


琛光E1 Mini ESP32无人机 开源版
简介
基于ESP32开发板的迷你四轴无人机,主控使用ESP32开发板,仅使用一块陀螺仪传感器,自带WEB遥控器。极简的硬件和软件设计更容易上手,只需简单的焊接,无需复杂配置,手机连接即可起飞。简约而不简单!
简介:基于ESP32开发板的迷你四轴无人机,主控使用ESP32开发板,仅使用一块陀螺仪传感器,自带WEB遥控器。极简的硬件和软件设计更容易上手,只需简单的焊接,无需复杂配置,手机连接即可起飞。简约而不简单!开源协议
:GPL 3.0
(未经作者授权,禁止转载)描述
一、项目简介

基于ESP32开发板的迷你四轴无人机,主控使用ESP32开发板,仅使用一块陀螺仪传感器,自带WEB遥控器。极简的硬件和软件设计更容易上手,只需简单的焊接和固件刷写,无需复杂配置即可起飞。
飞机自带网页遥控器,手机访问即可控制,不需要额外安装APP或实体遥控。当然也支持APP和实体遥控。
简约而不简单,每处细节都经过仔细打磨!
QQ交流群 748767634 欢迎加群讨论,有问题可以群里反馈或评论
二、视频链接:
[B站视频--详细介绍+组装教程]
[B站视频--试飞1]
[B站视频--试飞2]
[B站视频--网页遥控操控手动定高]
三、项目复刻
照着做,肯定能飞!复刻仅需三步:
- 硬件组装
- 软件刷写
- 简单调试
第1步 硬件组装
1、下载 附件中的【物料清单表格】,对照物料清单准备材料或购买物料包,并在嘉立创制作PCB。
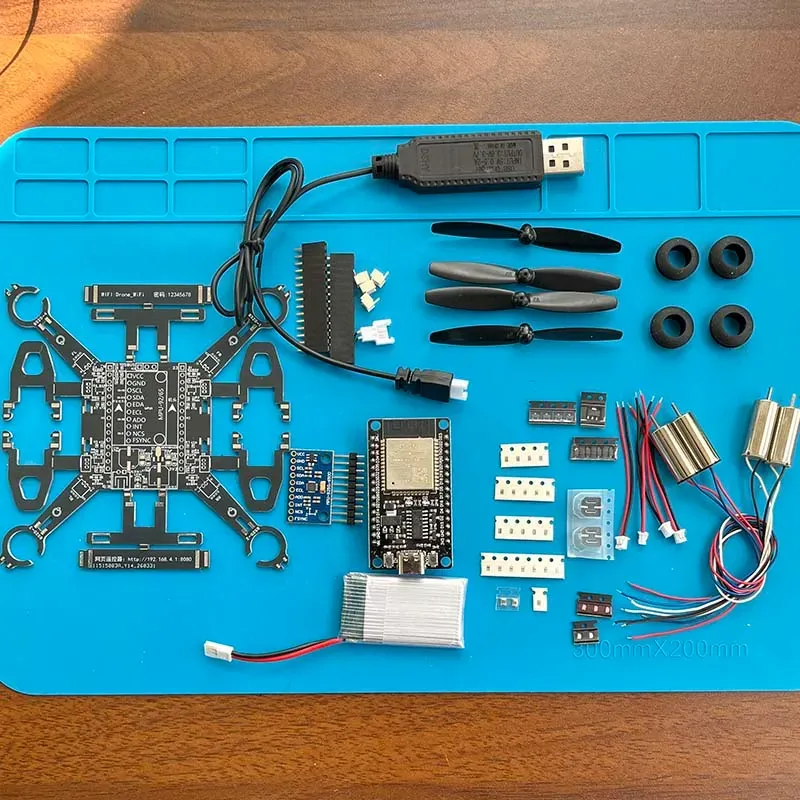
单套实际使用物料成本约45元。但是考虑到运费和起购量,物料实际购买成本稍高于单套成本。
嘉立创下单PCB时请忽略掉网表错误,实际没有问题。
PCB板厚度尽量使用嘉立创默认的1.6mm厚度,底座和支架的插接尺寸是按1.6mm设计的。
主要部件尽量购买质量好一些的,配件质量参差不齐,会直接影响制作效果。
开发板为ESP32 30PIN,没接触过开发板的朋友需要注意ESP开发板有较多版本C3/S3/CAM等,需要的是ESP32没有后缀的版本,针脚30针。
电池为1S航模/无人机电池,电压3.7-4.2V,不要买普通锂电池,需要较高的放电倍率。
BOM表仅含电路元件,且直接下单可能会匹配错误,仅供参考。全部物料在附件中的物料清单表格,有型号、封装和详细说明。
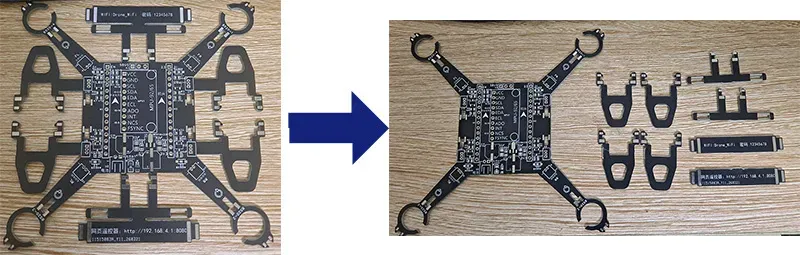
2、拆解PCB。
前后左右为电机座和支架部分,中间为主控板部分,新的PCB加了对应分割的丝印。由于拼版不能使用免费券,所以PCB没有分割。组装前要把主控板部分和电机座、挂架分开。拆解的时候可以借助工具,用水口钳可以很容易的剪开。
3、焊接元件。
如果是用电烙铁焊接,建议先焊接最小的贴片元件,再焊接较大的贴片元件,最后焊接插接元件和排针、针座等。

