;
} EulerAngles;
typedef struct __attribute__((packed))
{
uint8_t prefix;
uint64_t time : 40;
uint64_t sync : 40;
Quaternion quat_;
Vector3 gyro_;
Vector3 accl_;
EulerAngles eulr_;
uint8_t crc8;
} Data;
CAN 协议
#define ENCODER_21_MAX_INT ((1u << 21) - 1)
#define CAN_PACK_ID_ACCL 0
#define CAN_PACK_ID_GYRO 1
#define CAN_PACK_ID_EULR 3
#define CAN_PACK_ID_QUAT 4
typedef union {
struct __attribute__((packed)) {
int32_t data1 : 21;
int32_t data2 : 21;
int32_t data3 : 21;
int32_t res : 1;
};
struct __attribute__((packed)) {
uint32_t data1_unsigned : 21;
uint32_t data2_unsigned : 21;
uint32_t data3_unsigned : 21;
uint32_t res_unsigned : 1;
};
uint8_t raw[8];
} CanData3;
typedef struct __attribute__((packed)) {
union {
int16_t data[4];
uint16_t data_unsigned[4];
};
} CanData4;
typedef struct {
struct {
float x, y, z;
} accl;
struct {
float x, y, z;
} gyro;
struct {
float pitch, roll, yaw;
} eulr;
struct {
float w, x, y, z;
} quat;
uint64_t timestamp;
uint64_t sync_time;
} ImuData;
ImuData imu_data;
static float DecodeFloat21(uint32_t encoded, float min, float max) {
float norm =
(float)(encoded & ENCODER_21_MAX_INT) / (float)ENCODER_21_MAX_INT;
return min + norm * (max - min);
}
static float DecodeInt16Normalized(int16_t value) {
return (float)value / (float)INT16_MAX;
}
static void ProcessClassicCanPacket(uint32_t id, uint8_t *data) {
uint32_t packet_type = id - IMU_DEVICE_ID;
switch (packet_type) {
case CAN_PACK_ID_ACCL: {
/* Accelerometer data: ±24g range */
CanData3 *can_data = (CanData3 *)data;
imu_data.accl.x = DecodeFloat21(can_data->data1_unsigned, -24.0f, 24.0f);
imu_data.accl.y = DecodeFloat21(can_data->data2_unsigned, -24.0f, 24.0f);
imu_data.accl.z = DecodeFloat21(can_data->data3_unsigned, -24.0f, 24.0f);
break;
}
case CAN_PACK_ID_GYRO: {
/* Gyroscope data: ±2000 deg/s converted to rad/s */
CanData3 *can_data = (CanData3 *)data;
float min_gyro = -2000.0f * M_PI / 180.0f;
float max_gyro = 2000.0f * M_PI / 180.0f;
imu_data.gyro.x =
DecodeFloat21(can_data->data1_unsigned, min_gyro, max_gyro);
imu_data.gyro.y =
DecodeFloat21(can_data->data2_unsigned, min_gyro, max_gyro);
imu_data.gyro.z =
DecodeFloat21(can_data->data3_unsigned, min_gyro, max_gyro);
break;
}
case CAN_PACK_ID_EULR: {
/* Euler angles: ±π rad */
CanData3 *can_data = (CanData3 *)data;
imu_data.eulr.pitch = DecodeFloat21(can_data->data1_unsigned, -M_PI, M_PI);
imu_data.eulr.roll = DecodeFloat21(can_data->data2_unsigned, -M_PI, M_PI);
imu_data.eulr.yaw = DecodeFloat21(can_data->data3_unsigned, -M_PI, M_PI);
break;
}
case CAN_PACK_ID_QUAT: {
/* Quaternion data: normalized int16 */
CanData4 *can_data = (CanData4 *)data;
imu_data.quat.w = DecodeInt16Normalized(can_data->data[0]);
imu_data.quat.x = DecodeInt16Normalized(can_data->data[1]);
imu_data.quat.y = DecodeInt16Normalized(can_data->data[2]);
imu_data.quat.z = DecodeInt16Normalized(can_data->data[3]);
break;
}
default:
/* Unknown packet type */
break;
}
}
bootloader烧录
参考文档链接指向的github仓库
固件更新
-
获取最新固件:参考
firmware目录。 -
进入 Bootloader 模式:
power bl -
重新插拔USB接口
-
进入此网站:ATOM-IMU 固件更新,根据提示操作
-
重新插拔USB接口
相关资源
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









