

FPV穿越机飞控
简介
FPV穿越机飞控,支持BetaFlight、INAV、PX4、Ardupilot开源飞控,目前已成功移植了PX4,支持定高、定点、自稳、手动、特技、航迹任务飞行模式
简介:FPV穿越机飞控,支持BetaFlight、INAV、PX4、Ardupilot开源飞控,目前已成功移植了PX4,支持定高、定点、自稳、手动、特技、航迹任务飞行模式开源协议
:GPL 3.0
描述
视频链接:
[B站视频--功能演示及介绍]
https://www.bilibili.com/video/BV1bdxrzjEgF/
https://www.bilibili.com/video/BV1tdxrzjEdF/
项目简介
本项目是基于STM32H743单片机的FPV穿越机飞控,支持BetaFlight、INAV、PX4、Ardupilot开源飞控,目前已成功移植了PX4,支持定高、定点、自稳、手动、特技、航迹任务飞行模式
项目功能
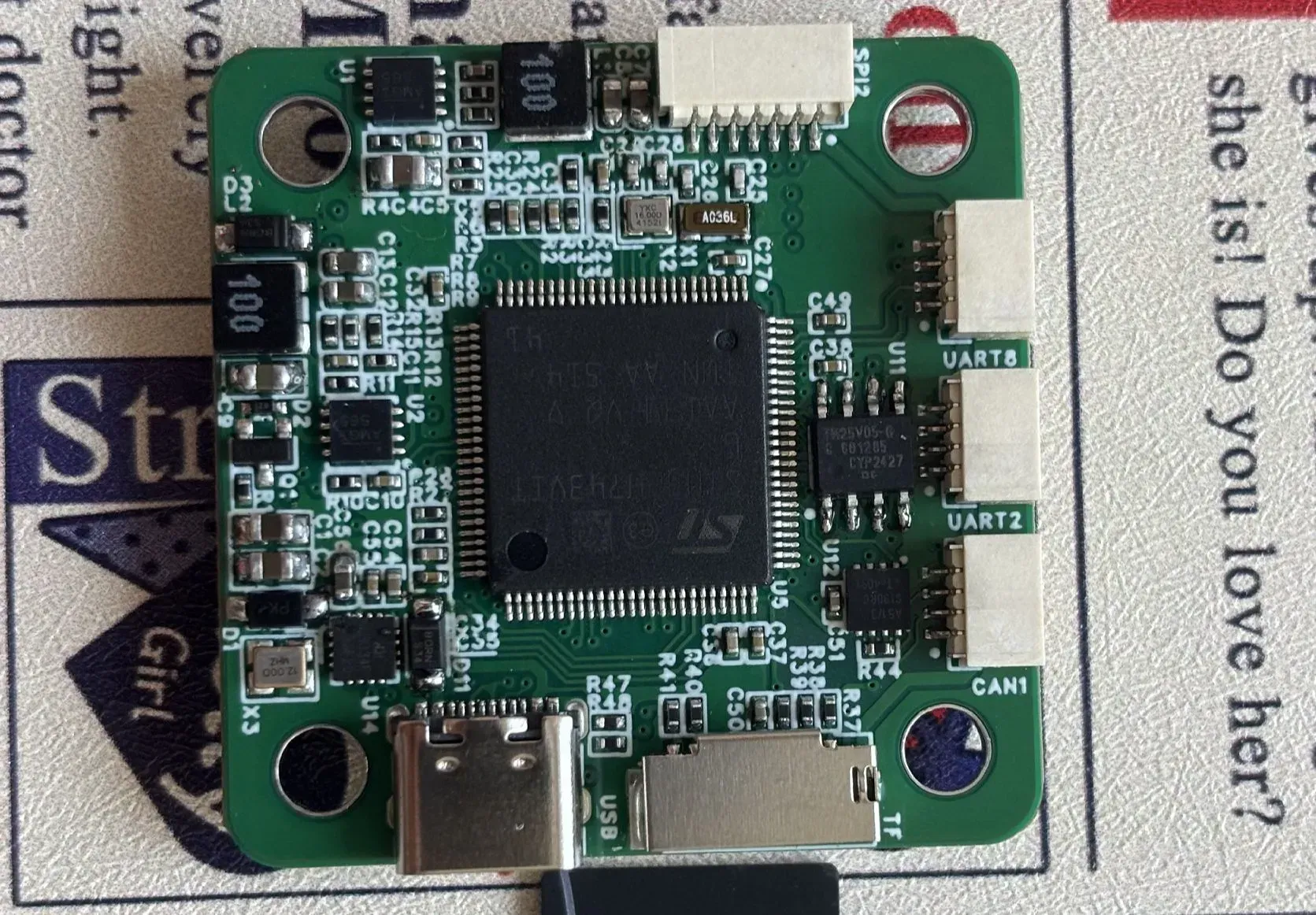
