


专业版
基于地奇星开发板内阻测试仪
451
0
0
0
简介
基于地奇星的电池内阻测试仪
简介:基于地奇星的电池内阻测试仪开源协议
:GPL 3.0
创建时间:2025-12-15 22:10:30更新时间:2026-03-21 15:45:16
描述
项目简介
本项目是基于地奇星的电池内阻测试仪。
项目功能
可以测试大部分电池的内阻,以及阻容感在1Khz下的ESR
项目参数
最大量程1.5欧,二档150毫欧,分辨率分别为0.5欧和0.05欧。
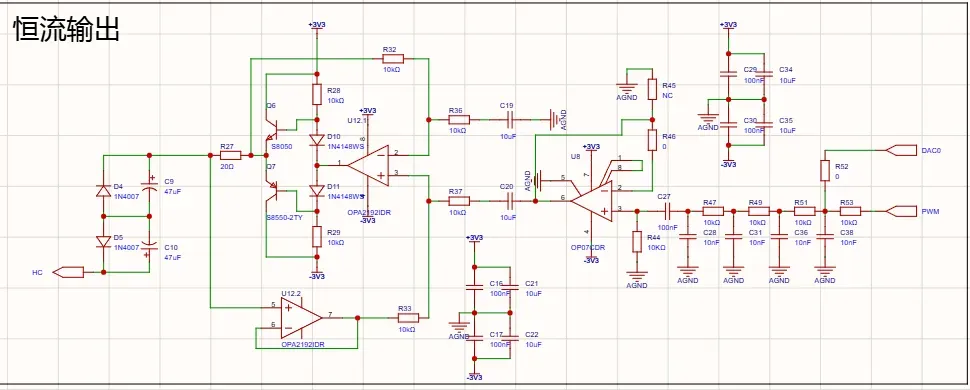
原理解析(硬件说明)
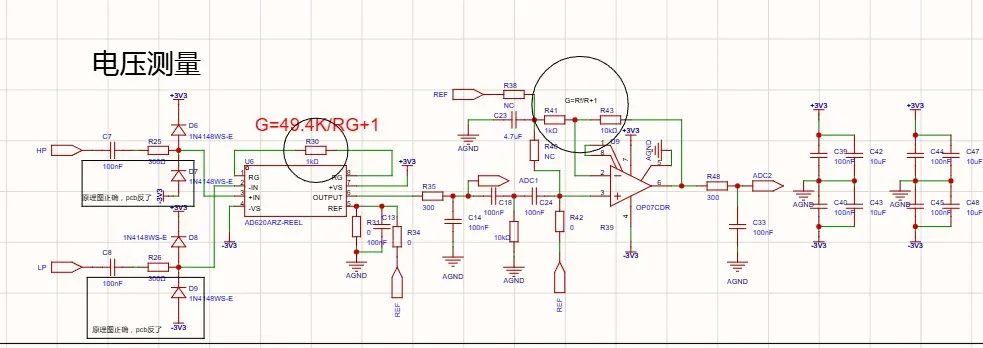
单片机使用spwm以50khz产生PWM低通滤波过后,驱动恒流电路产生恒流,加载至被测电池端,然后测试电池两端电压,根据R=U/I,U经运放后送至ADC,可测得,I为恒定,由此可知R。
- 恒流激励电路
2. 电池两端电压放大测量,挡位部分
3. 供电,电池切换,充电电路,电池保护电路
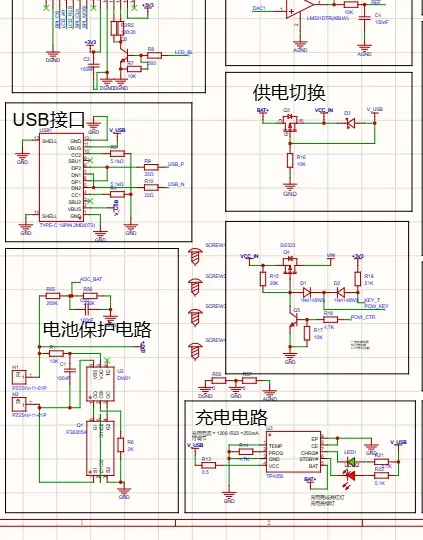
4. 地奇星插座,屏幕座及按键
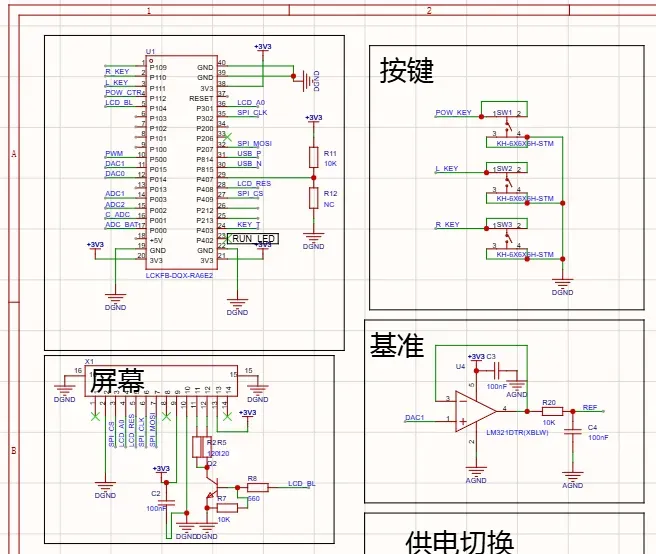
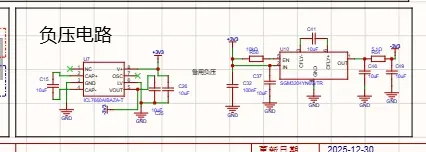
5. 负压电路用于运放负电源
6.
