


灵动狗LinkDog焊接板
简介
灵动狗LinkDog:一款四足机器狗,可以通过微信小程序遥控,可以完成前进、后退、左转、右转、站立、趴下、坐下、左右摇晃、前后摇晃、伸懒腰等动作,也可以修改程序实现属于自己的动作模式。
简介:灵动狗LinkDog:一款四足机器狗,可以通过微信小程序遥控,可以完成前进、后退、左转、右转、站立、趴下、坐下、左右摇晃、前后摇晃、伸懒腰等动作,也可以修改程序实现属于自己的动作模式。开源协议
:CC-BY-4.0
描述
视频链接:
项目简介
本项目是基于ESP32C3单片机的四足机器狗,可以通过微信小程序遥控,可以完成前进、后退、左转、右转、站立、趴下、坐下、左右摇晃、前后摇晃、伸懒腰等动作,也可以修改程序实现属于自己的动作模式。它还可以通过串口连接小智AI,使用小智的语音控制运动。
开源地址
https://gitee.com/jeremywang0102/linkdog
里面有固件和3D模型资料。
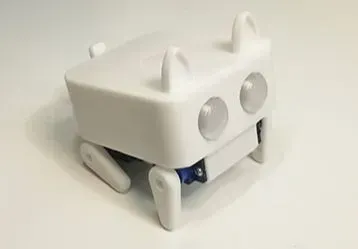
实物图
组装完成后完整实物图




