

1.5°/hr极致零漂30¥超高性价比六轴IMU
简介
Helios IMU V1.0是一款纯6轴IMU,无磁力计依赖,配备主动温补系统,具有超强的抗冲击能力,自带线性加速度补偿,动态响应良好,静态精度高,适合某些运动剧烈的比赛(如RoboMaster)
简介:Helios IMU V1.0是一款纯6轴IMU,无磁力计依赖,配备主动温补系统,具有超强的抗冲击能力,自带线性加速度补偿,动态响应良好,静态精度高,适合某些运动剧烈的比赛(如RoboMaster)开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
由于原先采用日本DTK的进口MEMS传感器ICM45686价格暴涨800%,本项目的低成本初衷已无法达到,作者后续将不再维护Helios IMU,目前正在规划一款纯国产方案 "Epsilon IMU V2.0",精度理论上和该款IMU相差无几,但性价比只会更高,会添加更多功能提高二次开发的可玩性,同时计划择机开源固件源码,感谢大家的关注和支持,敬请期待后续更新!!!
新开源链接:https://oshwhub.com/felix-liao/epsilon-imu-v2_0
项目简介
自研IMU惯性导航模块,低成本替代市面成品,超高性价比——BOM小于30¥。
项目功能
通过串口为上位机提供IMU模块的实时姿态信息,数据包协议兼容成品IMU模组。提供三轴加速度传感器和陀螺仪融合原始值、欧拉角、四元数等。
项目参数
* 传感器采用BMI088+ICM45686双六轴MEMS硬件方案,兼顾动态响应和静态零偏稳定;
* 主控MCU采用国民技术N32G4FRKE芯片,低成本225DMIPS@180MHz极致算力,512KB大容量零等待Flash和144KB全速SRAM,全速解算和通信时仅占用10%左右的算力、6%左右的Flash和3%左右的SRAM,以及各种丰富的外设,可以轻松满足各种自定义拓展需求或者二次开发;
* BMI088: 高性能的工业级六轴MEMS,以稳定可靠响应快著称。它具有较高的加速度计量程,抗冲击能力强,常用于对成本敏感且需要长期稳定运行的领域,如机器人、工业设备和高端无人机;