软件代码
1.先实现printf,参考官方示例
#include "bsp_uart.h"
// 发送完成标志位
volatile bool Uart0_Send_Flag = false;
// 接收完成标志位
volatile bool Uart0_Receive_Flag = false;
// 写入的字节
uint32_t bytes = 1;
//调试串口 UART0 初始化
void UART0_Debug_Init(void)
{
fsp_err_t err = R_SCI_UART_Open (&g_uart0_ctrl, &g_uart0_cfg);
if (FSP_SUCCESS != err) {
printf("串口初始化失败! \n");
return;
}
}
/* 串口中断回调 */
void uart0_callback(uart_callback_args_t *p_args)
{
switch (p_args->event)
{
case UART_EVENT_RX_CHAR: //收到数据
{
R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t*) &(p_args->data), bytes);
break;
}
case UART_EVENT_RX_COMPLETE: //接收完整的事件
{
Uart0_Receive_Flag = true;
break;
}
case UART_EVENT_TX_COMPLETE://发送完整的事件
{
Uart0_Send_Flag = true;
break;
}
default:
break;
}
}
// 串口重定义
// 函数前置声明(仅需声明一次)
int __io_putchar(int ch);
int _write(int fd, char *pBuffer, int size);
int _close(int fd);
int _lseek(int fd, off_t ptr, int dir);
int _read(int fd, char *pBuffer, int size);
int _fstat(int fd, struct stat *pStat);
