



开源协议
:GPL 3.0
描述
前言:首先感谢嘉立创以及地瓜机器人提供的活动,参加活动提供的劵大大降低了制作成本,让扣扣嗖嗖的我也能自己手搓一台机器人。
理想很丰满,现实很骨感。活动初期的我在制作机械臂模块的时候,本打做6轴机械臂的,但无奈。2804电机单颗价格已经40元,算上驱动、减速器成本更是直线上升。(其实是技术太菜搞不出来,毕竟6轴机械臂不只是动起来这么简单,其中的运动学算法就够我学一阵子。但目前作者正在实习,每天只能下班后搞一搞T^T)
所以,我把6轴机械臂砍掉了哈哈哈哈哈哈,改为更简单的3轴机械臂。
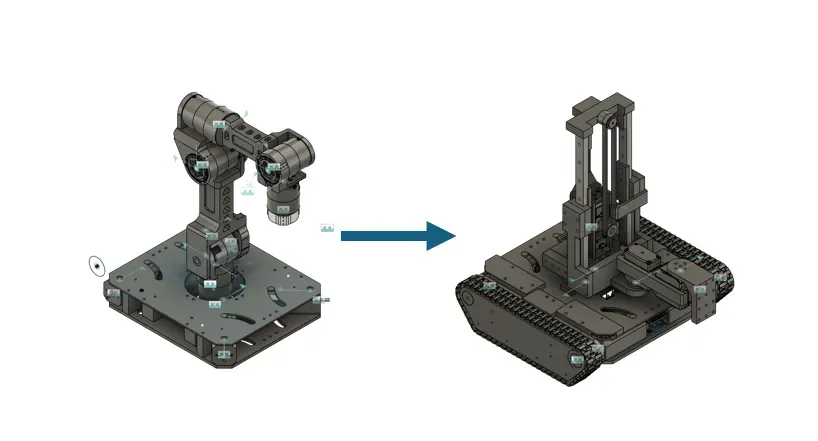
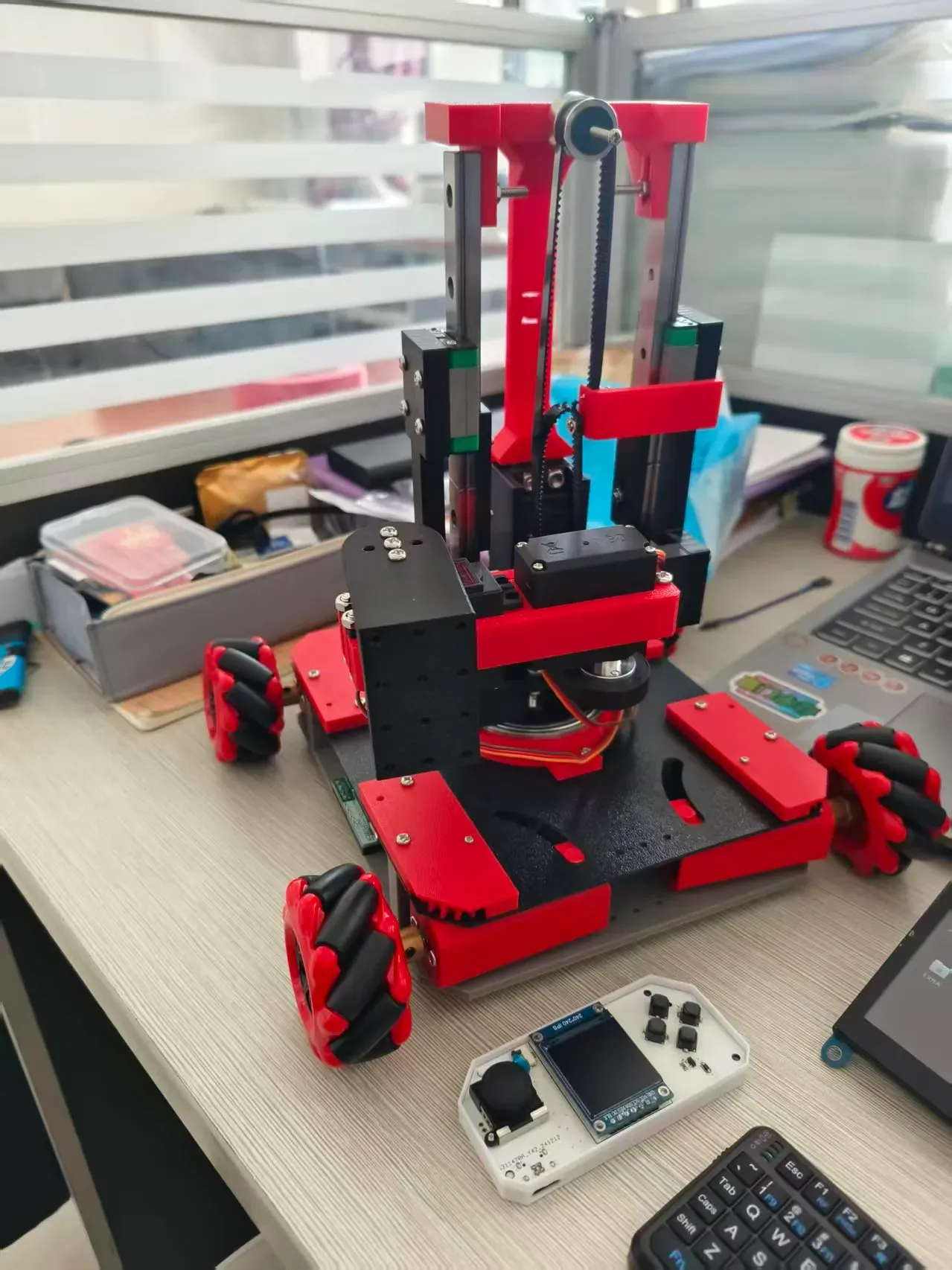
