



【星火计划】低功耗宠物智能项圈
简介
基于Air8000的超低功耗的长待机续航宠物智能项圈,uA级待机电流,具有定位追踪(GNSS/LBS/气压计),运动检测(加速度计/振动开关),充放电自动切换管理等功能,可实现宠物外出时的防丢和寻回
简介:基于Air8000的超低功耗的长待机续航宠物智能项圈,uA级待机电流,具有定位追踪(GNSS/LBS/气压计),运动检测(加速度计/振动开关),充放电自动切换管理等功能,可实现宠物外出时的防丢和寻回开源协议
:CC BY-NC-SA 4.0
(未经作者授权,禁止转载)描述
复刻须知
1.请遵守本项目开源协议( CC BY-NC-SA )
- 该作品及演绎作品不被允许用于商业目的
- 复制该作品及演绎作品时,必须明确标注原作者的姓名、提供协议链接,并指出是否对作品进行了修改
- 如果您对原作品进行了再创作,您所产生的新作品必须使用与原作者相同的协议进行分发(即也采用 CC BY-NC-SA)
2.复刻时请注意法规要求及第三方平台政策:
- 本项目具有无线电收发和定位功能,复刻时请注意是否符合当地法规,且不得用于侵犯隐私等违法用途
- 本项目用到第三方API,复刻时请注意第三方API的使用规定和用户协议并自行申请相应的权限
3.关于制作和使用的提醒:
- 复刻请仔细检查电路和元器件状态,避免发生电气故障
- 部分原件对于焊接条件和ESD有严格要求,复刻前建议仔细阅读原件规格书,以避免造成故障或损失
- 本项目设计中带有锂电池,请自行选择符合相关安全标准的产品,并注意使用环境
