


小智平衡车
简介
本项目基于 ESP32-S3 平台,结合 自平衡控制算法 与 小智 AI 语音交互系统,打造一款能 进行语音互动 的智能平衡车机器人。
简介:本项目基于 ESP32-S3 平台,结合 自平衡控制算法 与 小智 AI 语音交互系统,打造一款能 进行语音互动 的智能平衡车机器人。开源协议
:GPL 3.0
描述
交流群:1072720904,欢迎复刻👏👏👏

功能展示
👉👉 演示视频 👈👈
-
AI对话
-
稳定直立
-
手柄遥控
项目简介
本项目基于 ESP32-S3 平台,结合 自平衡控制算法 与 小智 AI 语音交互系统,打造一款能 进行AI语音互动 的智能平衡车机器人。
项目功能
🧠 AI 语音交互(小智系统)
基于小智开启AI交互,涵盖小智AI任意功能,还可以通过语音控制机器人,如启停、转向、状态查询等。
🧍♂️ 自平衡控制
通过 BMI270 姿态传感器与 MT6701 编码器,实现实时姿态检测与电机闭环控制,使机器人能够在动态环境中保持直立平衡。
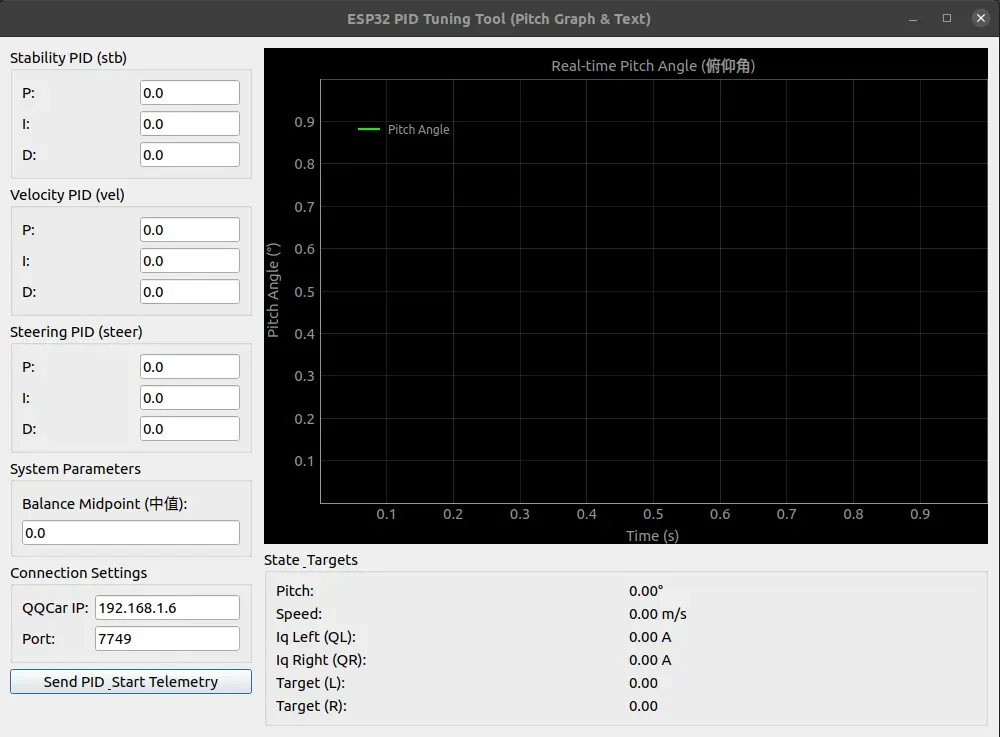
控制算法基于 PID + SimpleFOC 框架,支持角度与速度双环调节。
🎮 扩展与控制
可通过遥控器实时控制前进、转向、停止等动作。
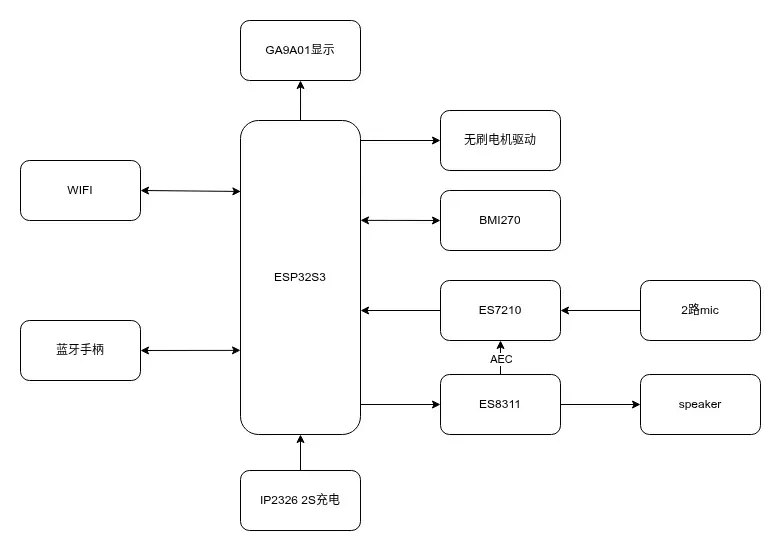
架构说明
-
主控单元:ESP32-S3
采用双核 Xtensa LX7 处理器,主频 240MHz,内置 AI 指令集,负责姿态控制、语音处理与通信管理。 -
电机驱动系统
采用 MOS 管全桥驱动无刷直流电机(BLDC),通过 SimpleFOC 控制算法 实现高精度PWM调速与闭环控制。
系统支持 在线电流检测,可用于电流环控制与过流保护。 -
姿态传感器:BMI270
提供 6 轴加速度与陀螺仪数据,用于实时检测车体倾角与角速度,是平衡控制算法的核心输入。 -
音频系统:ES7210 + ES8311
ES7210(ADC):负责双麦克风信号采集,提供高信噪比语音输入;
