

致动 终极传奇 摇杆模块
简介
致动终极传奇摇杆模块 使用PS5引脚定义
简介:致动终极传奇摇杆模块 使用PS5引脚定义开源协议
:CC BY-NC-SA 4.0
(未经作者授权,禁止转载)描述
项目简介
DIY致动终极传奇摇杆模组,包括外壳和PCB(已验证)
因部分尺寸来源于Meki设计的PCBA
故本项目使用CC BY-NC-SA 4.0协议,转载请注明出处并保持相同协议发布
您不得将本项目用于商业用途
项目参数
- JLC光固化打印,材料9600,侧重结构和强度,不打磨
- PCB板厚1mm 推荐沉金
- 使用螺丝为CA M1.4*5头径2.6 螺丝刀采用PH000
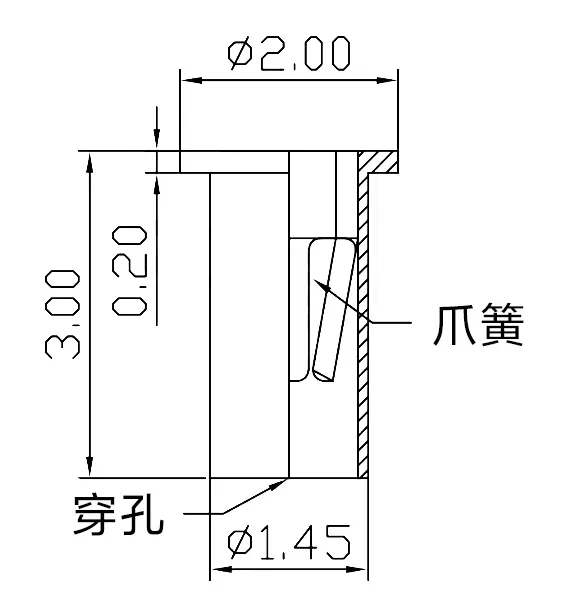
- 热插拔版本铜座尺寸:
- 1号铜座 2.0*3.0mm 外径1.45 台阶厚度0.2mm
- 2号铜座 1.45*3.5mm 外径1.0 台阶厚度0.4mm
- 摇杆使用DS5引脚定义,无需翻转磁铁/反转
- 同样适配jh16同封装的半高摇杆
原理解析(硬件说明)
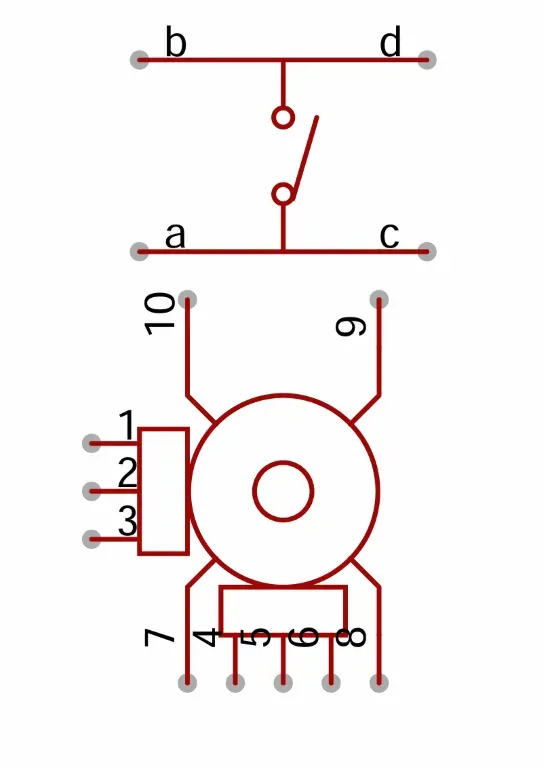
记1 2 3引脚和 4 5 6引脚分别为A B
则 ds5 ds4 xbox switch pro 的引脚定义分别为
| 手柄 | A组引脚定义 | B组引脚定义 |
|---|---|---|