主控板上有两个较大的470uf电容,是为了缓解电池压力,如果买的电池品质比较好,可以不用这两个电容。LED灯也是非必要部件,可以不装。
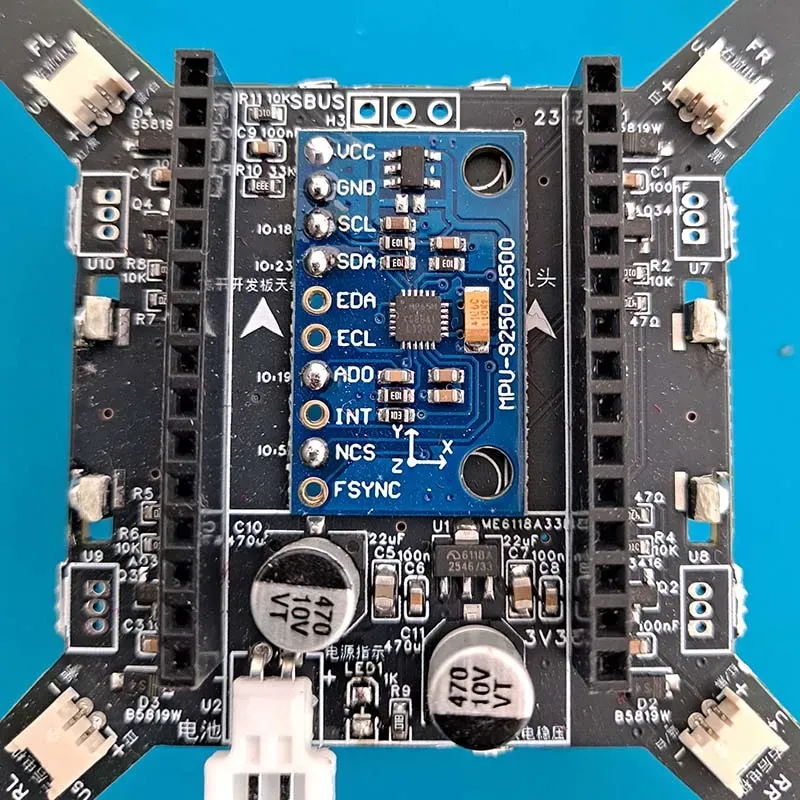
陀螺仪模块可以贴着主控板焊接,不用排针,可以减小安装偏差。也可以使用排针焊接。
陀螺仪模块可以只焊接VCC / GND / SCL / SDA / AD0 / NCS这几个引脚
建议焊接完成后先用万用表简单测试电路是否有虚焊、短路,确认没有问题再通电。30年老焊工电烙铁焊接0603元件也不能保证一次成功。
4、焊接电机底座和支架。
电机座能在飞机失控时很好的保护无人机,也当做整个飞机的支撑使用。建议安装。
支架可以用来放电池,支架高度12mm,厚度小于12mm的电池都可以放得下,可以再用个皮筋固定一下电池。
支架附近都留有焊盘,用焊锡加固。
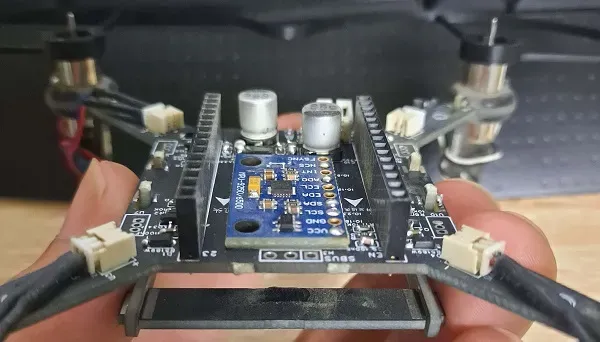
焊好的样子