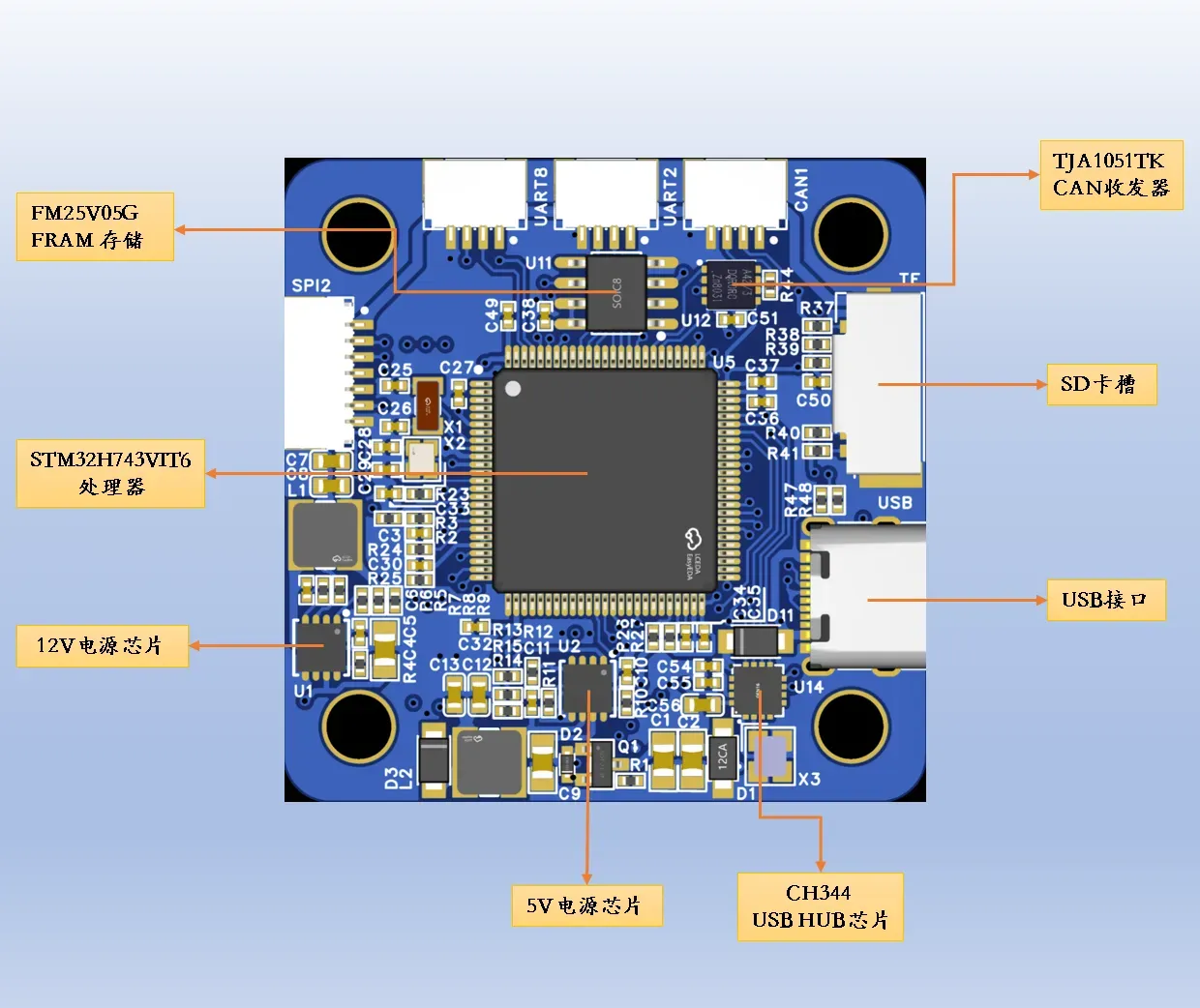
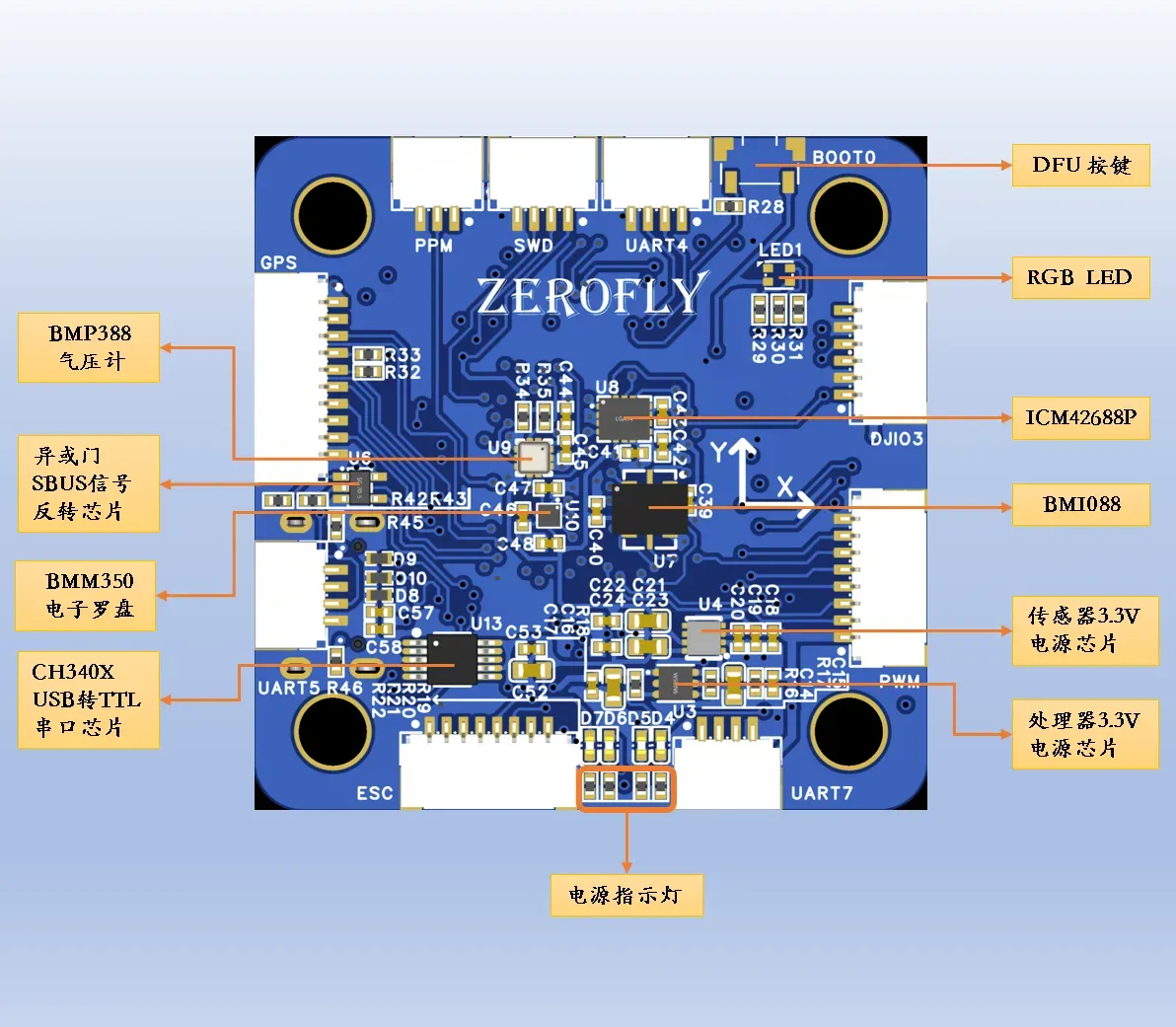
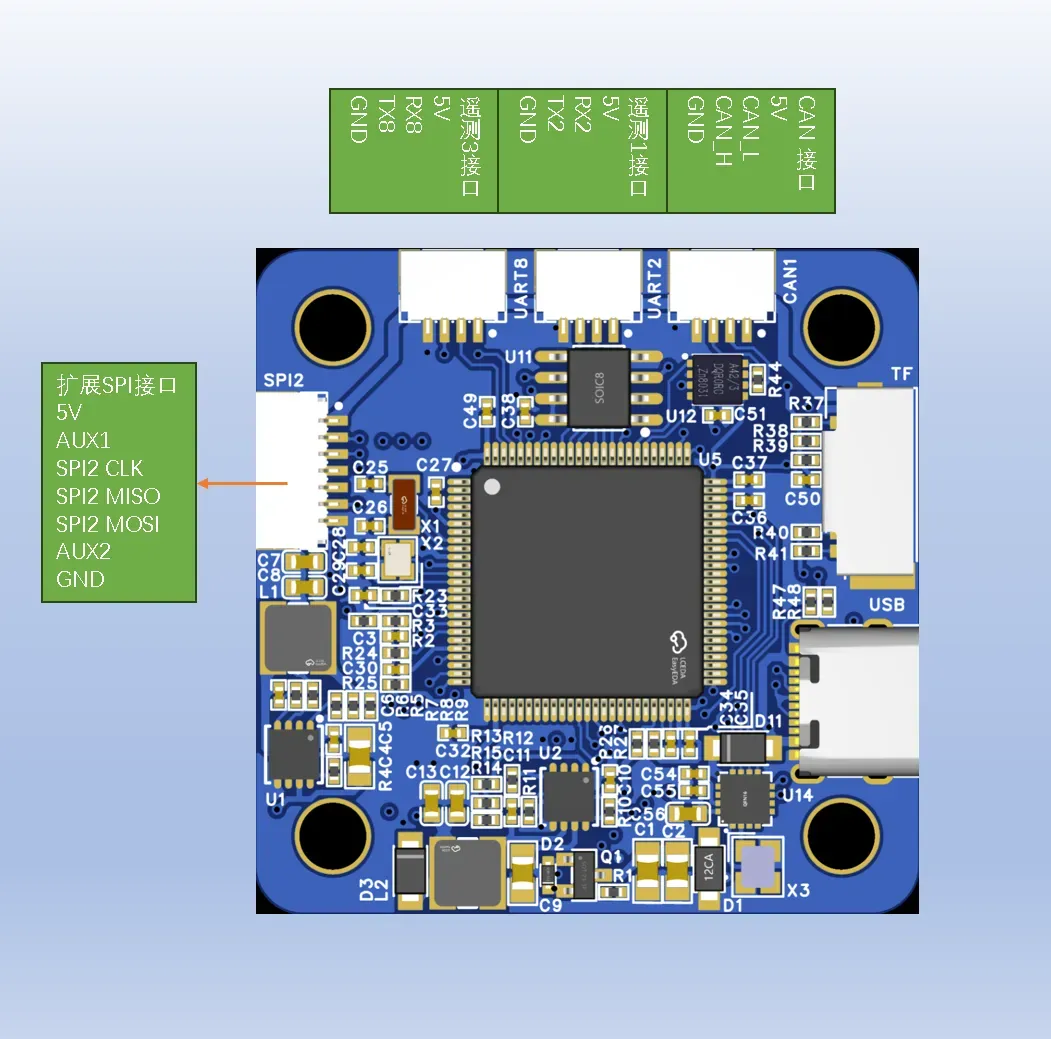
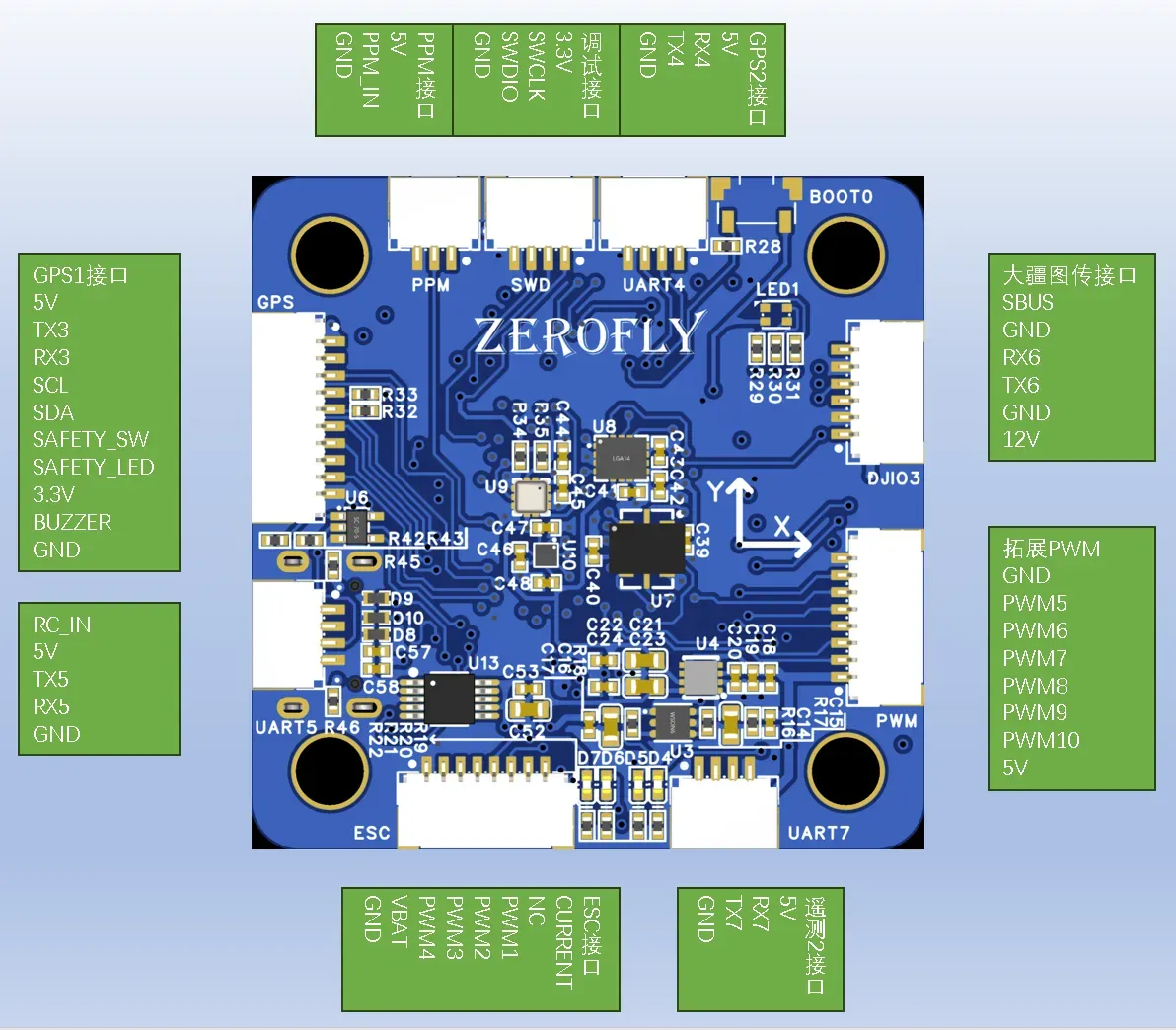
本设计是基于STM32H743单片机的FPV穿越机飞控,支持BetaFlight、INAV、PX4、Ardupilot开源飞控;板载双IMU(ICM42688-P和BMI088)、BMP388气压计、BMM350电子罗盘、CH344F