| ds5 | GND-OUT-VCC | GND-OUT-VCC |
| ds4 | VCC-OUT-GND | GND-OUT-VCC |
| xbox | GND-OUT-VCC | VCC-OUT-GND |
| switch pro | GND-OUT-VCC | GND-OUT-VCC |
| ZD | VCC-OUT-GND | VCC-OUT-GND |
注:表格数据通过网络各个手柄主板拆解图猜测得出
由表可得,将PS5摇杆旋转180度即可适配ZD手柄
下单及所需材料说明
- 根据所需要的功能选择对应PCB下单(比如需要热插拔就下单热插拔的)
- 购买ds5替换摇杆
- 如使用像js13pro这种的摇杆,下单本项目的3d打印外壳文件A、B文件
- 在淘宝/电子城购买 CA M1.4*5头径2.6 平头螺丝 4个
- 电烙铁、焊锡丝等常规焊接工具
- ph000螺丝刀
- (可选)砂纸1000目(用于打磨)
- (可选)超声波刀
注意事项
- PCB注意厚度
- 焊接技术不好的就用中温/低温焊锡
- 3D打印件有些地方会有毛刺,要自己处理
- 摇杆模块太紧就打磨下,不要大力出奇迹😀
- 目前外壳只公开step文件,如有建议,请联系我
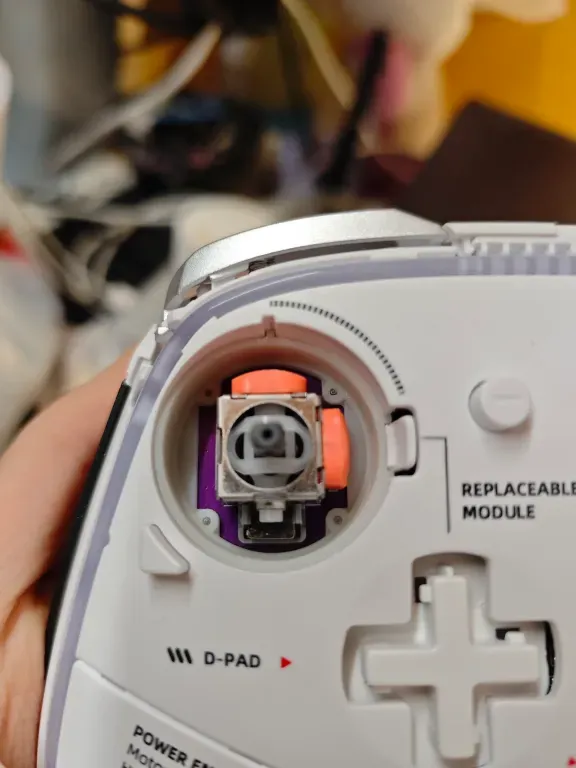
- 注意摇杆方向,错误安装可能导致手柄烧坏,正确方向是微动朝下
- 铜座前的1号2号仅方便文章中引用区分,并非标准命名