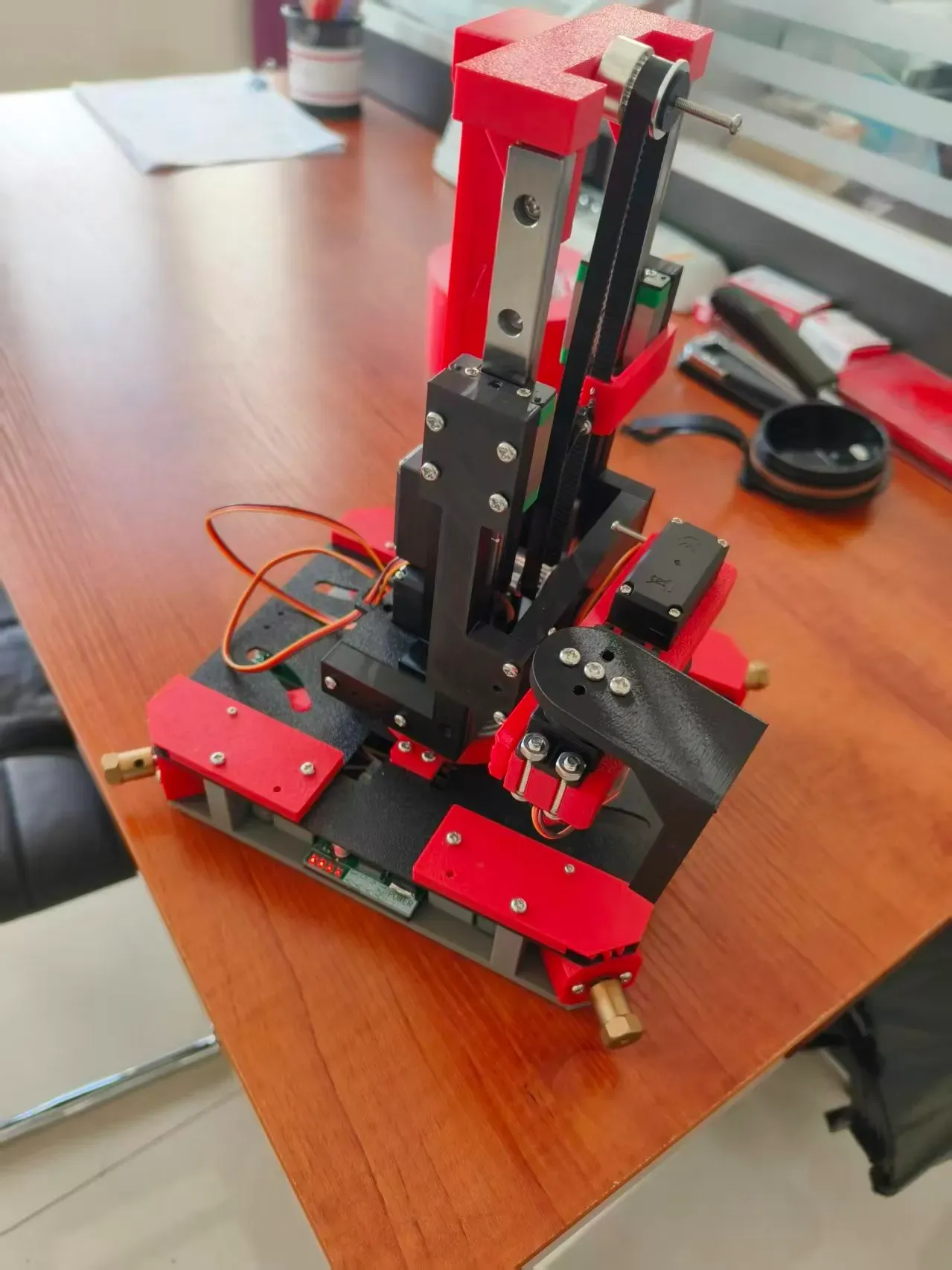
ok,先实物展示一波

本次项目分为两部分:小主机和小车车;
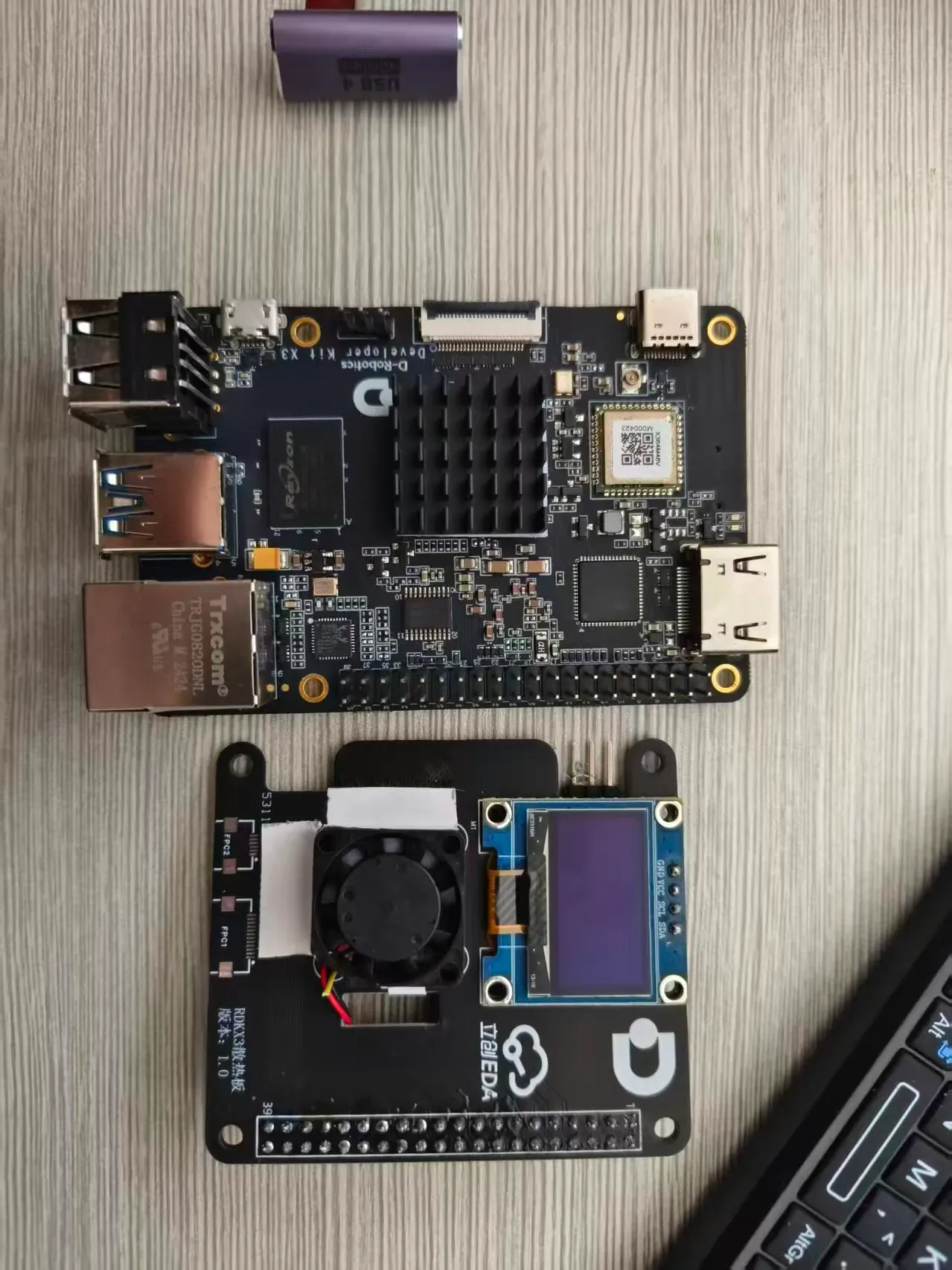
先说小主机,小主机采用的地瓜机器人的RDKX3开发板,加上散热板、外壳构成。