- 本项目设计中包含锂电池插拔接口,建议在长期不用时移除锂电池并妥善保管
- 本项目不能只依靠烙铁焊接,至少需要风枪和锡膏
- 复刻和使用时请自行评估难度与可靠性
项目简介
本项目基于Air8000A的超低功耗的长待机续航宠物智能项圈,uA级待机电流,具有定位追踪(GNSS卫星定位/LBS基站定位/气压计测高),运动检测(加速度计/振动开关),充放电自动切换管理等功能,可实现宠物外出时的防丢和寻回。
基于超低功耗待机和5米级GNSS定位,也能实现对于其他物品(如车辆载具、户外装备等)的较高精度防丢失定位,具有二次开发空间。
项目功能简介
本设计是基于基于Air8000A模组的超低功耗的长待机续航宠物智能项圈,结合GNSS定位和4G基站通讯,实现对宠物的定位追踪,当处于建筑物内时,亦可适用基站定位和气压计高度推算,实现大致范围的室内定位。
基于后端计算和指令下发,可实现当运动超出电子围栏范围时,推送提示以避免宠物丢失,亦可远程触发设备搭载的蜂鸣器寻回宠物,此外设备会上报运动信息和电池电压,以提供运动情况和设备电量数据。
项目核心功能
- 定位与追踪:户外定位(精度≤5⽶,基于AGPS+GNSS);⽀持基站辅助定位(室内环境定位采用基站定位+气压计测高实现)
- 电⼦围栏:⾃定义安全范围(≥100⽶),触发越界推送报警
- 轨迹记录:存储7天运动路径,⽀持历史轨迹回放
- 声⾳交互:可远程开启蜂鸣器发出声⾳
- 健康监测:当宠物⻓时间未进⾏运动,在⼩程序或app能触发提醒