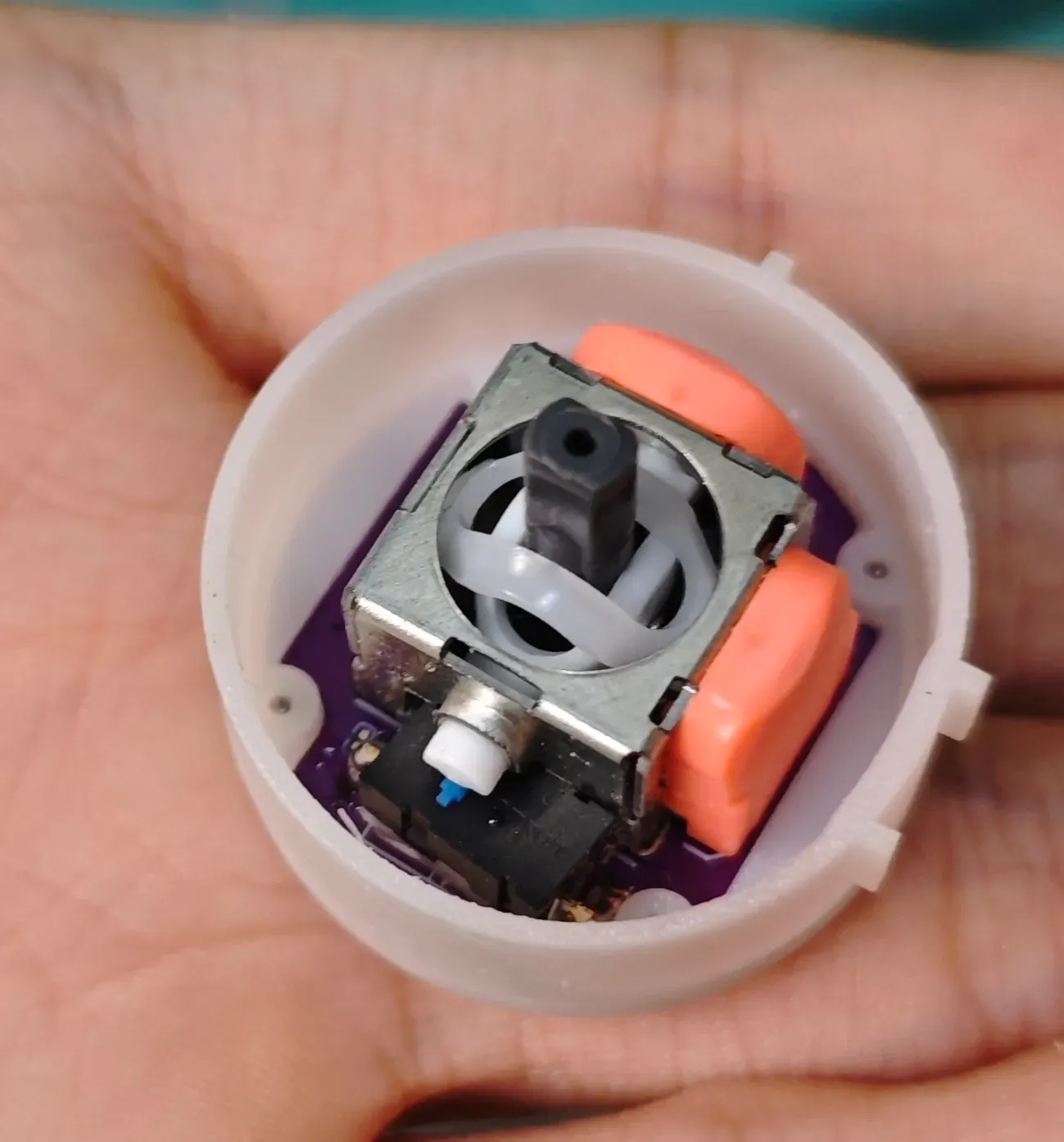
组装流程
DS13MAX/JS13PRO/ALPS rkjxv1224
- 准备好
PCB、下壳体-全高摇杆、上壳体-全高摇杆外壳及螺丝等材料。 - 将摇杆模块焊接到
PCB上面(有丝印提示)。 - 将
上壳体-全高摇杆外壳盖在下壳体-全高摇杆外壳上,并用螺丝固定。 - 尝试放入手柄测试。
- 如放入困难/异常松,可用砂纸打磨外壳/贴胶带。
- 拆出摇杆模块,拧下螺丝。
- 将焊接好的
PCB放入外壳下壳体-全高摇杆内,使引脚不被加强筋阻挡。 - 盖上外壳
上壳体-全高摇杆,并用螺丝固定。

|
|
DS13MAX/JS13PRO/ALPS rkjxv1224 下压微动版本
- 准备好
PCB、下壳体-全高摇杆、上壳体-全高摇杆、下压微动开关垫及螺丝等材料。 - 使用超声波刀或其他工具将
PCB上的轻触开关和部分塑料壳体切除
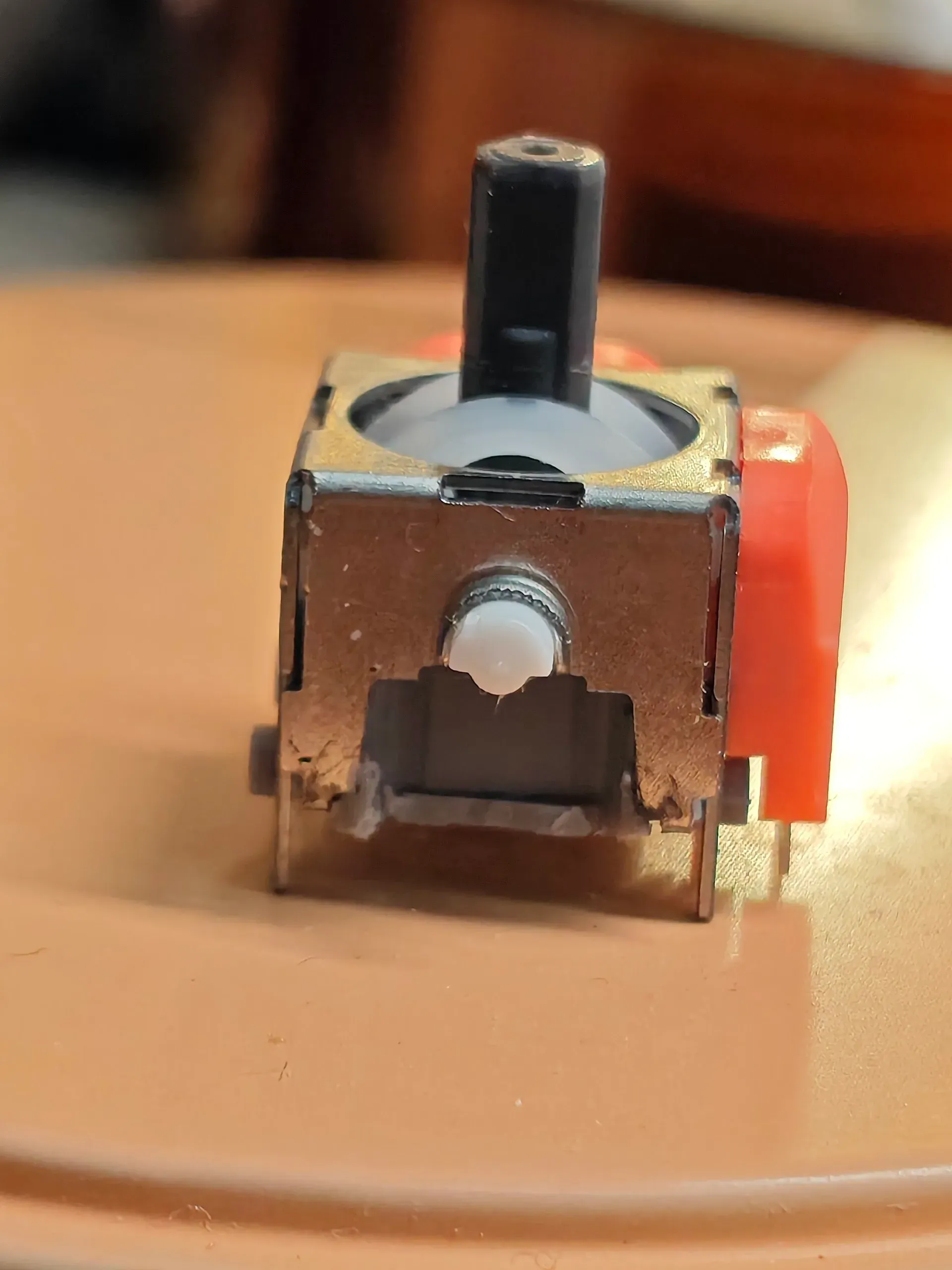
- 将下压微动开关垫放在
PCB上,使用3M双面胶(55236)或其它胶水固定 - (直插两脚微动)将两脚微动开关引脚穿过
下压微动开关垫上的孔位,并焊接到PCB上。
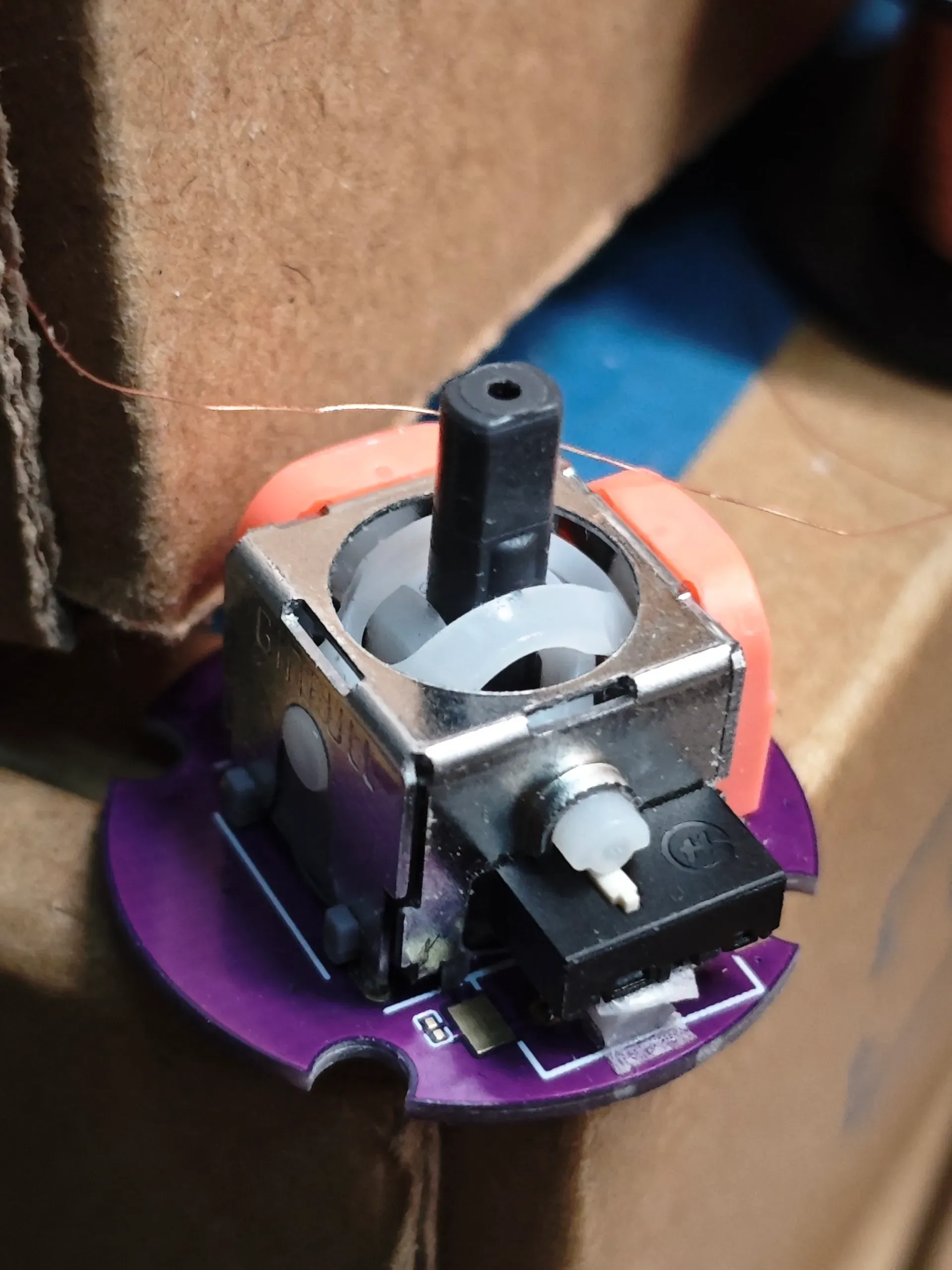
