


【立创开发板】核山派
工程标签
ESP系列
简介
搭载高性能ESP32-P4的核心通信板!丰富外设接口,低功耗,MIPI-DSI、MIPI-CSI,HIGH-USB、FULL-USB、UART-USB,UART,SPI,I2C,CAN,RS485。
简介:搭载高性能ESP32-P4的核心通信板!丰富外设接口,低功耗,MIPI-DSI、MIPI-CSI,HIGH-USB、FULL-USB、UART-USB,UART,SPI,I2C,CAN,RS485。开源协议
:GPL 3.0
描述
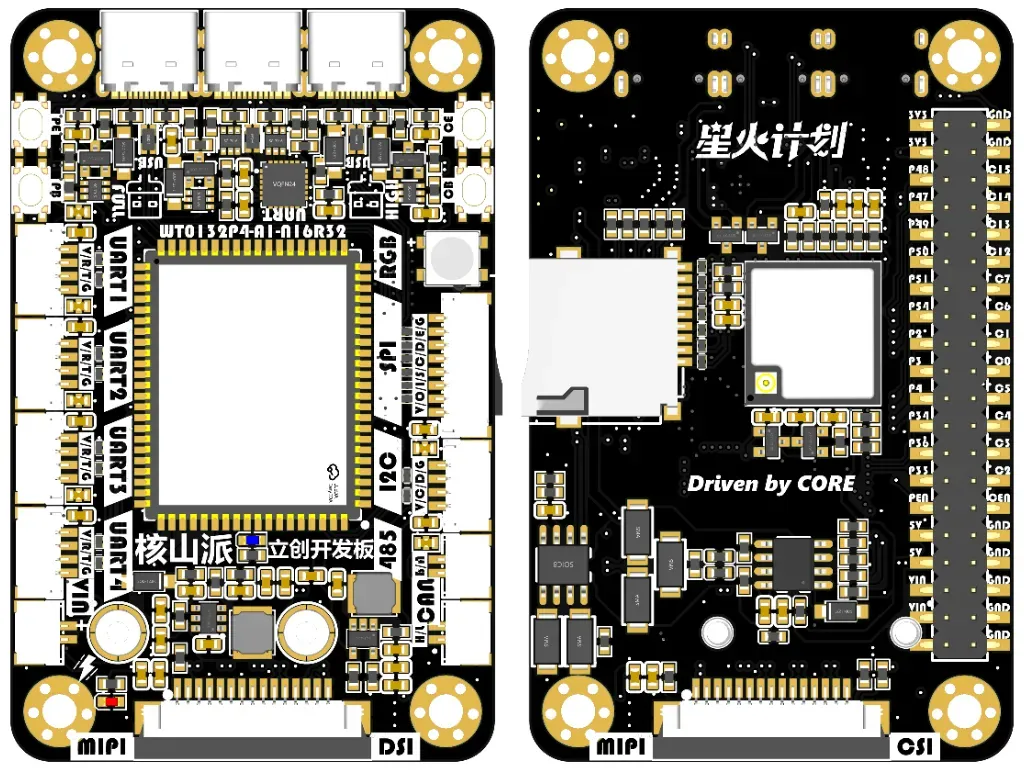
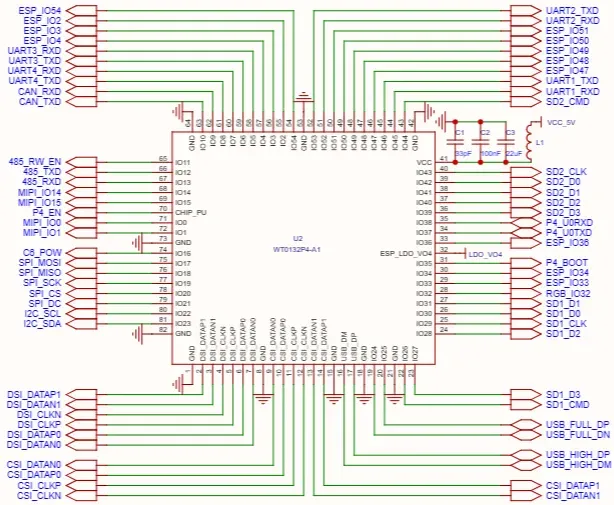
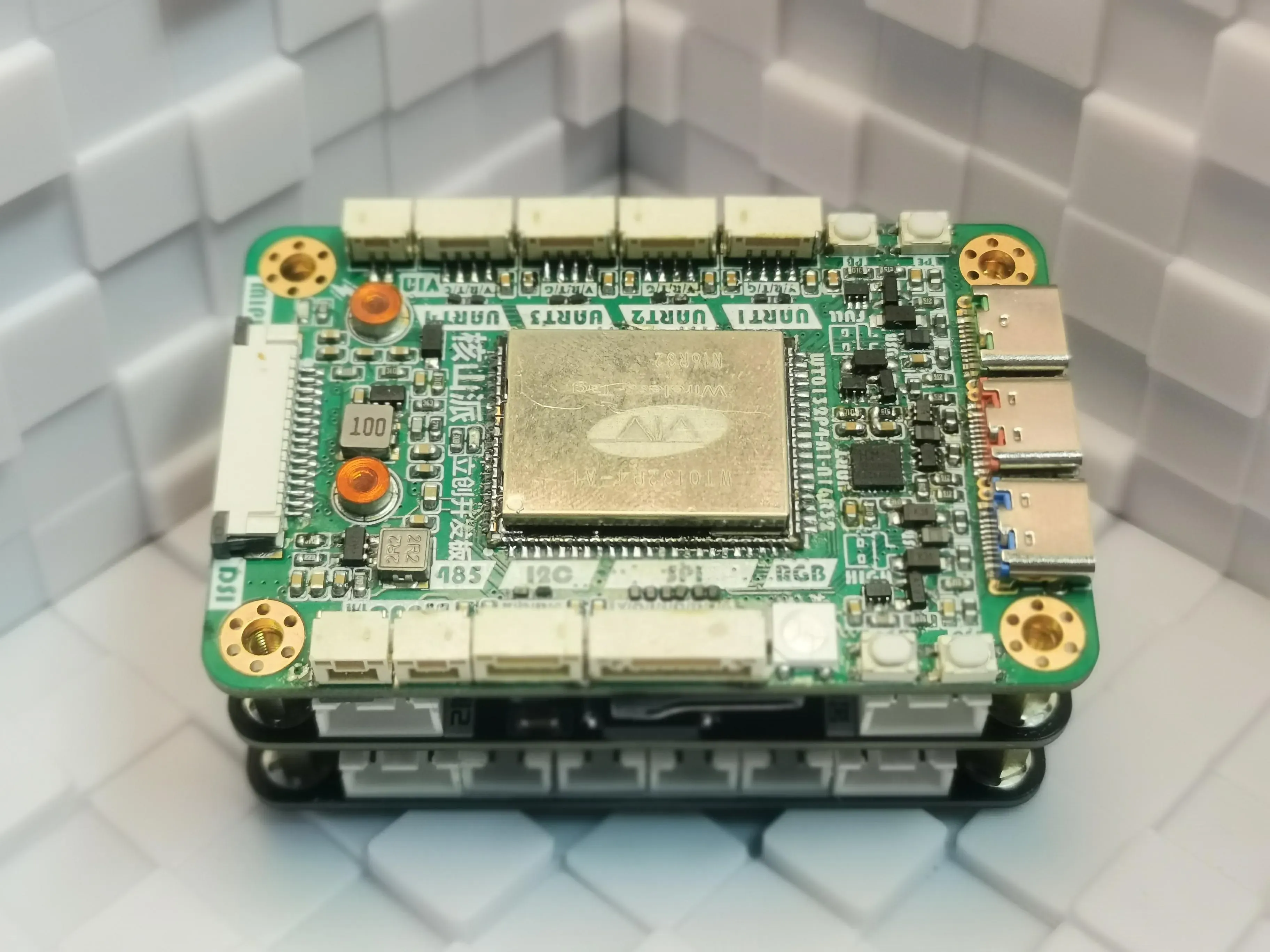
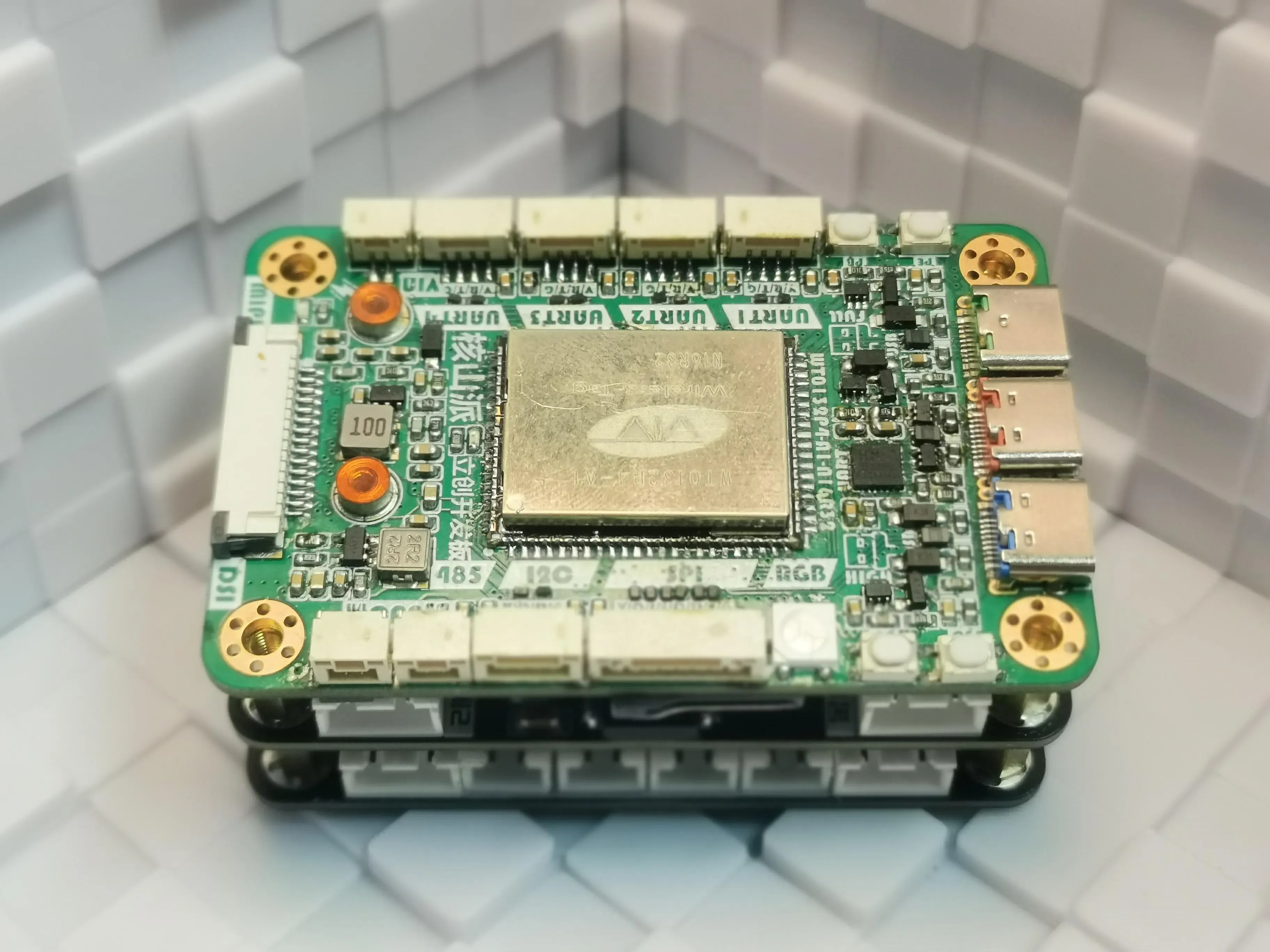
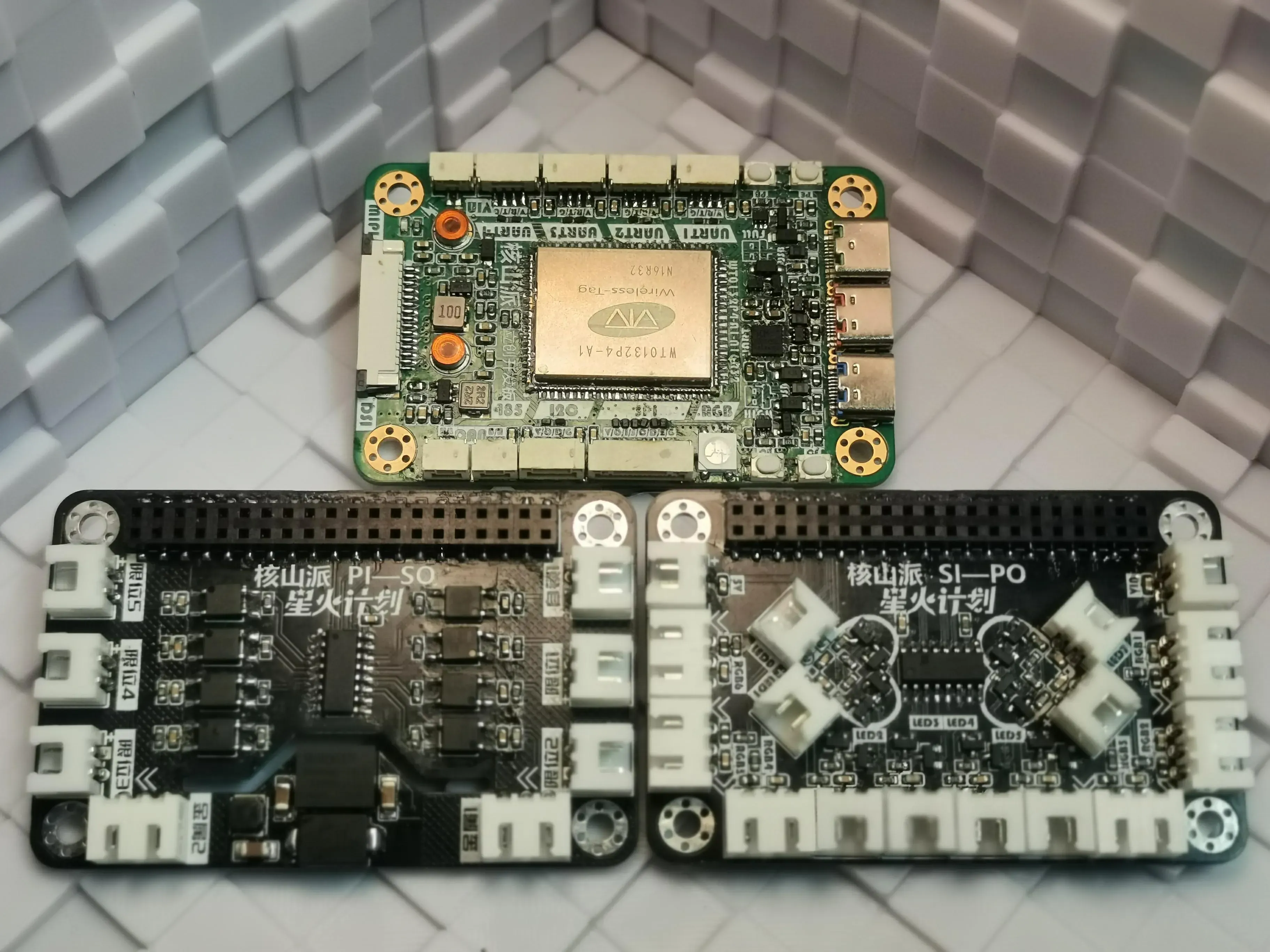
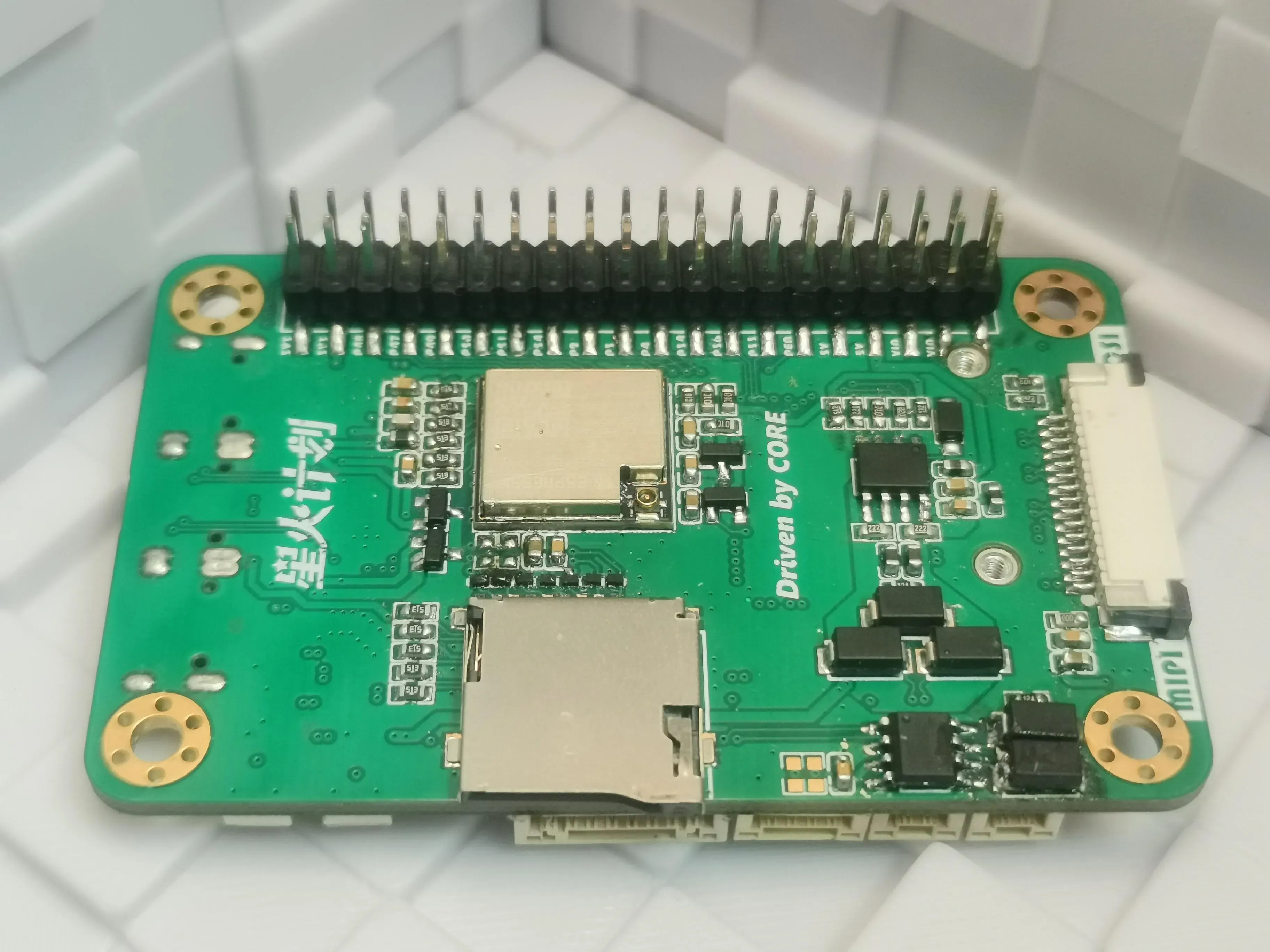
本项目使用 WT0132P4-A1 + ESP32C6-MINI-1U 模组,结合 UART、I2C、SPI、MIPI、USB、CAN、RS485 等丰富外设接口实现核心通信板功能。 搭载高性能 ESP32P4 的 WT0132P4 模组集成了 32MB PSRAM 和 16MB FLASH,为程序提供较大的存储空间。