项目参数
| 项目参数 | 设计情况 |
|---|---|
| 电池规格 | 1000mAh 3.7V 聚合物锂电池 |
| 定位方式 | 基站定位+卫星定位+气压计测高 |
| 通讯方式 | 4G LTE |
| 上报频率 | 最短1分钟1次 |
| 休眠功耗 | <1mA |
| 正常模式续航 | ≥48小时@正常模式(30分钟上报一次) |
| 低功耗模式续航 | ≥7天@低功耗模式(60分钟上报一次) |
| 充电方式 | Type-C 5V(支持C to C) |
| 烧录调试方式 | UART或Type-C USB串口 |
| OTA升级方式 | 基于4G LTE网络下载升级包 |
- 续航时间受到上报频率,GNSS信号强度,4G LTE信号强度,使用环境(如气温、4G LTE或GNSS信号不佳),使用方式(如频繁进行OTA、启用蜂鸣器)等的影响
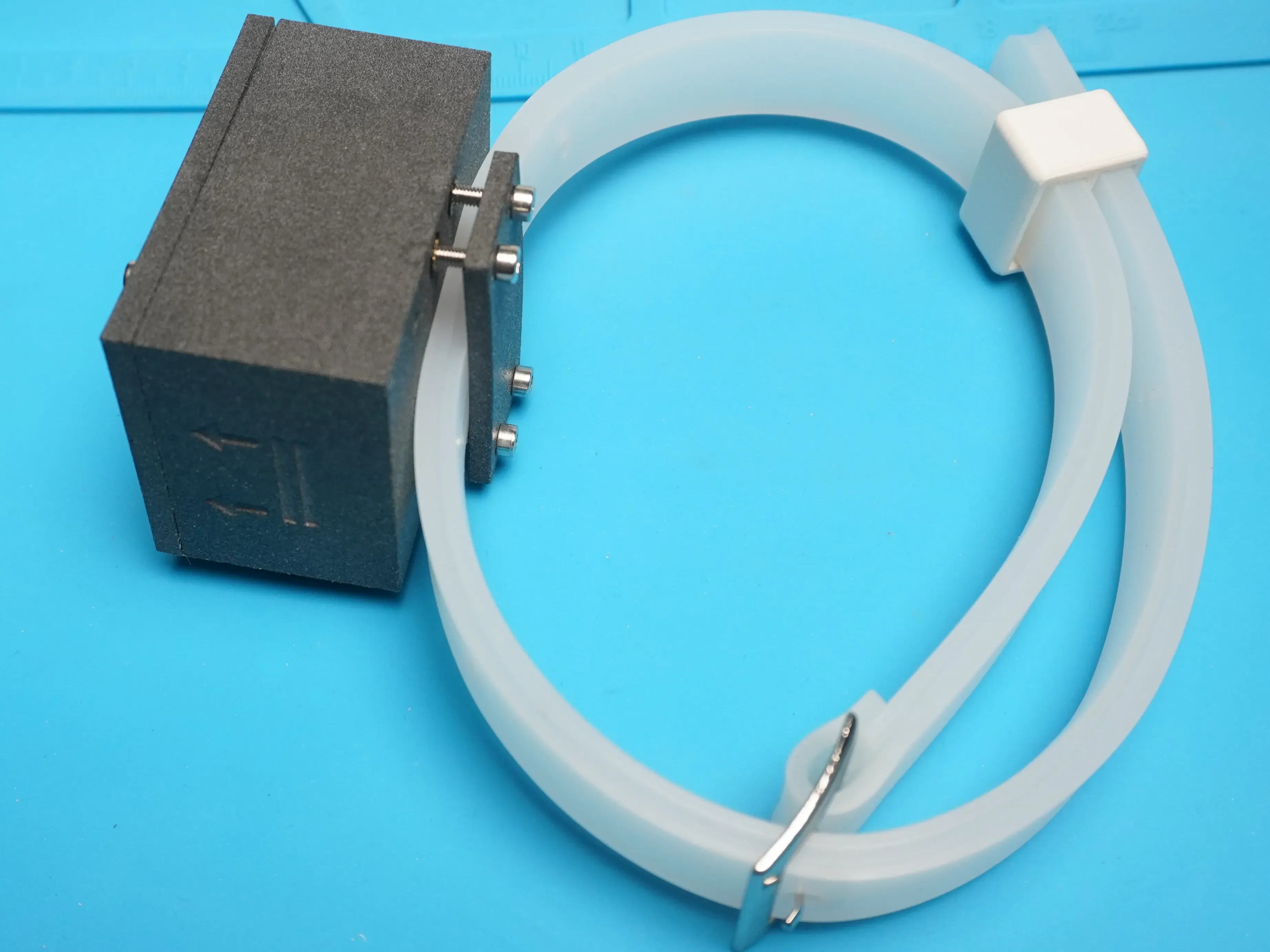
- 可自行制作食品级硅胶项圈,亦可搭配尺寸合适的成品项圈,采用压板固定,对项圈或其他固定方式兼容性强
原理解析(硬件说明)
电源
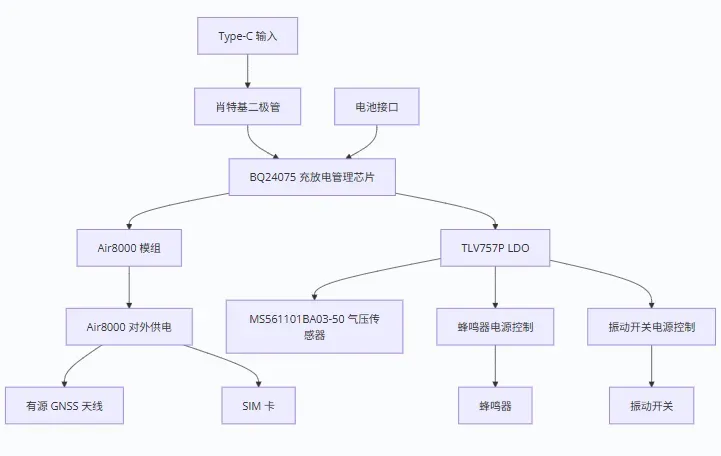
拓扑示意图:
USB Type-C接口电源电路:
采用TYPE-C-16P接口作为供电接口,经ESD二极管后,将USB信号传入Air8000的USB调试引脚,可实现直接使用USB-C 接口作为下载和调试,无需转换串口信号,便于调试。