ES8311(DAC):驱动扬声器,实现语音播放与提示输出;
结合 2 路麦克风阵列 + AEC 电路,实现声学回声消除,实现交互过程中的实时打断。 -
电源与充电系统:IP2326
集成锂电池充电与电源管理,支持 USB 供电与电池充电切换,1.2A大电流充电。 -
显示
使用GA9A01模组进行显示 -
BLE
使用蓝牙遥控器进行遥控
个人使用的是盖世小鸡启明星1代,二代测试不能使用
软件开源代码
编译下载
-
使用idf环境进行编译
get_idf
idf.py set-target esp32s3
idf.py build -
下载
idf.py flash -b 1152000
硬件设计时候考虑type-c正反插下载,但是应该是受充电ic ip2326影响,所以使用ttyACM0下载会有些问题。如果不能下载,反插一下type-c即可。 -
enjoy
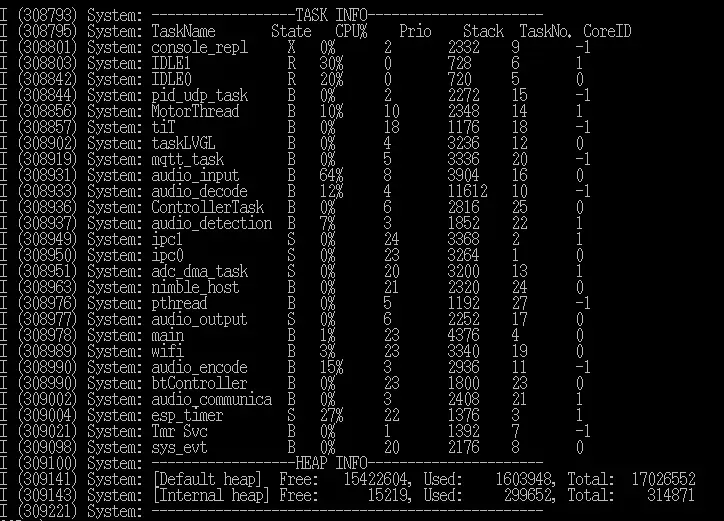
调试
FOC的力矩控制以及audio,网络的交互,这些非常消耗资源,需要合理的设计和资源安排才能在一块esp32芯片上实现直立和小智AI。
wifi在线调试
物料
考虑复刻成本,所有物料都是常规料,在某宝上都可以方便的采购到。
- 电机用的是大疆的2312A,价格便宜。
- 支持ESP32-S3R16V和ESP32-S3R8,flash都是16MB。
- MOS管用的是CSD18540,封装一致的应该都可以使用。
- 最小封装也是0603,焊接容易。有QFN封装芯片,需要热风枪或者加热台进行焊接。
装配
材料清单
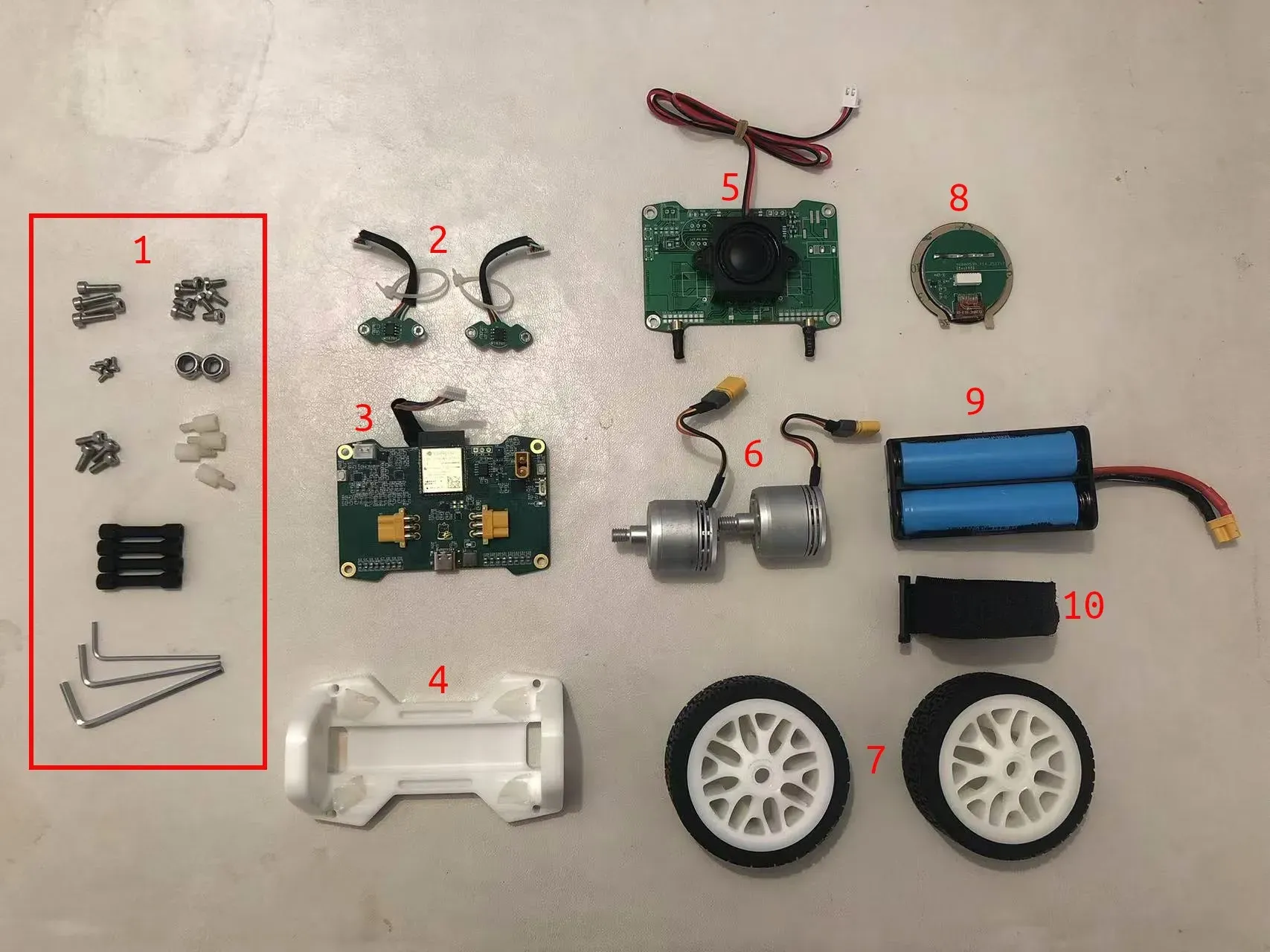
- 螺丝螺母
M3x6, M3x8,M3x12,M2x4
内六角为M1.5,M2,M2.5 - mt6701磁编码器
- 核心主板
- 主支架
- 空板,只为固定使用
- 2312A电机两个
- 轮胎两个
- GA9A01屏幕
- 电池
- 魔术贴
安装
-
安装磁铁
使用螺丝胶将5mm径向磁铁固定在2312a上

