

专业版
【立创开发板】追问•具身AI六轴机械臂
1.5w
0
0
44
简介
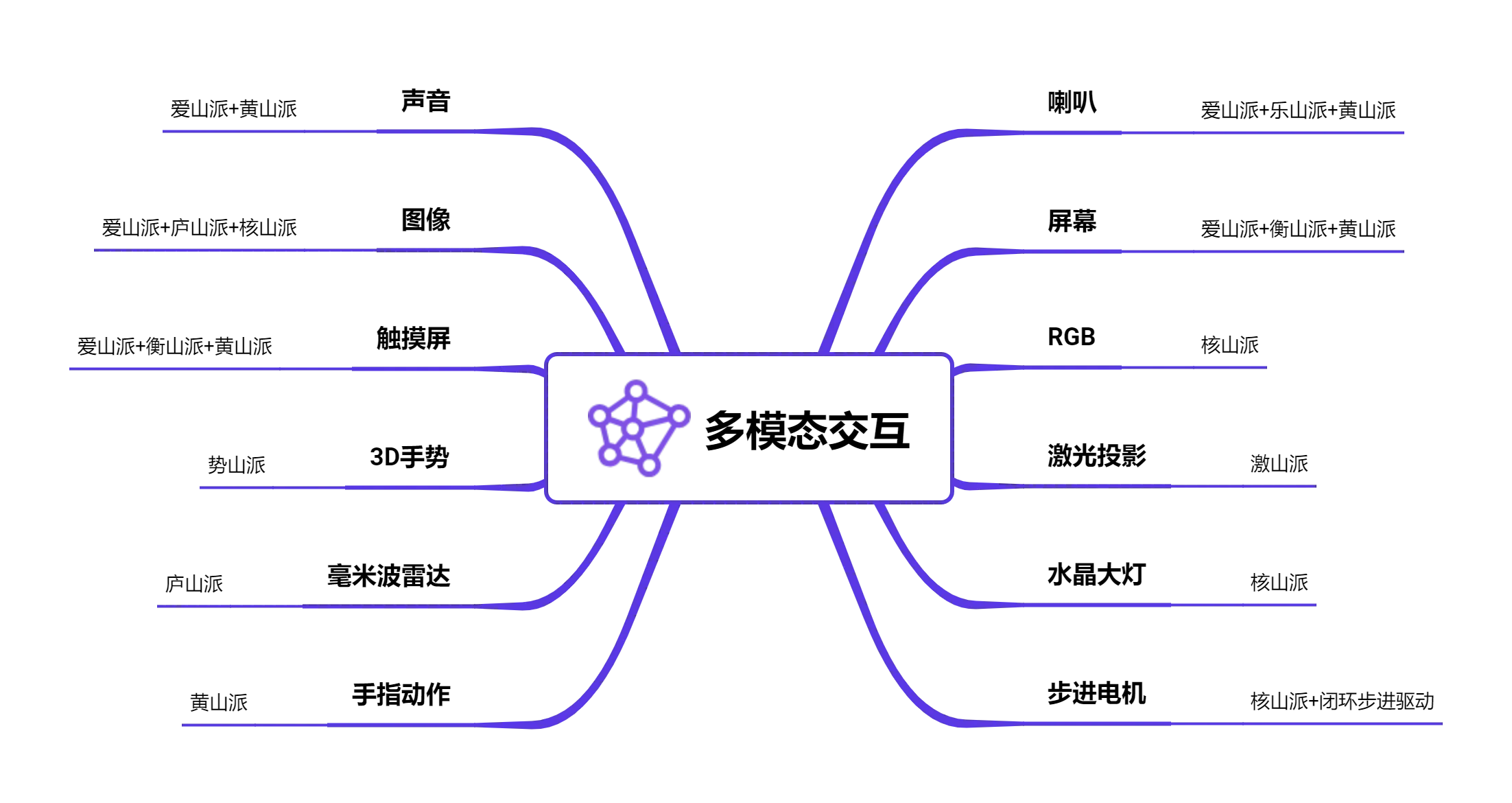
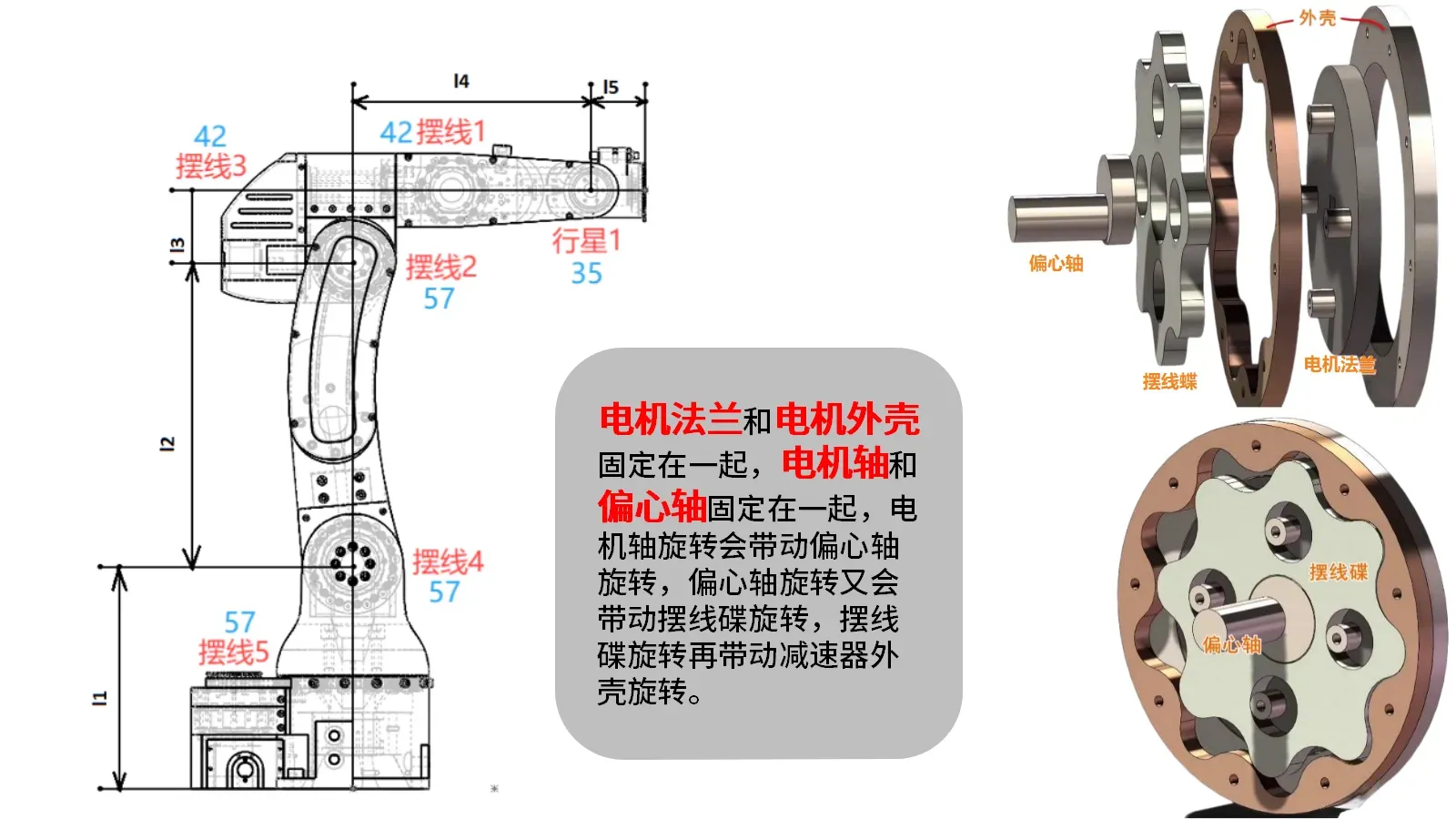
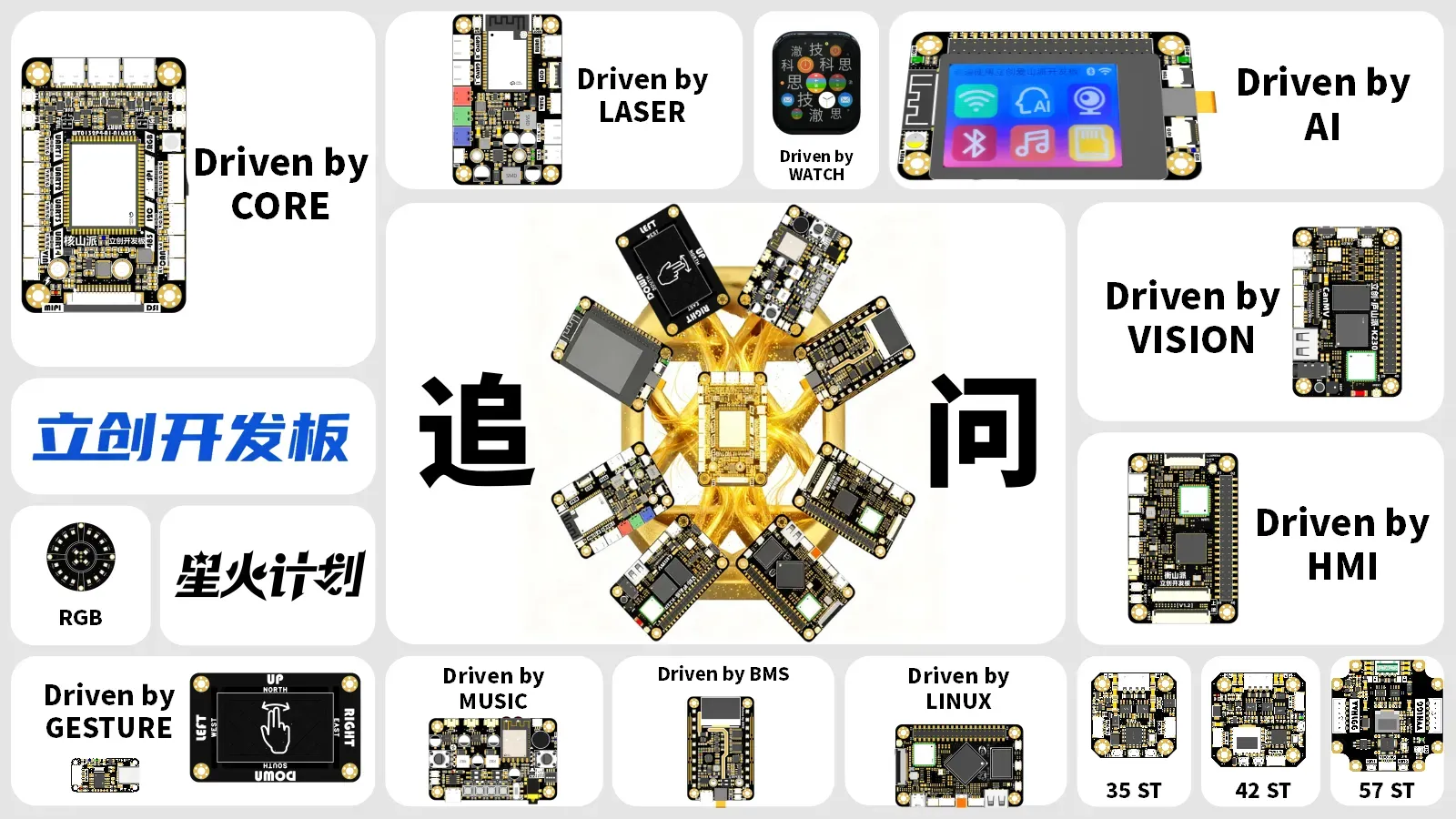
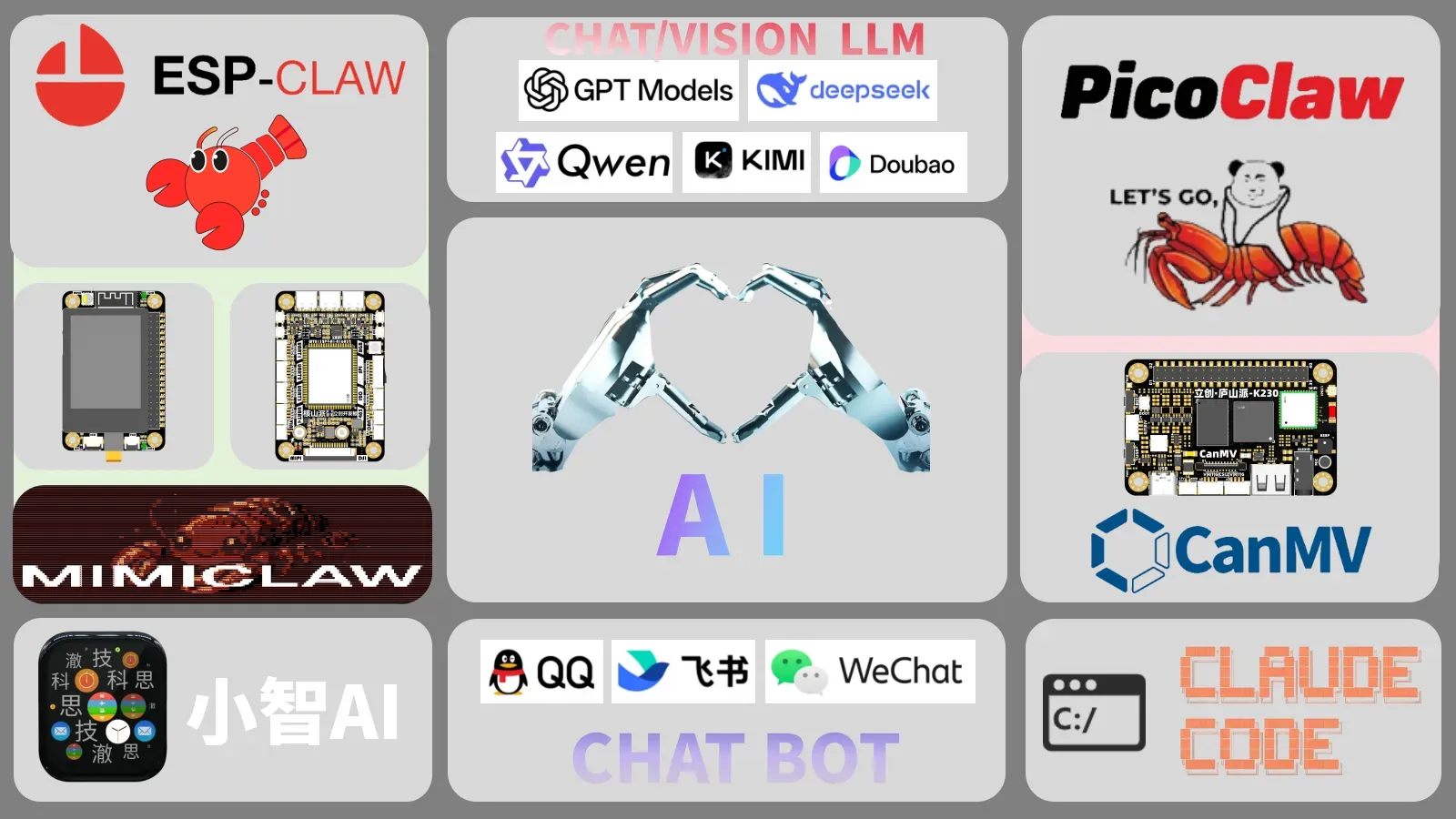