核山派的 “核” 代表核心的意思,即 核心通信板 。
固件功能
✅ 支持 爱山派 激山派 衡山派 庐山派 四路UART通信控制。
✅ 支持 势山派 通信控制。
✅ 支持步进电机的 CAN 芯片串级通信控制。
✅ 支持板载 ESP32P4 和 ESP32C6 高速通信控制。
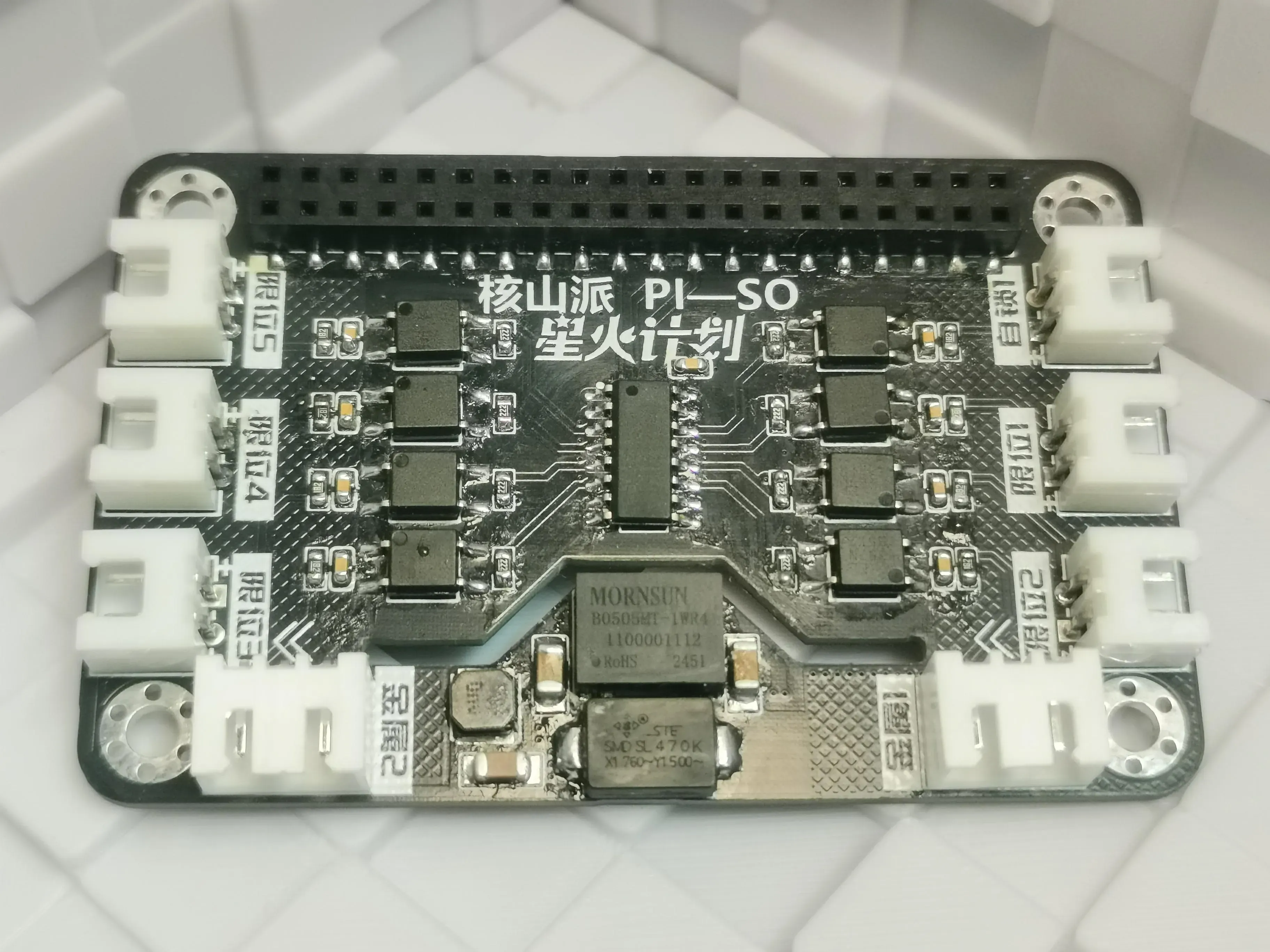
✅ 支持核山派 PISO 拓展板上下合体联接,控制一路自锁开关、五路限位开关、两路金属接近传感器的输入。
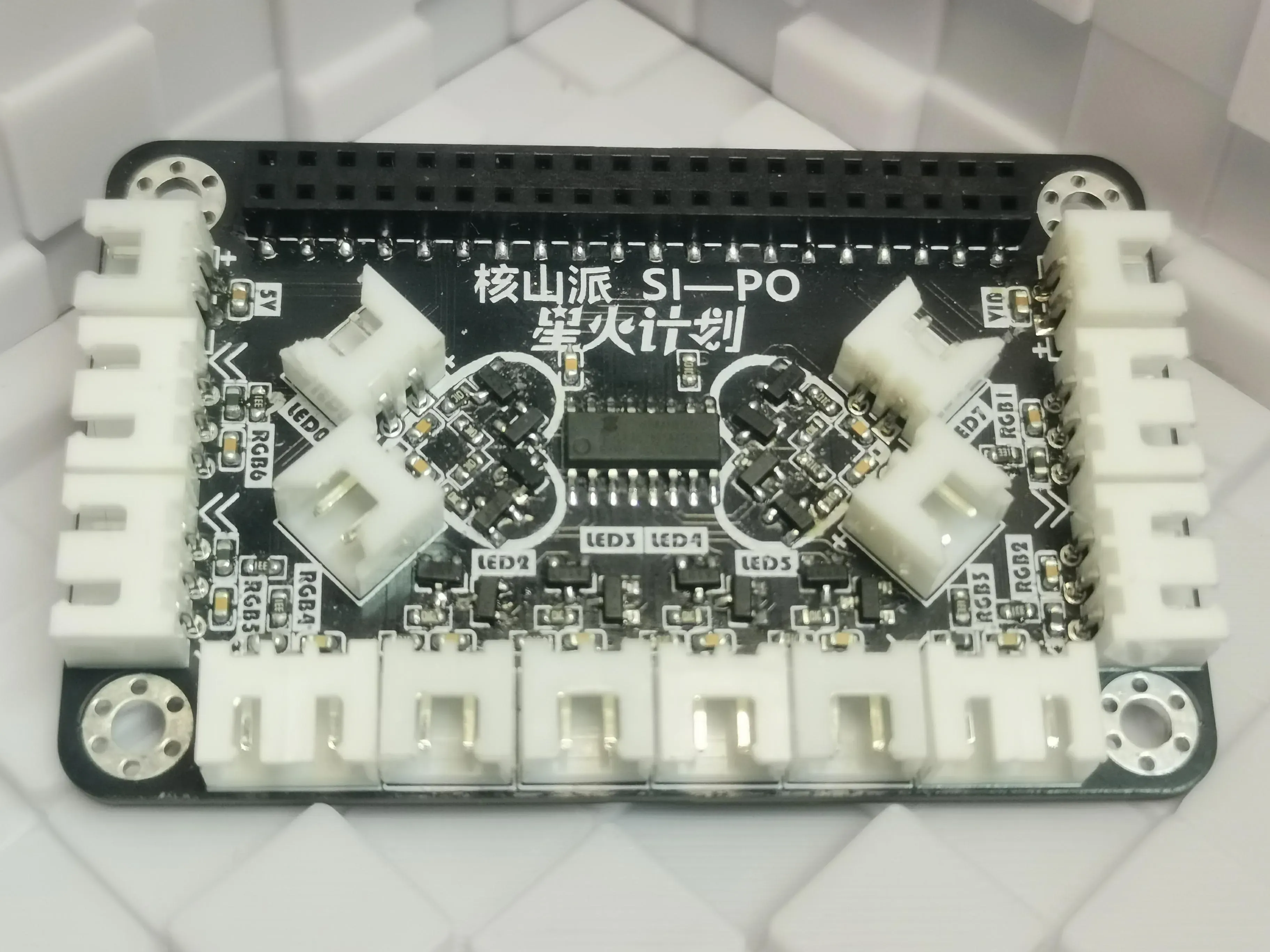
✅ 支持核山派 SIPO 拓展板上下合体联接,控制八路灯珠、六路RGB灯带的输出。
项目参数
✅ ESP32P4 系列主控,55个 GPIO,丰富的外设。
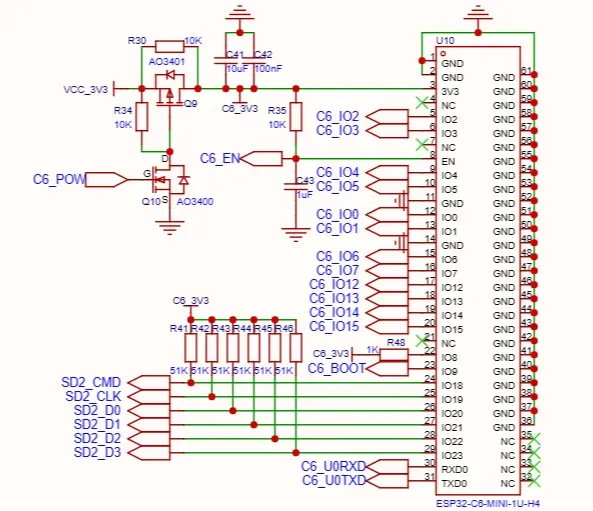
✅ ESP32C6 系列主控,内置 WiFi+Bluetooth 功能。
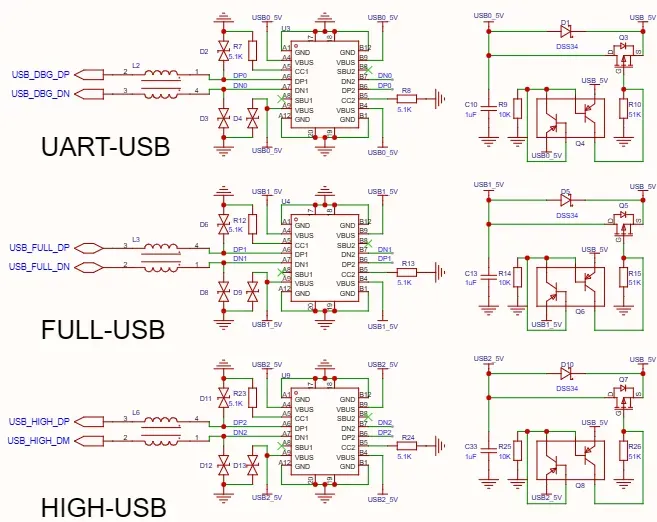
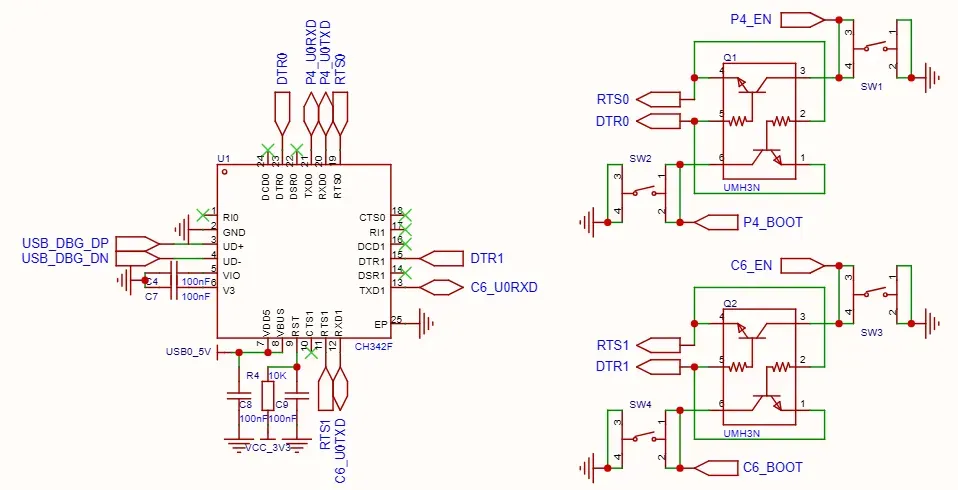
