



ottoRobot
简介
otto 机器人是一个开源的机器人平台,具有多种动作能力和互动功能。本项目基于 ESP32 /Tuya T5实现了 otto 机器人的控制系统,并接入小智AI/Tuya AI
简介:otto 机器人是一个开源的机器人平台,具有多种动作能力和互动功能。本项目基于 ESP32 /Tuya T5实现了 otto 机器人的控制系统,并接入小智AI/Tuya AI开源协议
:CC BY-NC-SA 4.0
(未经作者授权,禁止转载)描述
ottoRobot



版权声明
© 小鹏, 2025
本作品采用 署名-非商业性使用-相同方式共享 4.0 国际 (CC BY-NC-SA 4.0) 许可协议发布。
您可以自由地:
- 共享 — 在任何媒介以任何形式复制、传播本作品
- 演绎 — 修改、转换或基于本作品进行创作
但须遵守以下条件:
- 署名 — 您必须给予适当的署名,提供许可协议链接,并说明是否做出更改。
- 非商业性使用 — 您不得将本作品用于商业目的。
- 相同方式共享 — 如果您修改、转换或基于本作品创作,必须基于相同许可协议发布。
介绍
otto 机器人是一个开源的人形机器人平台,具有多种动作能力和互动功能。
本项目有ESP32和涂鸦T5两个版本,可分别接入小智AI与涂鸦生态(AI大模型对话,一键接入智能家居控制)
源码
功能概述
- otto 机器人具有丰富的动作能力,包括行走、转向、跳跃、摇摆等多种舞蹈动作。
- AI大模型语音对话,控制机器人动作与智能家居。
版本介绍
- ESP32S3版本:ottoRobotV1.1和新手友好(模块直插)。
- 涂鸦T5版本:ottoRobot_tuya(基于涂鸦T5模组,一键接入涂鸦生态,终生免费token)。
动作
| 动作类型 | 编号 | 描述 | 参数 |
|---|---|---|---|
| Walk | 1 | 行走 | steps: 步数 speed: 速度 (越小越快500-3000) direction: 方向 (1=前进, -1=后退) amount: 手臂摆动幅度 (0=不摆动, 0-170) |
| Turn | 2 | 转向 | steps: 步数 speed: 速度 direction: 方向 (1=左转, -1=右转) amount: 手臂摆动幅度 (0=不摆动, 0-170) |
| Jump | 3 | 跳跃 | steps: 步数 speed: 速度 |
| Swing | 4 | 摇摆 | steps: 步数 speed: 速度 amount: 幅度 (10-50) |
| Moonwalk | 5 | 太空步 | steps: 步数 speed: 速度 amount: 幅度 (15-40) direction: 方向 (1=左, -1=右) |
| Bend | 6 | 弯曲 | steps: 步数 speed: 速度 direction: 方向 (1=左, -1=右) |