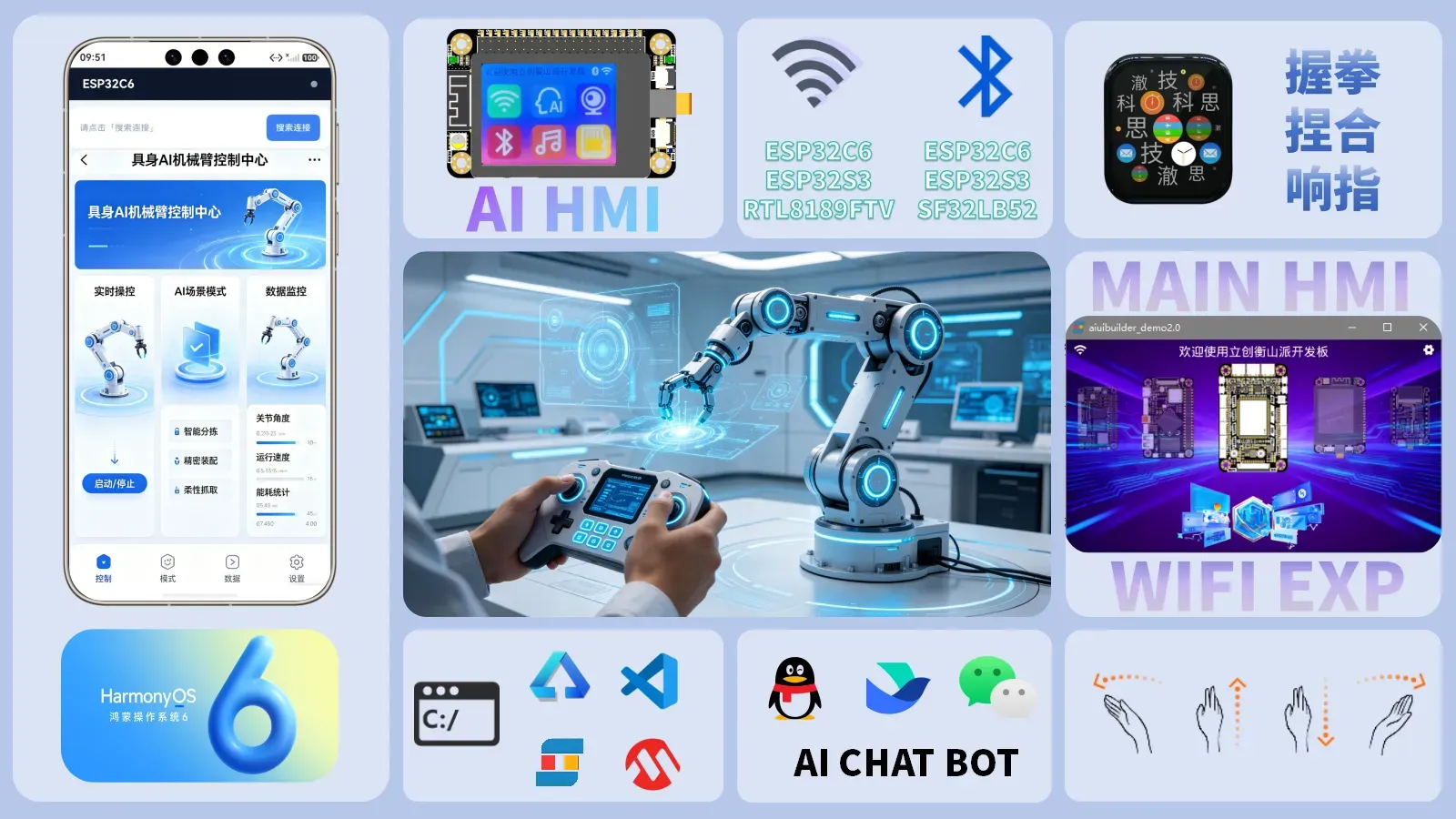
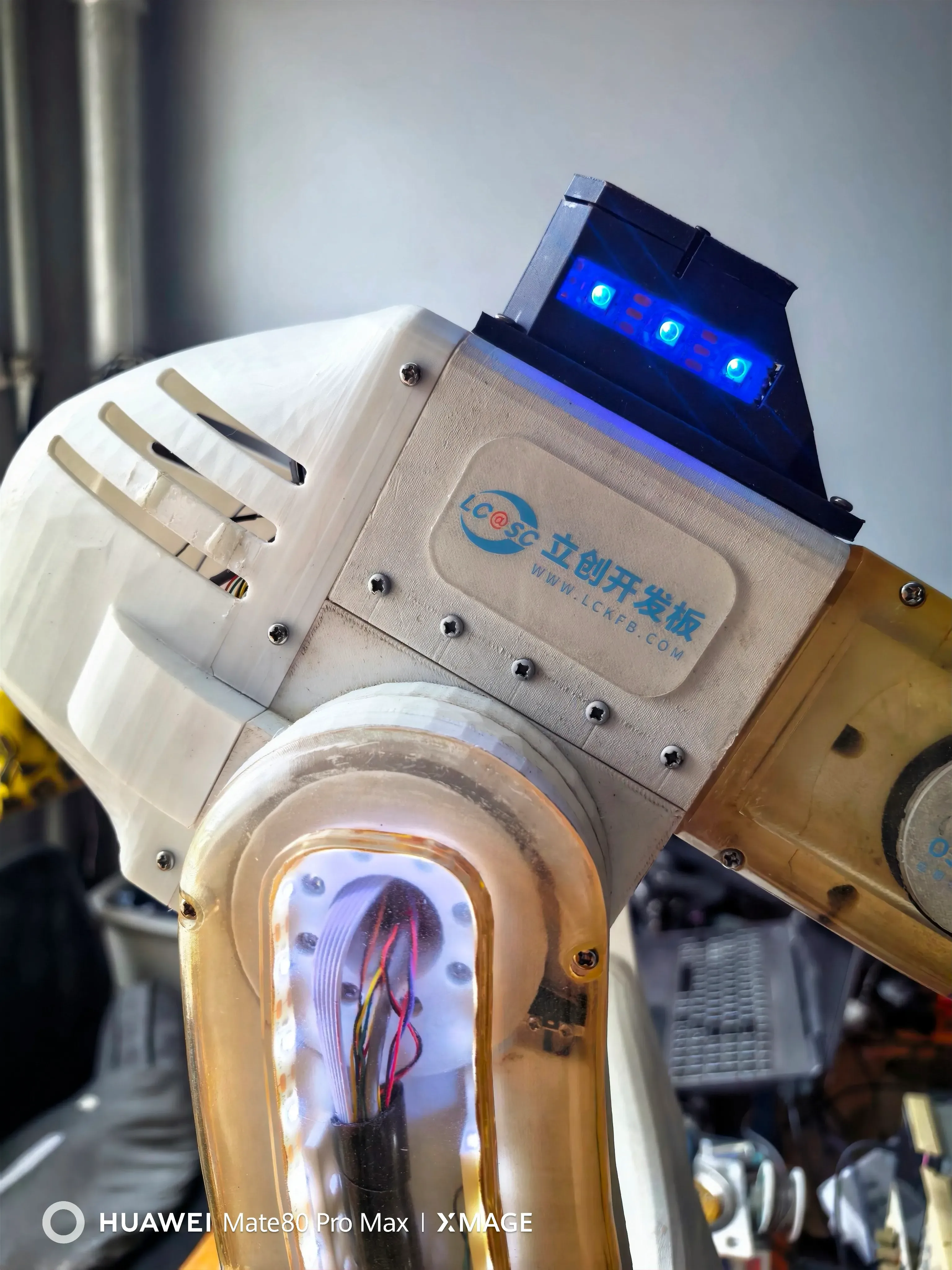
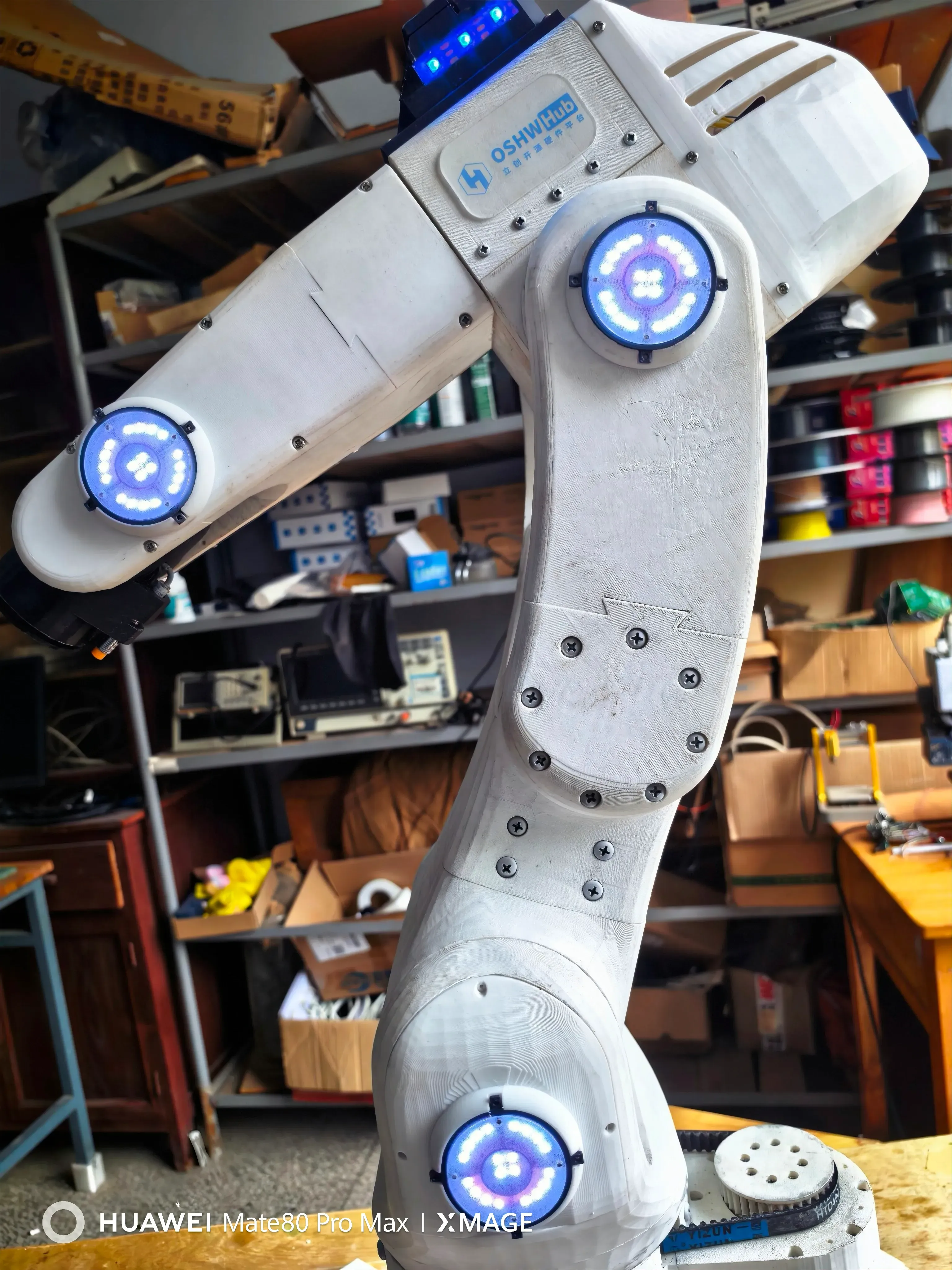
基于3D结构设计的摆线针轮减速器配合步进电机的六轴机械臂,具有“全栈集成”和“多模态交互”核心优势,可作为多才多艺的、能与人自然沟通和协作的具身智能“伙伴”——桌面AI助手机械臂。
