


KT-FMU-F1 基于STM32H743的高性能飞控
简介
基于STM32H743的高性能飞控
简介:基于STM32H743的高性能飞控开源协议
:GPL 3.0
描述
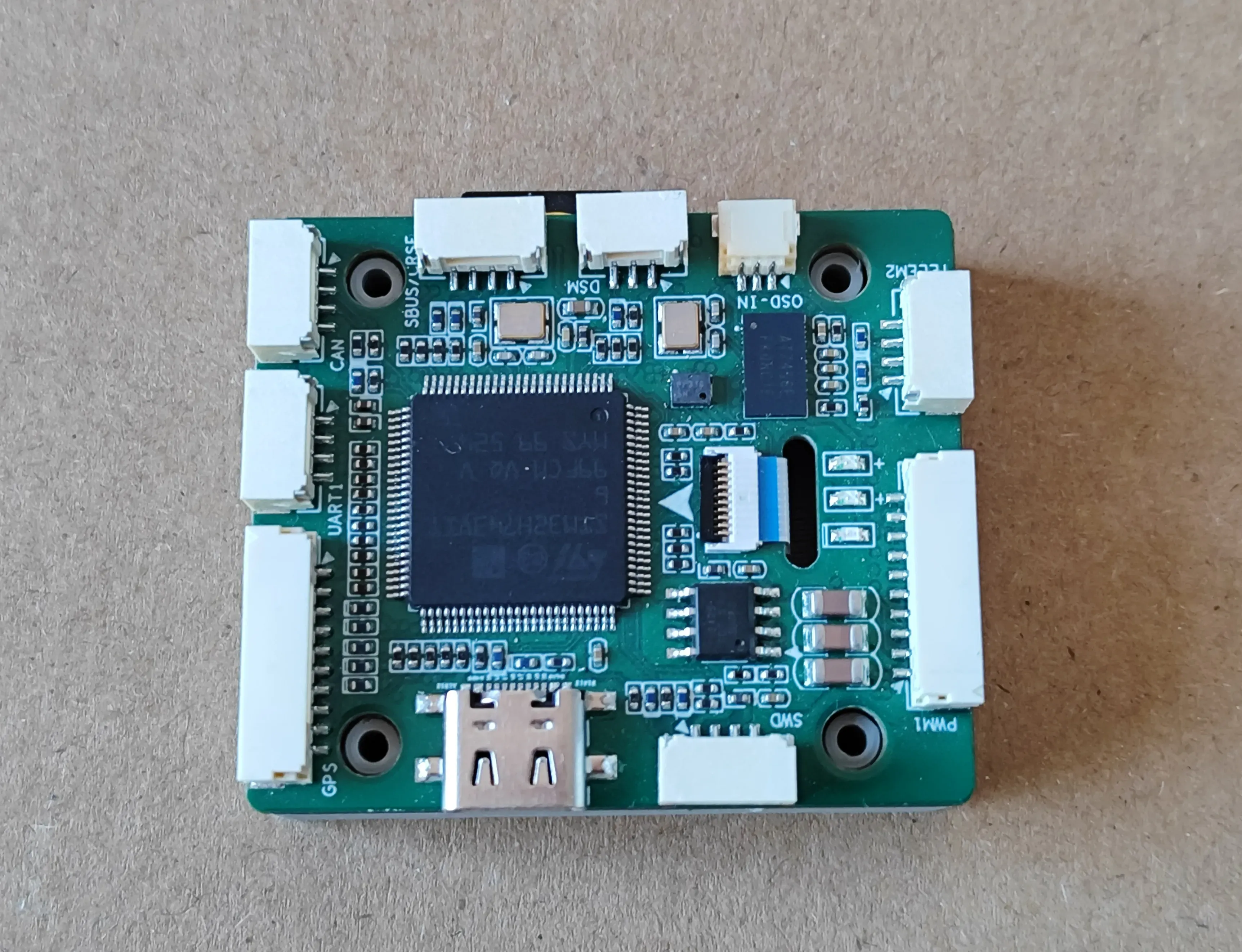
KT-FMU-F1
KT-FMU-F1是由酷天(厦门)微电子设计的一个开源飞控。
特性
- 主控: STM32H743VI with Cortex-M7 CPU
- IMU: BMI088 + BMI270
- 磁力计: IST8310
- 气压计: DPS310
- 字符叠加: AT7456E
- 接口:
- 7x UARTs (4个用于通信, 1个连接遥控接收机, 1个连接电调, 1个连接GPS模块)
- 10x PWM输出
- 电池电压输入: 2S - 8S
- 2x IIC
- 1x CAN
- 1x USB
- 1x MicroSD卡槽
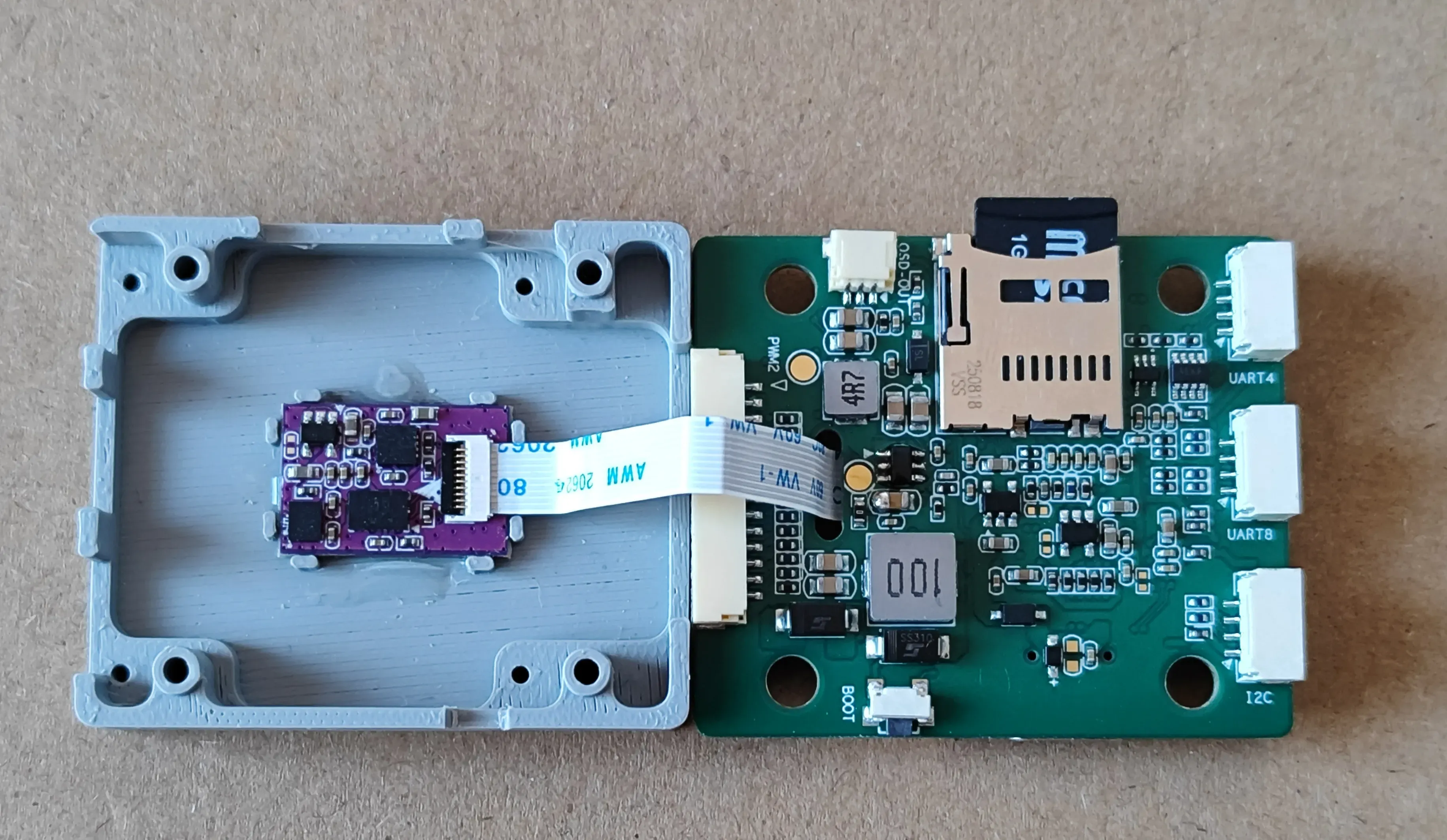
IMU和磁力计在一个独立的小板上,通过FFC排线连接到飞控主板。
接口
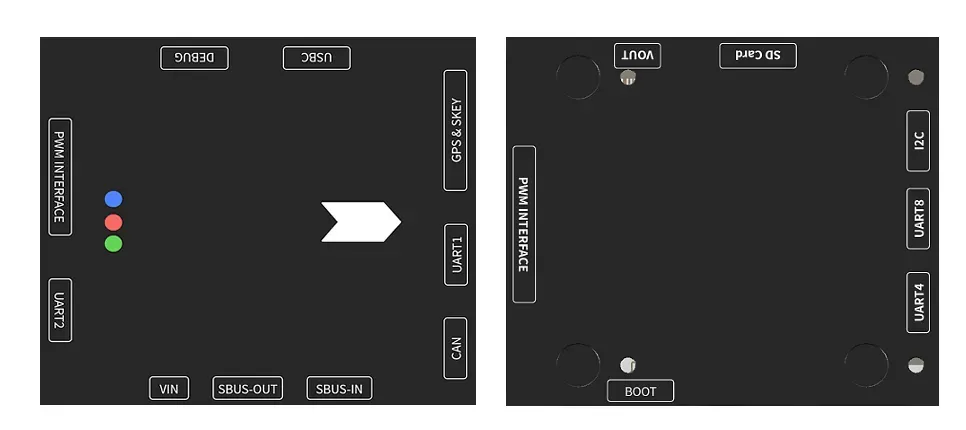
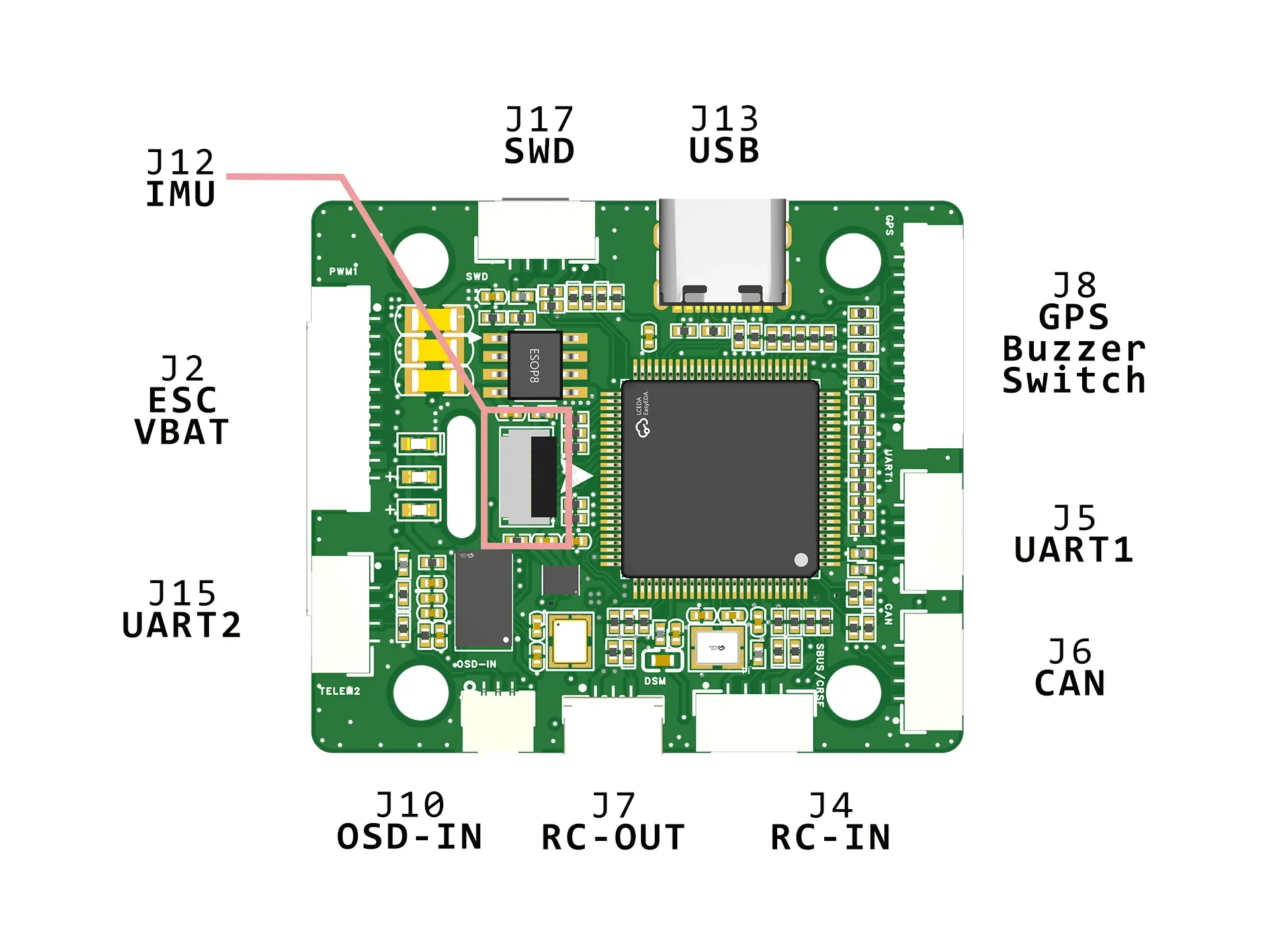
