




描述
项目详细介绍视频链接:https://www.bilibili.com/video/BV1V7421R712/?spm_id_from=333.999.0.0
硬件设计
单片机:STM32F103C8T6
电源方案:7.4V-12V输入,通过XL4005E1输出5V给舵机供电,再通过RT9013输出3.3V给单片机供电
通信:NRF24L01
舵机驱动:方案一:直接通过2个定时器产生8路PWM输出;方案二:通过IIC与PCA9685通信,驱动舵机
程序设计要点
- 产生摆线方程,生成足端轨迹规划
sigma=2pi(t-t_T)/(faaiTs);
Xep=((xf-xs)(sigma-(sin(sigma))))/(2pi)+xs;
Zep=h(1-cos(sigma))/2; - 运动学逆解(余弦定理、勾股定理)
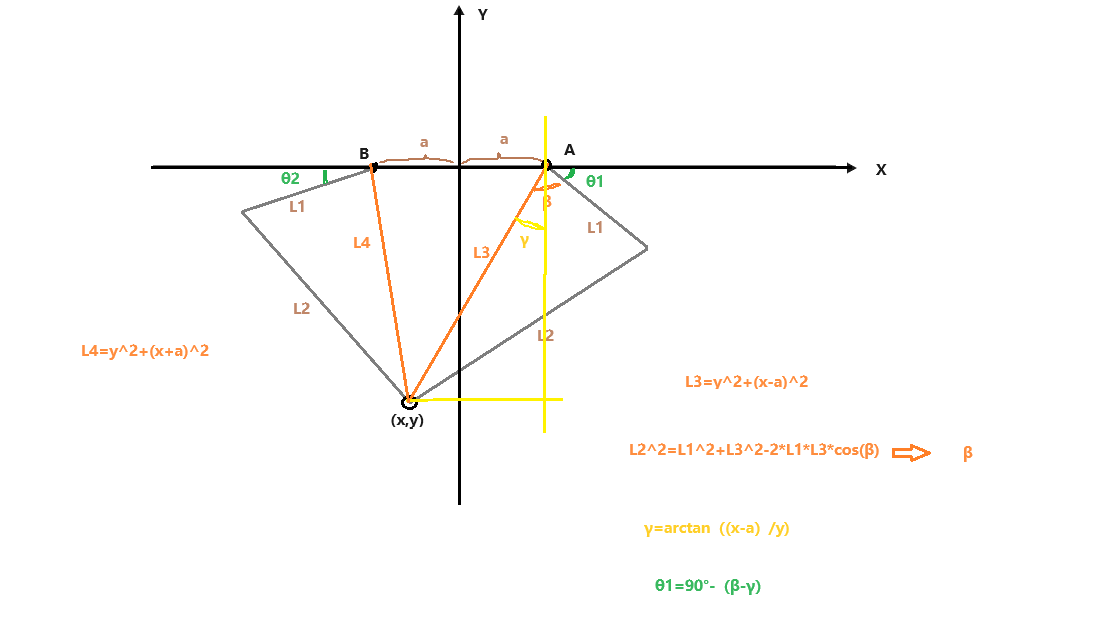
A、B分别为两个舵机输出轴心,它们相距距离为2a。足端坐标(x,y)由轨迹规划而来。L1,L2为腿部的上臂和下臂臂长。
θ1和θ2才是我们需要求解的舵机转动角度。
而θ1=90°-(β-γ),所以求解顺序为:L3→β→γ
- 用MPU6050传感器反馈数据来实现姿态控制
注意事项
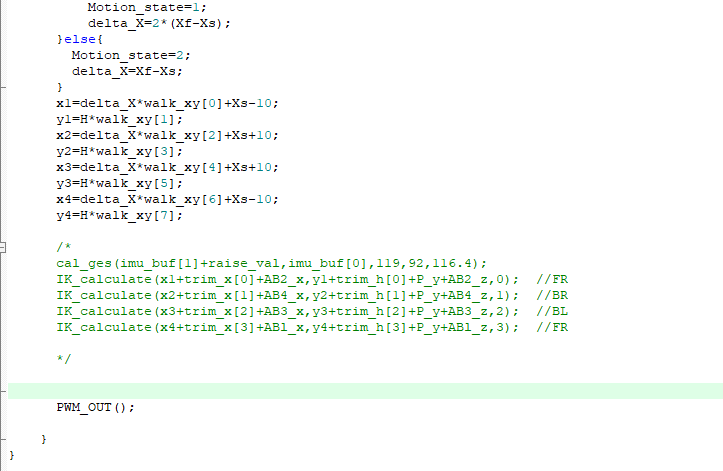
- 组装舵机前,先下载舵机回中位的程序,即将 main.c中的这部分注释掉,如图
- 注意舵机引脚分配:FR-前→A6,FR-后→A7;BR-前→B0,BR-后→B1;BL-前→B8,BL-后→B9;FL-前→B6,FL-后→B7
- 后面还会出详细教程……待续
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