简介:基于3D结构设计的摆线针轮减速器配合步进电机的六轴机械臂,具有“全栈集成”和“多模态交互”核心优势,可作为多才多艺的、能与人自然沟通和协作的具身智能“伙伴”——桌面AI助手机械臂。复刻成本:¥2000
开源协议
:GPL 3.0
(未经作者授权,禁止转载)创建时间:2026-05-01 05:35:12更新时间:2026-05-04 21:14:18
描述

项目介绍👾
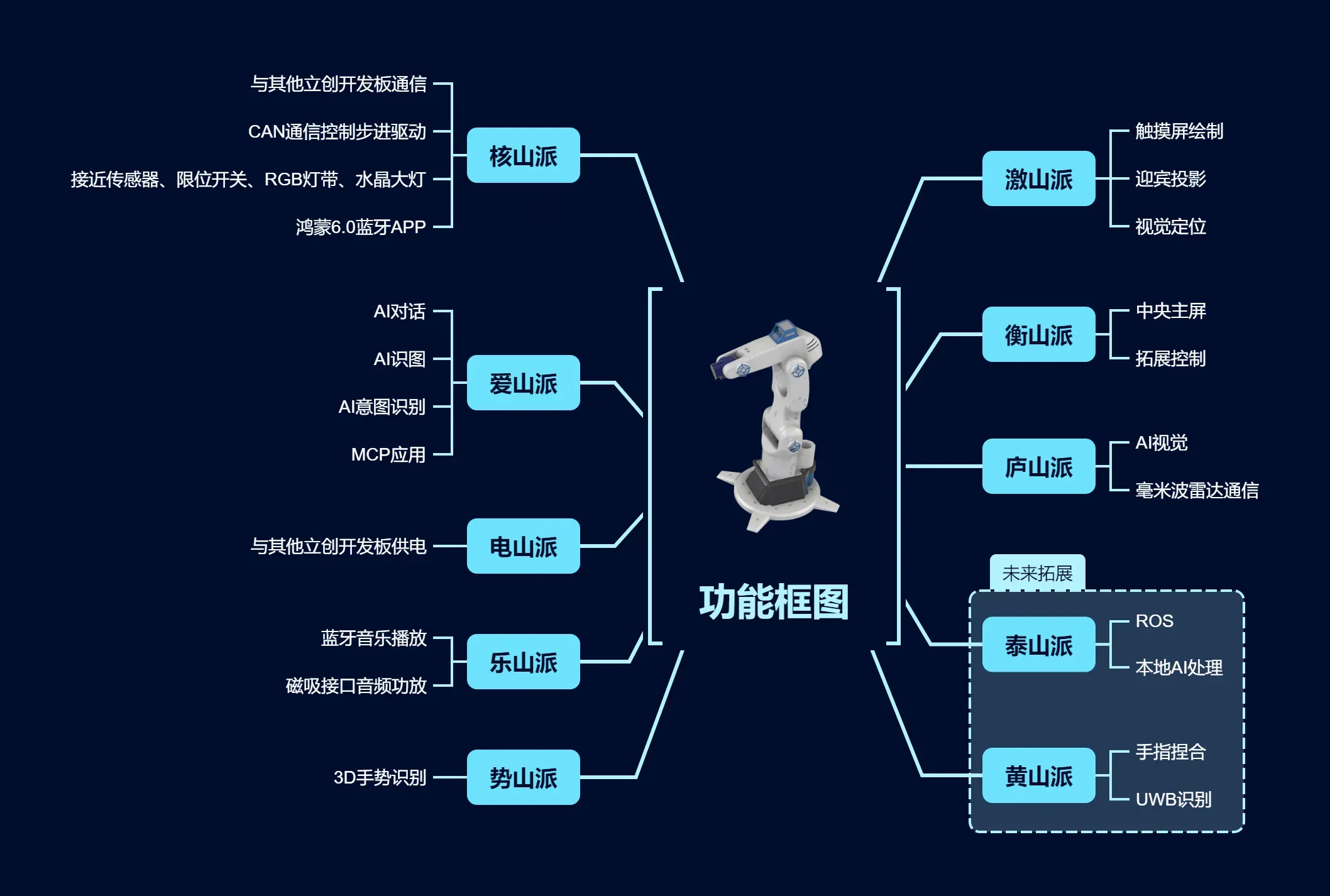
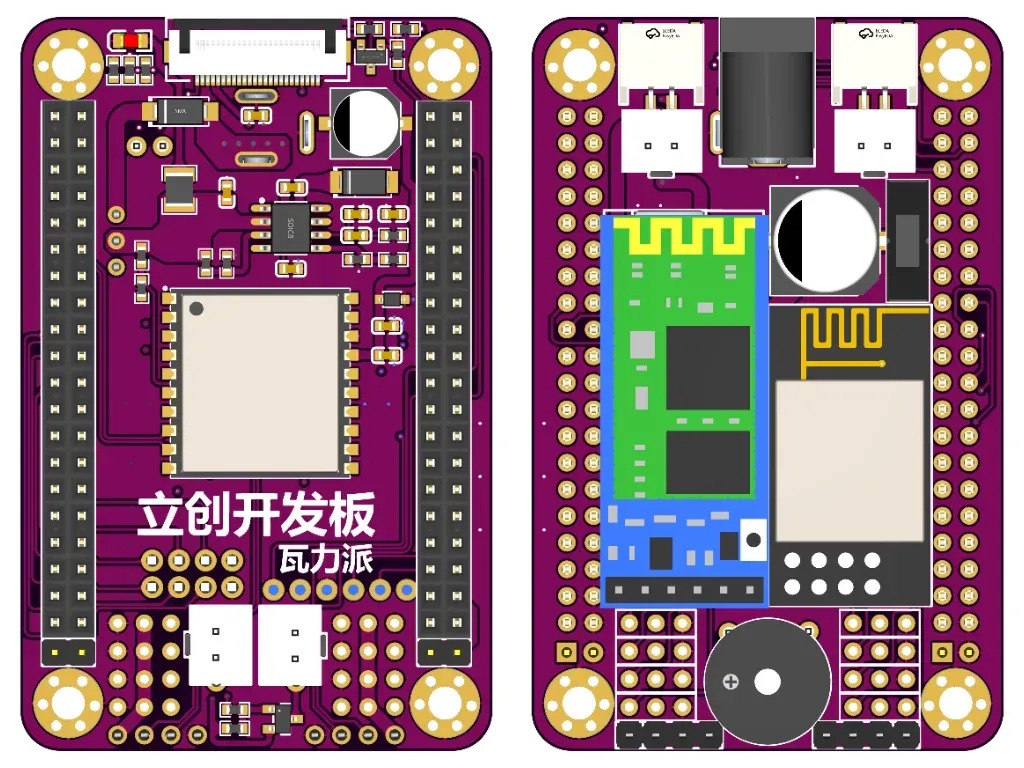
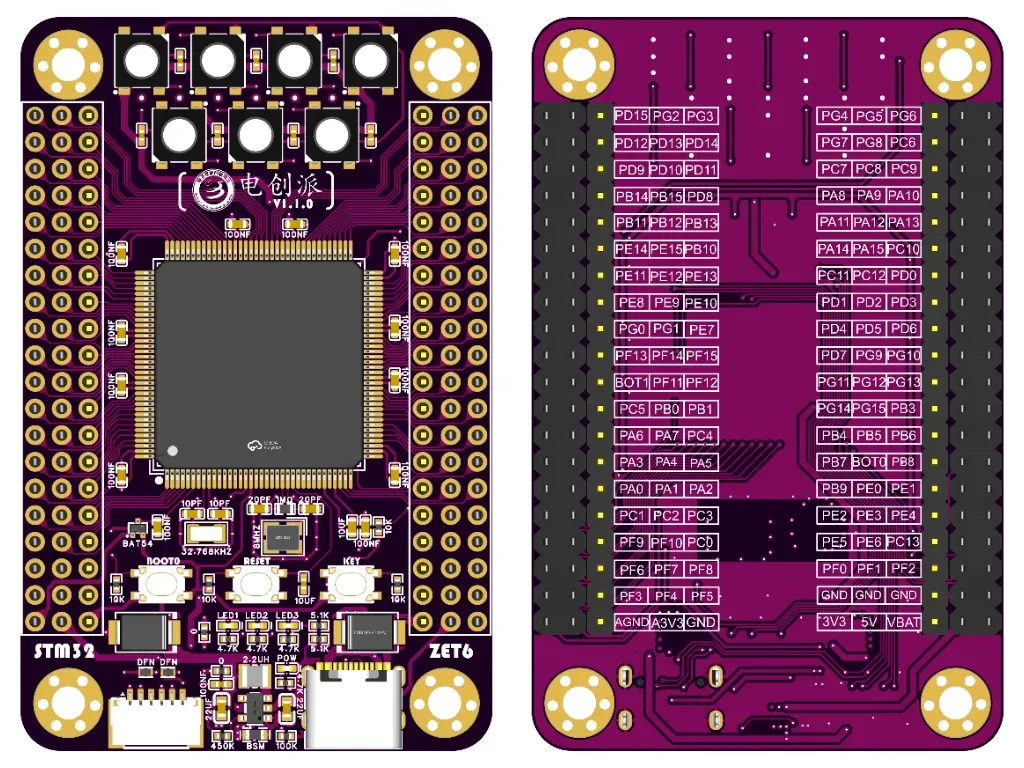
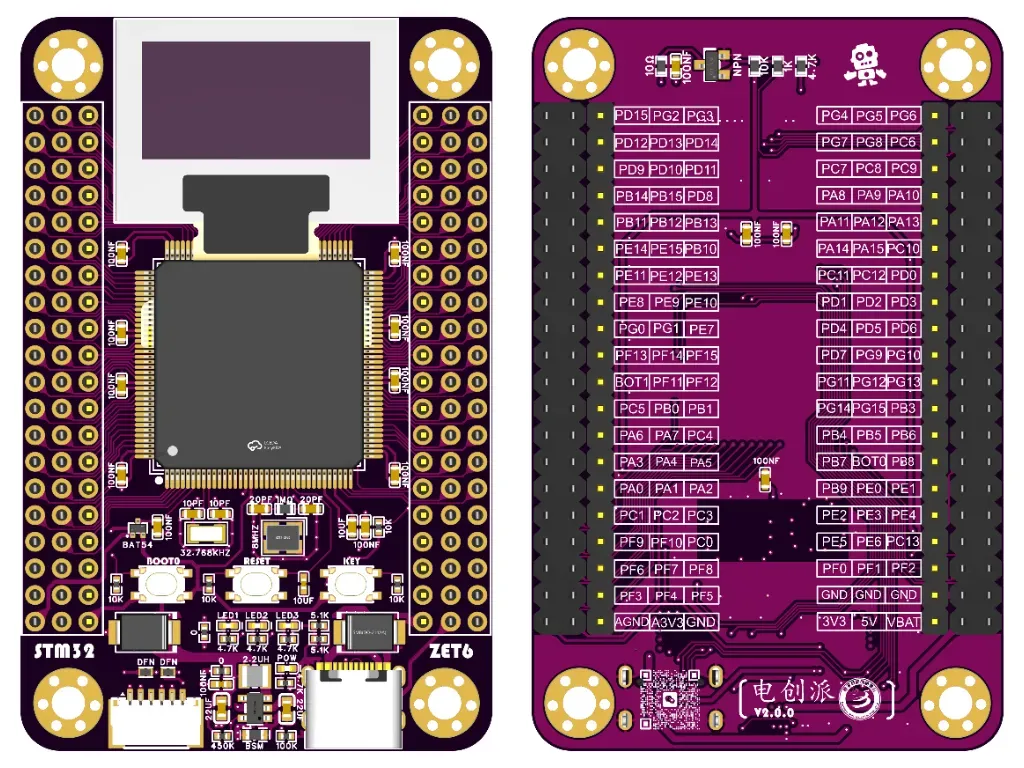
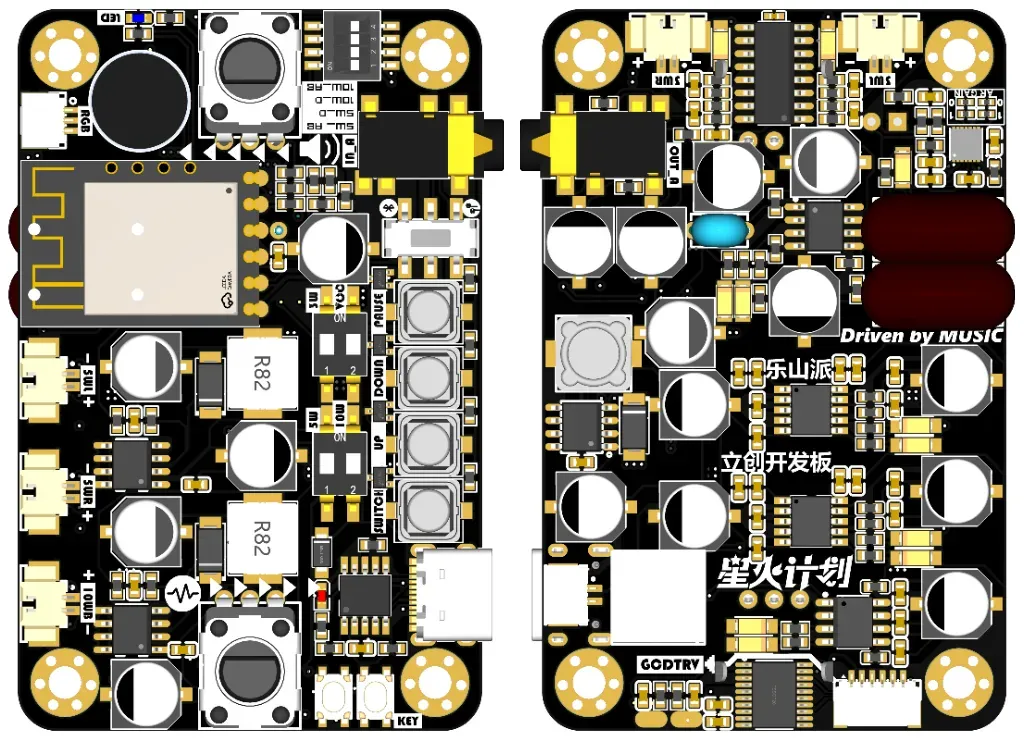