✅ 采用 USB 转双 UART,分别为 ESP32P4 和 ES32C6 烧录和调试。
✅ 采用 CAN 通信芯片,用于步进电机的 CAN 芯片串级通信。
✅ 采用 RS485 通信芯片,用于备用通信。
✅ 采用拓展排针接口,与对应开发板上下合体联接,形成一体化模块。
✅ 采用连接器引出外设接口,根据丝印标识选择。
✅ 采用电山派供电,用 M2 螺丝连接供电。
✅ 采用 USB 2.0 接口,引出 UART-USB、FULL-USB、HIGH-USB。
✅ 采用标准MIPI接口,引出 MIPI-CSI、MIPI-DSI。
✅ 采用 5050 封装,用于人机交互。
✅ 采用四线模式,高速读取内容。
主控选用 ESP32P4+ESP32C6系列 模组,集成 WiFi+Bluetooth 功能,提供 55+22 个 GPIO 接口。 模组间通过 SD 接口实现高速通信,ESP32P4 通过(C6_POW)GPIO 控制 ESP32C6 的供电开关。
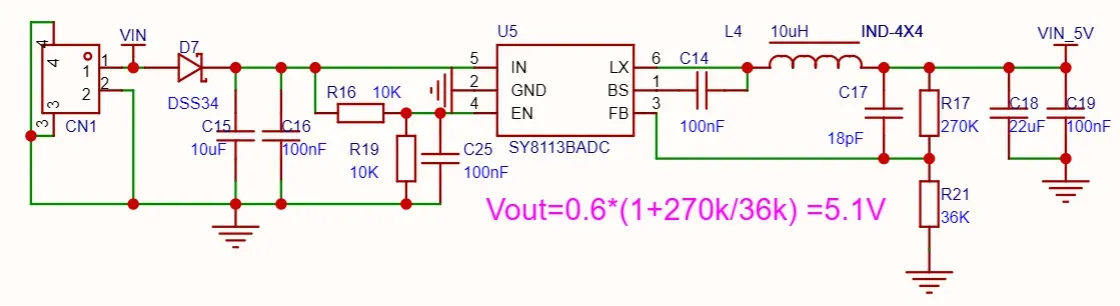
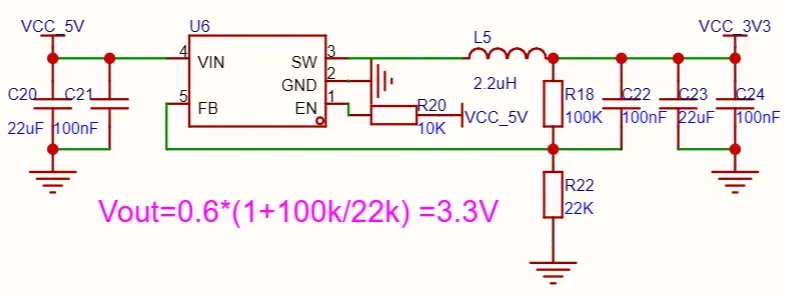
电源供电通过 M2贴片圆螺母 或 GH125连接器 输入,采用M2贴片圆螺母时,可与 电山派 上下合体联接。 通过最大能够提供 3A 电流的 DCDC 降压至 5V 为 ESP32P4 MCU 供电和外拓排针接口供电。通过最大能够提供 2A 电流的 DCDC 降压至 3.3V 为其他板载芯片供电和外拓排针接口供电。