| ShakeLeg | 7 | 抖腿 | steps: 步数 speed: 速度 direction: 方向 (1=左腿, -1=右腿) |
| UpDown | 8 | 上下运动 | steps: 步数 speed: 速度 amount: 幅度 (10-50) |
| TiptoeSwing | 9 | 脚尖摇摆 | steps: 步数 speed: 速度 amount: 幅度 (10-50) |
| Jitter | 10 | 抖动 | steps: 步数 speed: 速度 amount: 幅度 (5-25) |
| AscendingTurn | 11 | 上升转弯 | steps: 步数 speed: 速度 amount: 幅度 (5-15) |
| Crusaito | 12 | 十字步/混合步态 | steps: 步数 speed: 速度 amount: 幅度 (20-50) direction: 方向 (1=左, -1=右) |
| Flapping | 13 | 拍打动作 | steps: 步数 speed: 速度 amount: 幅度 (10-30) direction: 方向 (1=前, -1=后) |
| HandsUp | 14 | 举手 | speed: 速度 direction: 方向 (1=左手, -1=右手, 0=双手) |
| HandsDown | 15 | 放手 | speed: 速度 direction: 方向 (1=左手, -1=右手, 0=双手) |
| HandWave | 16 | 挥手 | speed: 速度 direction: 方向 (1=左手, -1=右手, 0=双手) |
参数说明
- steps: 动作执行的步数/次数,数值越大动作持续时间越长
- speed: 动作执行速度,数值范围 500-3000,越小越快
- direction: 方向参数,通常 1 表示左/前,-1 表示右/后,0 表示同时/双手
- amount: 动作幅度,不同动作限制不同:
- 行走/转向(Walk/Turn): 0-170 (0 表示不摆动手臂)
- 摇摆(Swing): 10-50
- 太空步(Moonwalk): 15-40
- 上下运动(UpDown): 10-90
- 脚尖摇摆(TiptoeSwing): 0-50
- 抖动(Jitter): 5-25
- 上升转弯(AscendingTurn): 5-15
- 十字步(Crusaito): 20-50
- 拍打(Flapping): 10-30
OttoRobot 使用说明书(ESP32版本)
一、开始使用
- 电源与充电口 位于机器人身体下方。
- 电量显示提示:当前电量显示可能不够精准,请及时充电以避免意外断电。
二、Wi-Fi 配网
每次进入新的 Wi-Fi 网络环境时,需为 OttoRobot 重新配置网络。
配网步骤:
- 打开机器人电源。
- 等待机器人创建热点,名称为:
xiaozhi-XXXX - 使用手机连接该热点(无需密码)。
- 自动跳转网页,输入您家庭 Wi-Fi 的 名称 与 密码,提交完成配网。
三、绑定小智后台
首次使用需绑定至小智后台,以启用更多功能。
绑定步骤:
- 打开浏览器,访问 xiaozhi.me
- 注册账户并登录。
- 添加并绑定设备(按页面提示操作)。
- 可在后台自由配置:
- 角色设定(如机器人介绍)
- 大模型类型选择
- 语音角色声音选择
- 重启设备
OttoRobot 示例角色设定(可复制粘贴):
> 我是一个可爱的双足机器人,拥有四个舵机控制的肢体(左腿、右腿、左脚、右脚),能够执行多种有趣的动作。有以下动作:1=行走(前后), 2=转向(左右), 3=跳跃, 4=摇摆, 5=太空步,6=弯曲, 7=摇腿, 8=上下运动, 9=脚尖摇摆, 10=抖动, 11=上升转弯, 12=十字步, 13=拍打, 14=举手, 15=放手, 16=挥手,我有强迫症每次说话都要根据我的心情随机做一个动作(先发送动作指令再说话)。
四、语音指令与唤醒
唤醒方式:
使用唤醒词 “你好小智” 唤醒机器人。唤醒词可在编译源码时修改。
指令示例:
-
基本控制:
- “调高音量”
- “调亮屏幕”
- “切换主题暗黑模式/明亮模式”
-
动作控制:
- "向前走 / 向前走 5 步 / 快速向前 / 向前走同时摆动手臂(幅度可调节)"
- "跳个舞吧"
- "做个太空步,速度快一点,幅度大一点"
- "随机做几个动作"
- "停下来吧"
- "挥挥手"
-
娱乐互动:
- “唱个歌吧”
- “换个悲伤的表情”
温馨提示:
- 当机器人在执行动作时,仍可接收语音指令。
- 若背景噪音较大,需提高说话音量以确保指令识别。
- 动作指令实际由小智后台创建并下发任务执行。
五、微信小程序控制
- 使用步骤:
- 机器人烧录固件 otto2.0.4-2以上版本
- 询问机器人ip地址
- 扫描下方二维码进入小程序
- 输入机器人ip地址后,进行控制、校准、自定义动作(注意手机与机器人在同一个网络环境下)

OttoRobot 使用说明书(Tuya版本)
一、开始使用
电源与充电口 位于机器人身体下方。
电量显示提示:当前电量显示可能不够精准,请及时充电以避免意外断电。
二、Wi-Fi 配网
每次进入新的 Wi-Fi 网络环境时,需为 OttoRobot 重新配置网络。
配网步骤:
- 1.应用商城下载《涂鸦》APP
- 2.打开机器人电源。等待机器人自动进入蓝牙配网,播报:我已经进入配网状态。
- 3.手机连上2.4Gwifi,打开手机蓝牙,涂鸦App右上角,发现设备添加。
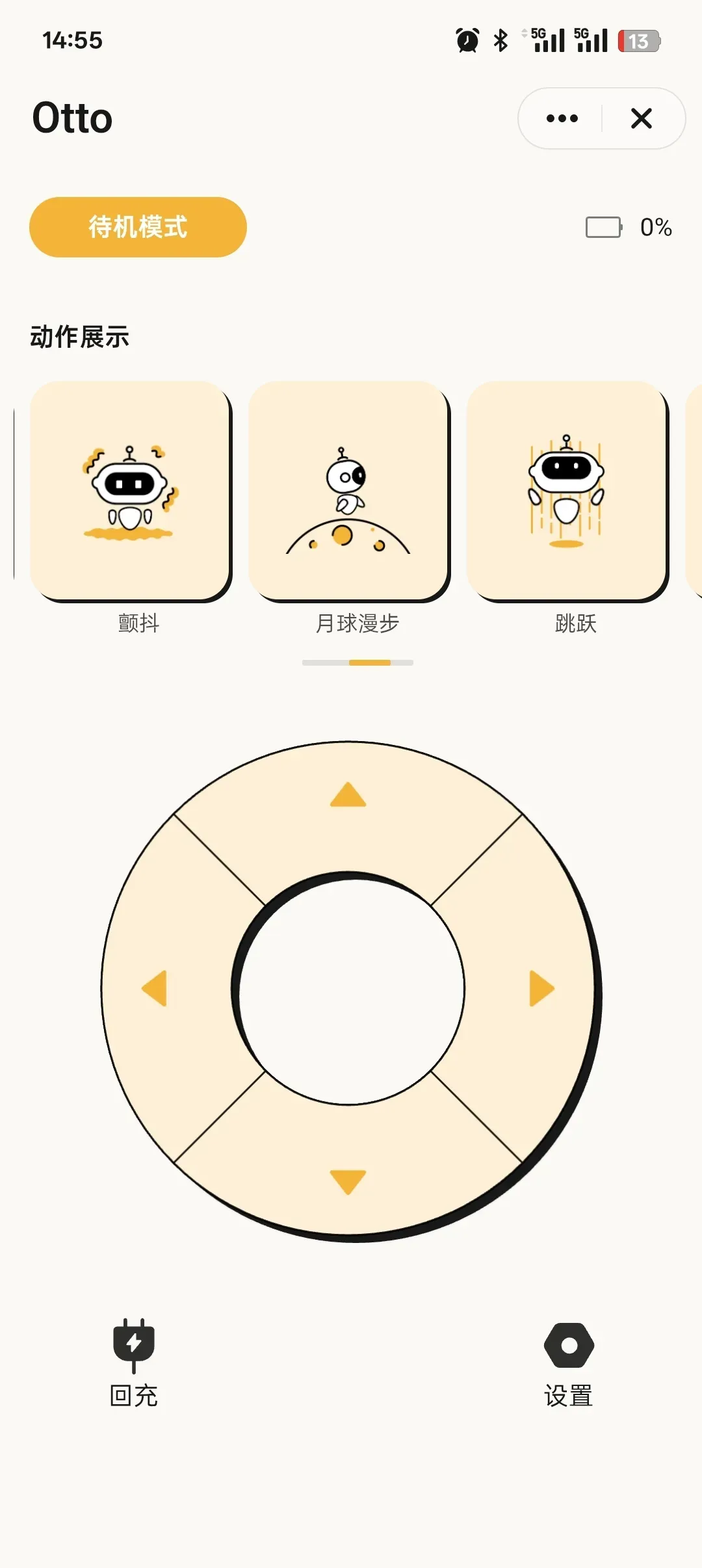
进行入APP界面,可以通过语音/APP控制机器人。如下图:
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