得益于地瓜机器人的开发板接口齐全,我们可以外置拓展屏幕以及键盘。同时,作者也在制作小主机端控制小车车的软件,目前功能较少,后续会打包发布。
小主机性能不错,居然可以看B站!虽然有时候跑ROS实验CPU直接100%。
^上位机软件
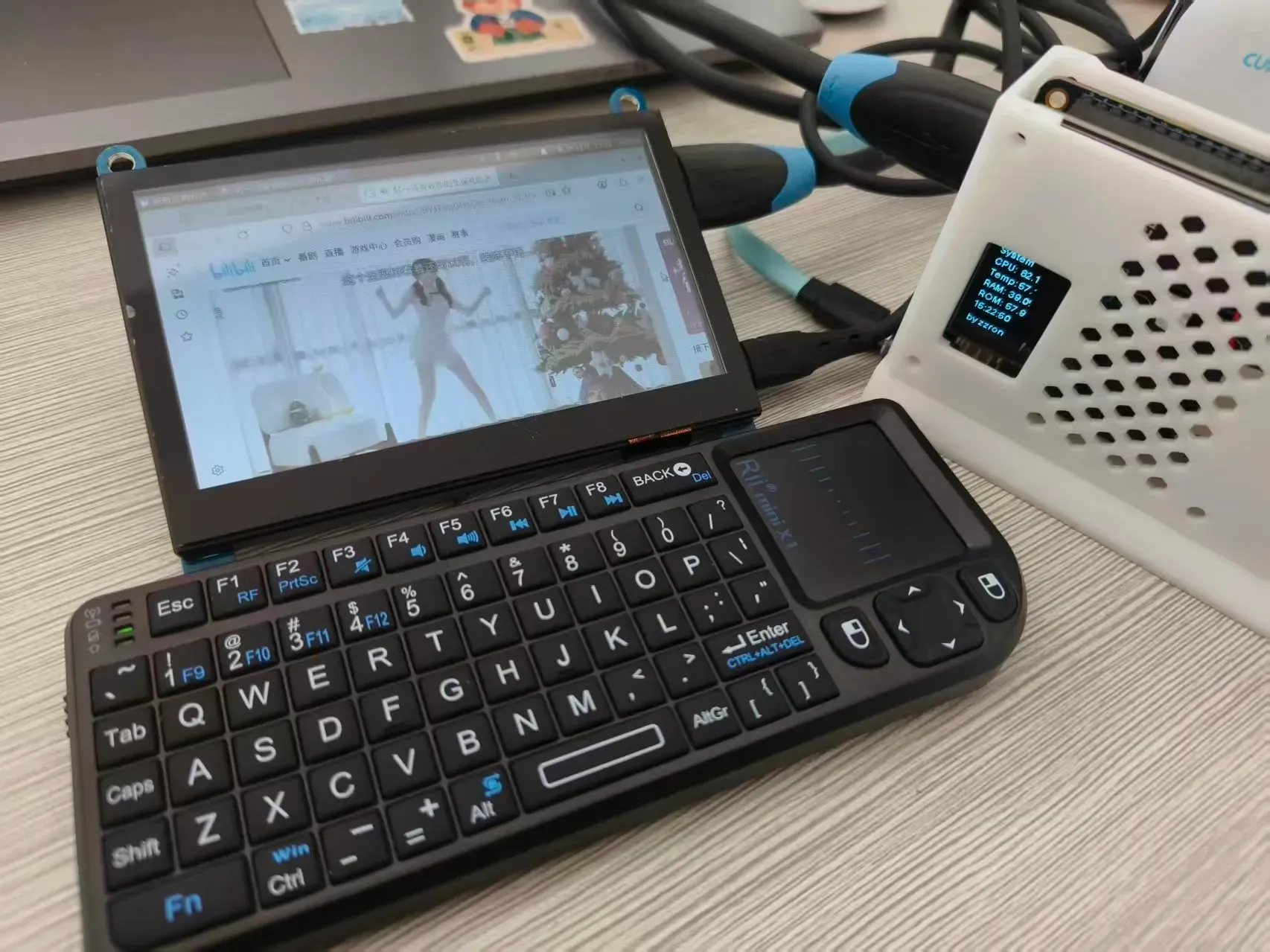

