

LimeMini电机驱动板(适配LimeRC)
简介
一款小小的电机驱动器,可同时驱动3路舵机+3路电机+1路LED灯,适配LimeRC数字图传遥控器系统,也兼容市面上常见航模接收机。
简介:一款小小的电机驱动器,可同时驱动3路舵机+3路电机+1路LED灯,适配LimeRC数字图传遥控器系统,也兼容市面上常见航模接收机。开源协议
:CC BY-SA 4.0
描述
0:关于版权
该电机控制板软硬件完全开源,大家随意使用,随意更改,
随意二创,随意商用,up不会追究任何责任~
1:功能介绍
这是一个小小的电机驱动板,可用于机器人项目or遥控玩具改装。
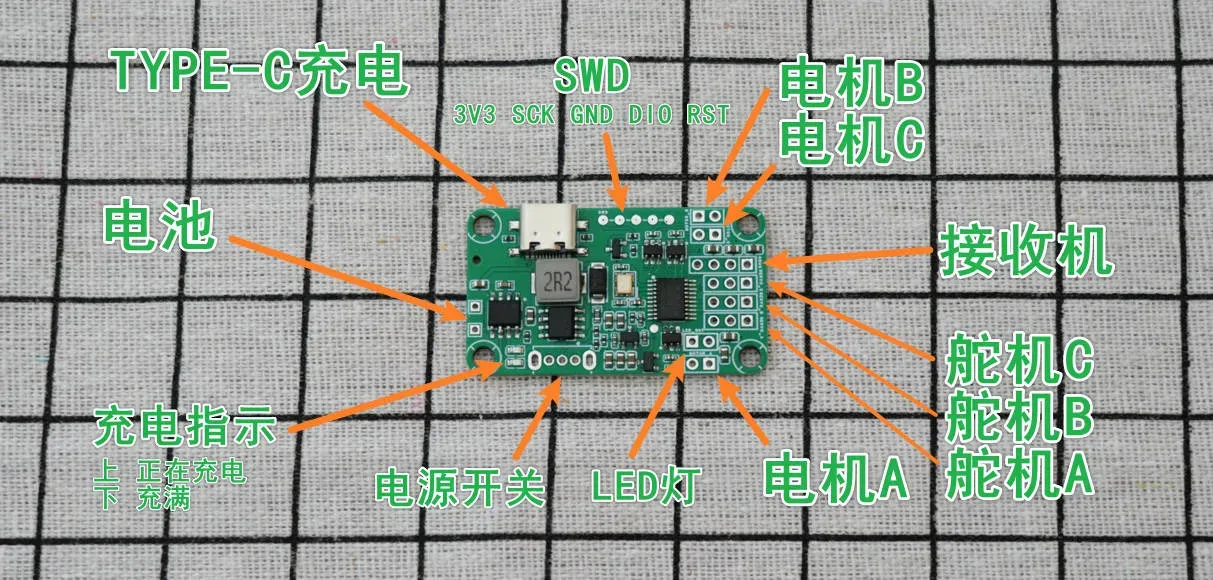
板子上集成了电池充电、升压电路、电机H桥驱动芯片,以及TTL电平反向电路,只需增加一枚接收机作为信号输入,即可用它控制:
- 3路电机:可控制电机正反转,以及PWM调速
- 3路舵机:可产生舵机需要的脉冲信号,以控制3路舵机正反转
- 1路LED灯:可控制灯光亮灭
如下:
2:使用
配套程序完全开源,使用CubeMX+Keil5 MDK作为开发环境,程序内已封装好如下接口:
- 电机驱动:PWM输出+GPIO输出
- 舵机驱动:PWM输出
- 接收机数据处理:串口IDLE+DMA接收
测试舵机信号如下:
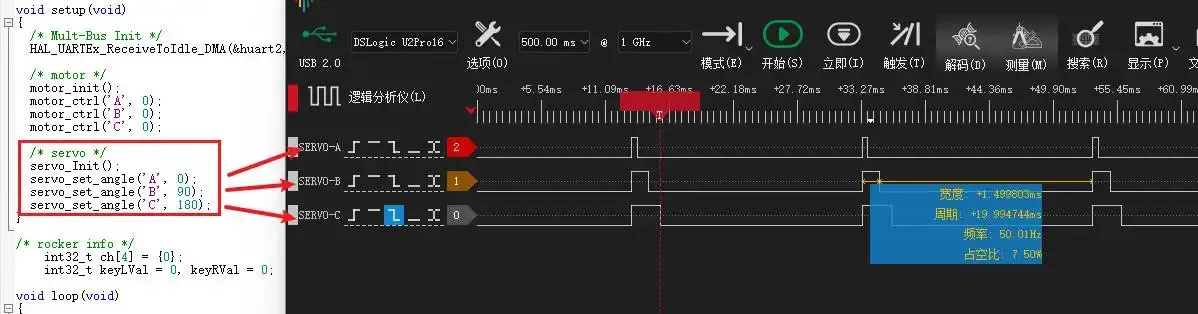
电机、LED等信号较为简单,此处不再赘述
3:与LimeRC数字图传遥控器协作
> LimeRC数字图传遥控器开源链接如下:https://oshwhub.com/phantom001/limerc3-1_release