int _isatty(int fd);
// 弱符号实现(仅需实现一次)
__attribute__((weak)) int _close(int fd) {
(void)fd; // 忽略未使用参数
return -1;
}
__attribute__((weak)) int _lseek(int fd, off_t ptr, int dir) {
(void)fd; (void)ptr; (void)dir;
return -1;
}
__attribute__((weak)) int _read(int fd, char *pBuffer, int size) {
(void)fd; (void)pBuffer; (void)size;
return 0;
}
__attribute__((weak)) int _fstat(int fd, struct stat *pStat) {
(void)fd; (void)pStat;
return -1;
}
__attribute__((weak)) int _isatty(int fd) {
(void)fd;
return 1;
}
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE {
fsp_err_t err;
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if (FSP_SUCCESS != err) __BKPT();
while (Uart0_Send_Flag == false);
Uart0_Send_Flag = false;
return ch;
}
int _write(int fd, char *pBuffer, int size) {
(void)fd; // 忽略未使用参数
R_SCI_UART_Write (&g_uart0_ctrl, (uint8_t*) pBuffer, (uint32_t) size);
while (Uart0_Send_Flag == false);
Uart0_Send_Flag = false;
return size;
}
2.读取电池两端电压ADC
uint16_t ADC_read_Ad(void)