* ICM45686: 采用先进BalancedGyro™技术的超低噪声、高精度六轴IMU。它以其卓越的振动抑制、极低的功耗和内置运动处理引擎为特点,主要面向追求极致性能的先进导航系统;
* 双MEMS数据融合算法,高达3.2kHz的原始数据采样率,以及±32G@ 70μg/√Hz & 4000dps@ 3.8mdps/√Hz的融合量程和零偏稳定度。
* 航天级MEKF姿态解算算法,稳定解算,高效运行,即使承受远超量程的剧烈撞击依然能快速收敛,高达1kHz的解算和串口包发送频率;
* 经过算法优化后Yaw轴零偏稳定性在不影响测量精度和系统响应的前提下,只需通过上位机经过2-3次的250msMEMS零偏校准后,即可稳定达到1.5°/h以内(目前已有复刻者独立复现该精度),已经到达了某些售价400+¥的成品IMU的1.8°/h技术指标;
* 同时经过优化的最新算法,还极大程度上降低了线性加速度对测量的干扰,沿轴向的线性加速度在对应轴欧拉角的解算干扰小于±0.5°;
* 板载独立的MEMS温度补偿系统,时刻确保MEMS工作在最佳温度;
* 首次固件刷入后自动校准传感器零偏,自动存储校准值至Flash;
* 完成上位机手动校准后掉电自动保存,无需每次上电频繁校准;
* MCU与MEMS完全独立供电,同时两颗MEMS拥有独立的一分二LDO复用器由MCU控制,电源和信号组件完全分离的Layout设计,同时有预留屏蔽罩设计;
* 三个LED指示灯分别提示电源、预热和运行状态。
* 上位机固件升级支持的BootLoader和一些常用的IMU配置串口指令(包括MEMS零偏校准)。
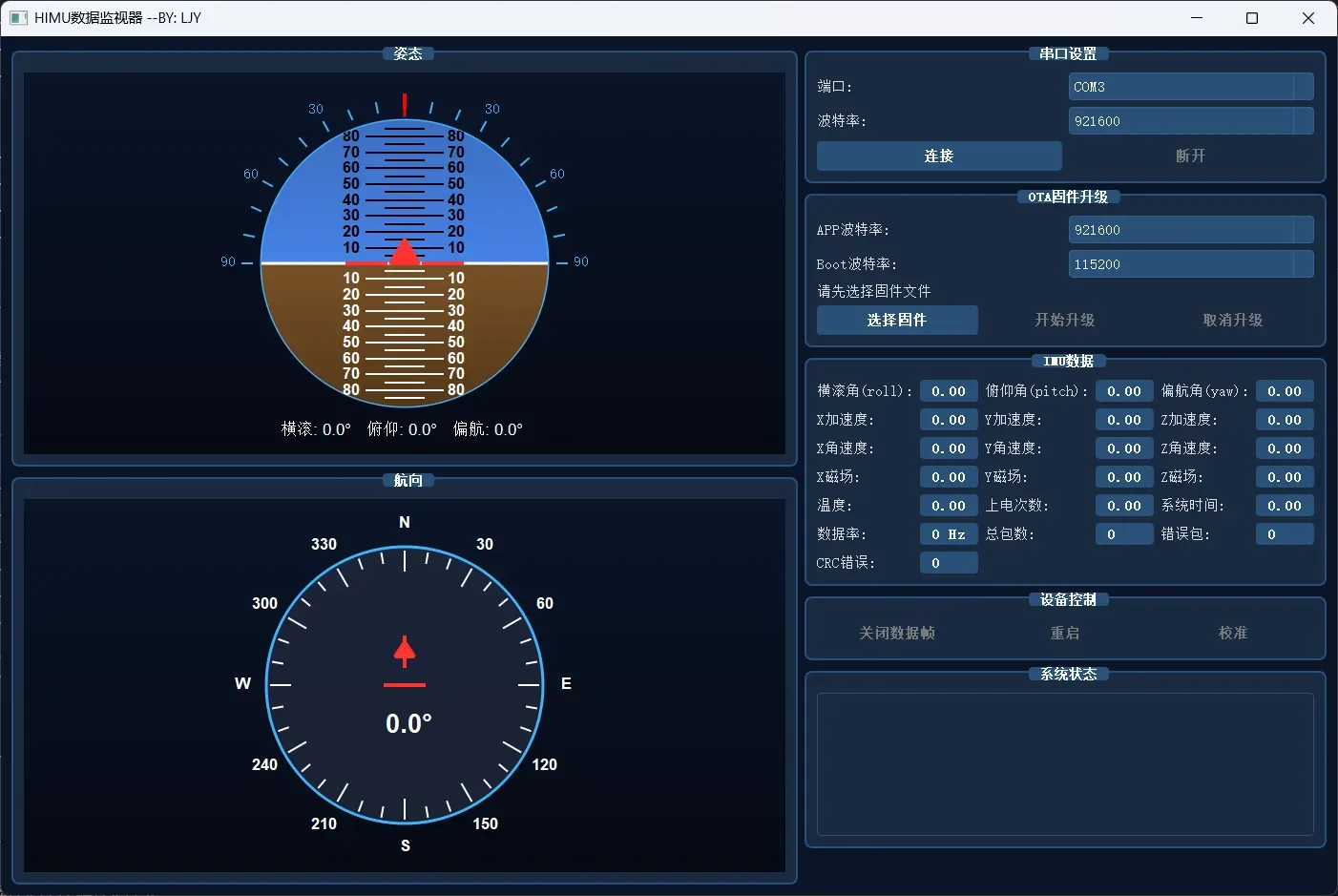
稳定固件&上位机软件
https://gitee.com/ljy-felix/himu020
注意:旧版ARMCC固件已经停止维护,现在仅需要烧录一次HEX格式的BootLoader然后直接通过上位机即可更新BIN格式固件
注意事项
* 焊接时请务必将热风枪和电烙铁温度调至300℃及以下,否则可能损坏MEMS!!!