USB HUB芯片、CH340X串口转USB芯片、TJA1051T CAN收发芯片、FM25V05G铁电存储器;对外引出8路串口(1路通过USB引出)、1路I2C、1路SPI、1路CAN、1个type-C口、1个TF卡接口、10路PWM输出;对外输出5V/3A和12V/3A电源,支持DJIO3/O4以及其他主流数字图传。支持PPM、SBUS、ELRS等主流遥控协议。
描述
目前已成功移植了PX4,支持定高、定点、自稳、手动、特技、航迹任务飞行模式,为什么首先移植了PX4?因为PX4的功能已经完全覆盖了BetaFlight、INAV,同时开发难度又小于Ardupilot,相当于你不仅拥有了一台穿越机还同时拥有了航拍机,PX4支持多旋翼、固定翼、垂直起降、无人车、无人船等无人驾驶系统。
参数
MCU:STM32H743VIT6
IMU:ICM42688-P、BMI088
气压计:BMP388
罗盘:BMM350
FRAM:FM25V01G\FM25V02G\FM25V05G
CAN收发器:TJA1051TK/3
DCDC电源:MP9943GQ-Z
3.3V线性线性稳压器:MIC5330-SSYML(MCU供电)、LP5912Q3.3DRVRQ1(传感器供电)
USB HUB芯片:CH334P
USB转串口芯片:CH340X
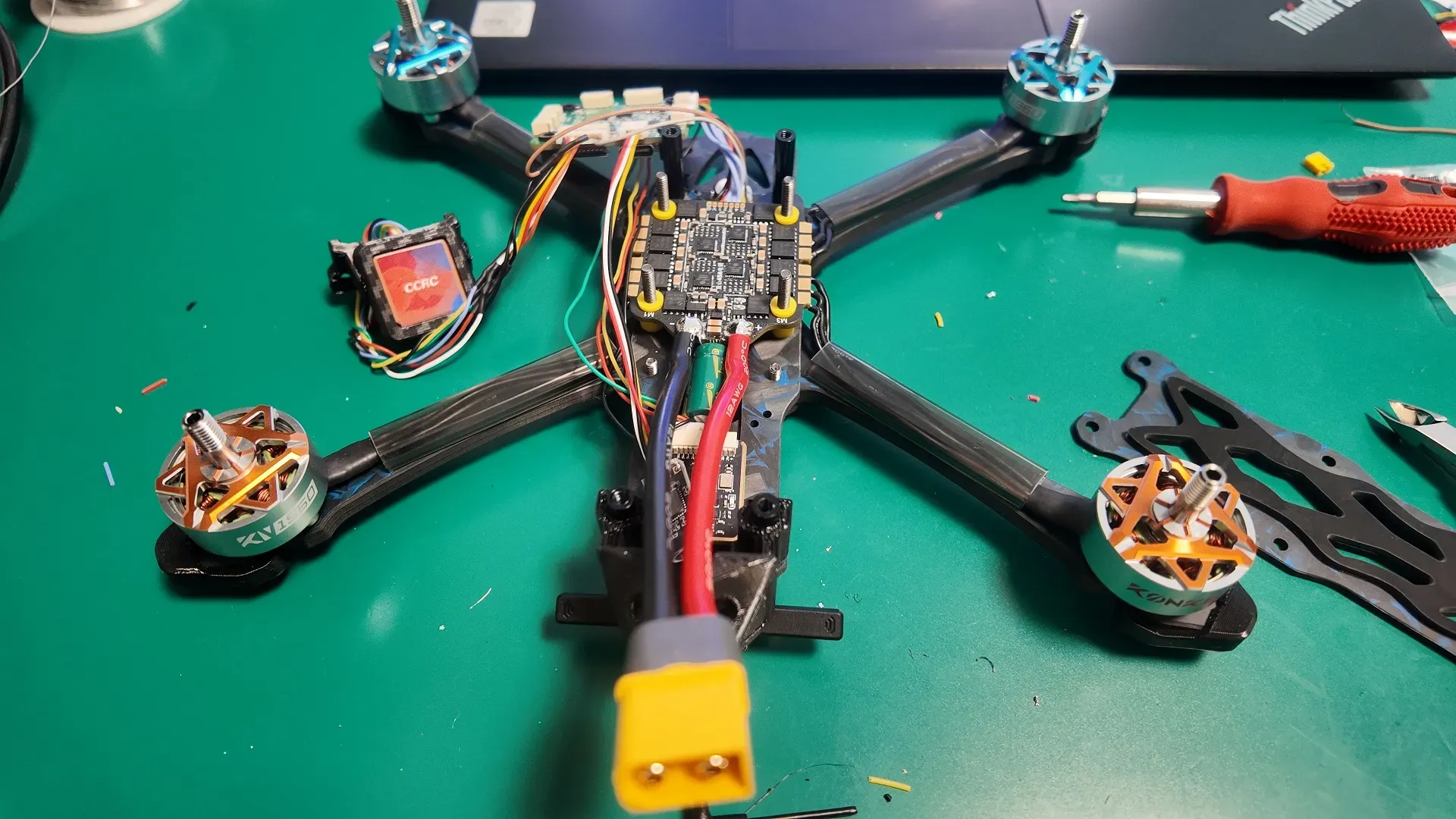
实物图
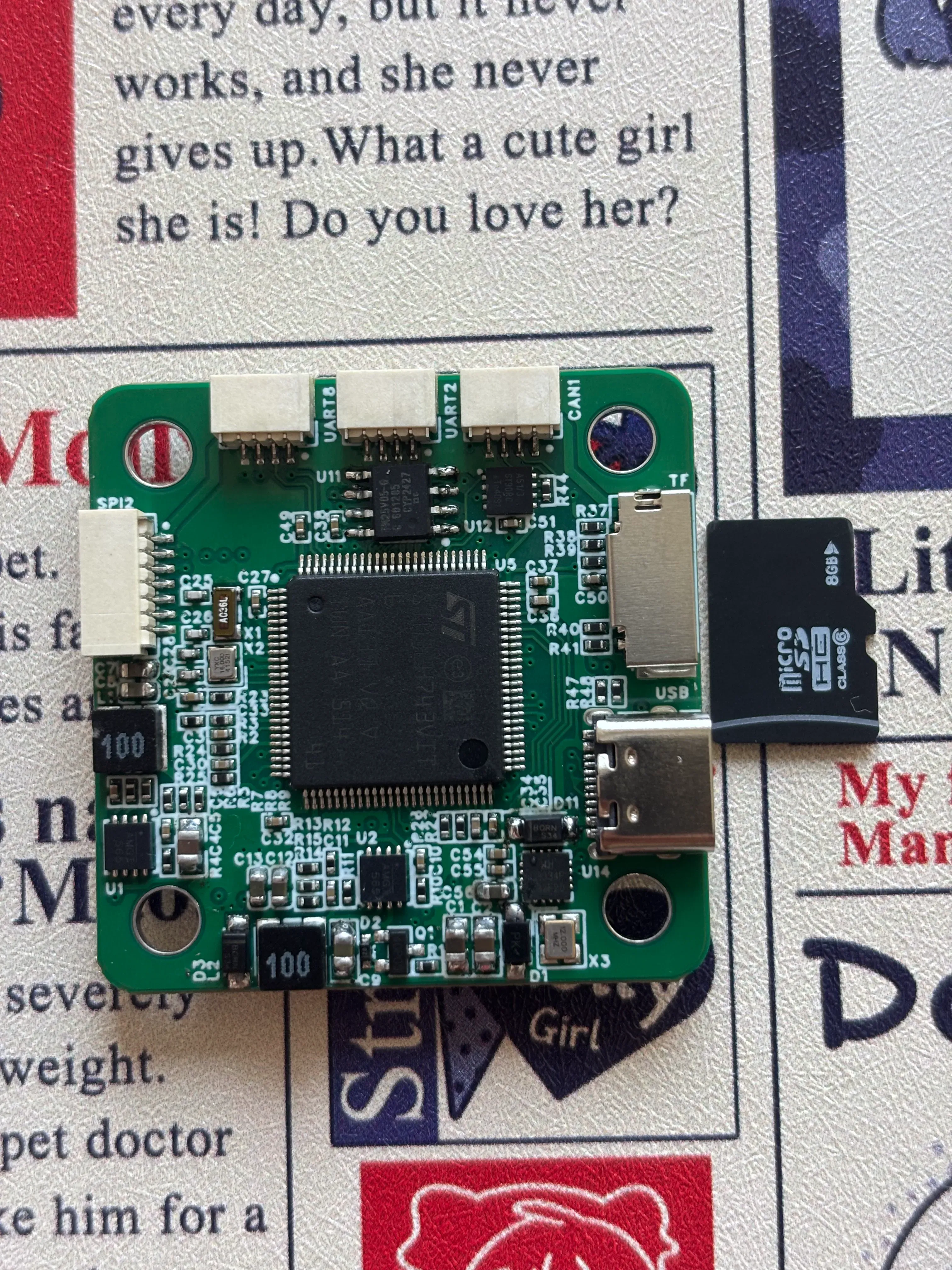

板载资源
接口