-
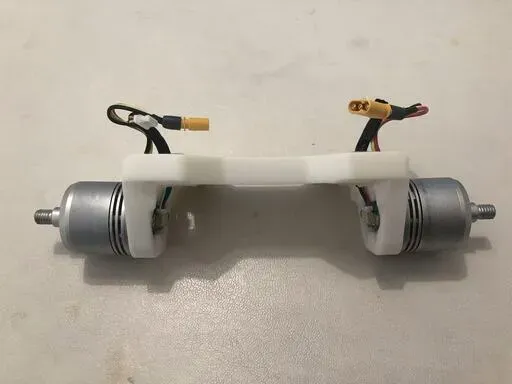
安装电机和磁编码器
用的是网友的2312a支架,因为设计将电池装在底下,所以标红的4个角需要切割打磨。
暂时没有时间重新设计,有时间的同学帮忙改进下模型
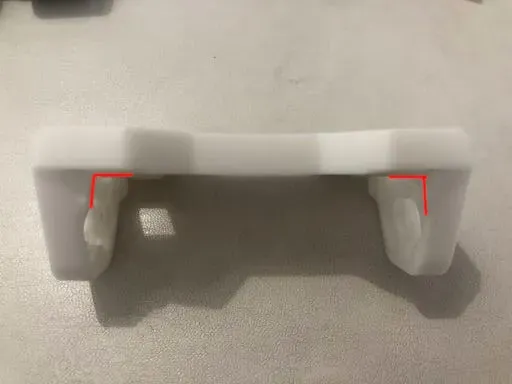
将电机和磁编码器进行安装,使用M3x6和M2x4螺丝