- (贴片两脚微动)将贴片两脚微动开关的引脚向下弯曲,使其尽可能贴近PCB焊盘。将微动开关放置在
下压微动开关垫上的孔位,并焊接到PCB上。 - 放置摇杆模块到
PCB上面。 - 调整微动开关位置,使其能被摇杆模块压下且没有虚位。
- 使用双面胶将微动开关固定在
下压微动开关垫上。 - 焊接摇杆模块到
PCB上面(有丝印提示)。 - 焊接微动开关到
PCB上面(有丝印提示)。 - 将PCB放入外壳
下壳体-全高摇杆内,使引脚不被加强筋阻挡。 - 盖上外壳
上壳体-全高摇杆,并用螺丝固定。
- 打磨外壳/贴胶带。
- 放入手柄测试并校准。
谷粒可调阻尼tmr/控银JT13
- 准备好
PCB、下壳体-全高摇杆、上壳体-全高摇杆外壳及螺丝等材料。 PCB放在上壳体-全高摇杆下方,从上壳体上方放入摇杆。- 焊接PCB。(焊接完
上壳体-全高摇杆应该是取不出的状态) - 将
下壳体-全高摇杆对齐PCB,拧上螺丝。 - 打磨外壳/贴胶带。
- 放入手柄测试并校准。
JH16/RJ18/JS16/JS16PRO
- 准备好
PCB、下壳体-半高摇杆、上壳体-半高摇杆外壳及螺丝等材料。 - 将摇杆模块焊接到
PCB上面(有丝印提示)。 - 将
上壳体-半高摇杆外壳盖在下壳体-半高摇杆外壳上,并用螺丝固定。 - 尝试放入手柄测试。
- 如放入困难/异常松,可用砂纸打磨外壳/贴胶带。
- 拆出摇杆模块,拧下螺丝。
- 将焊接好的
PCB放入外壳下壳体-半高摇杆内,使引脚不被加强筋阻挡。 - 盖上外壳