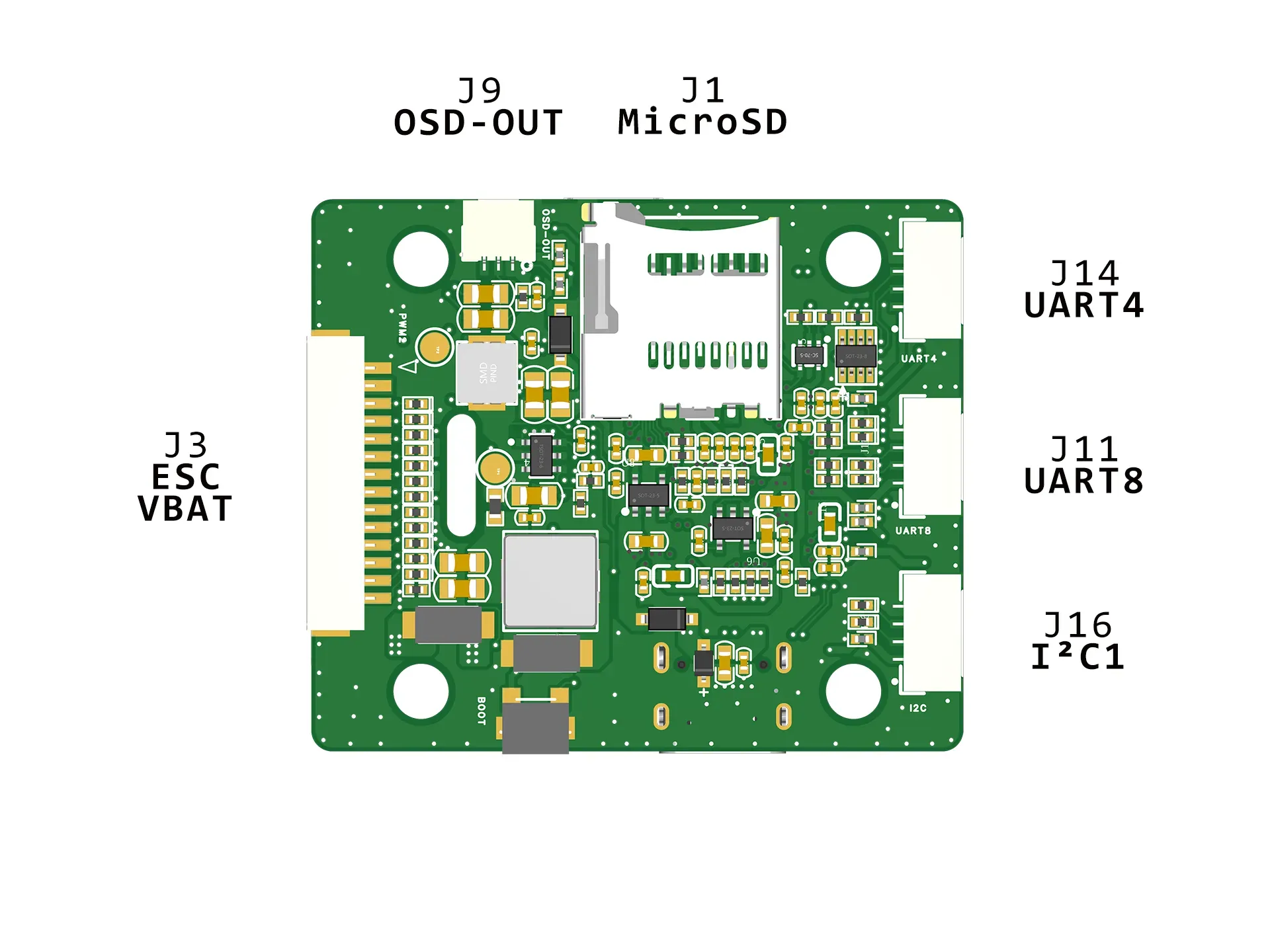
KT-FMU-F1带有丰富的接口,以下是连接器位置示意图:
引脚定义
电调和供电输入 - J2
| 引脚号 | 功能 |
|---|---|
| 1 | 电流检测 |
| 2 | UART7_TX |
| 3 | PWM6 |
| 4 | PWM5 |
| 5 | PWM4 |
| 6 | PWM3 |
| 7 | PWM2 |
| 8 | PWM1 |
| 9 | VBAT_IN |
| 10 | GND |
电调和供电输入 - J3
| 引脚号 | 功能 |
|---|---|
| 1 | GND |
| 2 | VBAT_IN |
| 3 | PWM1 |
| 4 | PWM2 |
| 5 | PWM3 |
| 6 | PWM4 |
| 7 | PWM5 |
| 8 | PWM6 |
| 9 | PWM7 |
| 10 | PWM8 |
| 11 | PWM9 |
| 12 | PWM10 |
| 13 | UART7_TX |
| 14 | 电流检测 |
注意:J2和J3同时只能用一个
UART - J5, J11, J14, J15
| 引脚号 | 功能 |
|---|---|
| 1 | 5V 输出 |
| 2 | TX |