其他模块
1、电源模块:https://item.taobao.com/item.htm?id=582439356380 选择升级版。
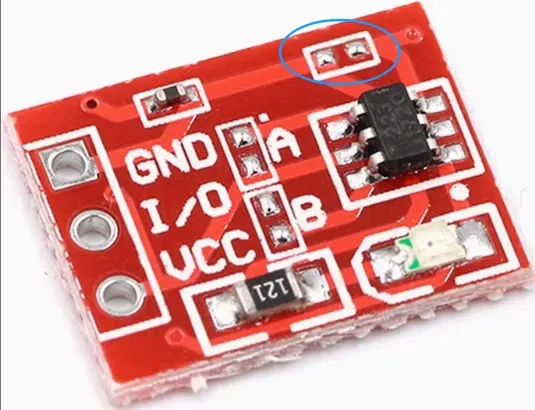
2、触摸模块:https://item.taobao.com/item.htm?id=551757117814
切记:触摸板此处需要焊接一个0402 20pF的电容,降低触摸灵敏度。
3、主控模块:ESP32C3 Super Mini https://item.taobao.com/item.htm?id=779422576392 选择ESP32-C3内置4M内存。
补充说明
1、电容、电阻尽量多备几个,太小容易丢;
2、6个小螺钉(1.4x4mm)用于安装耳朵、尾巴、触摸板盖、指示灯透明板,16个大螺钉(2x6mm)用于安装脚、舵机、主板、眼睛板,螺丝刀为2mm十字;
3、1.25mm的3P插座型号为MX1.25mm线长度10cm;
4、18650电池2000mAH,插座为XH2.54-2P;
5、舵机型号为SG90 180度。
材料合集
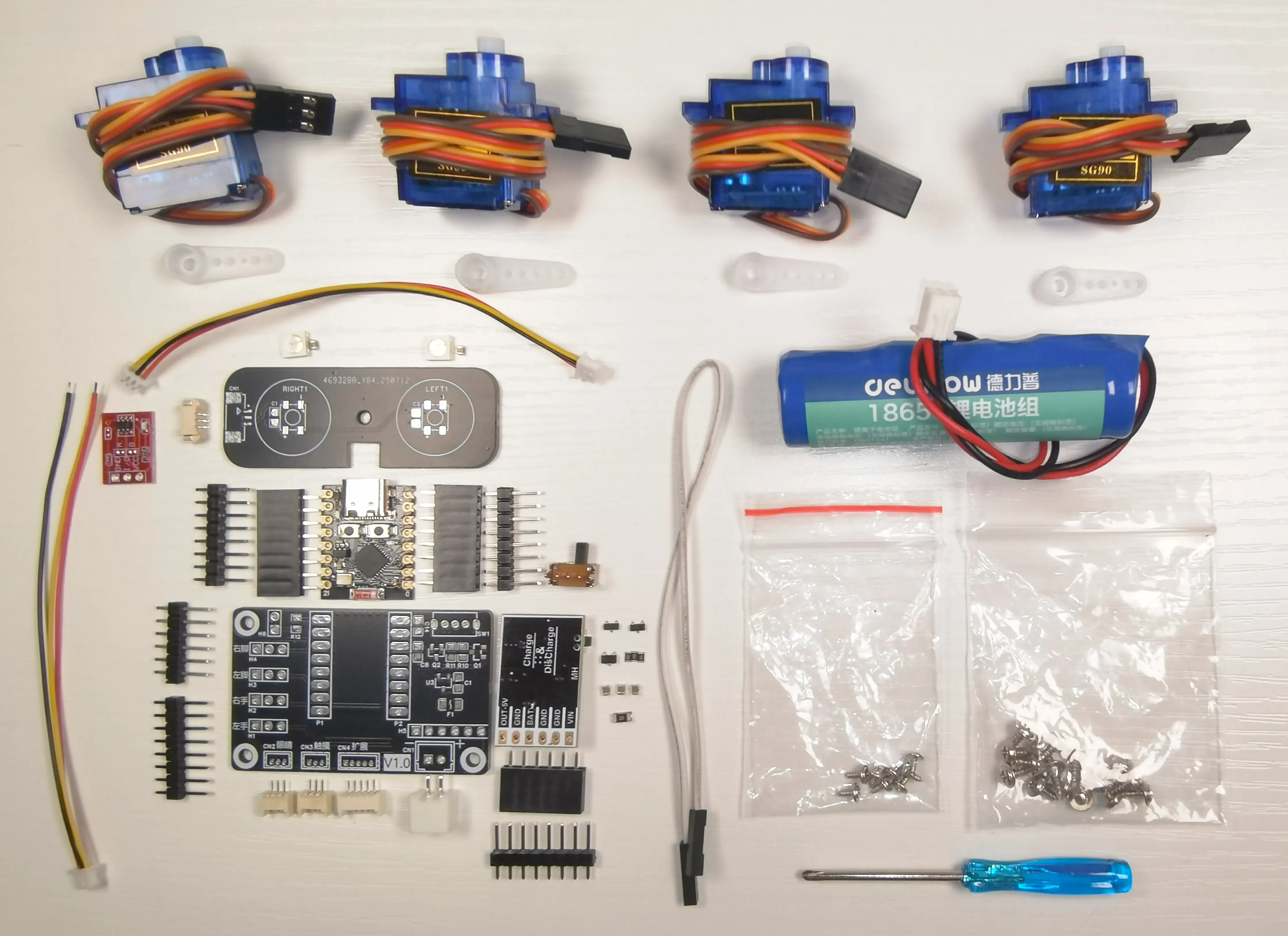
1个ESP32C3 MINI模块、1个触摸模块、1个电池、4个SG90舵机、1块眼睛电路板、1块主板电路板、1个电源模块、2个WS2812B、4个0805的100nF电容、4个0805的22uF电容、3个0402的20pF电容、4个0805的10k电阻、1个开关、2个1x8P排母、5个1x8P排针、1个1x6P排母、3个1.25mm3P插座、1个1.25mm5P插座、1个2.54mm2P插座、1个SOT-23贴片三极管、1个SOT-23贴片MOS管、1个SOT-23贴片电源芯片、1个1206保险丝、1根单头1.25mm3P插线、1根双头1.25mm3P插线、1根杜邦线、1把十字螺丝刀、若干螺丝钉。
第二代LinkDog

https://oshwhub.com/linkdog/linkdog-v1-3
第三代LinkDog(接入小智AI)
设计图
BOM
 克隆工程
克隆工程知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