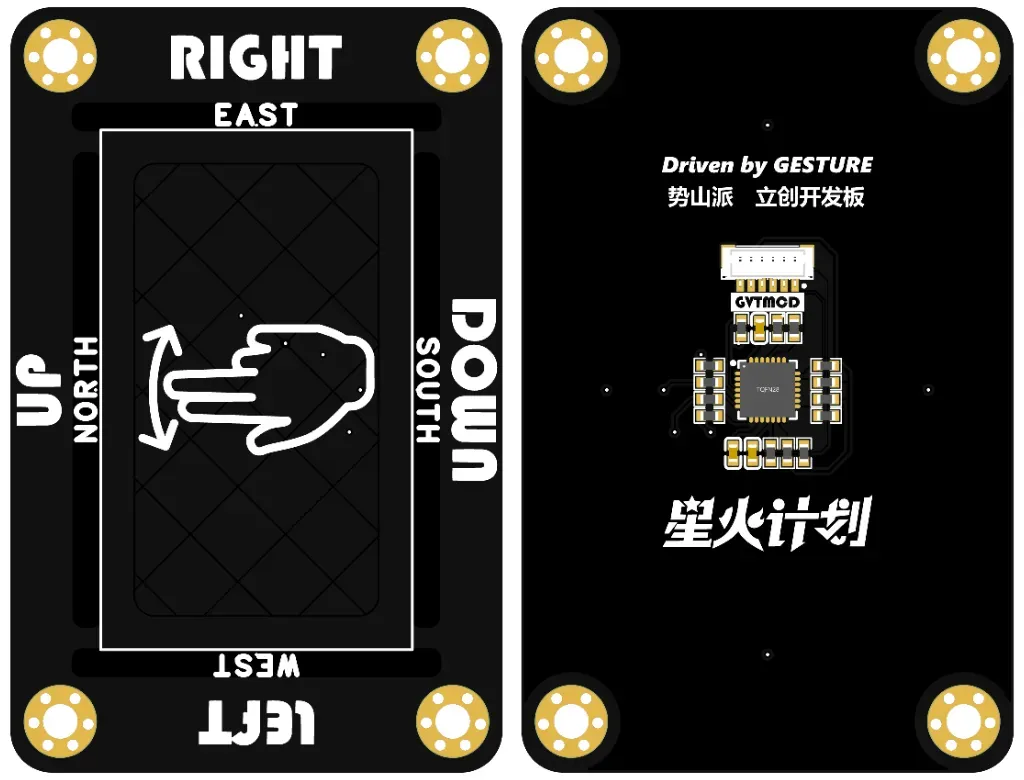
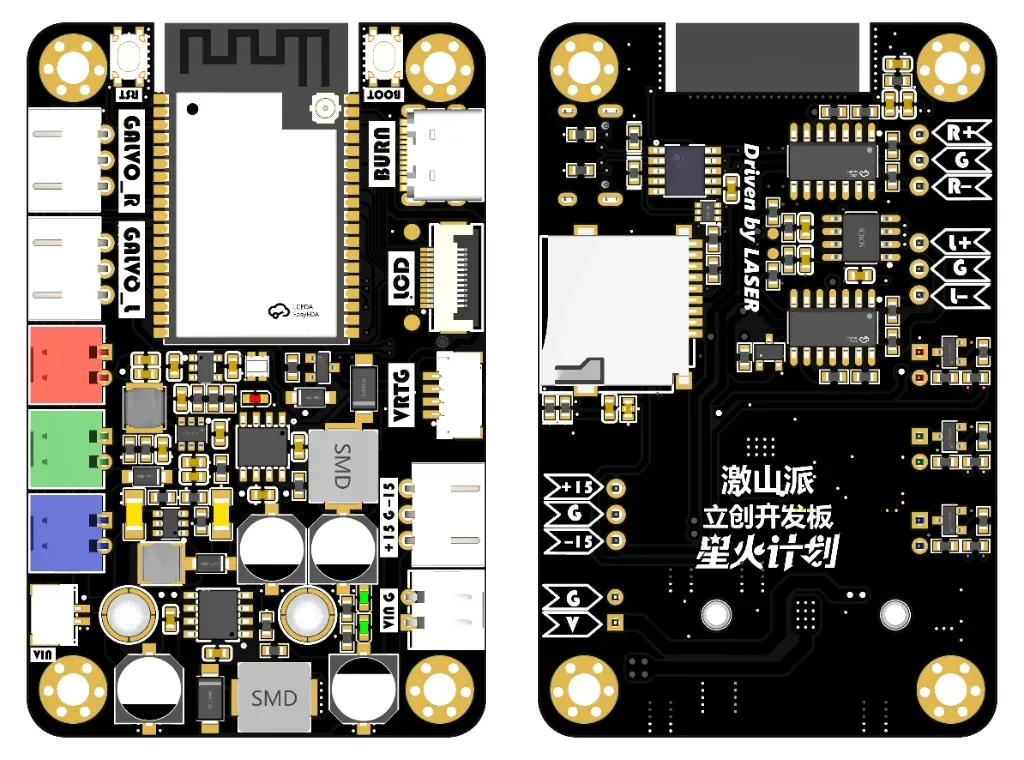
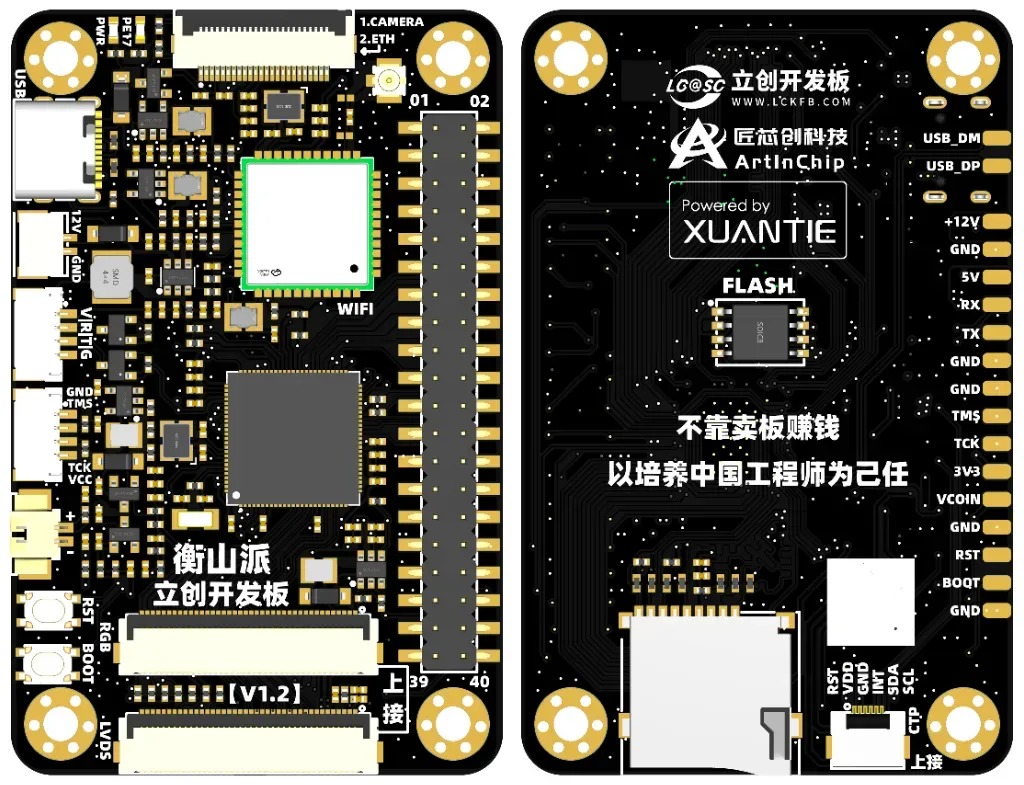
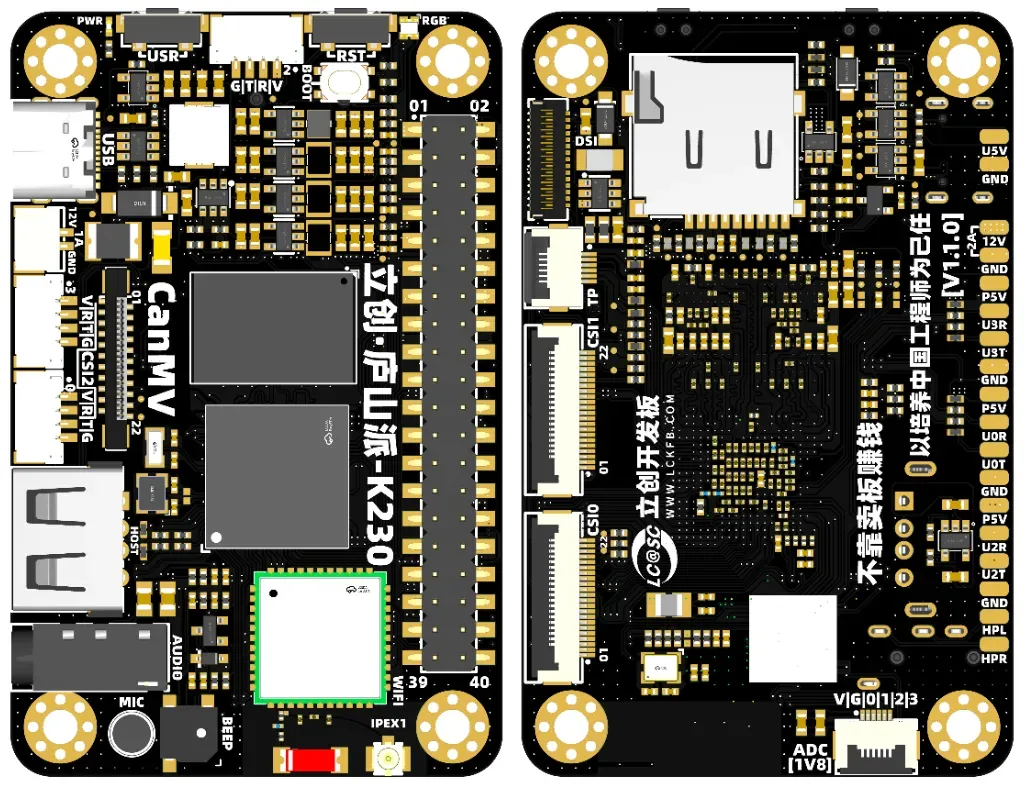
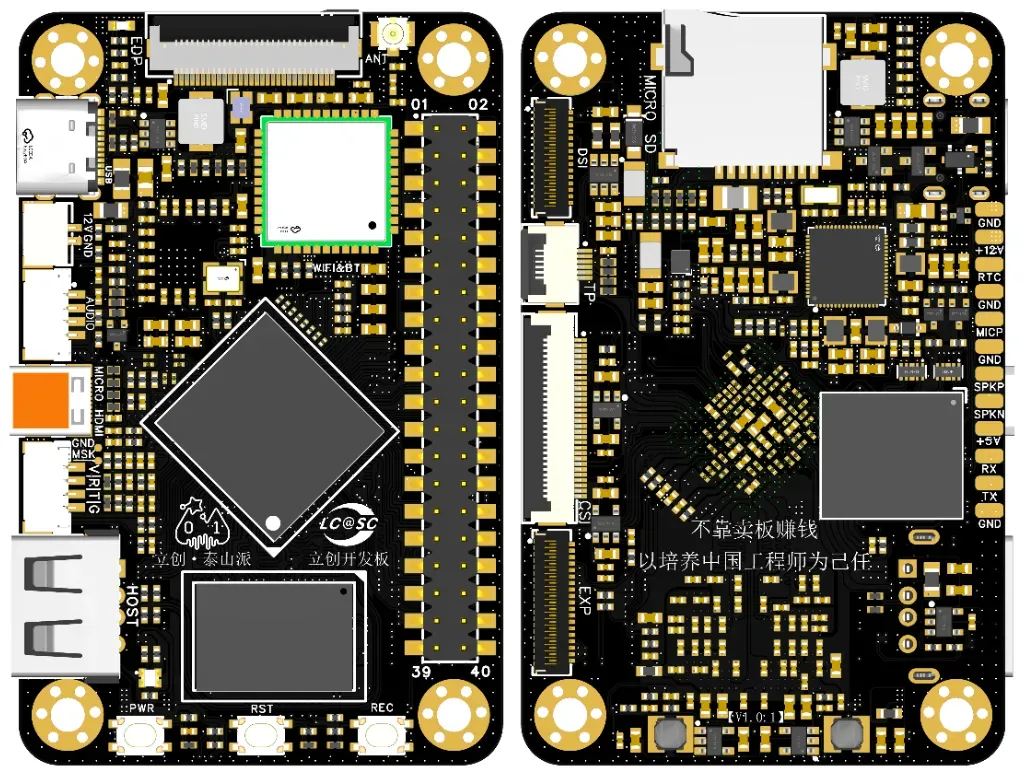