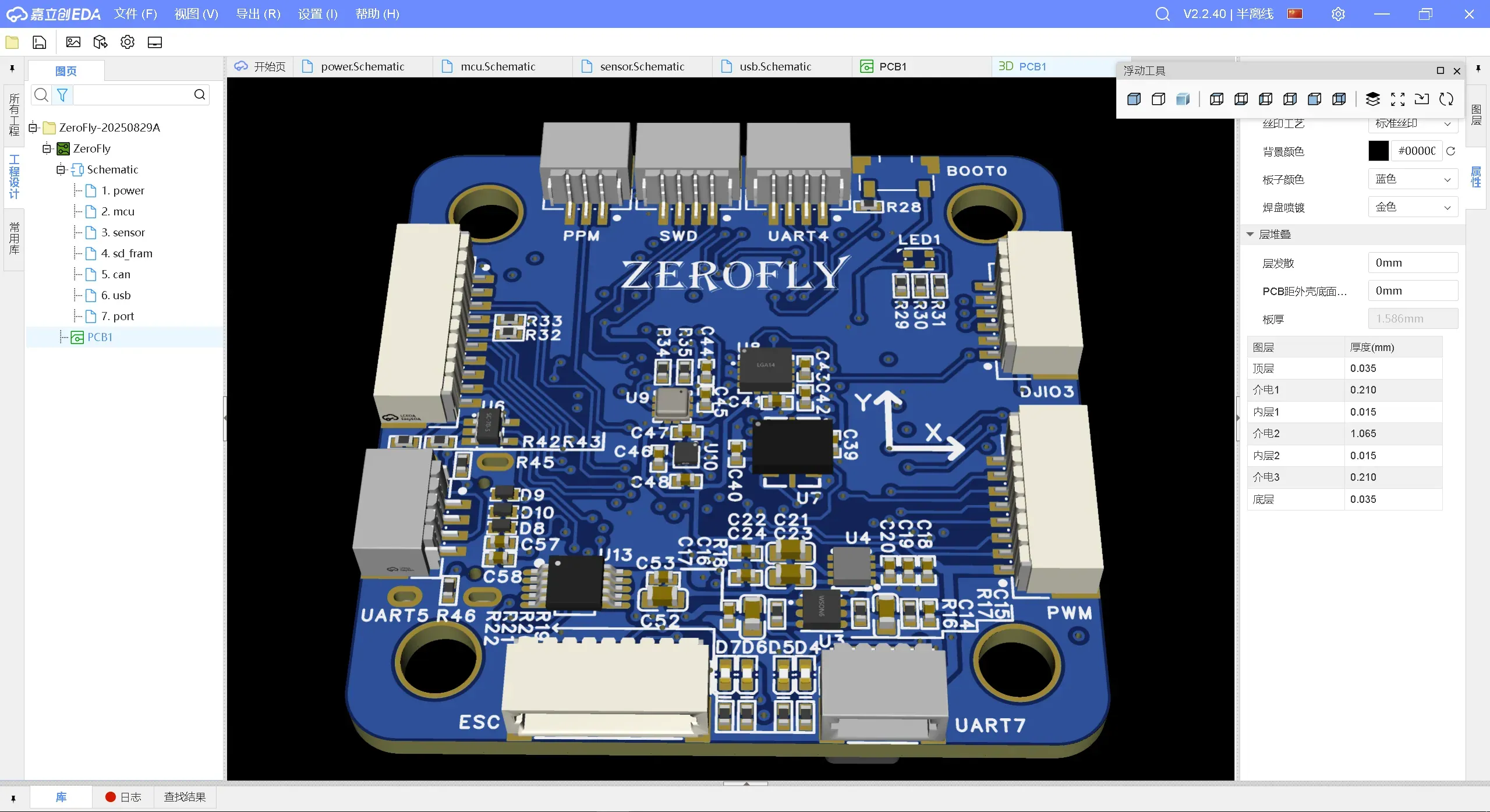
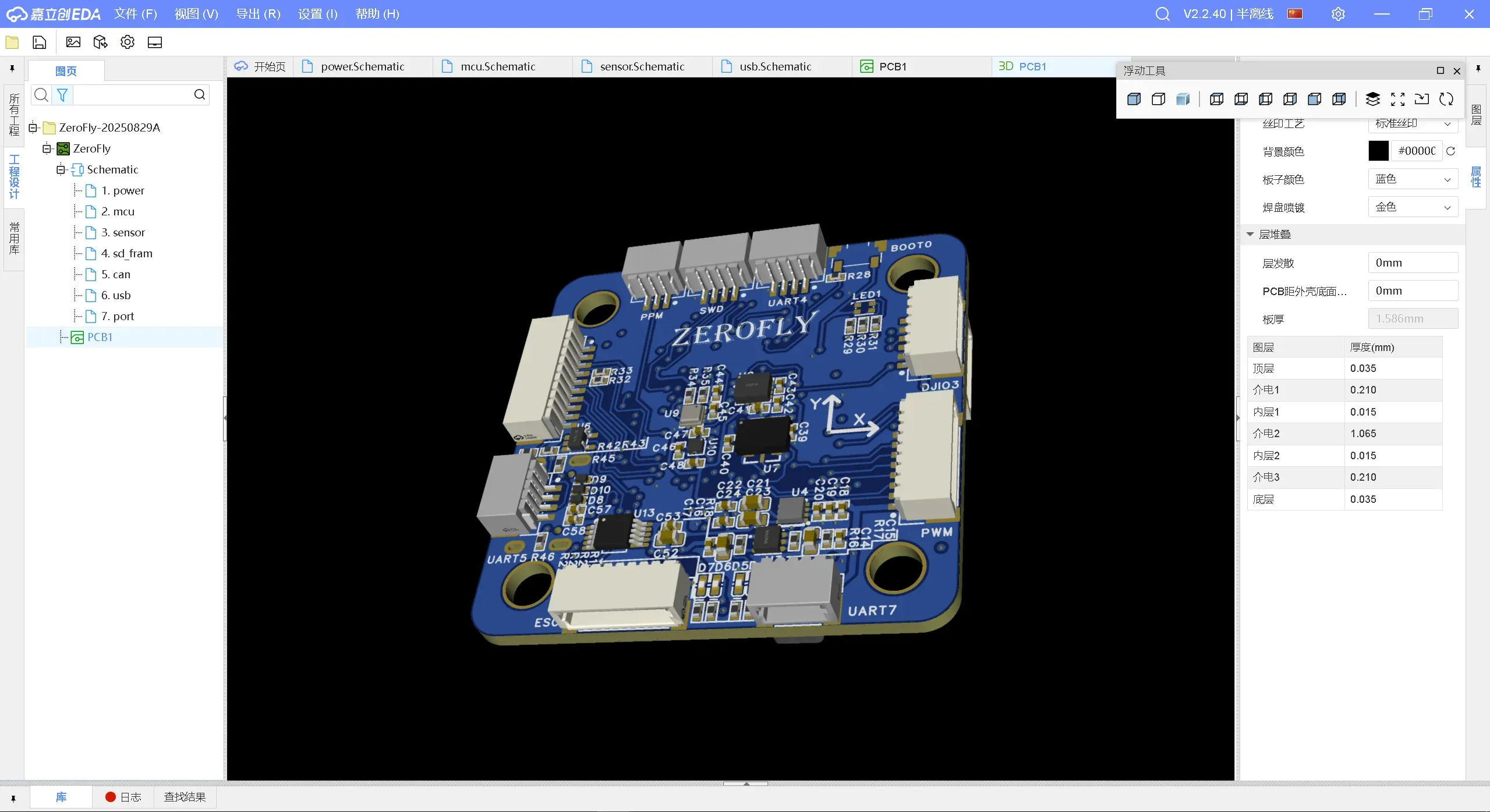
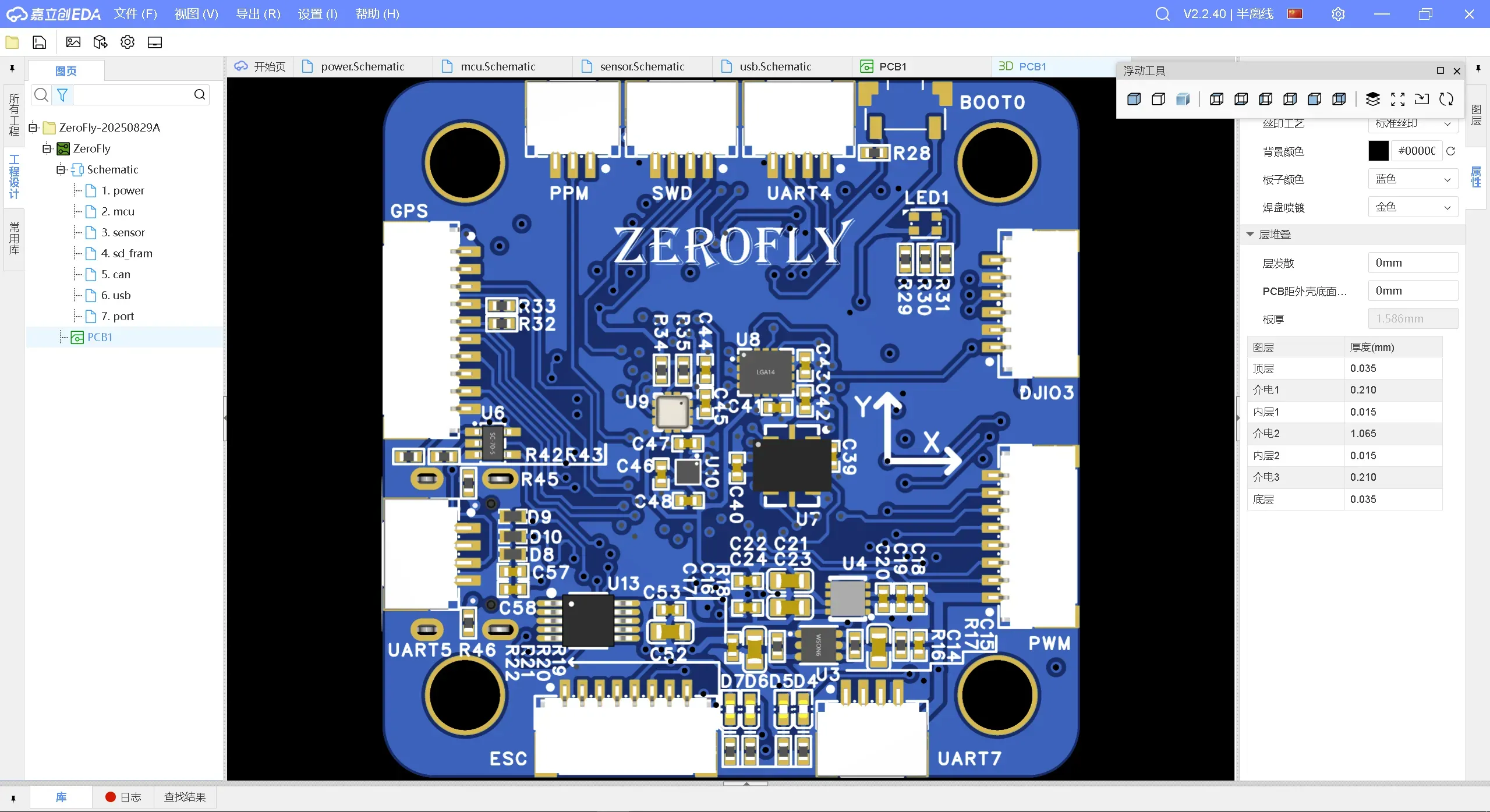
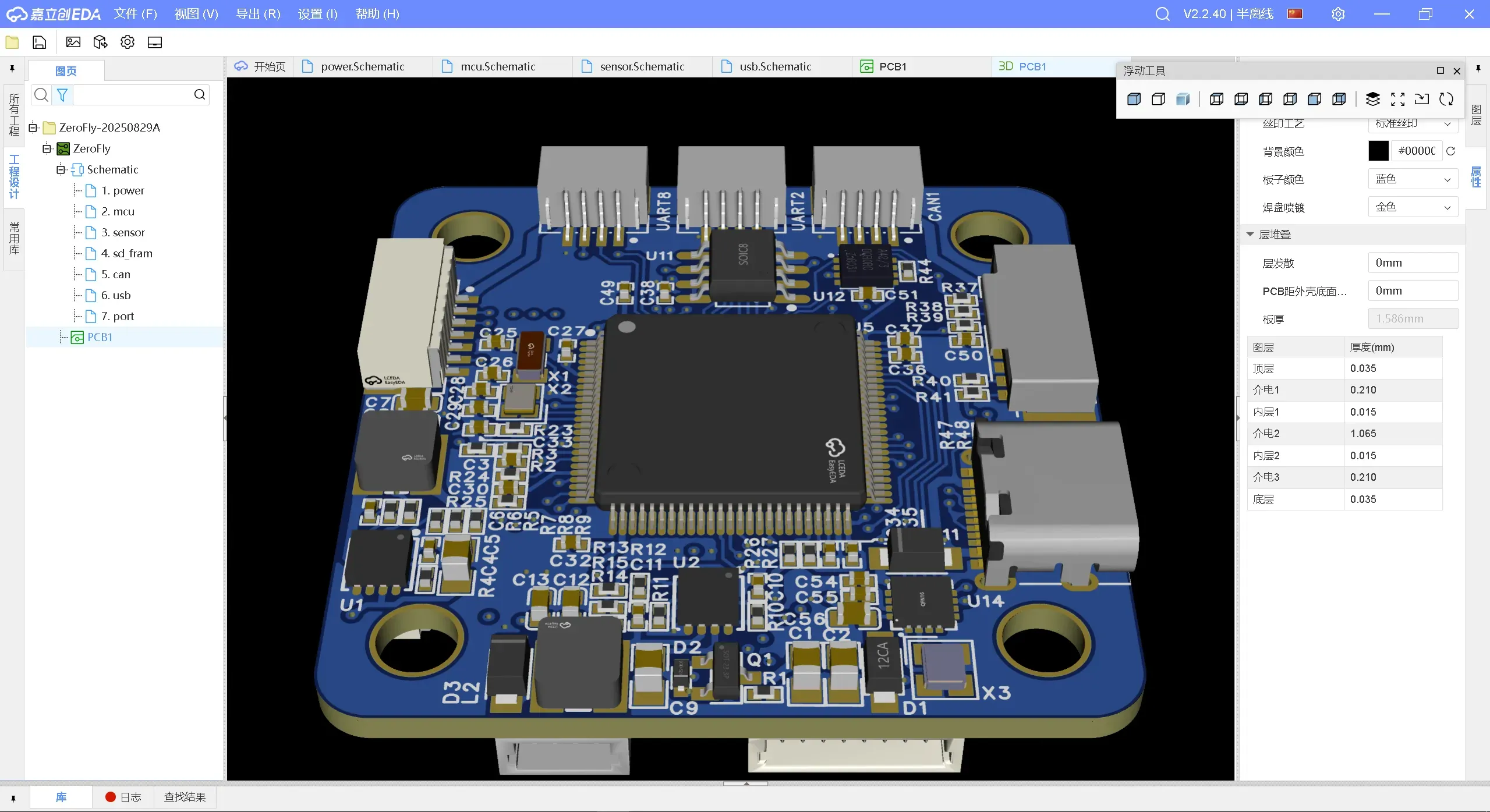
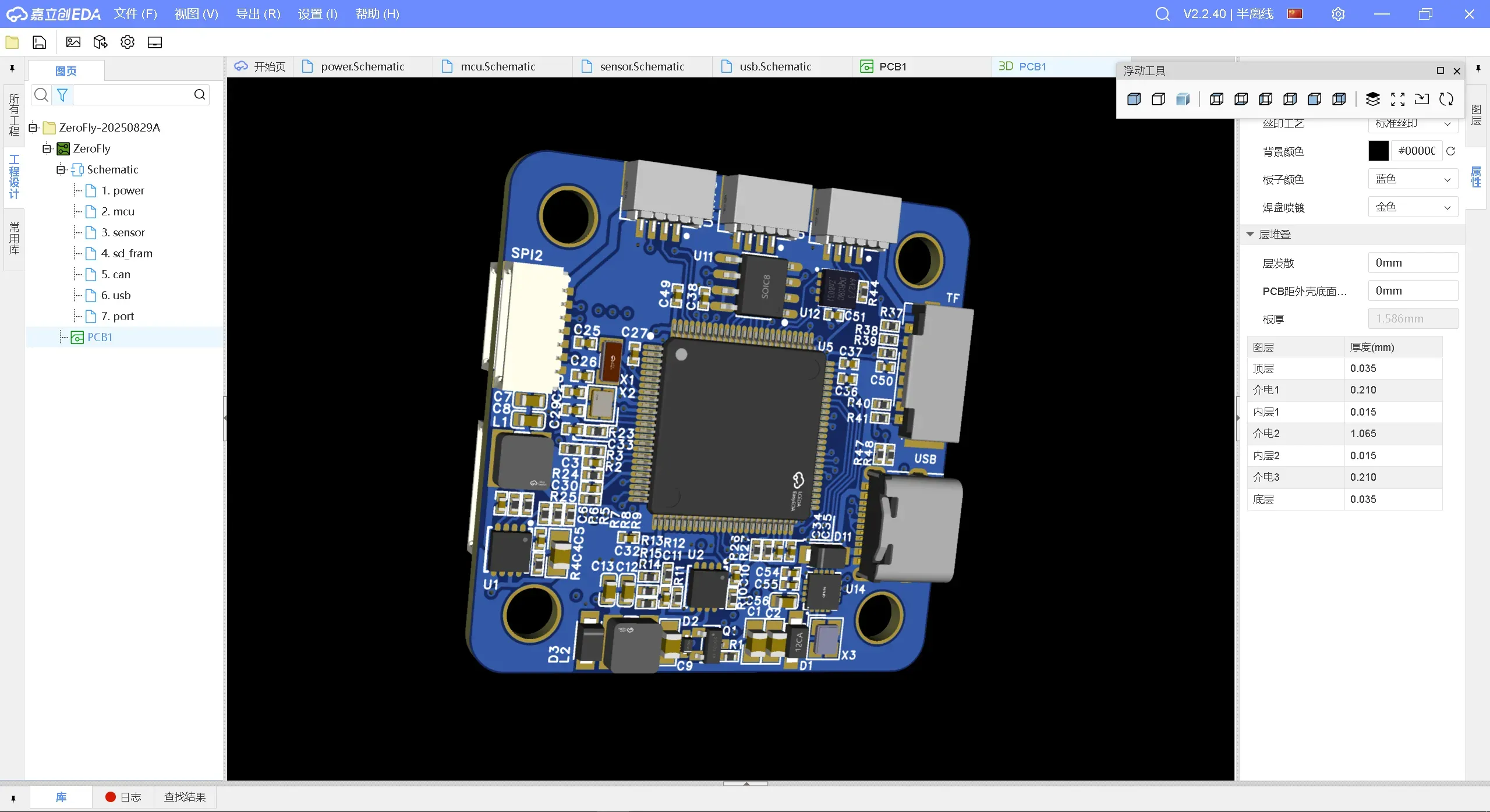
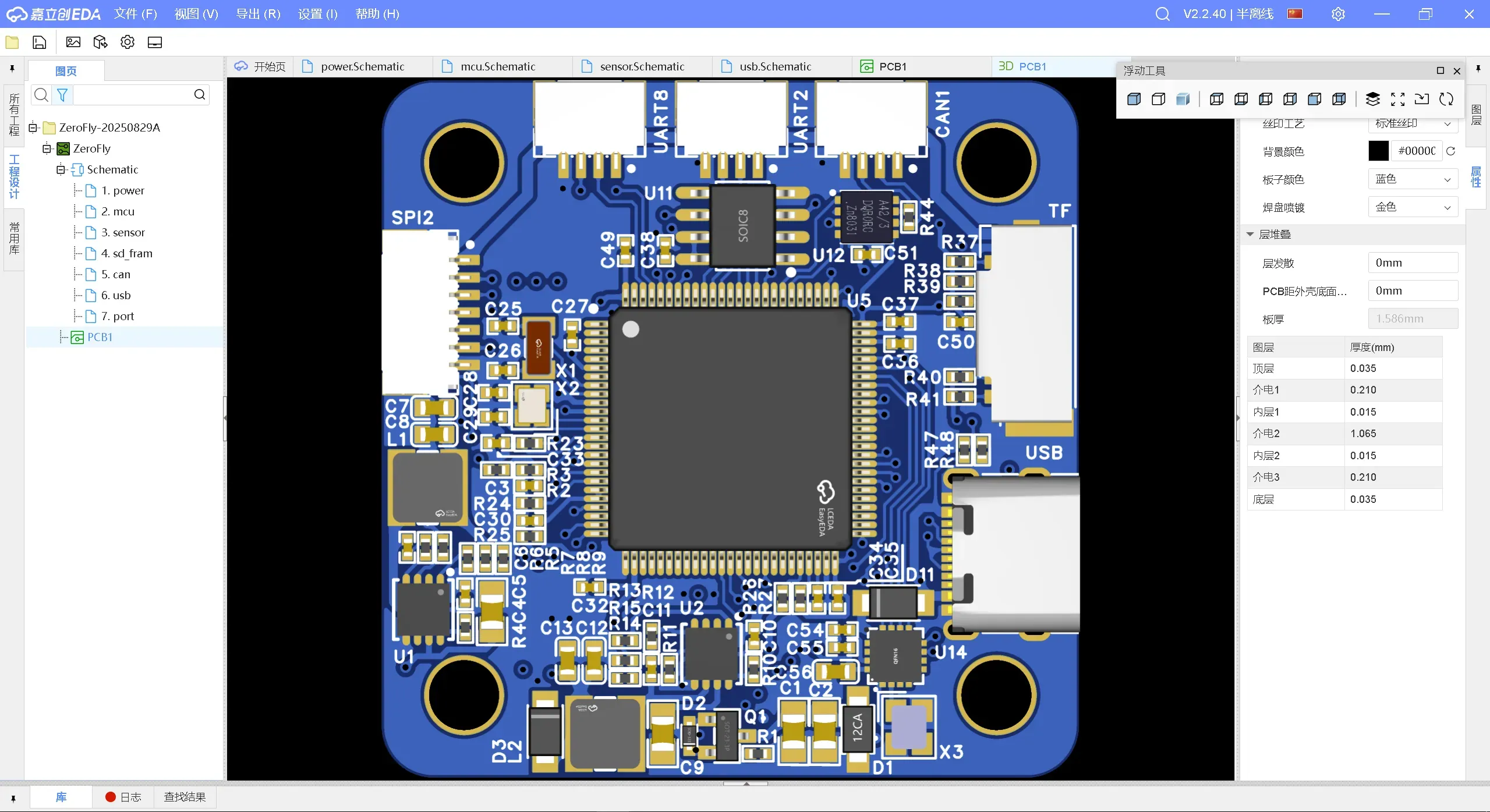