^小主机娱乐展示
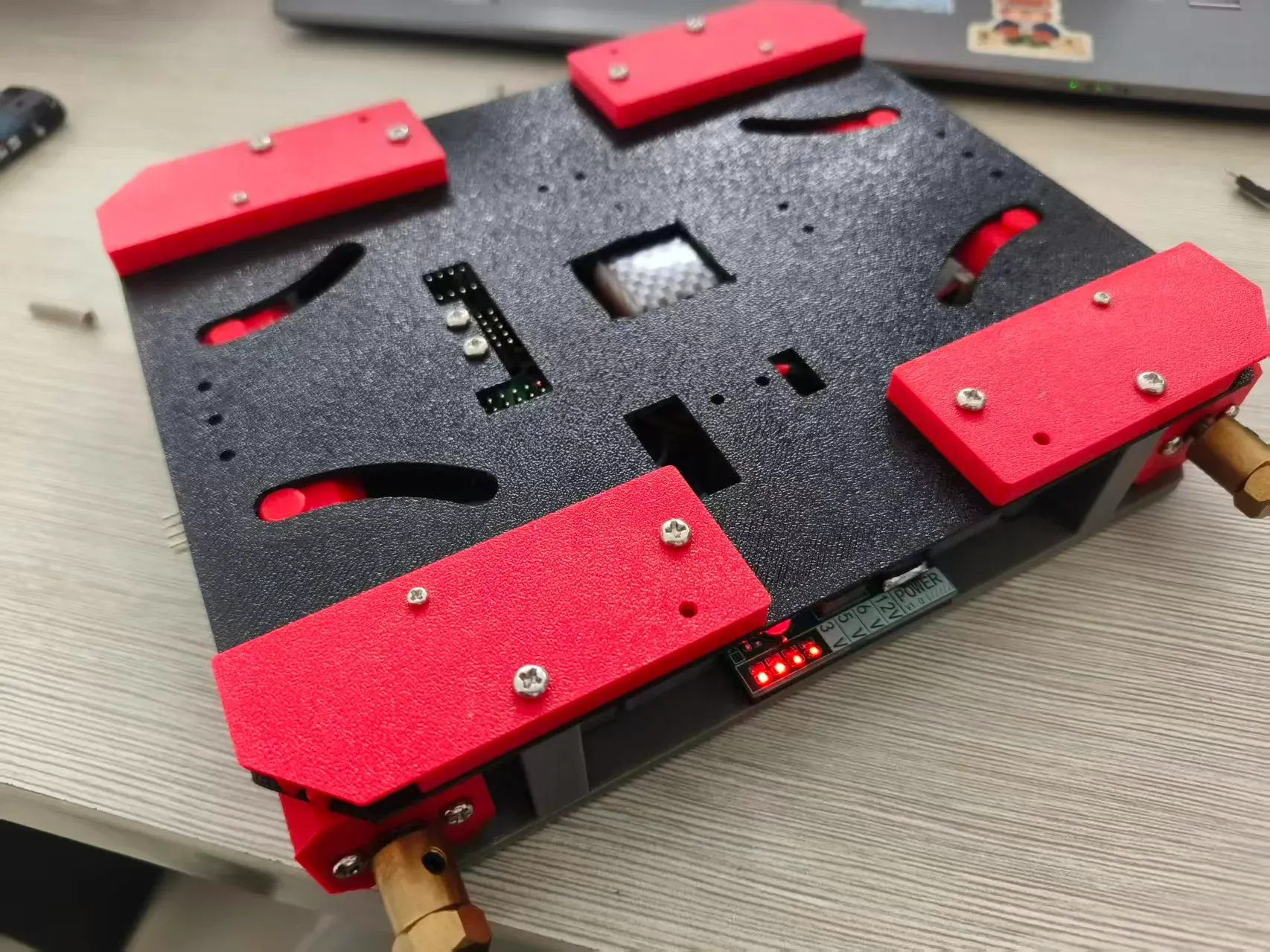
再来说说小车车,小车车目前的构思是模块化,但是现在完成的就底盘和机械臂,其他模块还未来得及组装(主要是机械结构难设计,目前的拆装还是依靠打螺丝,后续会重新设计快拆,而且现在比较丑,走线啥的设计当初没考虑T^T)。