USB供电经ESD二极管后到充放电管理芯片,另设SS14肖特基二极管避免接口进水导致短路,接口处可使用电子密封胶以实现接口防水+日常进水不断路。
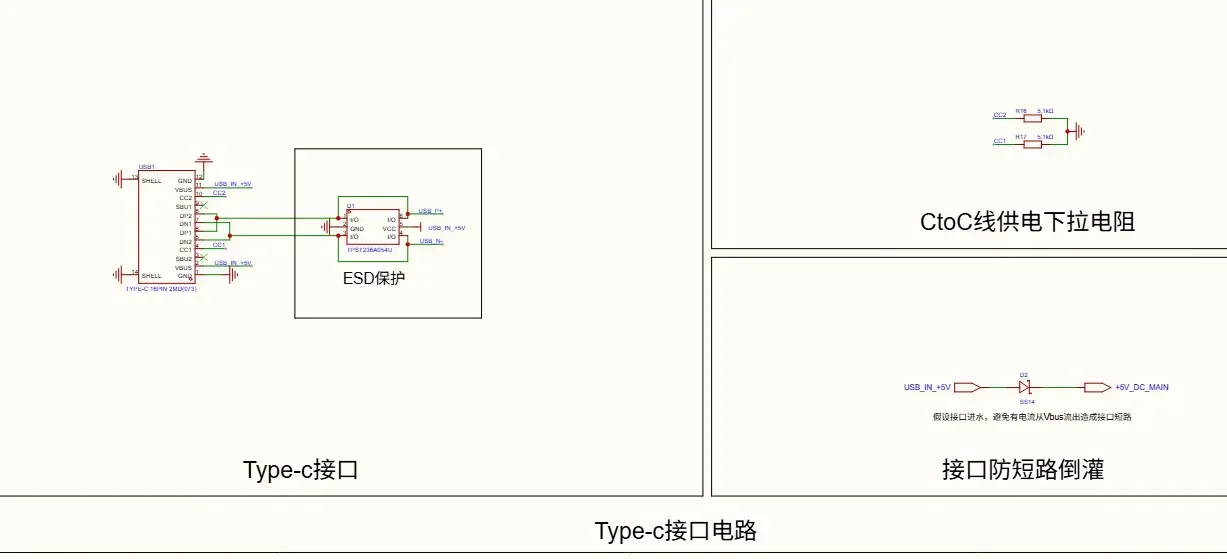
- 在CC1和CC2引脚处加入5.1K下拉电阻,并在PCB设计时做阻抗等长设计,以符合USB-IF规范;
- 做包地处理,以防干扰。
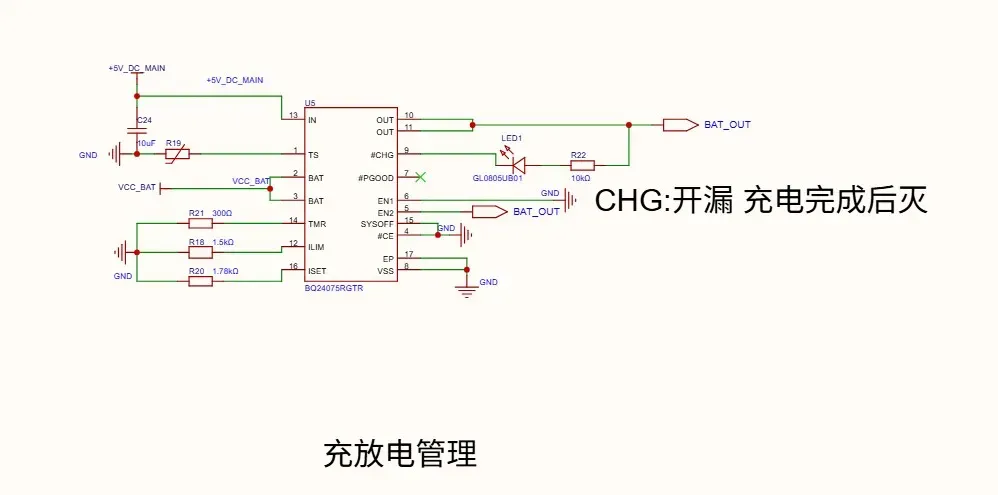
电源与锂电池充放电管理:
USB供电输入后,经ESD二极管到BQ24075 充放电管理芯片,该芯片负责电池充放电和充放电路径切换功能,以实现给模组和外围原件供电,并具备限流和温度控制功能,由一个LED灯提供充电完成指示。
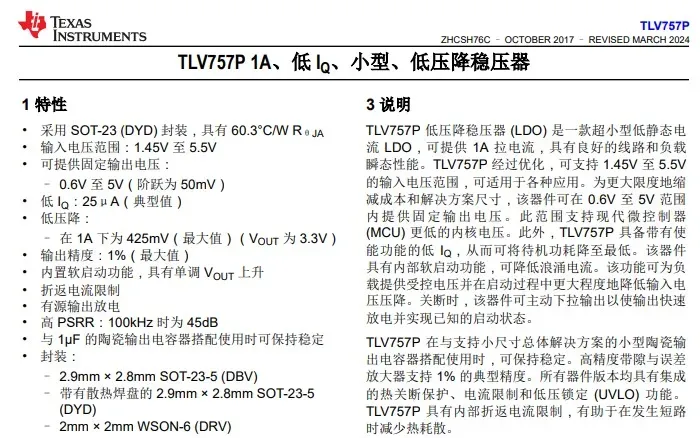
外围电路LDO:
采用TLV75733PDBVR低IQ型LDO,具有25uA的静态功耗(典型值),可以满足超低功耗需求下的外围元件供电;
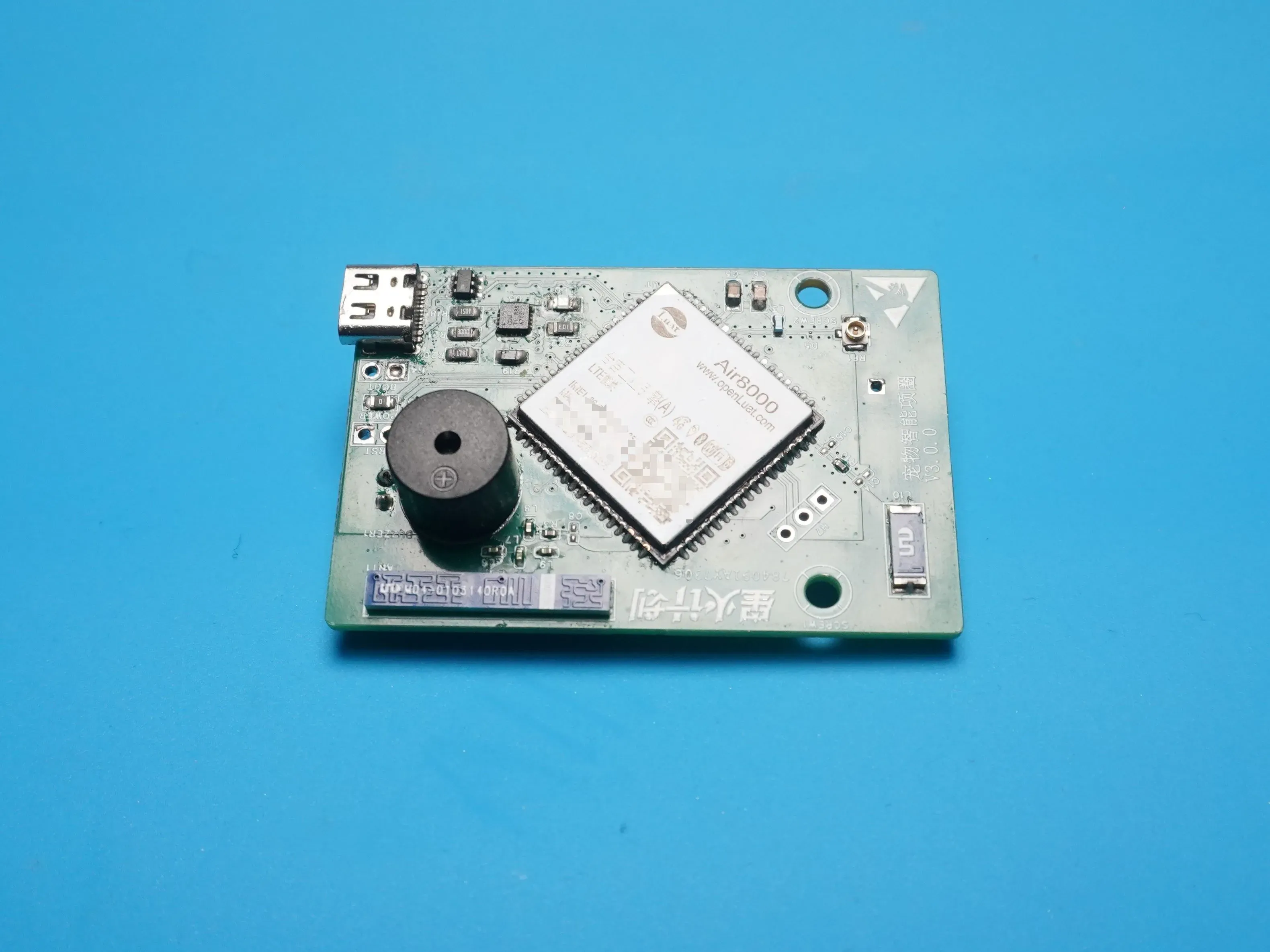
主控部分:
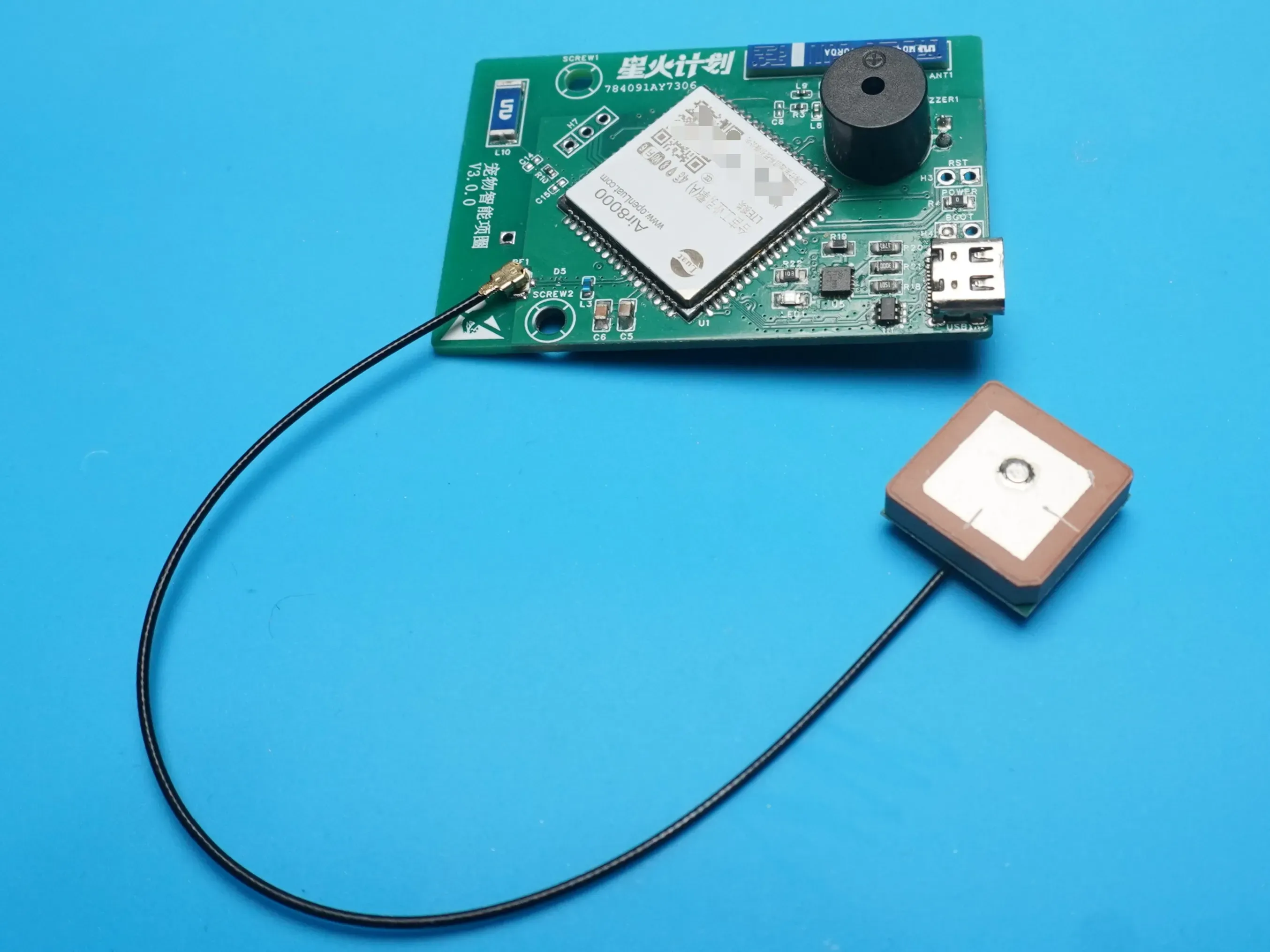
本设计采用合宙Air8000A系列通讯模组,模组提供4G LTE通讯、GNSS/北斗卫星定位、加速度传感器与振动传感器等的功能,并实现uA级别的待机电流;