| 3 | RX |
| 4 | GND |
I2C - J16
| 引脚号 | 功能 |
|---|---|
| 1 | 5V 输出 |
| 2 | I2C1_SDA |
| 3 | I2C1_SCL |
| 4 | GND |
SWD - J17
| 引脚号 | 功能 |
|---|---|
| 1 | 3V3 |
| 2 | SWCLK |
| 3 | SWDIO |
| 4 | GND |
CAN - J6
| 引脚号 | 功能 |
|---|---|
| 1 | 5V 输出 |
| 2 | CAN_H |
| 3 | CAN_L |
| 4 | GND |
字符叠加 - J9, J10
| 引脚号 | 功能 |
|---|---|
| 1 | GND |
| 2 | 视频信号 |
| 3 | 9V 输出 |
IMU 小板接口 - J12
| 引脚号 | 功能 |
|---|---|
| 1 | 5V 输出 |
| 2 | CS_BMI270 |
| 3 | SPI2_MISO |
| 4 | SPI2_MOSI |
| 5 | SPI2_SCK |
| 6 | I2C1_SCL |
| 7 | I2C1_SDA |
| 8 | CS_BMI088-陀螺仪 |
| 9 | CS_BMI088-加速度计 |
| 10 | GND |
遥控信号输入 - J4
| 引脚号 | 功能 |
|---|---|
| 1 | 5V 输出 |
| 2 | UART6_TX |
| 3 | 遥控信号输入 |
| 4 | GND |
遥控信号输出 - J7
| 引脚号 | 功能 |
|---|---|
| 1 | 3V3 |
| 2 | GND |
| 3 | 遥控信号输出 (UART6_RX) |
> 遥控接收机的信号经过一个可控的反相器(其实是异或门)输入UART6_RX,并通过J7输出
GPS, 安全开关, 蜂鸣器 - J8
| 引脚号 | 功能 |
|---|---|
| 1 | 5V 输出 |
| 2 | UART3_TX |
| 3 | UART3_RX |
| 4 | I2C1_SCL |
| 5 | I2C1_SDA |
| 6 | 安全开关 |
| 7 | 安全开关LED |
| 8 | 3V3 |
| 9 | 蜂鸣器 |
| 10 | GND |
板载资源
磁力计和气压计
KT-FMU-F1 的 IMU 小板上集成了 IST8310 磁力计,连接到MCU的I2C2接口。为了减少磁干扰,你也可以通过 GPS 连接器(J8)使用外部磁力计模块,连接到MCU的I2C1接口。
KT-FMU-F1的主板集成了 DPS310 气压计,也连接到MCU的I2C2接口。
电压检测
KT-FMU-F1 板载电池电压检测电路,电池电压通过电调和供电输入连接器(J2/J3) 输入飞控主板, 经过1/21的分压后接入PC0引脚。飞控固件需要配置电压检测参数, 才能正确读取电池电压。
此外电流检测需要依靠电调的电流采样电路,接入PC1引脚。
字符叠加
KT-FMU-F1 板载字符叠加芯片 AT7456E,连接到MCU的SPI1接口。 可以将飞控数据叠加到模拟摄像头的图像上, 通过 字符叠加连接器(J9/J10) 输出视频信号。
电源转换
KT-FMU-F1 板载2个Buck转换器,可以输出9V和5V电压给外设供电。建议每路电压的总输出电流不超过0.5A。
固件
KT-FMU-F1目前已经适配了ArduPilot,工程发布时官网已经上线了Latest版本固件:ArduPilot固件官网。可以通过SWD连接器(J17)或 DFU 模式(按住Boot按键插入USB线)刷入Bootloader,然后用 QGC 等地面站刷入主程序。
未来将会适配PX4,Betaflight和INAV。
当然,你也可以自己开发一个固件。
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