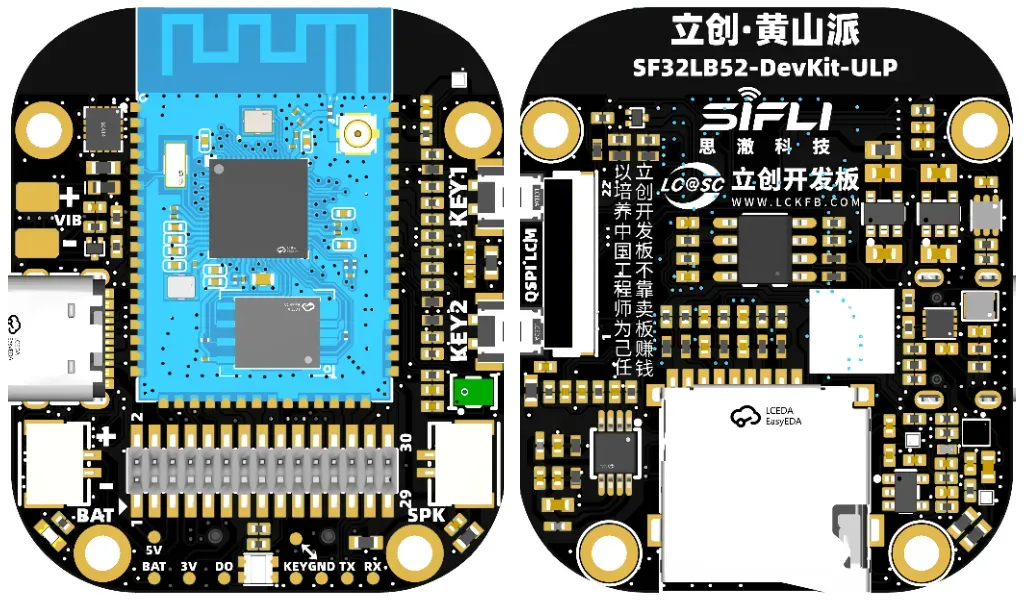
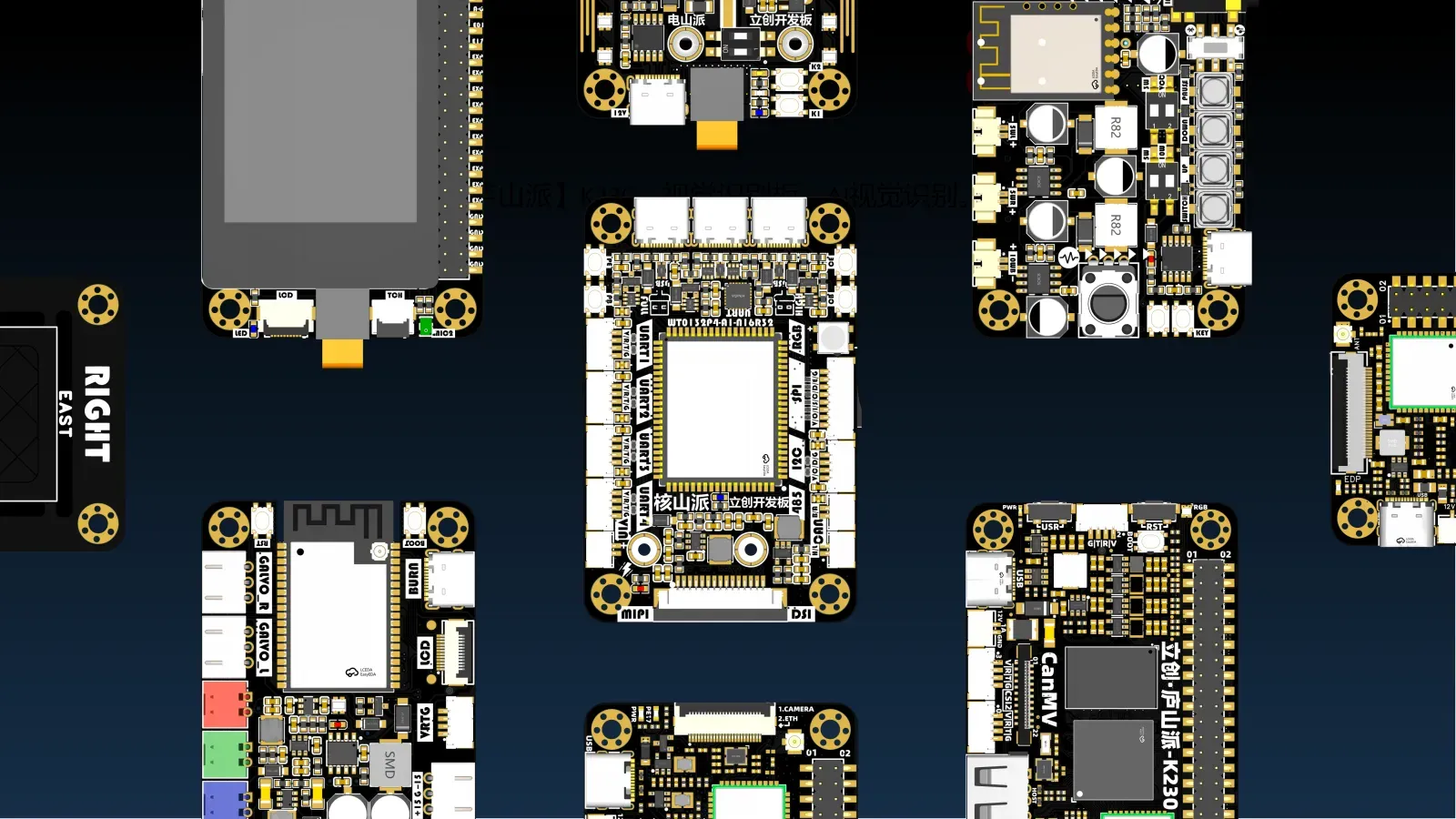
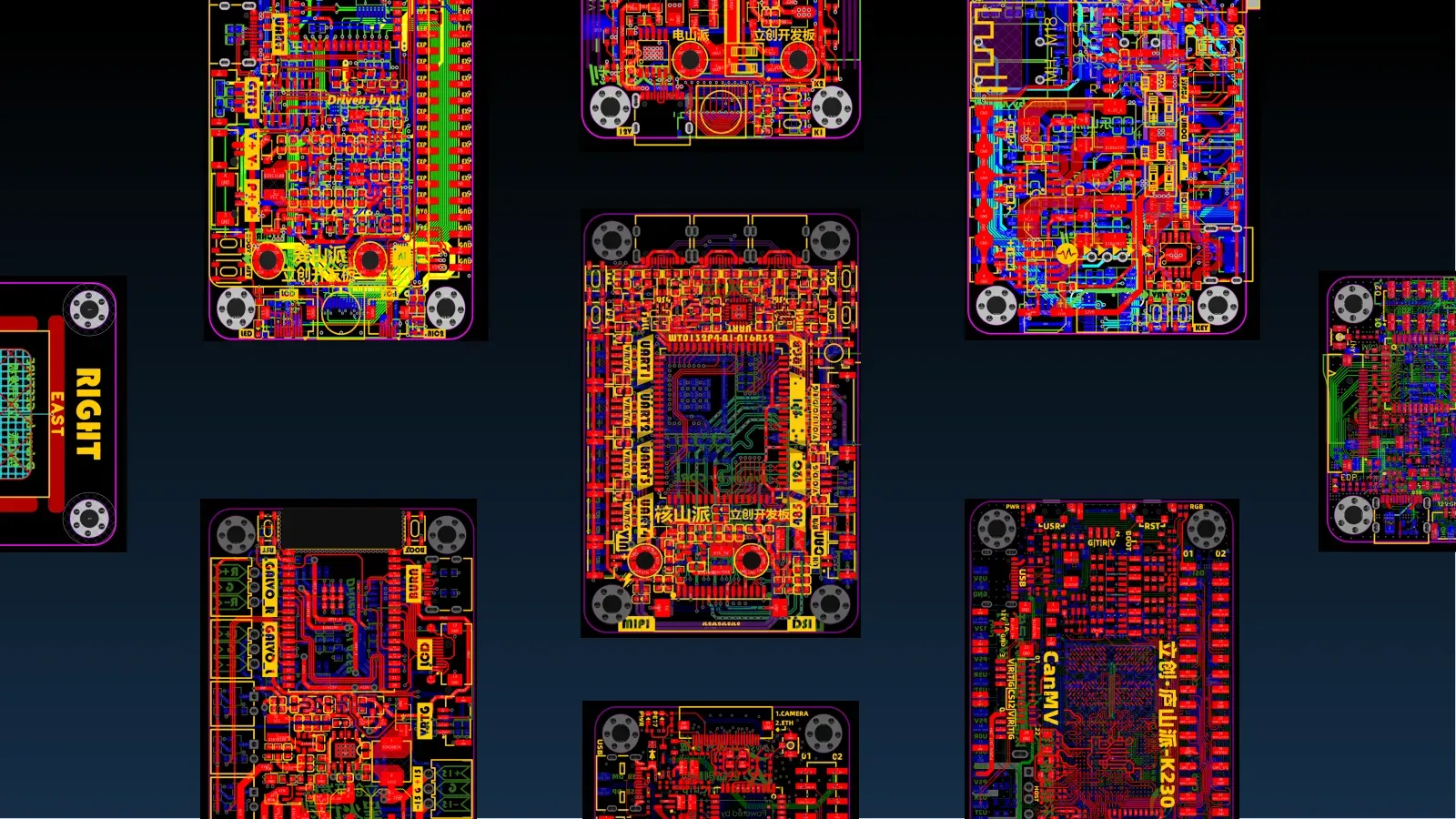
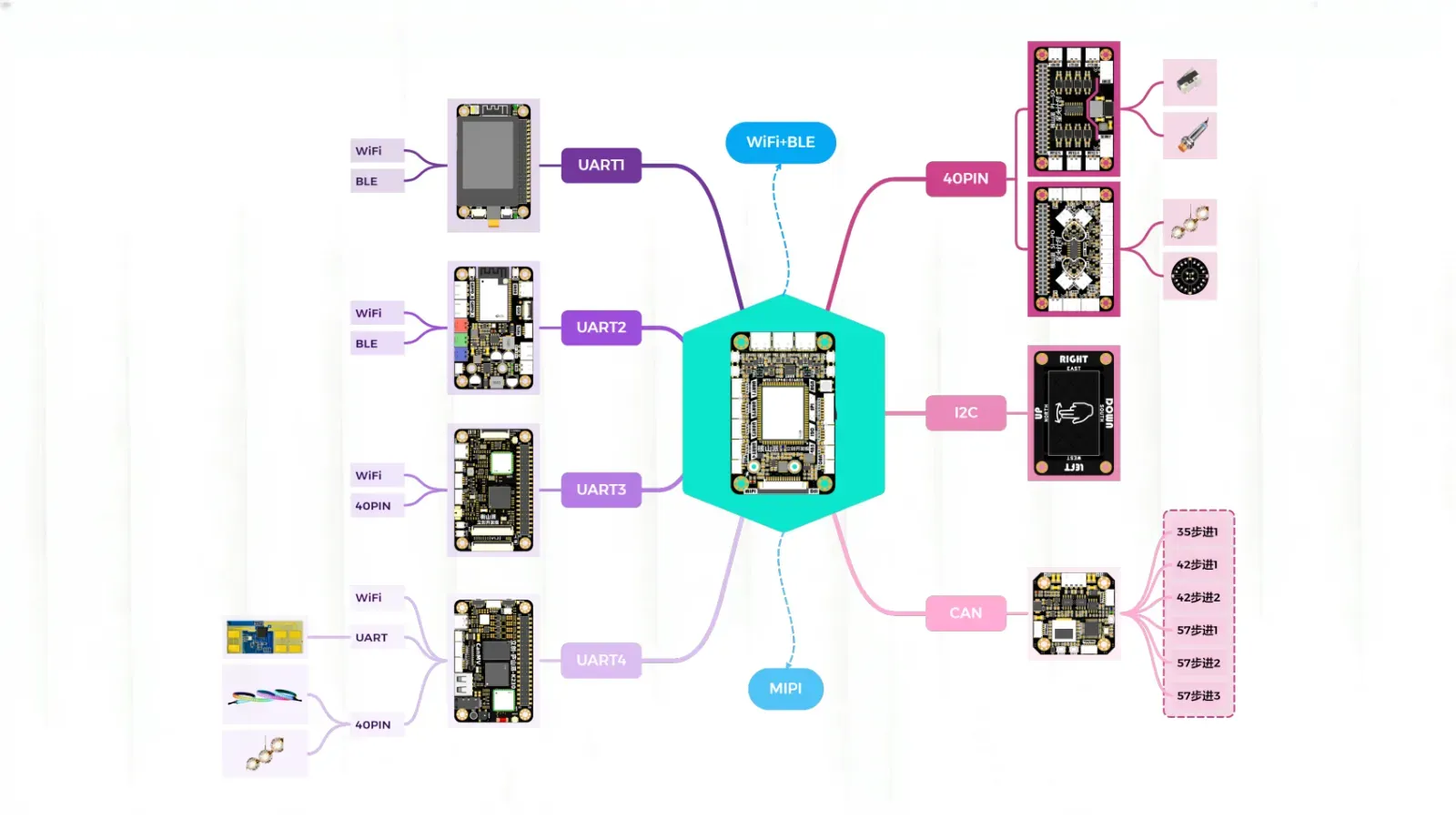
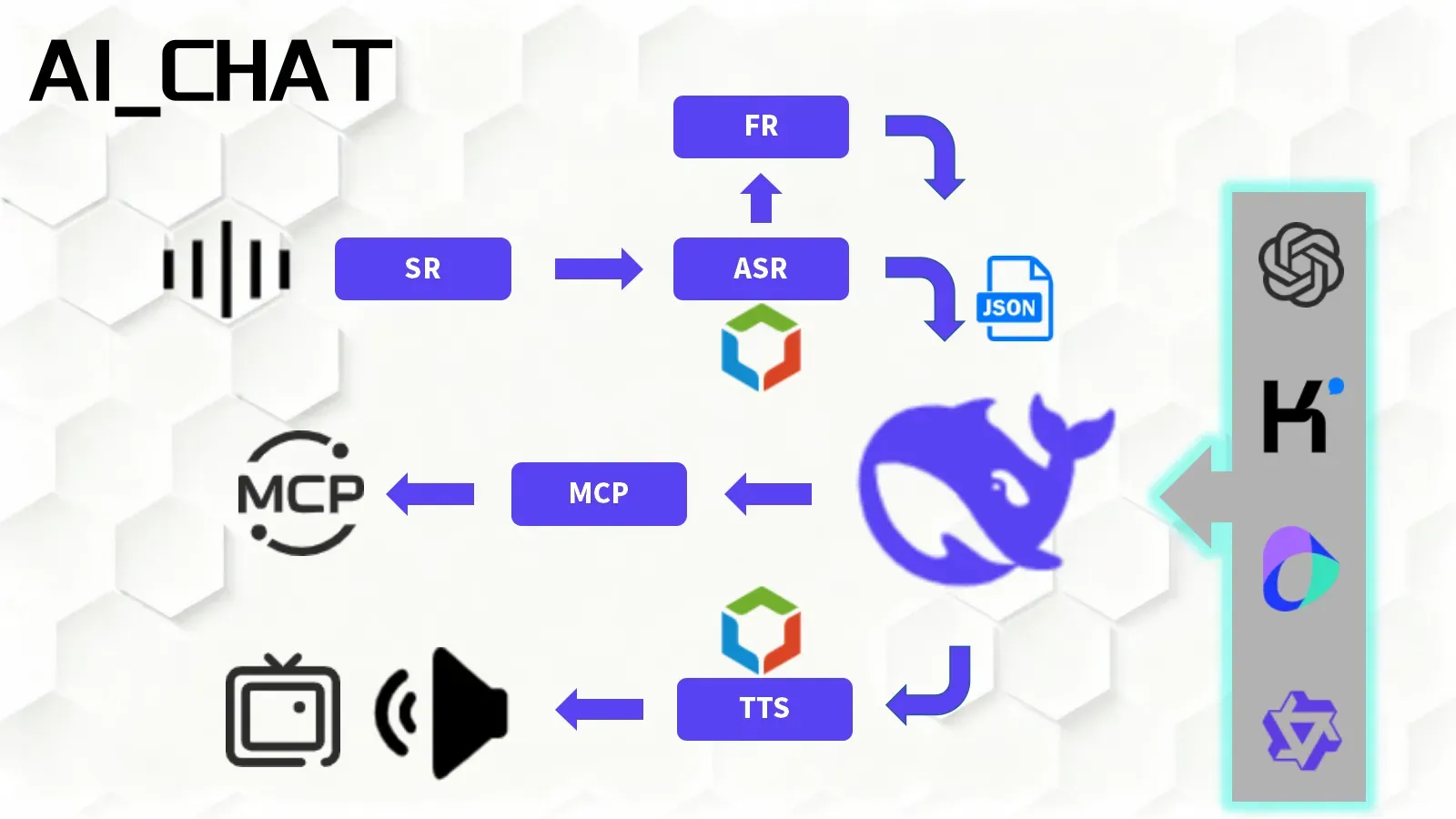