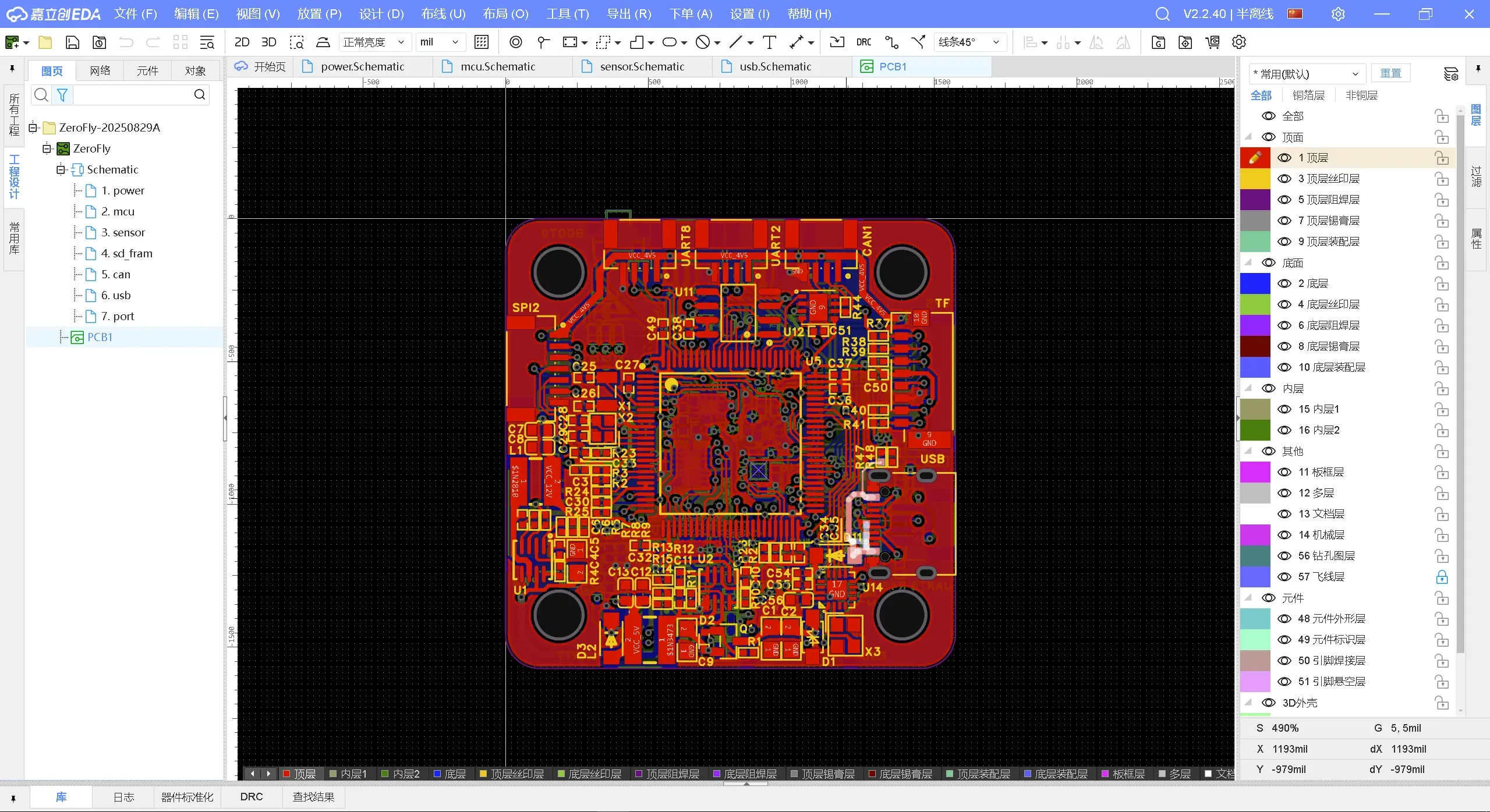
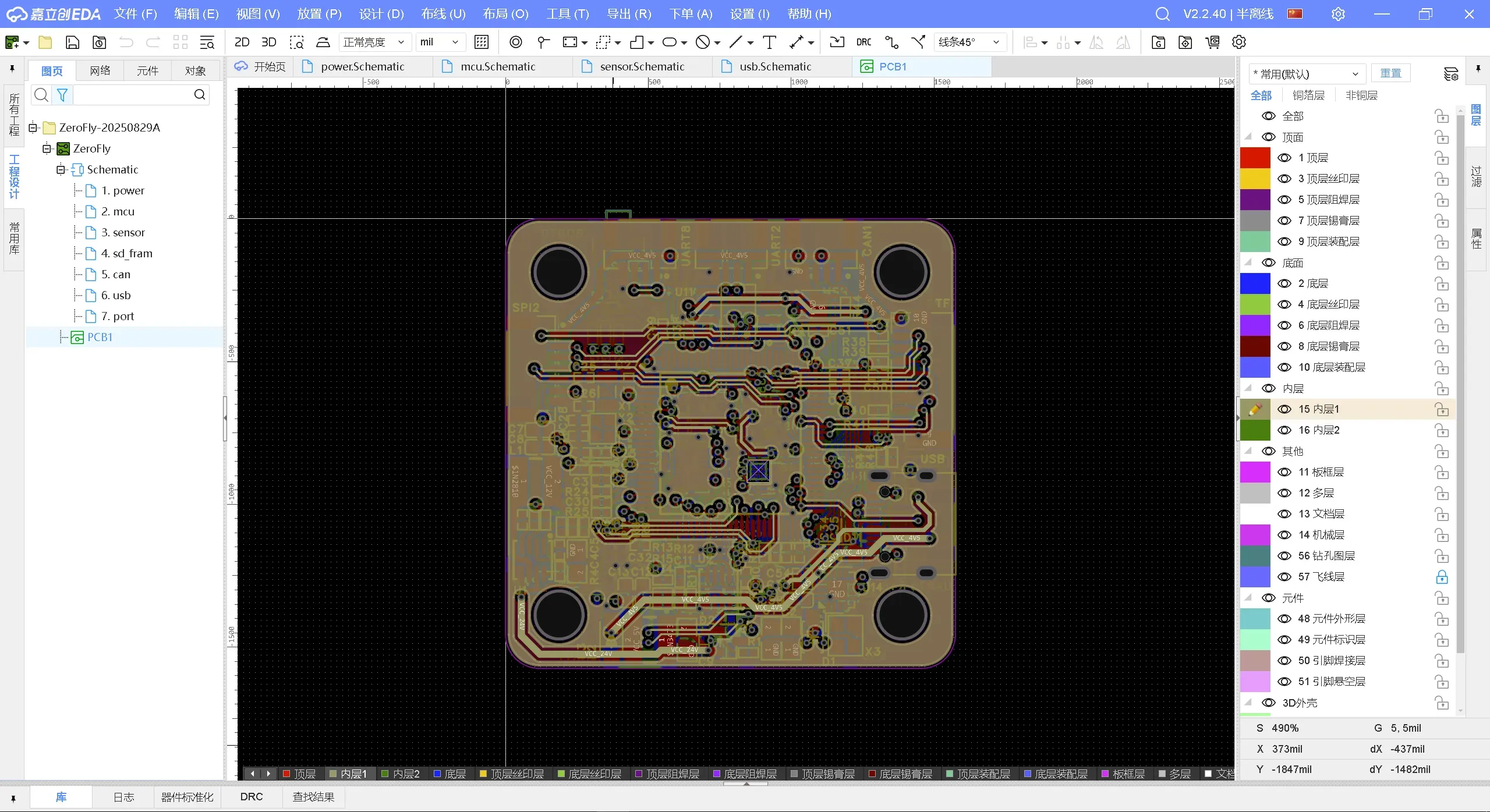
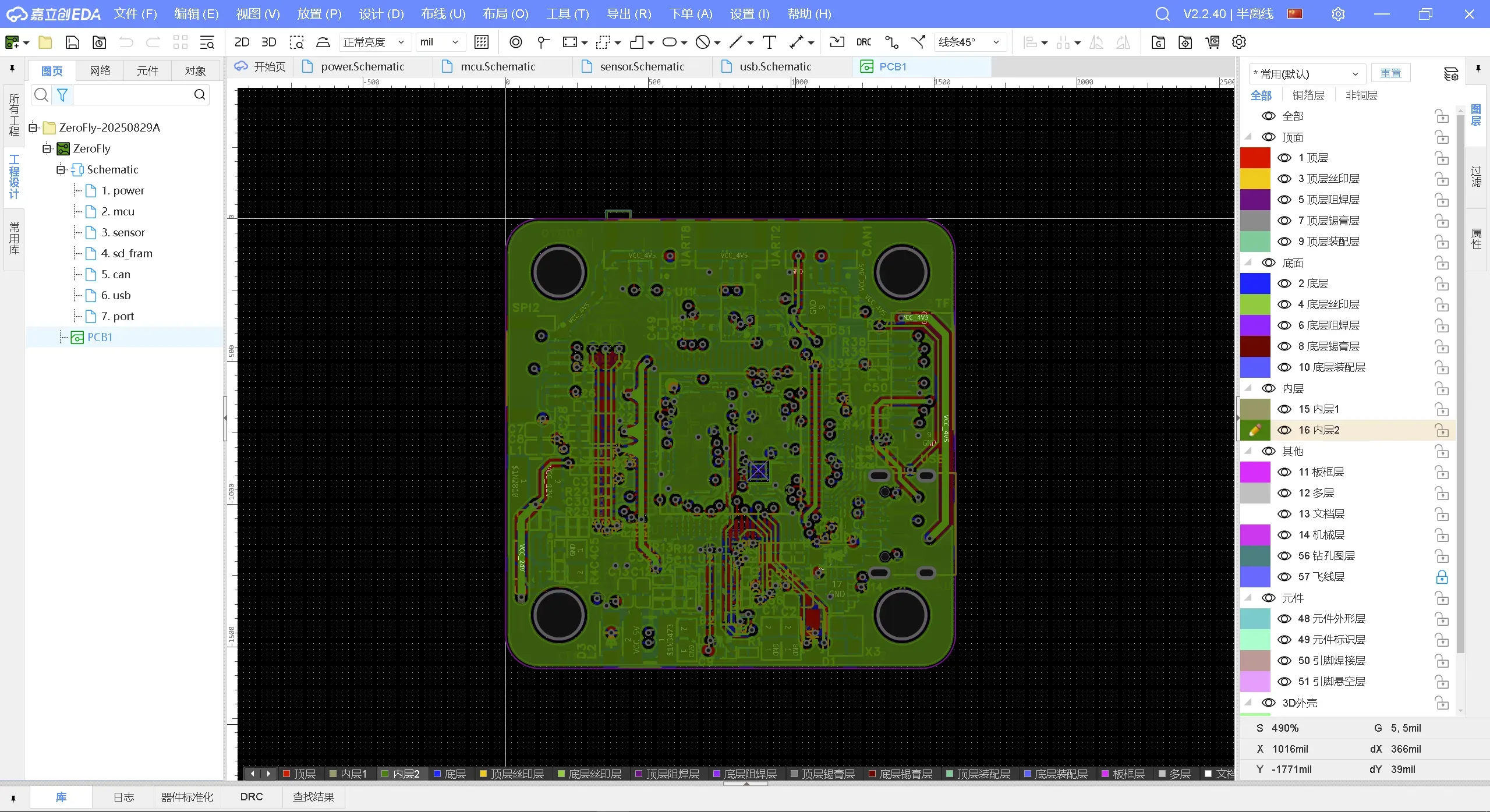
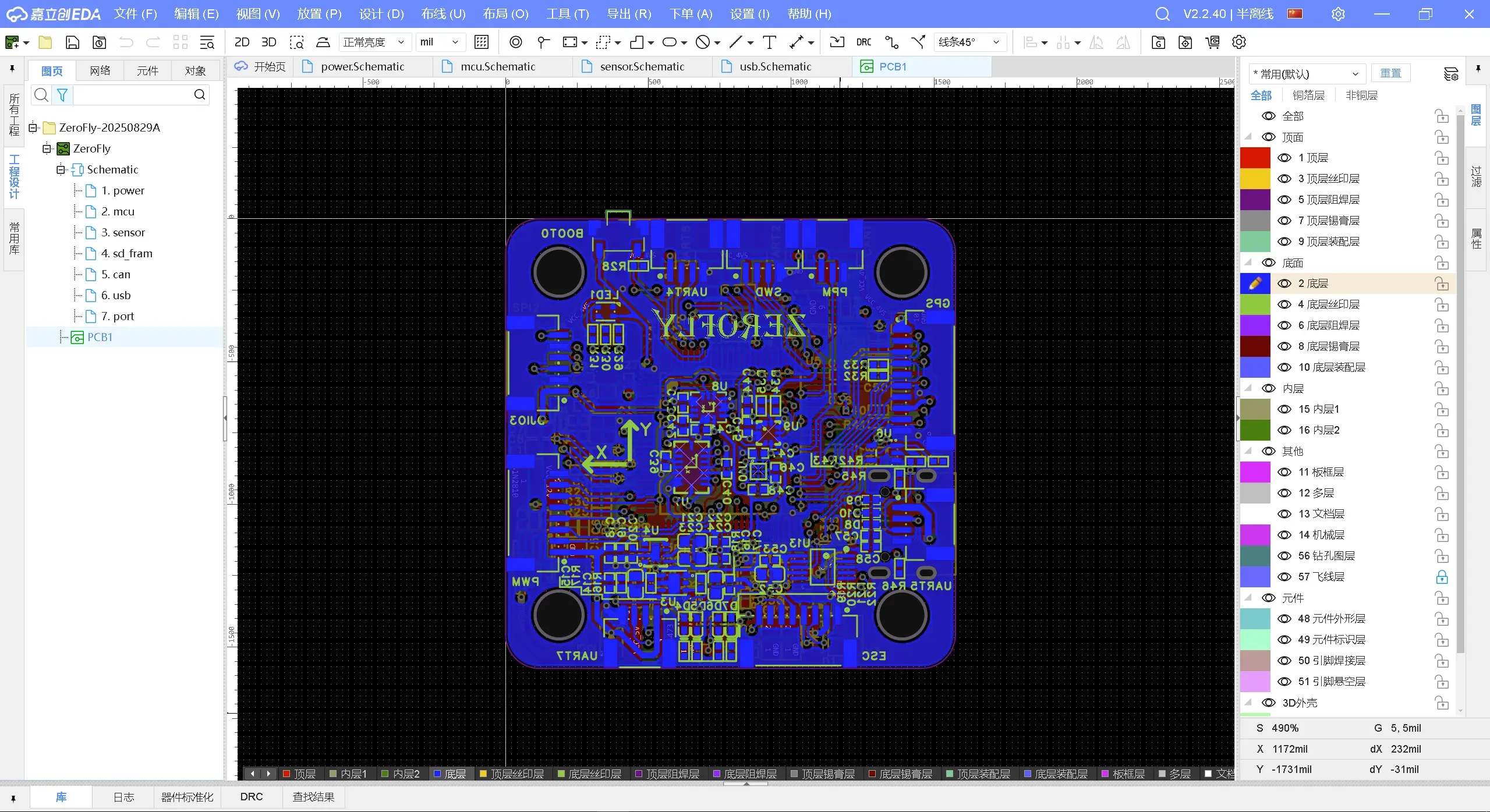
PCB图
组装





设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