对于Air8000A模组,射频电路工作时会产生电流突峰,依照模组硬件设计指南建议,在供电输入部分添加钽电容和MLCC电容以应对电流突峰并滤波,并通过配置电阻的形式实现自动开机。
电路设计与PCB layout参考资料
天线部分:
天线分为LTE/GNSS/WI-FI三个天线,其中LTE和WI-FI天线以贴片方式板载,有源GNSS天线以IPX-1接口连接,在PCB设计上保障信号完整性。
GNSS天线采用外置有源天线,天线内置LNA放大器,大幅提升信号接收质量并提升定位速度,天线供电由模块内部控制
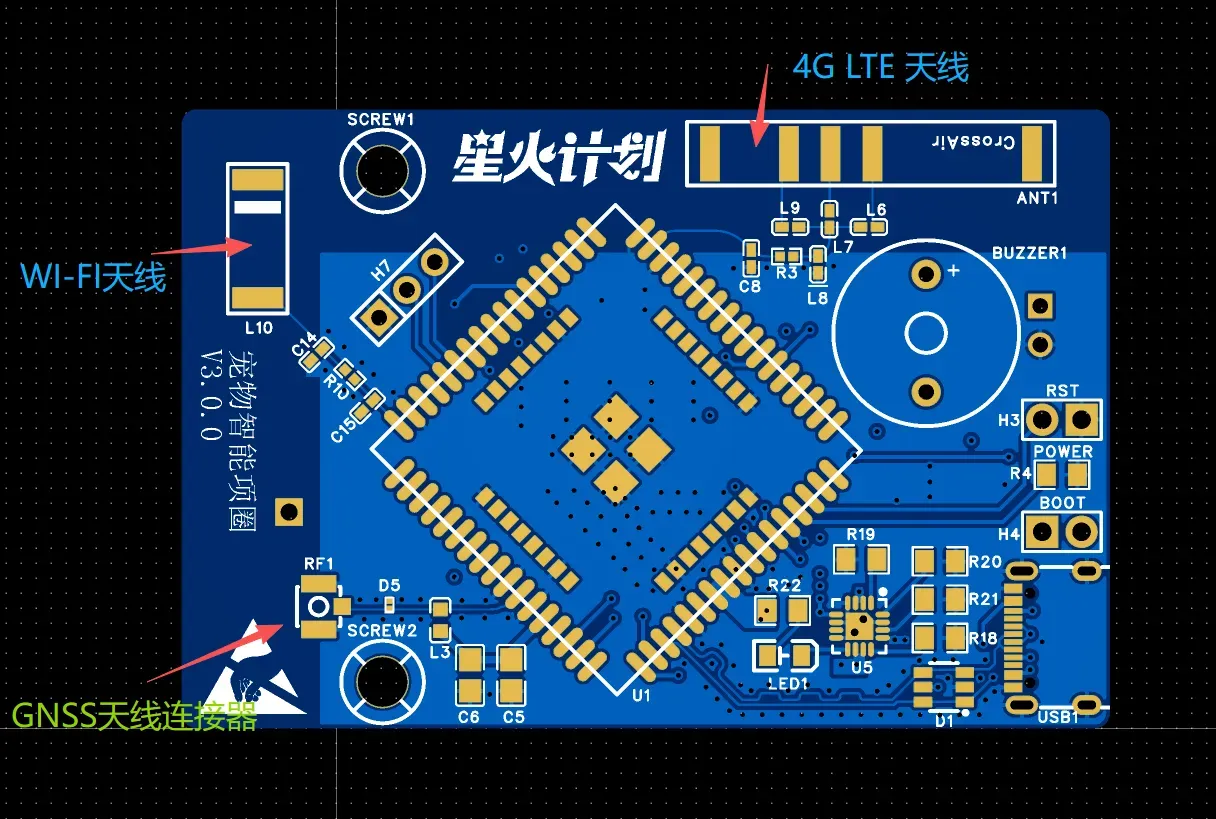
- WI-FI与BLE共用一个天线,为室内定位功能预留,可二次开发实现基于WI-FI/BLE数据库的定位功能。
外设:
搭载MS561101BA03-50气压传感器、TMB12A03蜂鸣器、振动开关、DA221加速度计(内置于Air8000A),以实现室内定位场景的气压测高及蜂鸣器和运动检测功能。
| 外设 | 特性 | 功耗 |
|---|---|---|
| MS561101气压计 | 低功耗,高精度 | 1 µA (standby < 0.15 µA) |
| TMB12A03蜂鸣器 | 有源蜂鸣器 | 供电由mos管理 |
| 振动开关 | 不可调整灵敏度 | 供电由mos管理 |
| DA221加速度计 | 可调灵敏度 | 供电由Air8000内置控制 |
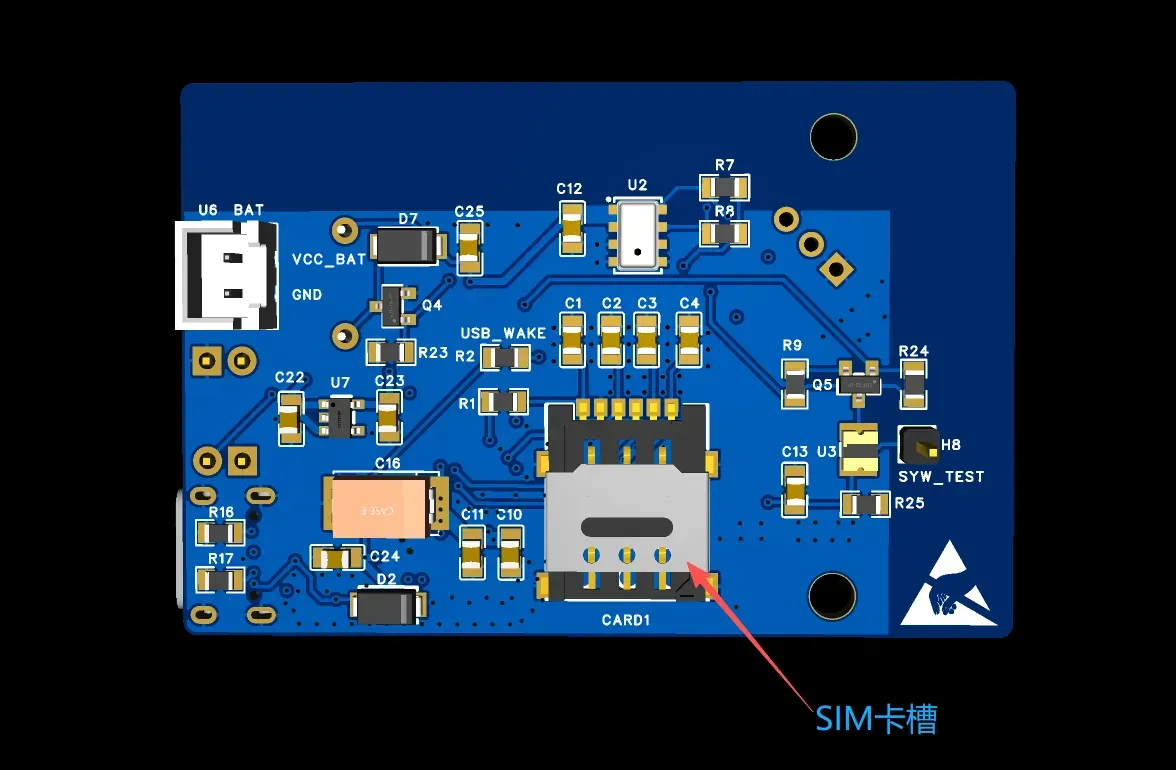
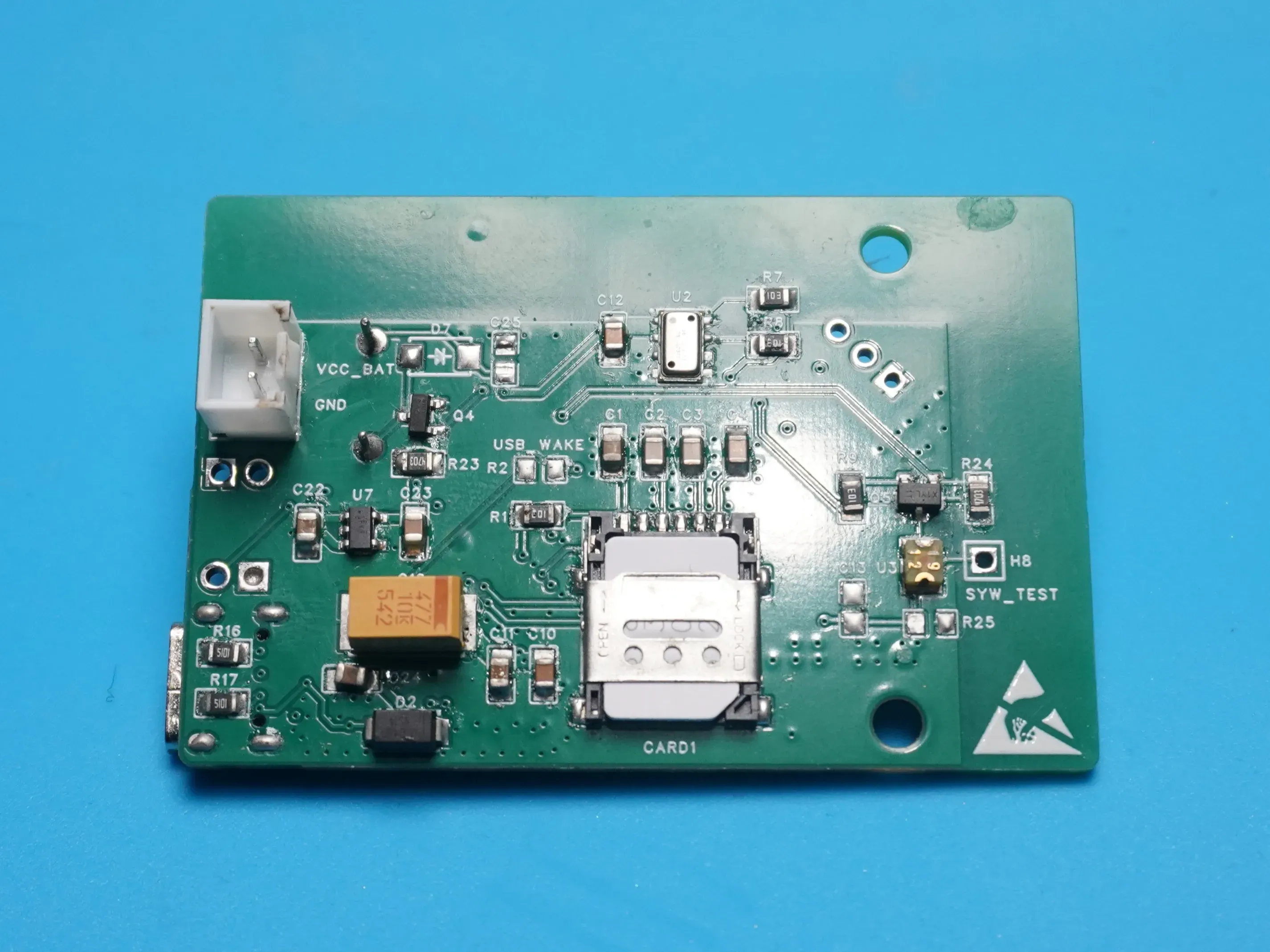