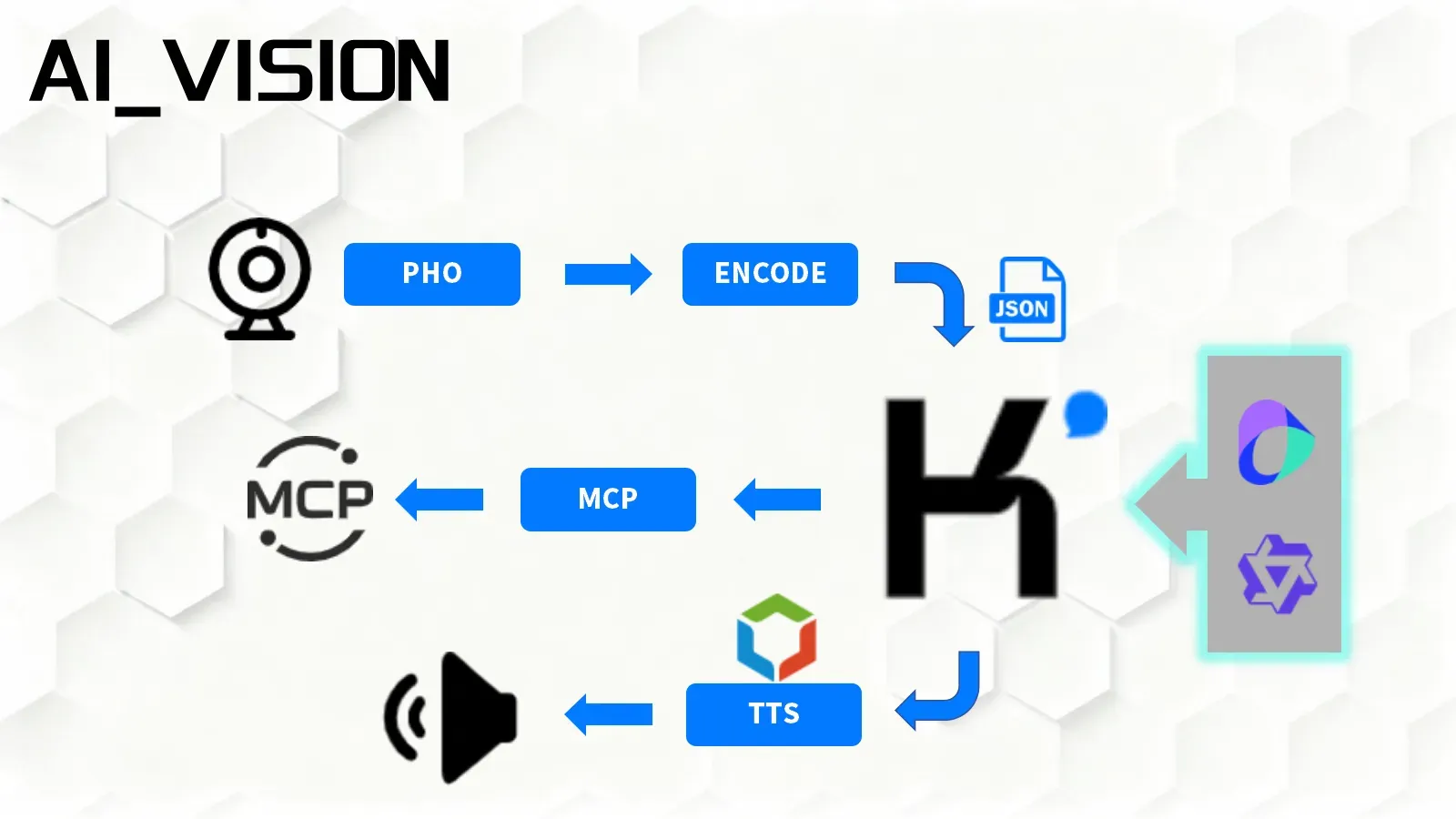
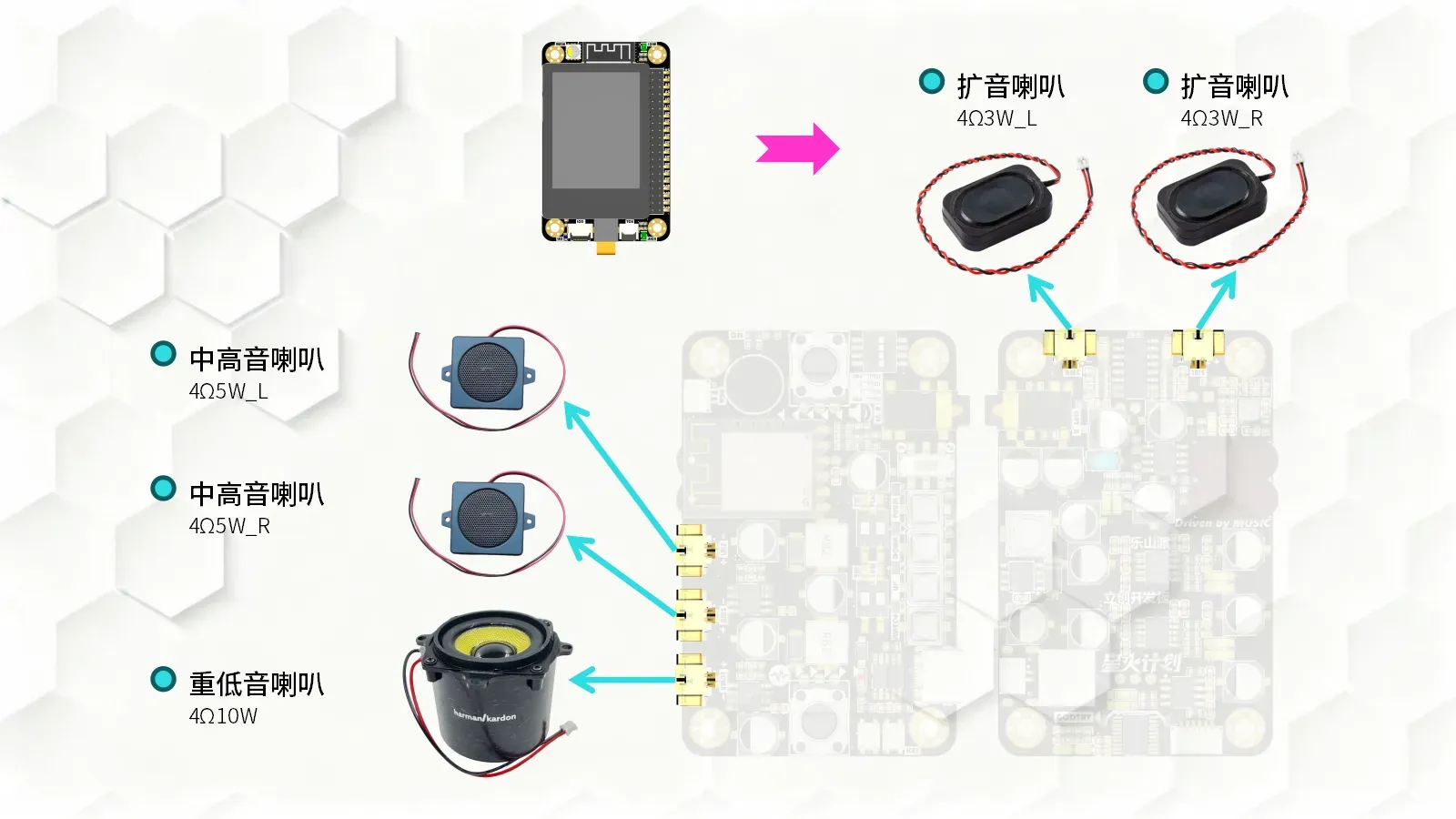
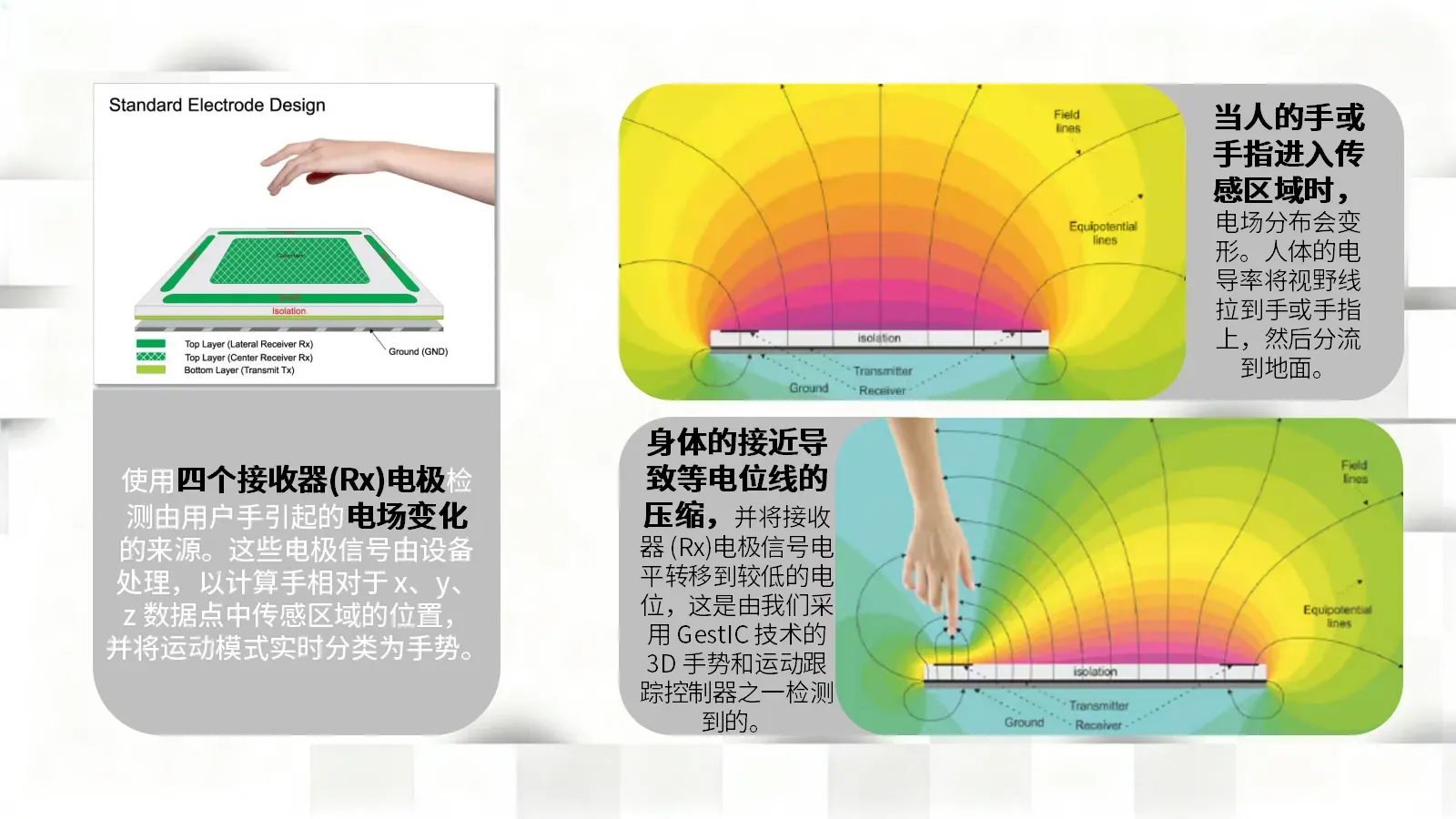
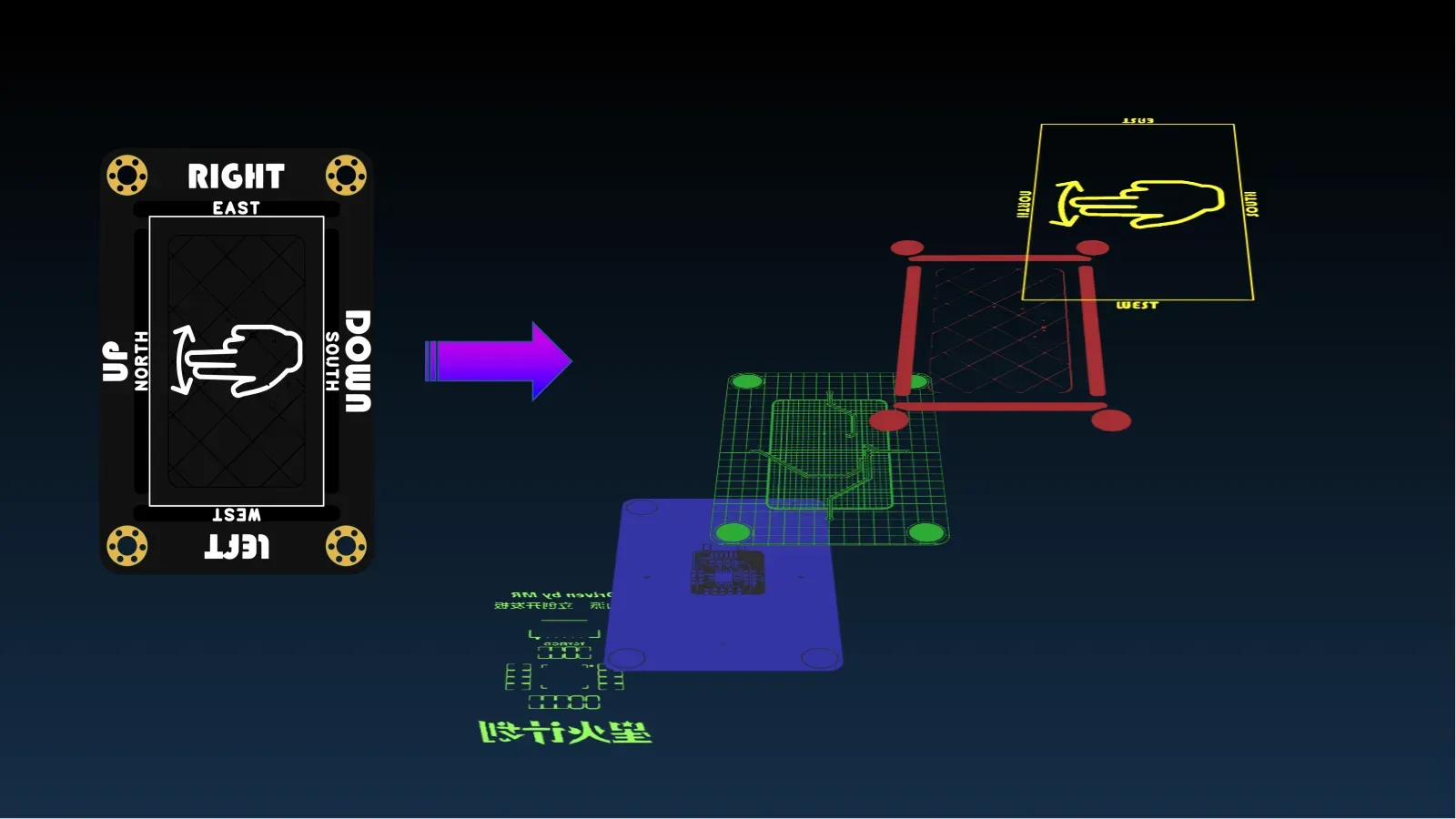
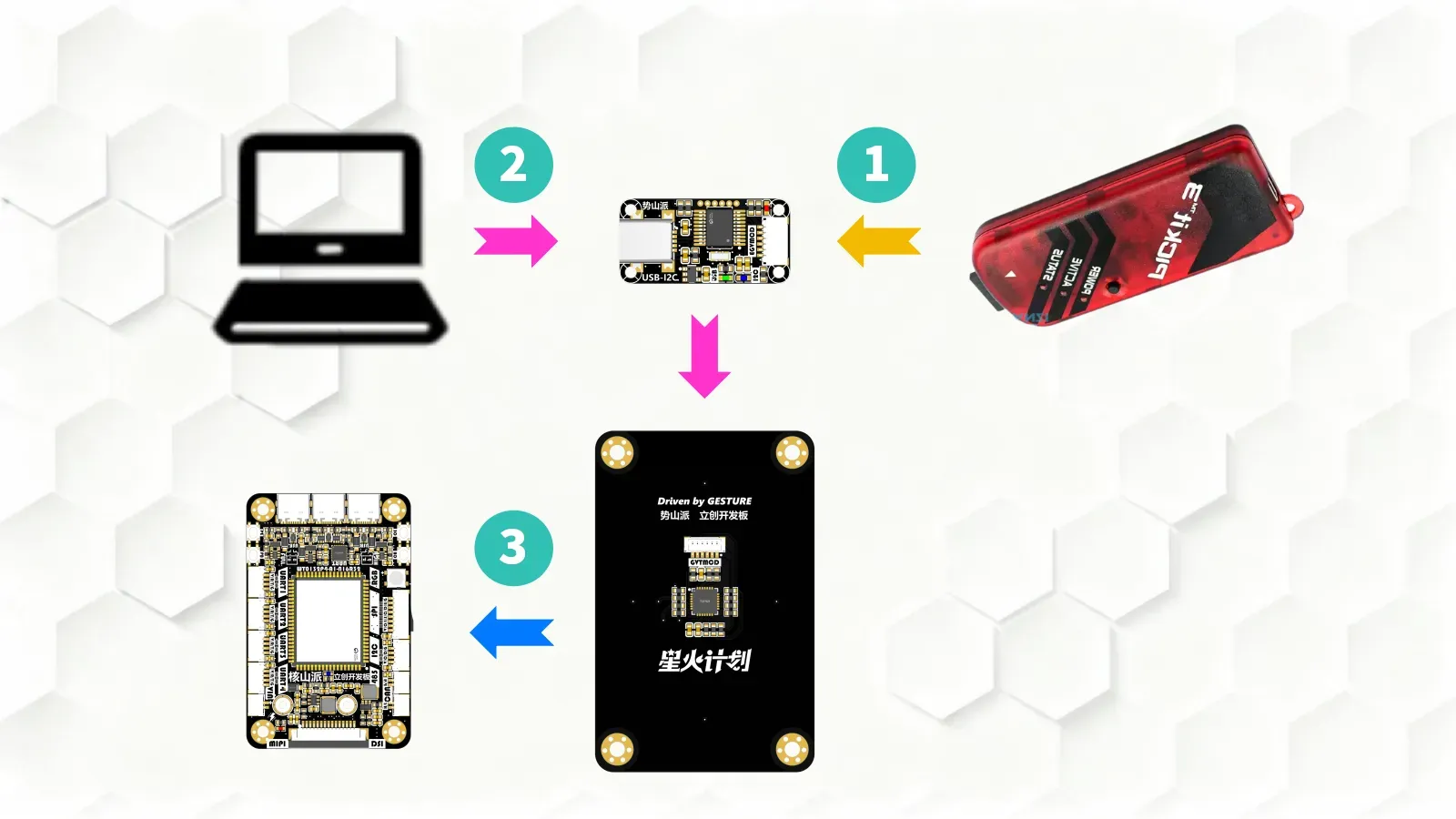