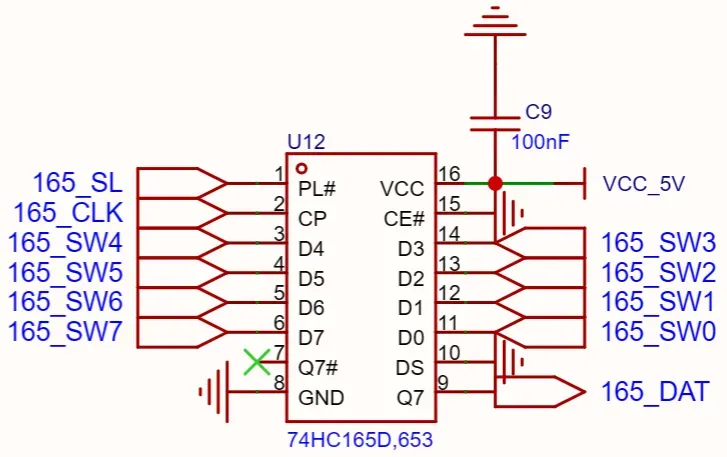
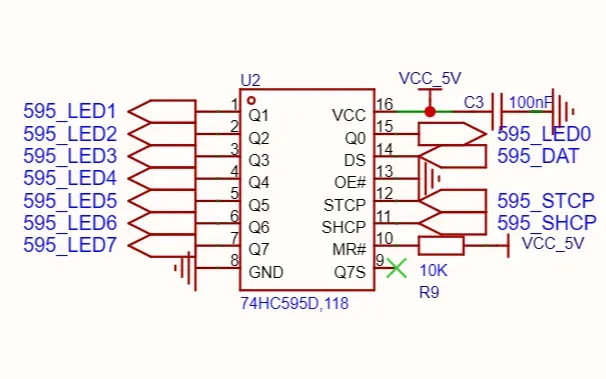
并入串出、串入并出系统分别使用 74HC165D 、74HC595D 移位寄存器进行输入输出处理,通过核山派 40PIN 排针联接拓展板,每个拓展板仅需要 3 个 GPIO 就可以实现八路并行输入或输出(多个芯片级联可实现 8×n 个并行输入输出)。
三路 USB 同时供电时电源自动选择,USB 电源与外部电源同时输入时自动选择。由于使用两个 MCU ,自动下载电路可同时为两个 MCU 烧录固件。
软件开发
本项目部分程序文件解释说明。
- app_165: 74HC165D 驱动程序,用于拓展板
- app_595: 74HC595D 驱动程序,用于拓展板
- app_can: SN65HVD232 驱动程序,用于 CAN 通信
- app_rgb: RGB 灯驱动程序,用于人机交互
- app_c6: ESP32C6MINI 驱动程序,用于交互通信
- app_i2c_ssp: 势山派通信程序,用于手势识别
- app_uart_asp: 爱山派通信程序,用于 AI 交互