{
uint16_t adc_data = 0;
// 启动ADC扫描
fsp_err_t err = R_ADC_ScanStart(&g_adc0_ctrl);
if (FSP_SUCCESS != err) {
printf("ADC扫描启动失败! \n");
return 9999; // 返回错误值
}
// 等待ADC转换完成
while (!adc_flag);
adc_flag = false; // 清除标志位
// 读取ADC数据
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_7, &adc_data);
if (FSP_SUCCESS != err) {
printf("ADC数据读取失败!\n");
return 9999; // 返回错误值
}
//printf("%d\r\n",adc_data);
return adc_data;
}
3.计算内阻
// 计算内阻(单位:欧姆)
float Calculate_Resistance(float voltage_rms_adc) {
float voltage_at_adc; // ADC输入引脚的电压
float voltage_at_battery; // 电池两端的真实电压
float resistance; // 内阻值
// 1. ADC原始值转电压值(单位:V)
voltage_at_adc = voltage_rms_adc * ADC_REF_VOLTAGE / ADC_RESOLUTION;
// 2. 除以放大增益,得到电池端真实电压
voltage_at_battery = voltage_at_adc / AMP_GAIN;
// 3. 欧姆定律:R = V / I
resistance = voltage_at_battery / CONST_CURRENT;
// 4. 转为毫欧显示(可选)
return resistance * 1000; // 返回毫欧值
}
4.主函数状态机实现思路(未实现)
typedef enum {
WAITING, // 等待测量
SAMPLING, // 采集中
CALCULATING, // 计算中