> 或直接在立创开源广场搜索LimeRC关键字找到
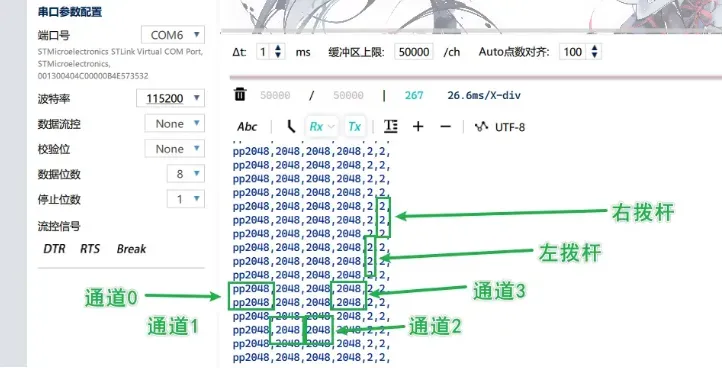
程序中默认对pp协议进行解码,遥控器端需在设置内选择PP协议-电平反向

pp协议采用可视ASCLL码编码,实际输出为字符串,串口参数115200-8-N-1,格式如下:
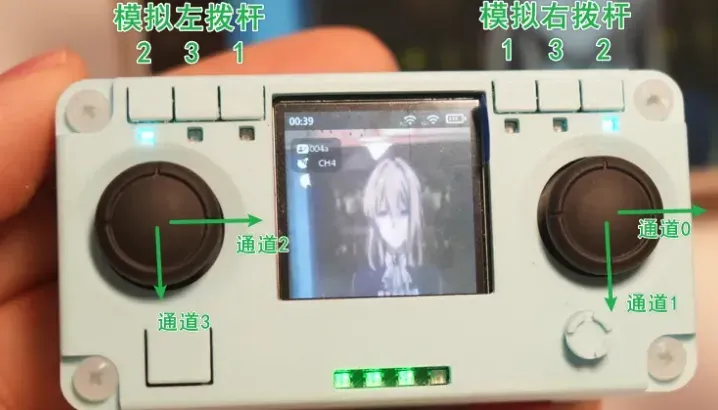
> pp<通道0>,<通道1>,<通道2>,<通道3>,<左拨杆>,<右拨杆>,\r\n
模拟摇杆通道0~3,值范围为:0(负方向)~2048(中间)~4095(正方向),通道与正方向见下图
其中<左拨杆>和<右拨杆>编码规则如图所示,
当接收机输出正常TTL电平时,可直接使用串口调试助手查看数据:
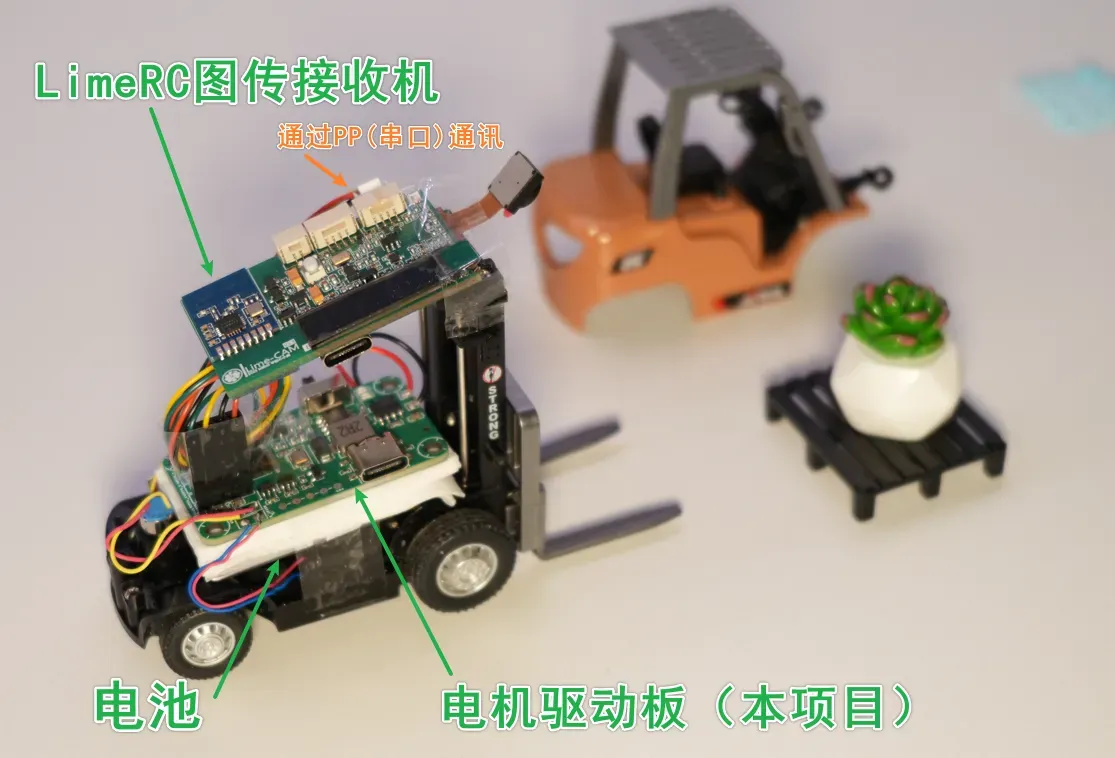
4:实际应用
这里简单展示一个桌面玩具叉车模型改装,
小车上有3个电机,它们的作用如下:
- 电机A:控制车辆前后运动
- 电机B:控制升降
- 电机C:控制转向
对应代码如下(详细代码见附件):
while(1)
{
/* pp decoder */
sscanf((char*)uart_idle_rx.rx_buf + 2, "%d,%d,%d,%d,%d,%d\r\n", &ch[0], &ch[1], &ch[2], &ch[3], &keyLVal, &keyRVal);
/* remap rocker to -2048 ~ 2047 */
for(uint8_t i = 0; i < 4; i++)
ch[i] -= 2048;