SIM卡槽:
- 由AIR8000供电并直连AIR8000,单卡槽设计,数据电路做包地处理,以防止干扰。
- 插拔SIM卡前应释放静电,以免损坏模块
软件简介
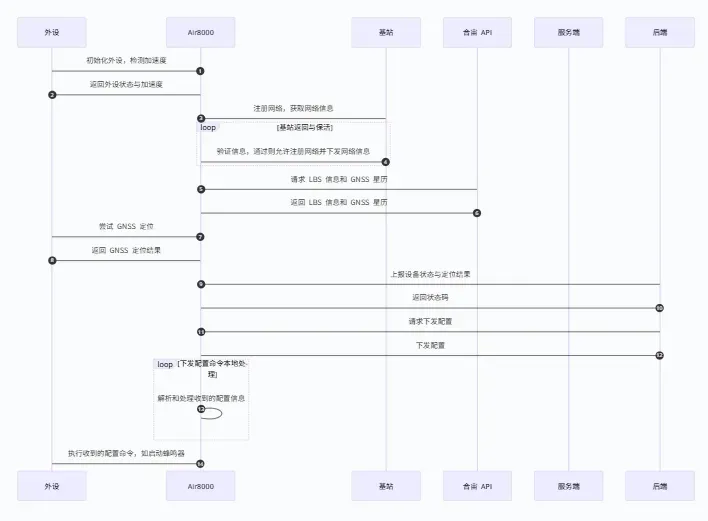
时序图
软件拓扑示意图
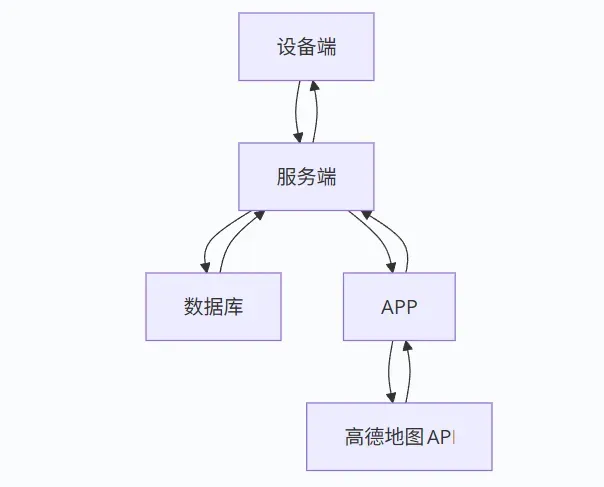
通讯方式
- 本项目硬件层面支持蓝牙/WI-FI/4G LTE,目前版本使用4G LTE进行通讯
- 设备端和服务器端通讯协议为HTTP(TCP)/MQTT,
-
- HTTP(TCP)协议主要用于:设备上报数据、获取最新配置、OTA升级,设备端调用第三方基站定位服务、星历下载等功能
-
- MQTT主要用于设备在轻睡眠模式下的实时指令下发,实现低功耗待机且及时的命令响应
-
- 不限制服务端部署平台和环境,支持PHP+Mysql环境即可
功能实现介绍
- 常见定位方式分以下几种:
| 定位方式 | 基站定位 | 卫星定位 | WI-FI定位 | 蓝牙定位 |
|---|---|---|---|---|
| 支持性 | 支持 | 支持,北斗+GPS双模 | 硬件预留 | 硬件预留 |
| 采用情况 | 用于室内定位和户外辅助定位 | 用于室外定位 | 目前版本未作开发 | 目前版本未作开发 |
| 采用原因 | 定位速度快,有4G网络即可定位 | 定位精度高 |
- 本项目引入了一个外置气压计,实现室内/户外定位的高度测量