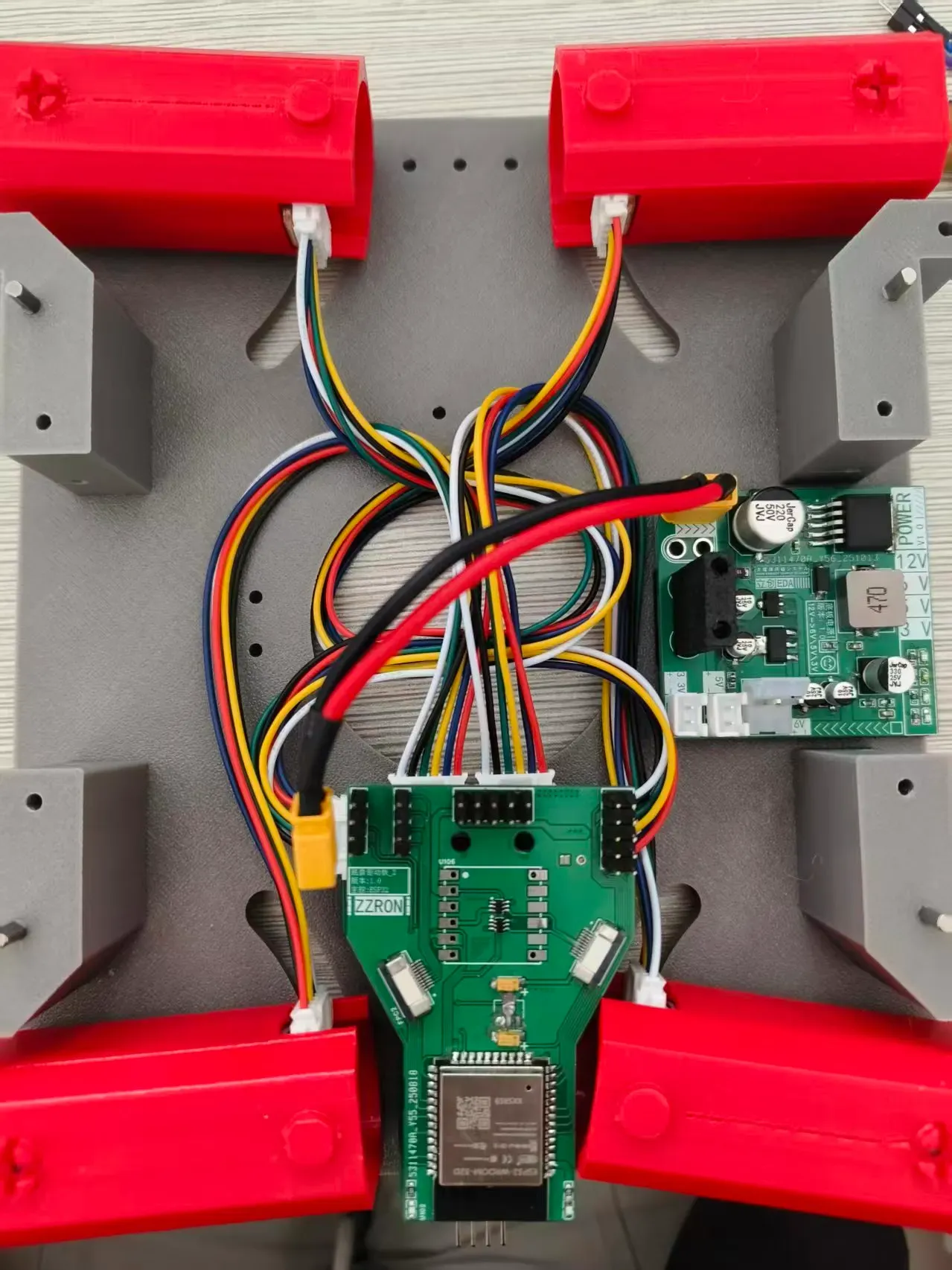
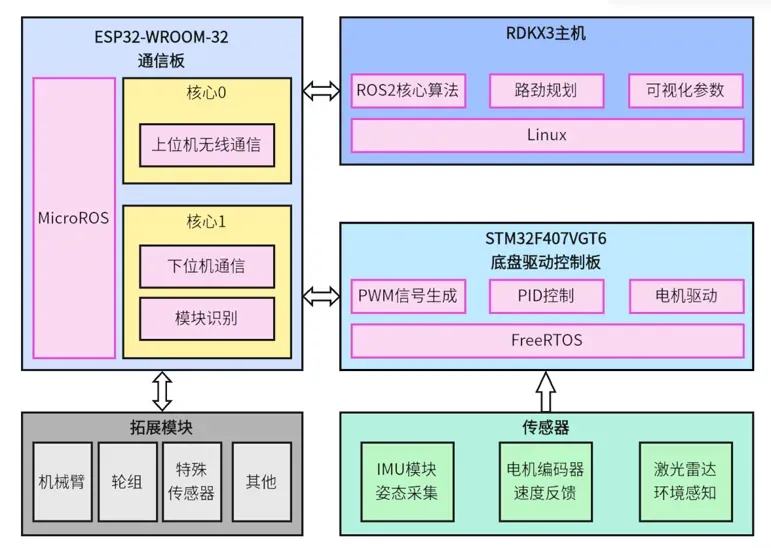
小车车的控制主要依赖小主机给小车车上的esp32发送控制指令,然后esp32通过串口发送给STM32进行电机控制。其系统框架见下图。
文末了,发现自己写的乱七八糟。文章写的比较赶(牛马上班,每天裤裤加班T^T),物料原件购买 、驱动代码以及Ubuntu开发的一些环境配置等问题并未列出,等过些时日,作者会详细的补充文章(包括电路讲解、代码讲解、ROS2开发遇到的问题等)
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