* 需要串口数据包结构请直接通过邮箱联系git分支创建者
* 目前没有添加电源防反接设计,通电前请务必检查线序
* 机械安装M3孔位17*31,"CTR"点为准确的机械中心,两颗MEMS严格按中心轴对称
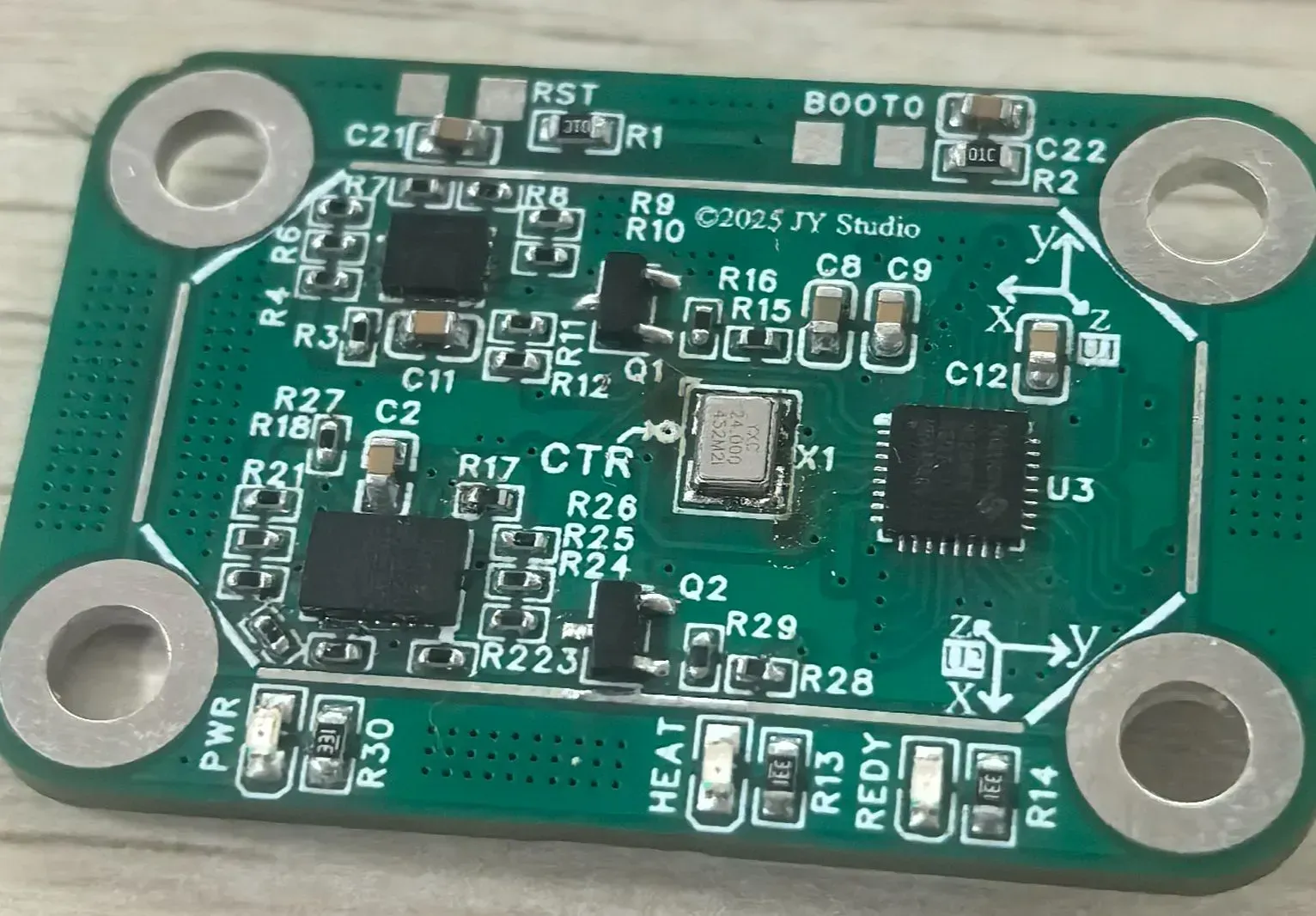