上壳体-半高摇杆,并用螺丝固定。 - 放入手柄测试并校准。
DS13MAX/JS13PRO/ALPS rkjxv1224 热插拔
铜座尺寸说明:
1号铜座 2.0*3.0mm 外径1.45 台阶厚度0.2mm
2号铜座 1.45*3.5mm 外径1.0 台阶厚度0.4mm
以1号铜座为例:
- 准备好
PCB、下壳体-全高摇杆、上壳体-全高摇杆外壳及螺丝等材料。 - 使用1.5mm pcb钻头在
PCB轻触开关的4个引脚处触点对面层钻孔 深度0.4mm。 - 使用2.0mm pcb钻头在
PCB剩余的10个引脚处触点对面层钻孔 深度0.2mm。 - 将2号铜座焊接到
PCB轻触开关的4个引脚处。 - 将1号铜座焊接到
PCB剩余的10个引脚处。 - 插入摇杆测试引脚是否能顺利插入铜座。
- 将2号铜座前的多余部分剪掉,保持与引脚平齐。
- 将
上壳体-全高摇杆外壳盖在下壳体-全高摇杆外壳上,并用螺丝固定。 - 尝试放入手柄测试。
- 如放入困难/异常松,可用砂纸打磨外壳/贴胶带。
- 拆出摇杆模块,拧下螺丝。
- 将焊接好的
PCB放入外壳下壳体-全高摇杆内,使引脚不被加强筋阻挡。 - 盖上外壳
上壳体-全高摇杆,并用螺丝固定。 - 放入手柄测试并校准。
文件列表
- PS5定义的热插拔版
- PS5定义的非热插拔版(已验证)
- JH16同封装摇杆非热插拔版(已验证)