DISPLAYING // 显示中
} state_t;
state_t current_state = WAITING;
volatile uint8_t measurement_ready = 0;
float last_result = 0;
void main(void) {
// 初始化
System_Init();
ADC_Init();
Timer_Init(); // 配置定时器触发ADC(48kHz)
while(1) {
switch(current_state) {
case WAITING:
if(Button_Read()) {
// 开始测量
ADC_Start_DMA(adc_buffer, SAMPLE_POINTS);
current_state = SAMPLING;
}
break;
case SAMPLING:
if(measurement_ready) {
measurement_ready = 0;
current_state = CALCULATING;
}
break;
case CALCULATING: {
// 提取1kHz分量
float rms_adc = Extract_1kHz_Amplitude(adc_buffer, SAMPLE_POINTS);
// 计算内阻
last_result = Calculate_Resistance(rms_adc);
current_state = DISPLAYING;
break;
}
case DISPLAYING:
// 显示结果(例如:12.34 mΩ)
LCD_ShowFloat(last_result, 2); // 显示2位小数
LCD_ShowString(" mΩ");
current_state = WAITING;
break;
}
}
}
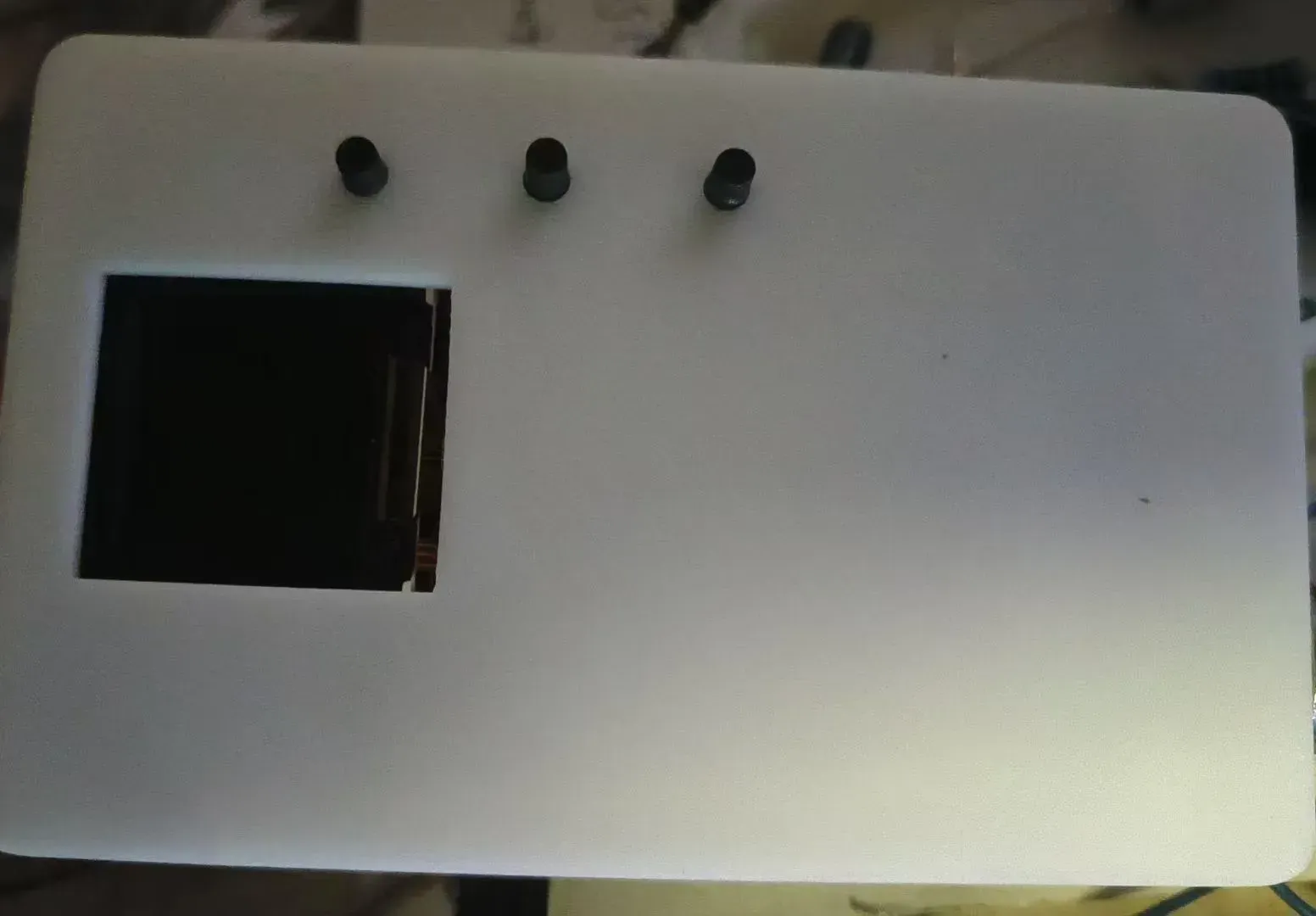
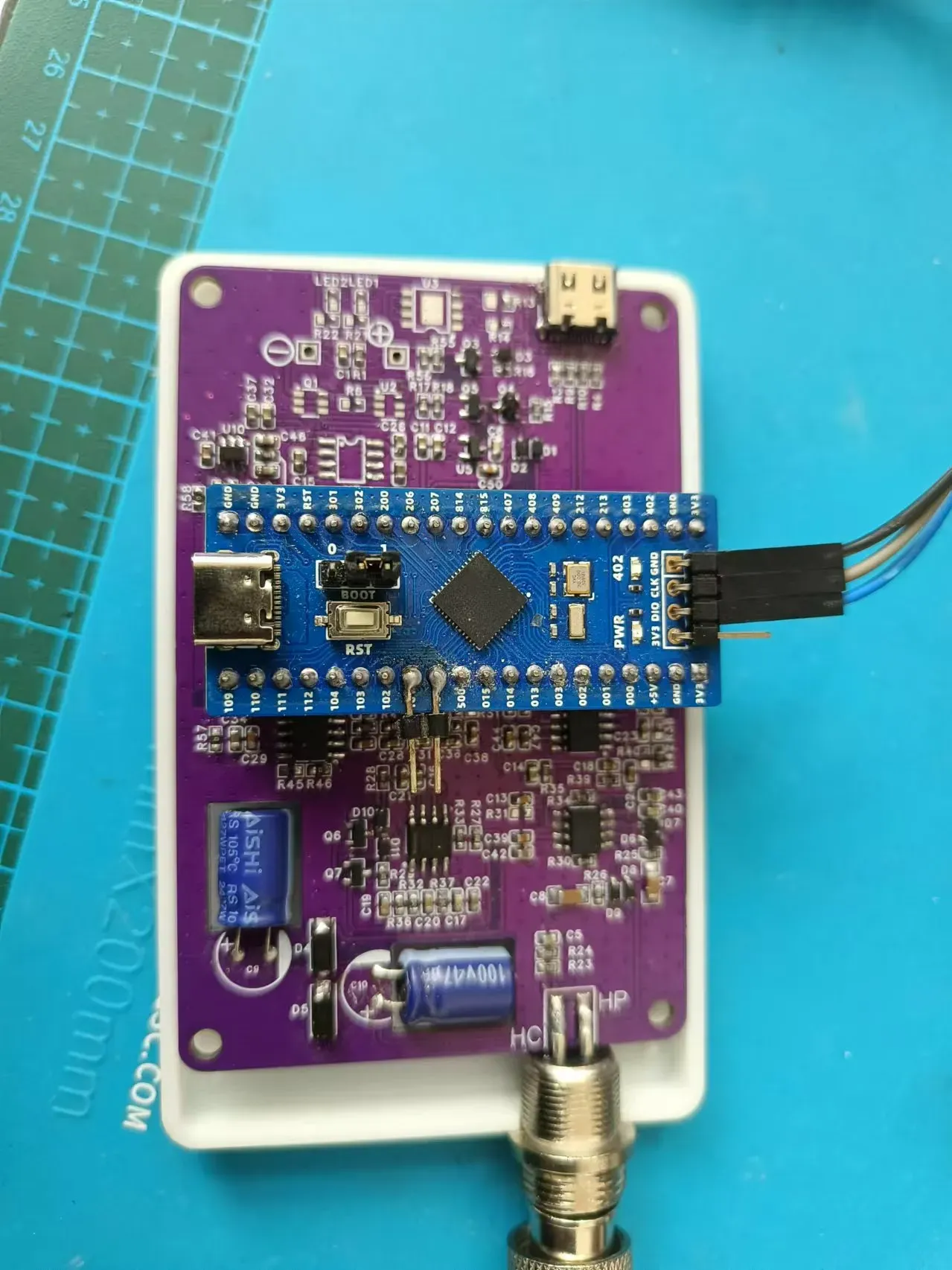
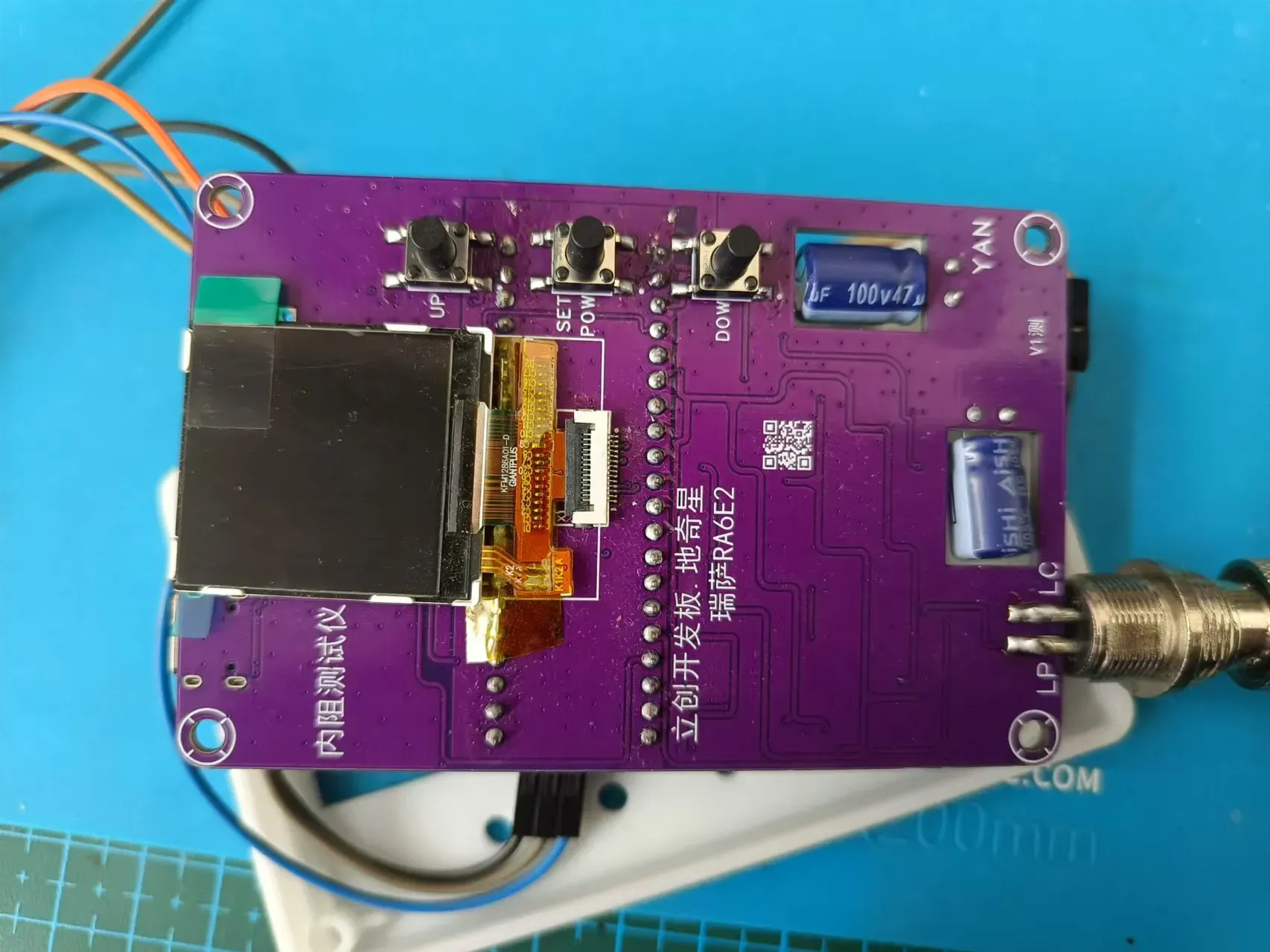
实物图
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