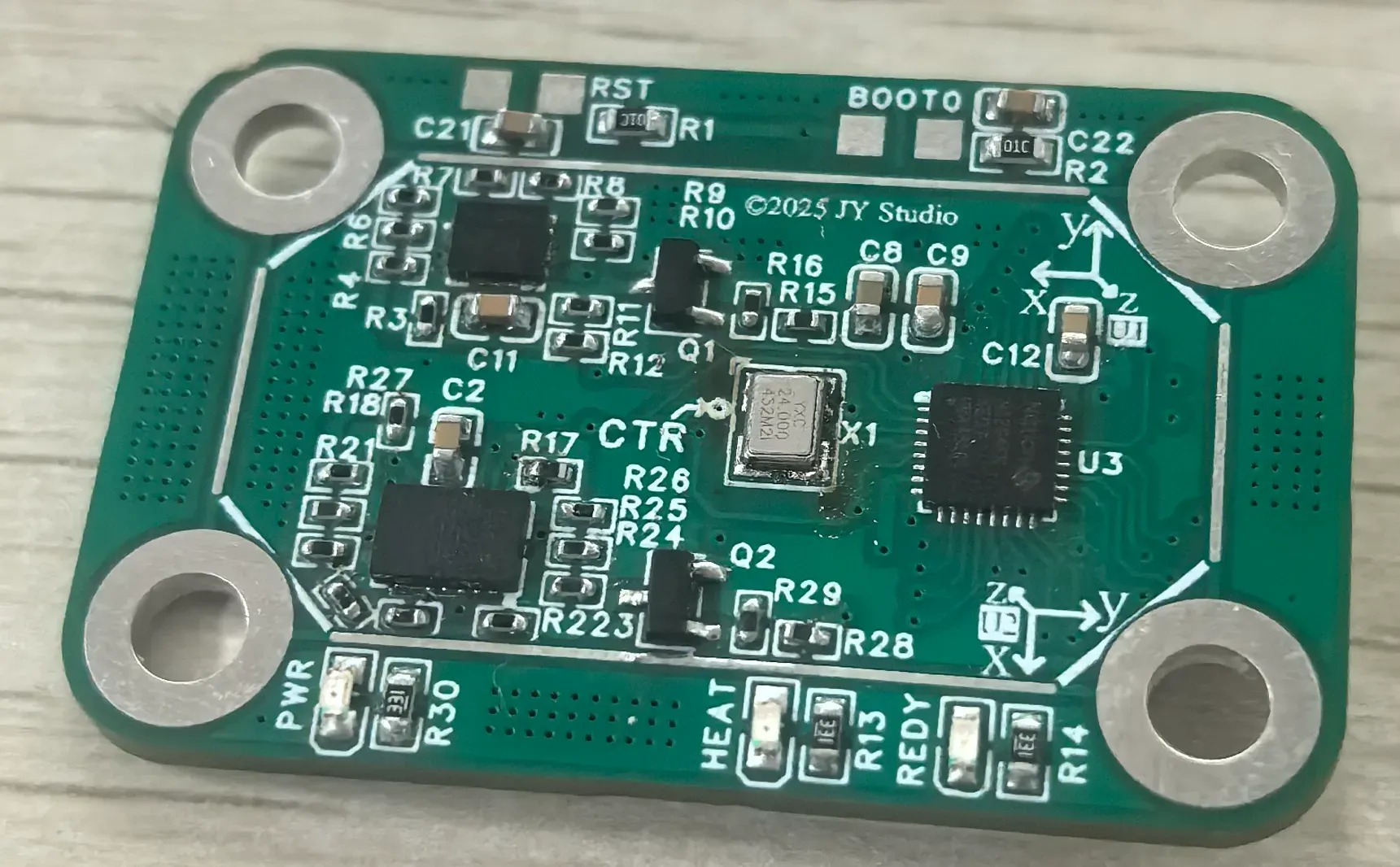
实物图
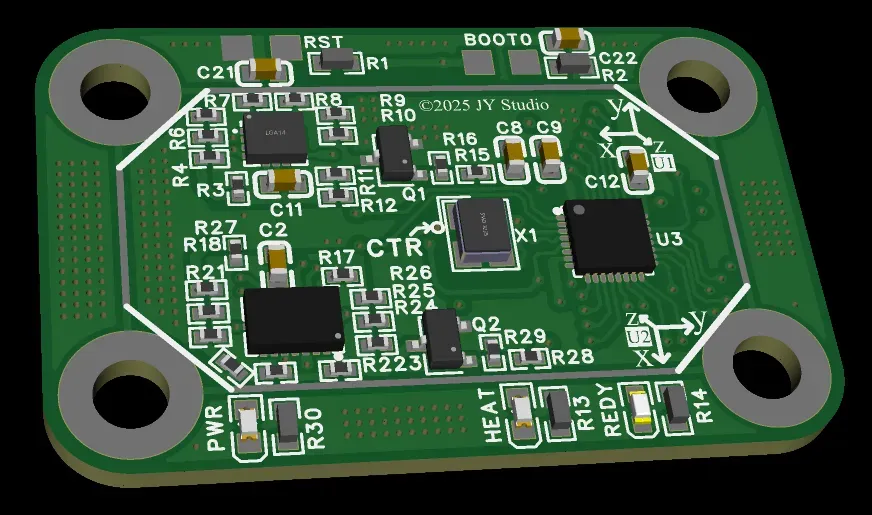
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