- 上壳体-半高摇杆
- 下壳体-半高摇杆
- 上壳体-全高摇杆
- 下壳体-全高摇杆
- 微动垫子
更新计划
- 适配JH16/RJ18同封装摇杆
- 添加防呆设计
更新日志
2025-12-4
由于高度过高,无法适配 kt26,移出适配计划
2025-12-5
添加 JH16 PCB
2025-12-7
添加 JH16 3D 外壳
修复热插拔版本的铺铜
2025-12-10
修复 X Y 轴标识错误
更改 JH16 PCB(此前 X Y 轴连接错误)
删除旧的热插拔版本
更新半高摇杆外壳模型(JH16)
2025-12-11
修改命名
修改孔径
恢复上外壳外径至29mm
添加谷粒tmr可调阻尼摇杆/半高摇杆安装指南
2025-12-14
确认js16pro同封装适配
2025-12-16
修复全高摇杆引脚过长无法装入下壳体的错误
2025-12-22
让JLC 3D打印不再报错(简化上壳体三角面,尺寸和旧版保持一致)
2025-12-30
再次修复全高摇杆引脚过长无法装入下壳体的错误
2026-1-23
修改热插拔版本PCB
注意:热插拔版本可能需要在下壳体开孔
2026-6-12
增加下压微动版本
修改上壳体和下壳体模型
验证JT13适配
设计图
BOM
 克隆工程
克隆工程工程成员
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