/* set motor power (mini RC Car) */
motor_ctrl('A', -ch[1] / 2048.0f * 100.0f / 3.0f);
motor_ctrl('B', ch[3] / 2048.0f * 100.0f / 2.0f);
motor_ctrl('C', ch[2] > 800 ? 100 : ch[2] < -800 ? -100 : 0 );
}
该项目展示见B站LimeRC介绍视频开头:
https://www.bilibili.com/video/BV1mykQBaEz4/?spm_id_from=333.1387.homepage.video_card.click&vd_source=887acdef0f32cee9729647ed33eac99f
4:一些小Tips
- Keil开发环境需要安装STM32 G0芯片包,别忘了安装哦
- 硬件设计较为简单,推荐大部分原件直接嘉立创SMT,主要芯片通过TB购买然后自行焊接,详见附件:hardware
- 建议关闭电源进行充电,即充好电再使用,不要边充边用
- 若舵机功率较大,接收机可能需要额外的电源供电,请做好电源冗余
- 有任何问题,欢迎B站私信 平韵の小窝
5:更新日志 & 致谢
2025-12-4:感谢B站网友Agan___反馈,立创EDA PCB预览图更新,但打开后工程仍未更新。问题现已修复。(旧版本多一个外部晶振,实际该晶振是不必要的,G0内置振荡器精度足够满足该项目使用,无需外部晶振)
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