- app_uart_jsp: 激山派通信程序,用于激光投影
- app_uart_hsp: 衡山派通信程序,用于串口屏交互
- app_uart_lsp: 庐山派通信程序,用于视觉交互
esp_err_t hc165_init(const hc165_config_t *config); //初始化74HC165
esp_err_t hc165_read_byte(uint8_t *data); //读取74HC165的8位数据
esp_err_t hc165_read_bit(uint8_t bit_position, bool *state); //读取单个位的状态
esp_err_t hc165_read_multiple(uint8_t *data, uint8_t num_chips); //读取多个74HC165级联的数据
esp_err_t hc165_set_clock_enable(bool enable); //设置时钟使能引脚状态
void data_change_detector_init(data_change_detector_t *detector, bool show_on_change); //初始化数据变化检测器
bool data_change_detector_process(data_change_detector_t *detector, uint8_t current_value); //检测数据是否变化并处理
esp_err_t hc595_init(const hc595_config_t *config); //初始化74HC595
esp_err_t hc595_write_byte(uint8_t data); //向74HC595写入8位数据
esp_err_t hc595_write_bit(uint8_t bit_position, bool state); //设置74HC595的单个位
esp_err_t hc595_write_multiple(const uint8_t *data, uint8_t num_chips); //向多个级联的74HC595写入数据
esp_err_t hc595_clear(void); //清除74HC595输出(如果连接了清除引脚)
esp_err_t hc595_set_output_enable(bool enable); //设置输出使能状态
esp_err_t hc595_test_shift_pattern(uint32_t delay_ms, uint32_t cycles); //移位寄存器测试模式(流水灯效果)