- 需在4G LTE网络信号良好的环境使用,若无法建立网络连接,设备端不会暂存本次定位结果
- 目前基站定位实现方式为单基站定位,若所在环境有多个不同id的基站且都信号强,设备可能在基站间漫游,造成基站定位漂移
部署方法
- 部署前建议先查阅软件包里的部署说明
1.自行申请地图API及推送服务API权限,也可根据需求二次开发
2.在后端代码config.php文件中填入API KEY、设备IMEI、自定义的后台登陆用户名和密码,部署后端
3.在APP代码中填入API KEY、自定义的后台地址,构建APP
3.配置luatos Air8000开发环境,在设备端配置文件config.ljson中写入服务器地址等参数信息
4.烧录固件代码到设备
注意事项
- 建议调试时先接入电池再插入Type-c
- 建议调试时使用供电能力足够的USB接口,以避免供电不足导致BUG,必要时可用独立供电的USB-HUB
- 建议任何操作前都释放静电,以避免静电打坏射频PA和损坏模组
- 建议使用大品牌的Type-C数据线且不宜过长,否则可能存在信号完整性问题和供电问题
- 可酌情对电路进行封闭处理,以免意外进水损坏
- 烧录环境建议采用最新的固件和WI-FI固件,若不正常,可使用量产固件中内置的固件版本再次尝试
- 打板请用JLC04161H-3313(成品板厚1.56mm±10%)层压结构