安装完毕
-
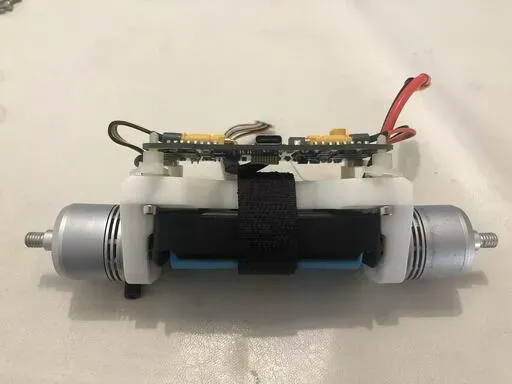
安装主板和电池

-
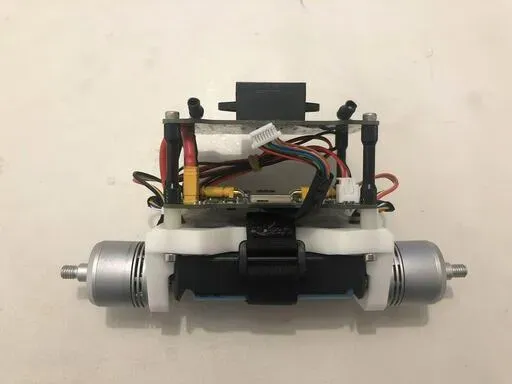
安装上顶和喇叭
用双面胶等材质将喇叭和空板固定,再使用M3x8将空板固定

-
安装轮子
需要使用防松螺母固定,所以需要将边上切割掉一些。
暂时没有时间重新设计,有时间的同学帮忙改进下模型


-
整机效果

参考项目,感谢开源
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