esp_err_t hc595_test_binary_count(uint32_t delay_ms, uint8_t count_to, uint32_t cycles); //二进制计数模式
esp_err_t can_init(void); //初始化CAN
esp_err_t can_deinit(void); //反初始化CAN
esp_err_t can_send_motor_command(uint8_t motor_index, uint8_t command, uint8_t *data, uint8_t len); //CAN发送电机命令
esp_err_t can_enable_motor(uint8_t motor_index); //CAN启用电机
esp_err_t can_disable_motor(uint8_t motor_index); //CAN禁用电机
esp_err_t can_calibrate_motor(uint8_t motor_index); //CAN校准电机
esp_err_t can_set_origin(uint8_t motor_index); //CAN设置电机零点
esp_err_t can_position_control(uint8_t motor_index, int32_t position, uint8_t speed, bool use_reducer); //CAN控制电机位置
esp_err_t can_query_position(uint8_t motor_index); //CAN查询电机位置
esp_err_t can_collision_detect(uint8_t motor_index); //CAN电机碰撞检测
esp_err_t can_reset_motor_position(uint8_t motor_index); //CAN复位电机
void can_check_status(void); //CAN打印状态
void can_start_receive_task(void); //CAN开始接收任务
void can_stop_receive_task(void); //CAN停止接收任务
安装结构
项目采用 40PIN 拓展排针叠层设计,拓展无限可能。
组装说明:拓展板可交换上下顺序,板框四个 M3 螺丝孔加入铜柱可增强稳定性。

注意事项
设计图
BOM
3D模型
| 序号 | 文件名称 | 下载次数 |
|---|---|---|
暂无数据 | ||
附件
| 序号 | 文件名称 | 下载次数 |
|---|---|---|
暂无数据 | ||
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