- 基于项目需求,没有配置纠偏逻辑和抗漂移,并且不要求3D-FIX,以实现高实时性跟随定位,若出现GNSS定位漂移,请检查设备天线是否足够净空,到户外测试(如公园、广场等空旷场地),若漂移情况比较严重请考虑是否被干扰
- 不建议上报频率过高,频率过高会导致查看历史轨迹时触发高德API限速,可能导致位置标记显示不全等软件BUG
- 项目中部分电路设计是便于调试使用,请参照实物图焊接,实物图没有焊接的元件/排针在复刻时也无需焊接,否则可能导致工作异常/外壳装不下/顶到电池引发危险
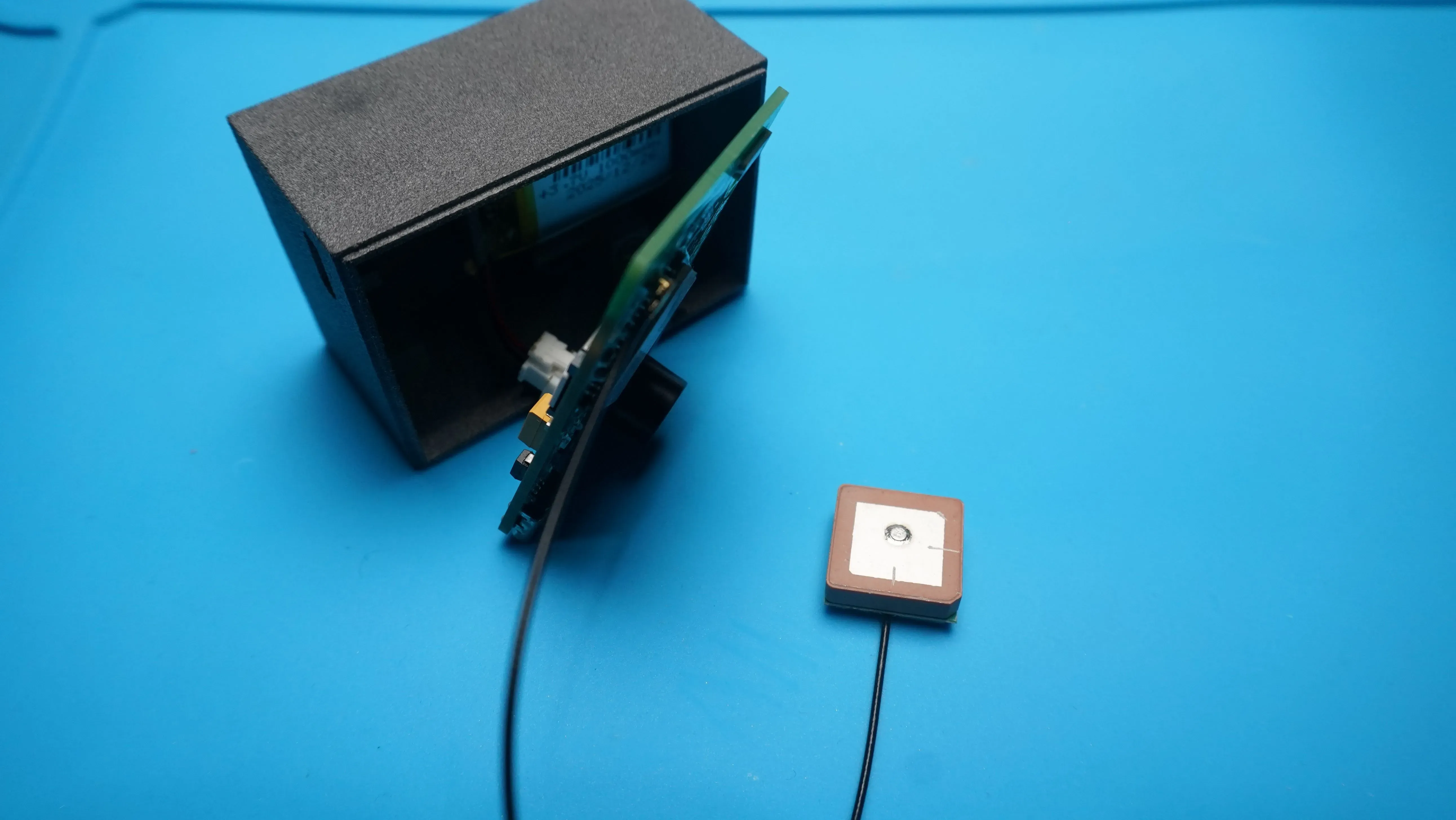
组装流程
在外壳安装螺母

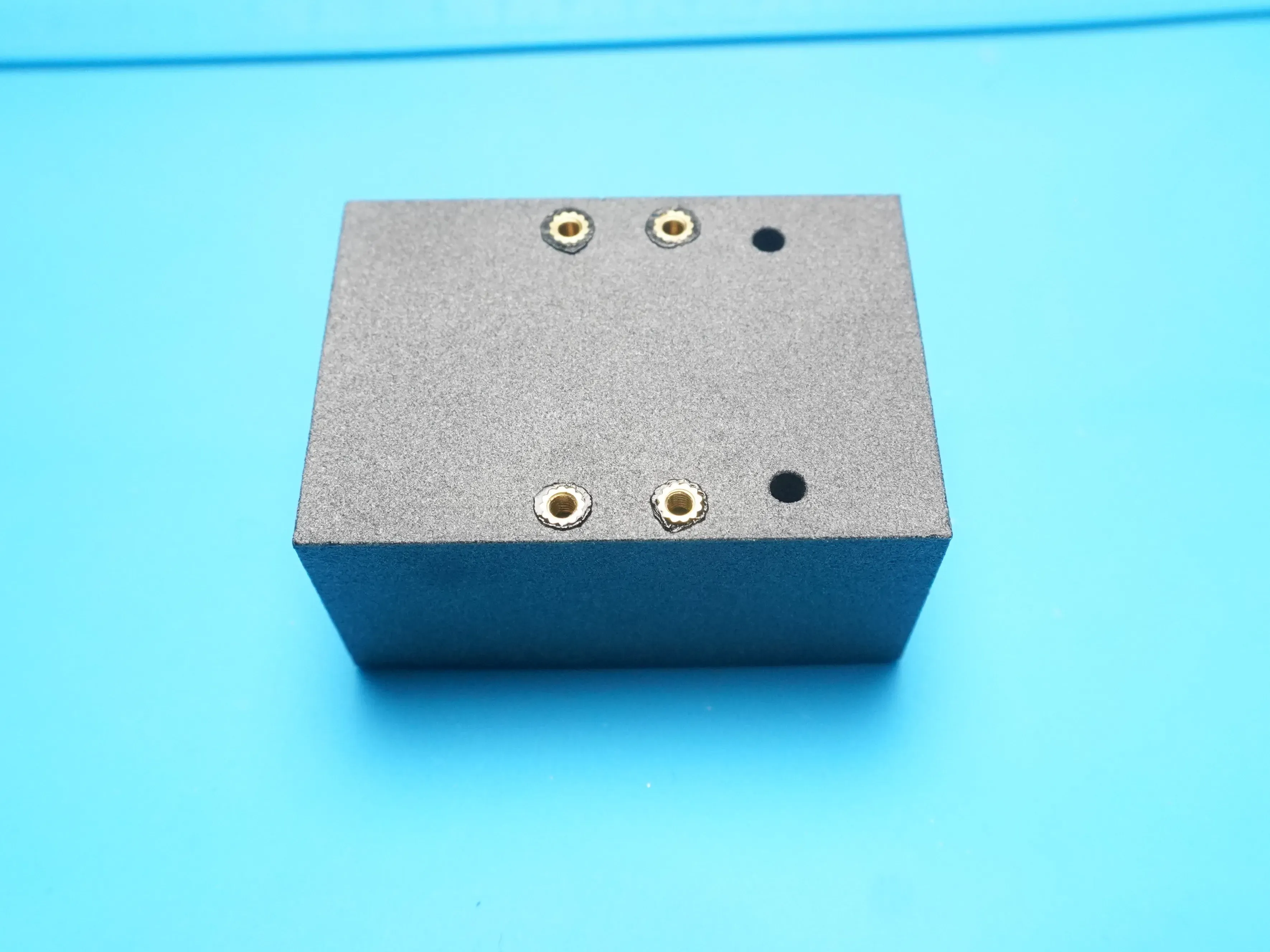
焊接PCB
测试休眠状态功耗符合预期(应为ua级别,低于1mA)
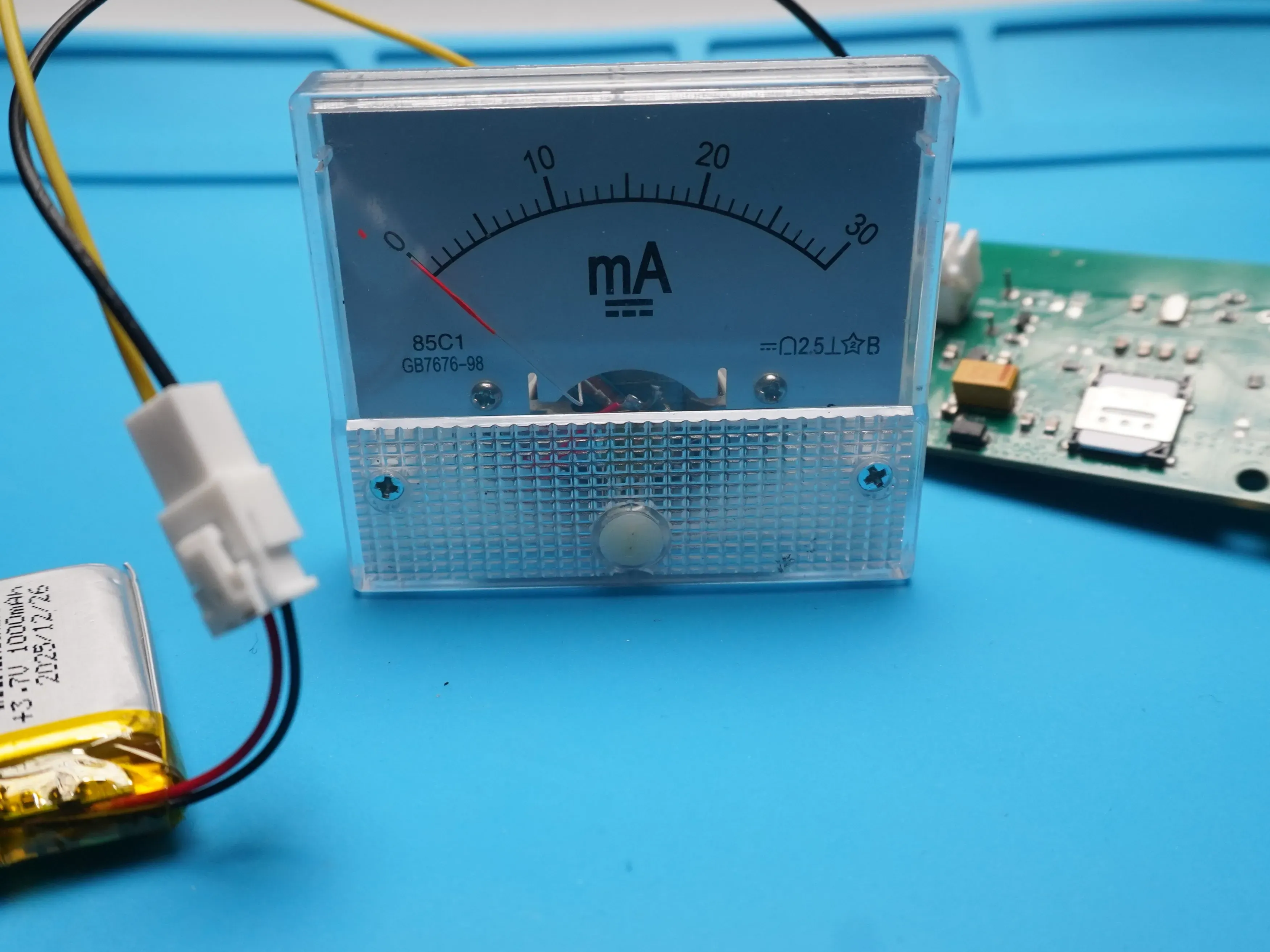
安装电池

- 可适度点热熔胶辅助固定
连接GNSS天线
电池连接主板
- 可适度点热熔胶辅助固定主板
安装GNSS天线至外壳
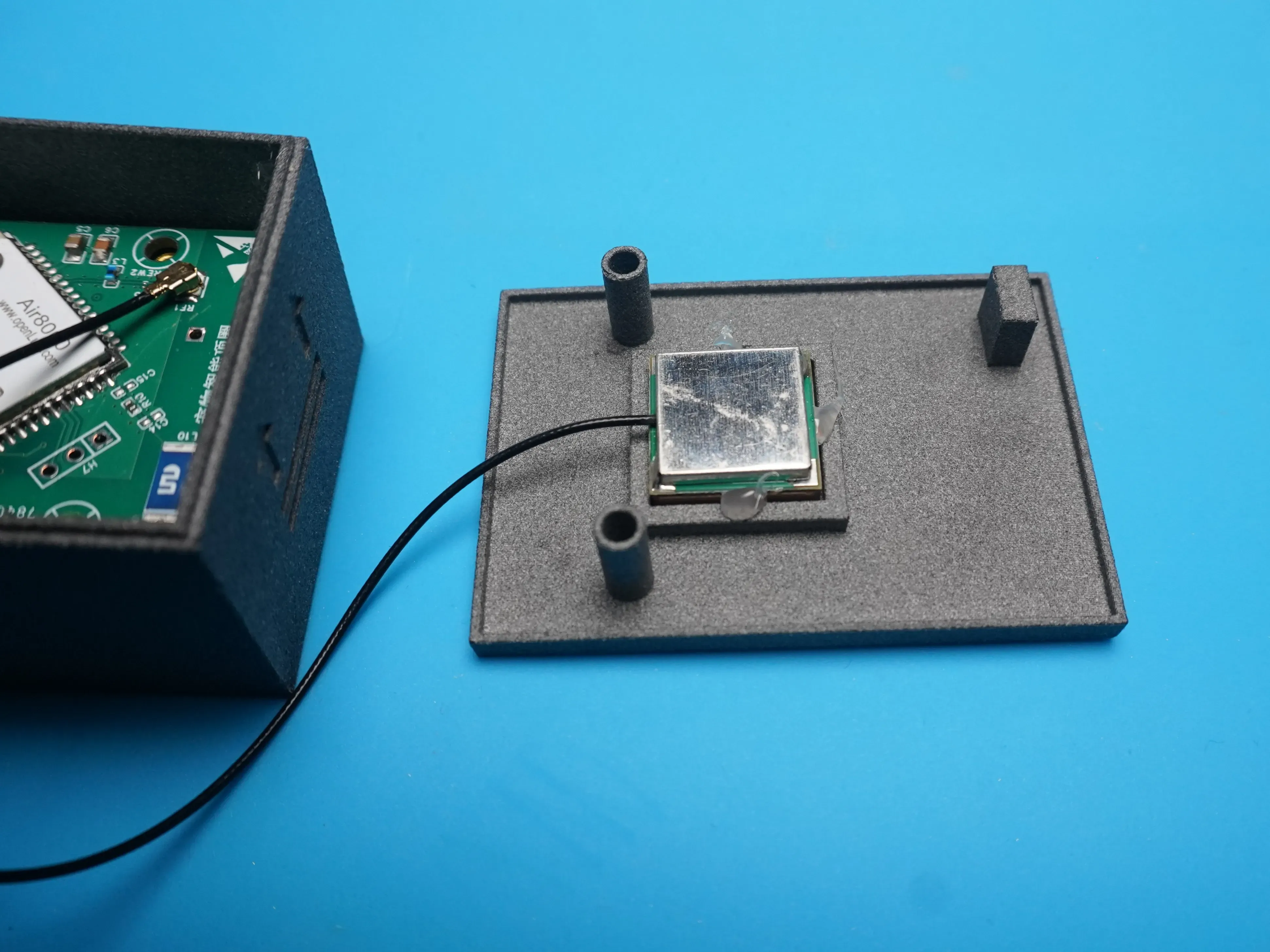
- 可适度点热熔胶辅助固定GNSS天线
安装顶盖
- 螺丝规格至少为M3*20
安装项圈
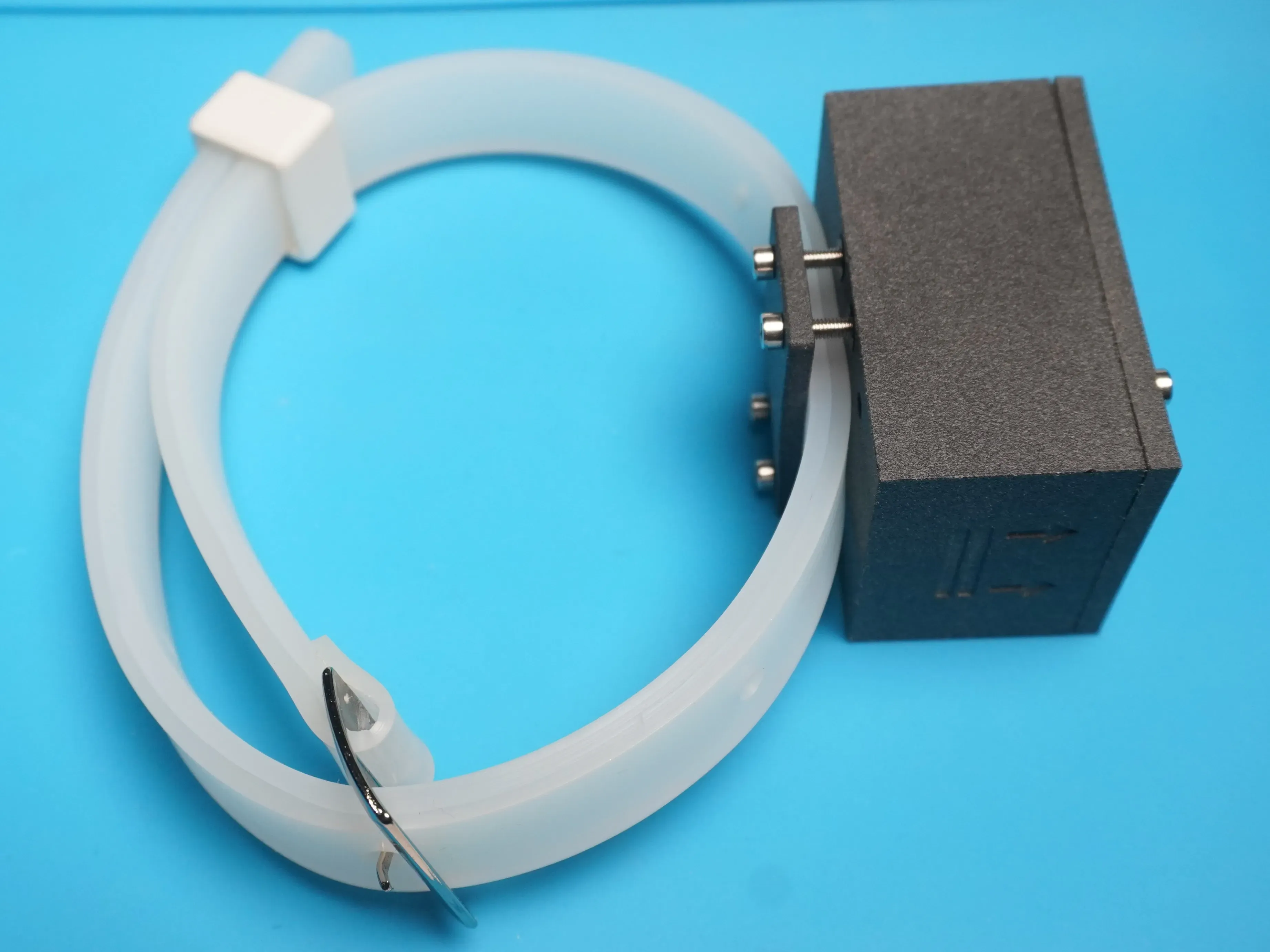
- 螺丝建议最大M3*20,适配大部分项圈厚度,超长可能顶到主控板
实物图
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