背面
5、安装电机。
电机由胶圈固定到支架上,或者直接用热熔胶固定。
电机方向需要注意,PCB板有转向对应丝印,且对角的两个电机方向一致。
电机转动方向参考:
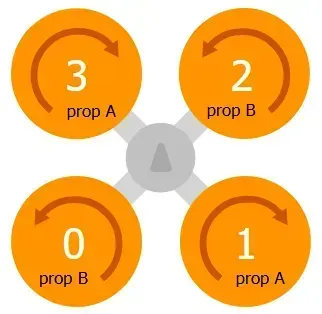
建议购买2个黑白线和2个红蓝线电机,区分颜色安装更直观;也可以只买4只相同颜色线的电机。PCB板上也做了丝印,标明了线颜色和正负。
6、安装桨叶
桨叶也必须按照指定方向安装!电机按标识方向转动时桨叶高的一侧在前面,向下吹风。且对角的桨叶方向一致。可以参考下图的安装方向。
最稳妥的办法是调试完成后,解锁电机,确认4个桨叶都是向下吹风。

桨叶保护罩是3D打印件,模型文件在附件,可以下载打印。装上比较安全,建议安装。
第2步 软件刷写
1、下载附件中编译好的BIN固件文件。
2、使用USB数据线连接ESP32开发板和电脑。
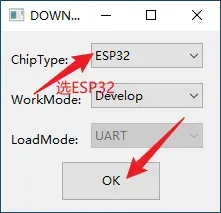
3、使用乐鑫官方工具刷写。
下载地址:https://docs.espressif.com/projects/esp-test-tools/zh_CN/latest/esp32/production_stage/tools/flash_download_tool.html
刷写设置:
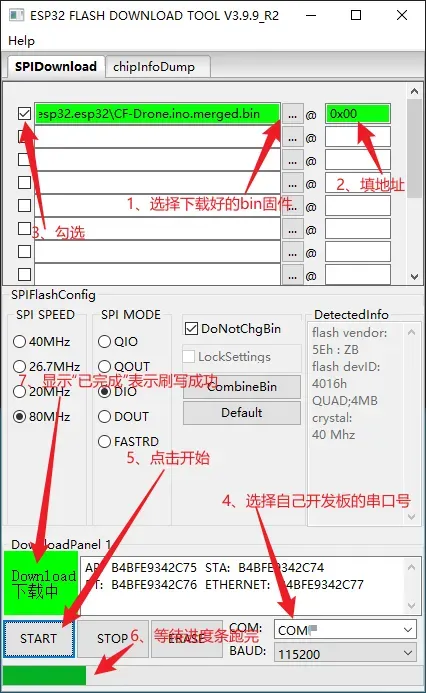
串口号如果不知道是哪一个,可以插拔开发板,看哪个串口号变动就选哪一个
第3步 调试、起飞
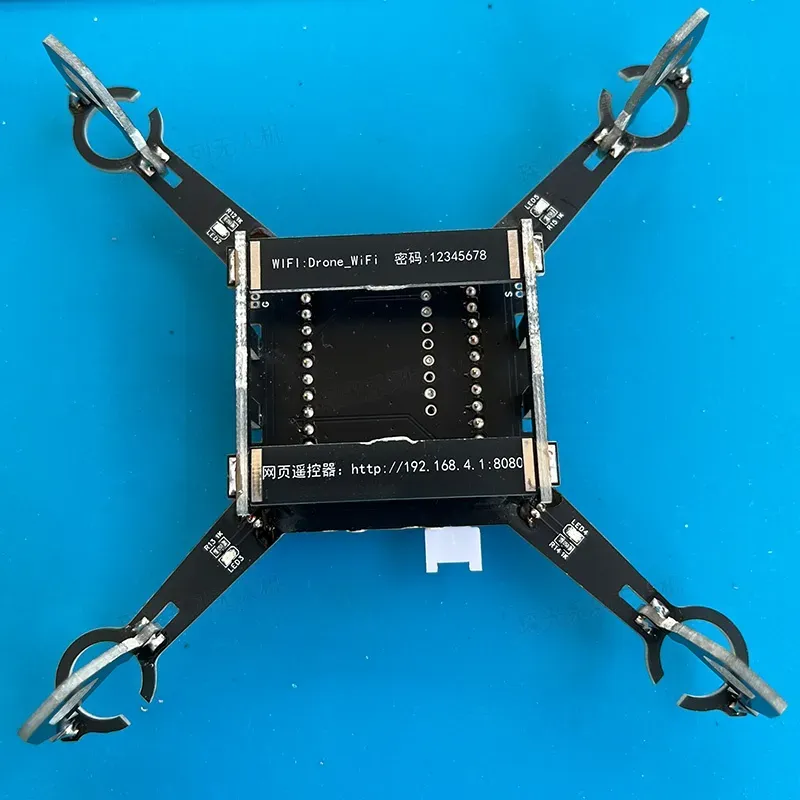
1、给无人机接好电池,手机搜索WIFI:Drone_WIFI,密码:12345678。部分手机有自动网络优化功能,会自动切换无线和流量,需要关闭;或者更直接的办法:关闭手机流量。
2、打开手机浏览器,输入:http://192.168.4.1:8080 确认后打开遥控器界面。

3、调试。
在网页遥控器中点击“调试”按钮,在弹出的调试界面中可以输入调试命令。建议调试前先摘掉桨叶。
校准陀螺仪(必做),消除陀螺仪零飘。输入调试命令“ca”,按照提示摆放无人机。手机可能字很小,参考这段提示:
1/6 水平放置:机头朝前(正常飞行方向),底部朝下水平放置在平坦表面,确保完全水平无倾斜。保持不动,8秒后开始校准;
水平校准完成。请继续。
2/6 机头朝上:保持机头朝前,将机头指向天空,尾部朝下并接触支撑面,与地面垂直。保持不动,8秒后开始校准;
机头向上校准完成。请继续。
3/6 机头朝下:保持机头朝前,将机头指向地面并接触支撑面,尾部朝上,与地面垂直。保持不动,8秒后开始校准;
机头向下校准完成。请继续。
4/6 右侧朝下:保持机头朝前,将飞行器右侧朝下并接触支撑面,左侧机臂朝上,与地面垂直。保持不动,8秒后开始校准;
右侧向下校准完成。请继续。
5/6 左侧朝下:保持机头朝前,将飞行器左侧朝下并接触支撑面,右侧机臂朝上,与地面垂直。保持不动,8秒后开始校准;
左侧向下校准完成。请继续。
6/6 倒置放置:保持机头朝前,将飞行器完全翻转,顶部朝下、底部朝上,整体呈水平倒置状态。保持不动,8秒后开始校准;
✓全部校准完成!将机身放正,执行ps命令查看校准结果。
校准完成后,将无人机放正(顶部朝上),输入命令“ps”查看校准结果。会看到类似:
roll: 0.521120 pitch: -0.062948 yaw: 82.711197
roll/pitch接近于0即校准成功,正常范围以内,合格范围2以内,超过5需要重新校准。yaw可忽略,mpu6500没有磁力计,yaw轴为虚拟计算数值。
调试电机(选做),先去掉电机上的桨叶!以免伤人!分别输入命令“mfl/mfr/mrl/mrr”对应左前、右前、左后、右后4个电机,观察4个电机是否正常转动。
如果手机屏幕过小,调试不方便,也可以使用arduino或GQC调试。参考深入研究章节中的内容。
4、起飞。点击解锁按钮,推油门,起飞!

四、深入研究
如果只是简单复刻,以下部分可忽略。
飞控固件开源
github: https://github.com/songge8/CF-Drone
飞控软件使用arduino开发,可以使用arduino进行开发、编译,arduino IDE自带的控制台,也可用于飞机调试。
飞机也可以使用任意开发语言编写的支持ESP32的飞控程序,能支持MPU6500即可。
支持手机APP遥控、实体遥控和MAVLINK协议的遥控
QGC手机APP
APP可在QGC官网https://qgroundcontrol.com/ 下载。
除了可以用于控制飞机,APP-Analyze Tools-Mavlink控制台也可以用于飞控调试。
实体遥控
主板预留一组3P接口,默认为SBUS接口,可使用SBUS遥控器。连接好遥控后需要通过arduino控制台/GQC/网页遥控调试中使用“cr”命令校准遥控器。
MAVLINK
固件支持MAVLINK协议。
预留接口
主板预留一组3P接口,连接开发板GPIO4,可用于连接遥控等外部设备或给外部设备供电。
图传
可以参考评论区或视频教程评论中网友的实现方案。
五、致敬
本项目大量致敬了各位大神的开源项目
乐鑫esp-drone、okalachev/flix、malagis
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