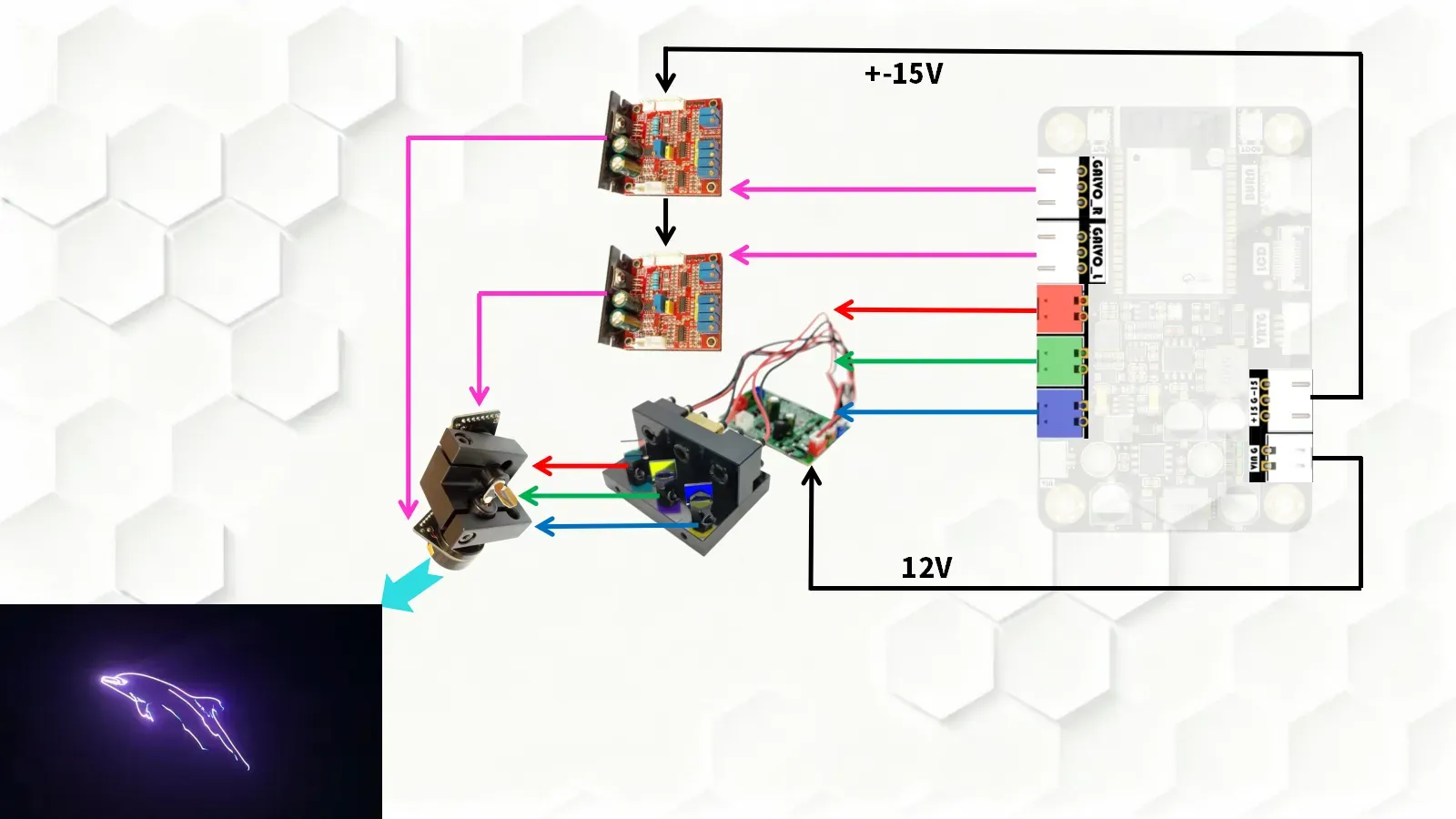
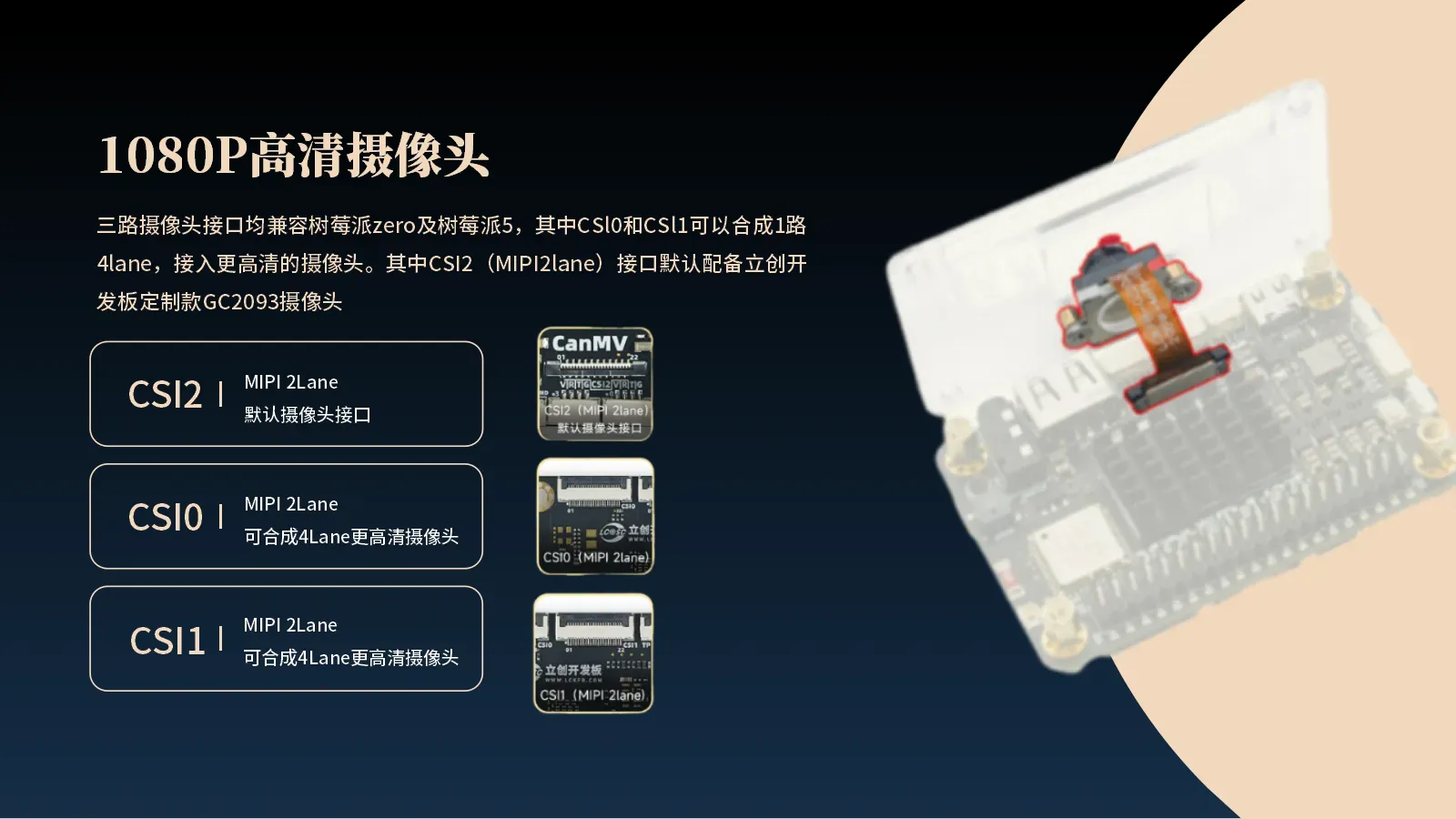
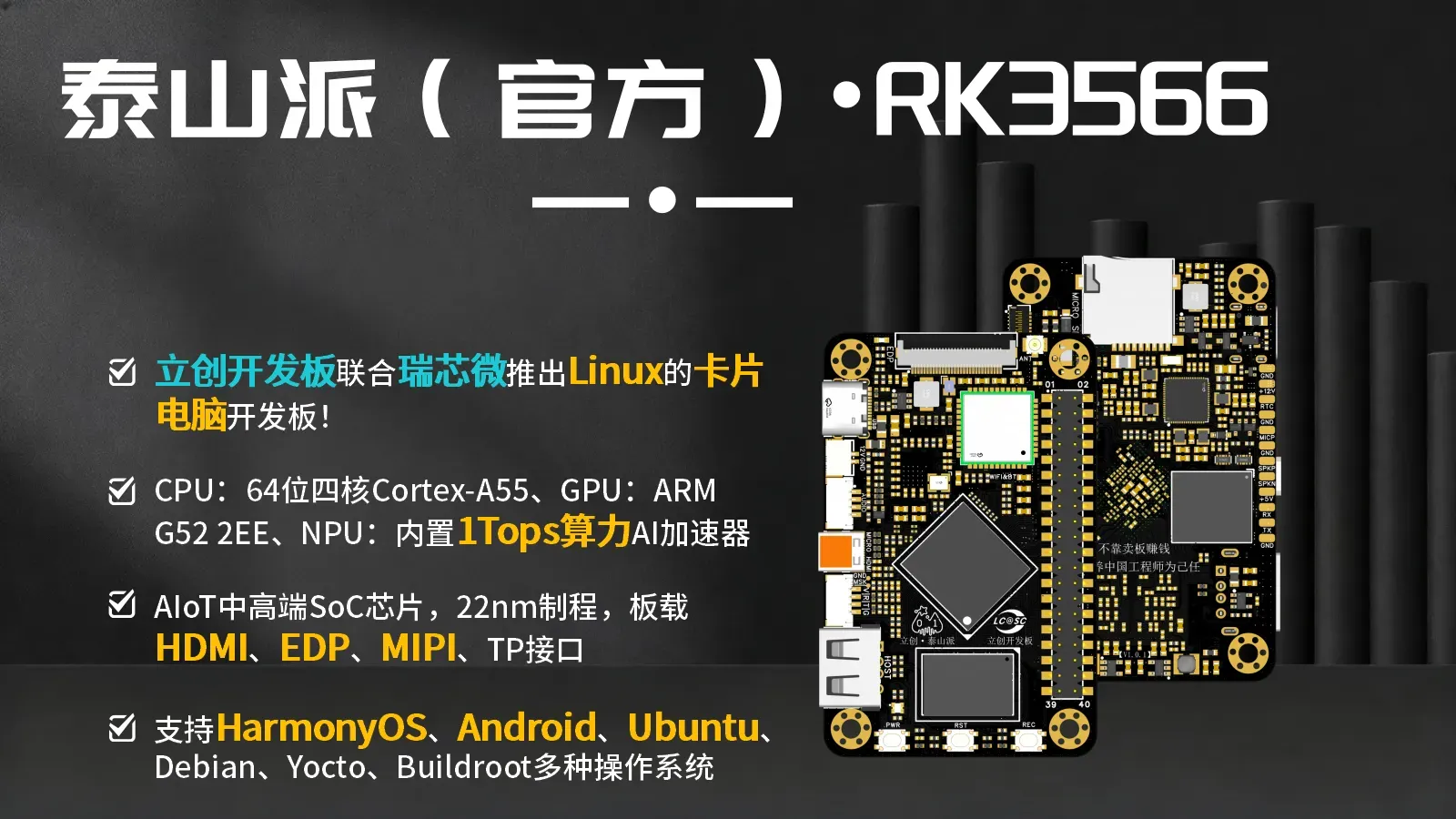
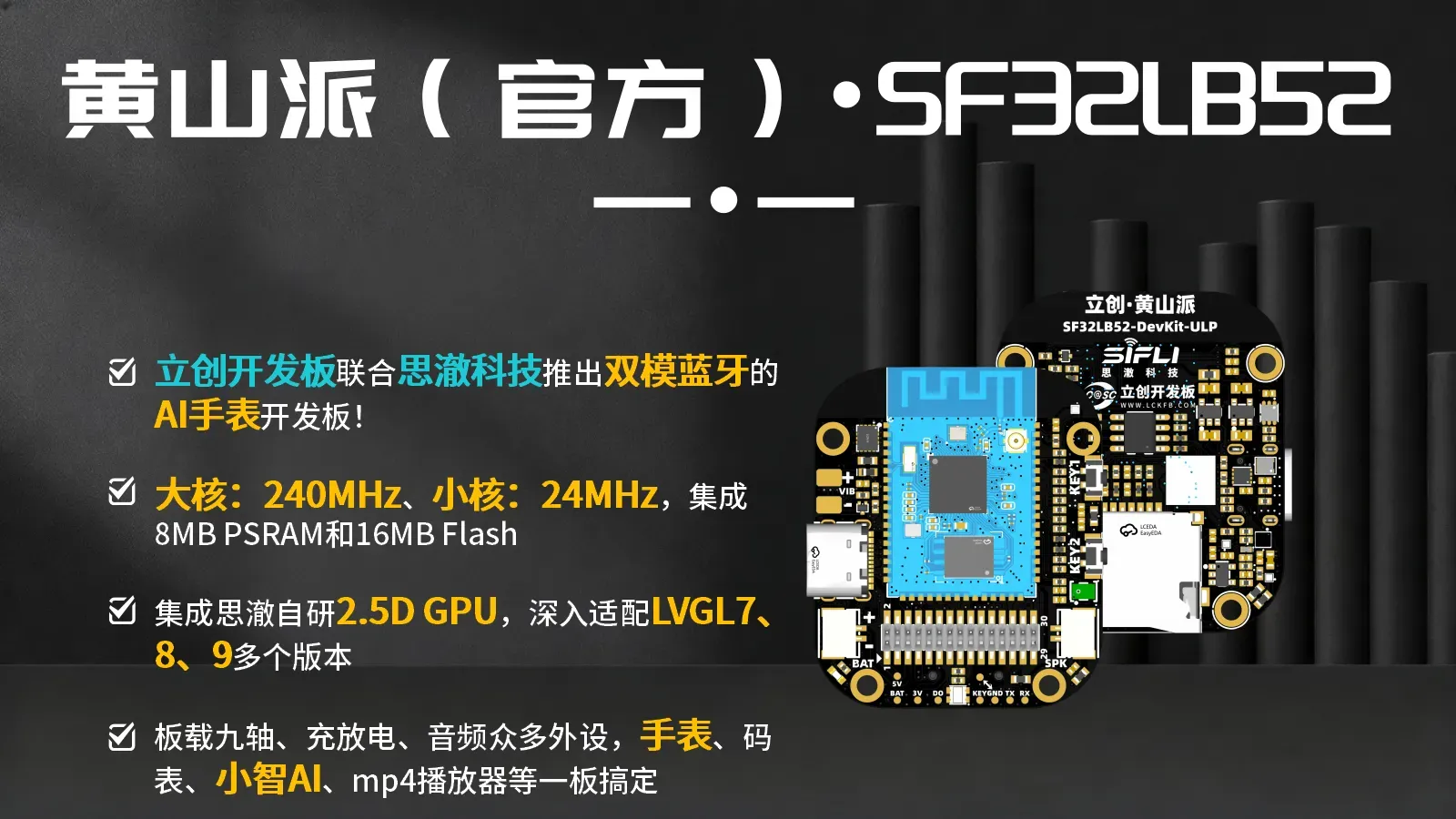
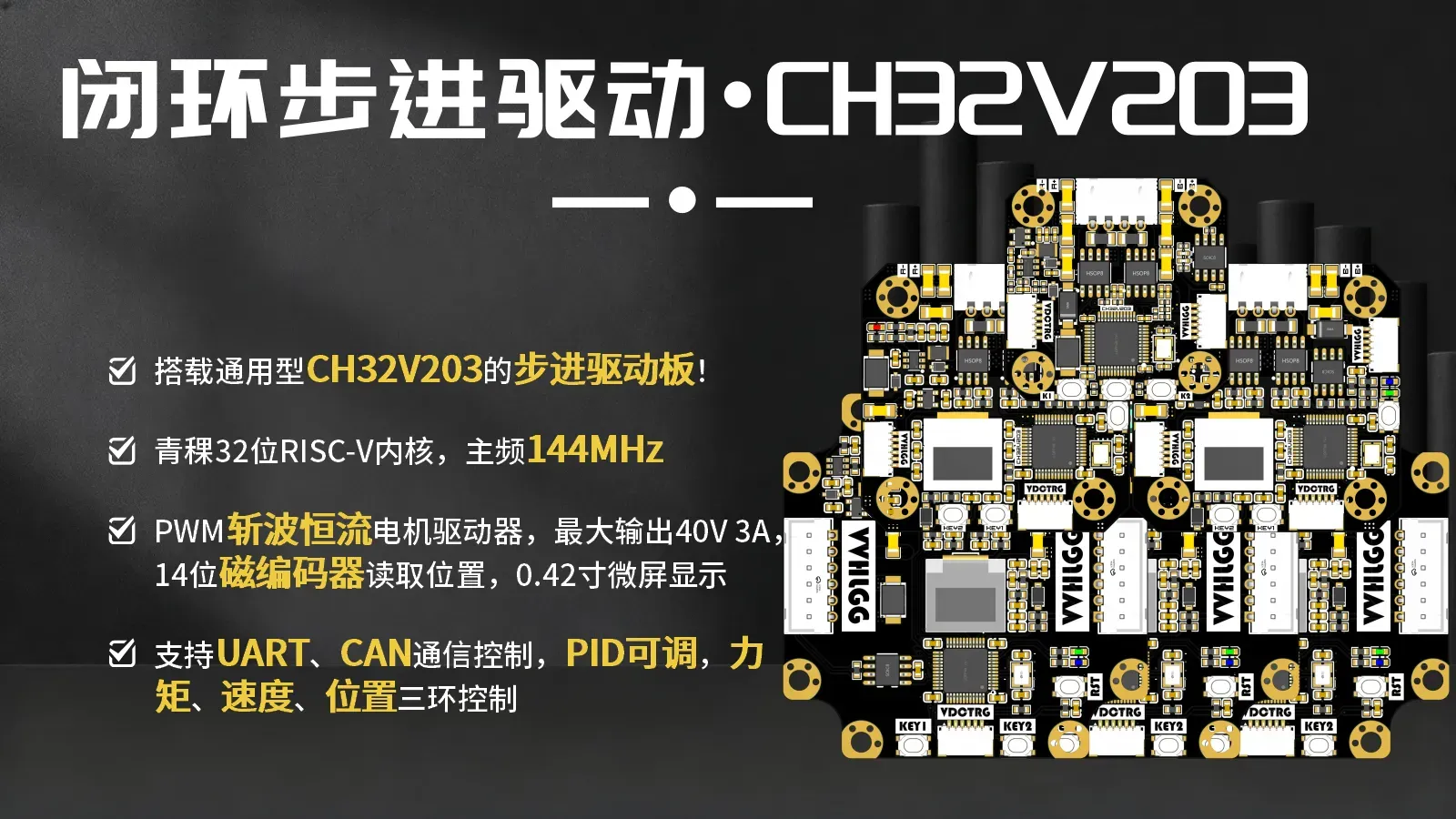
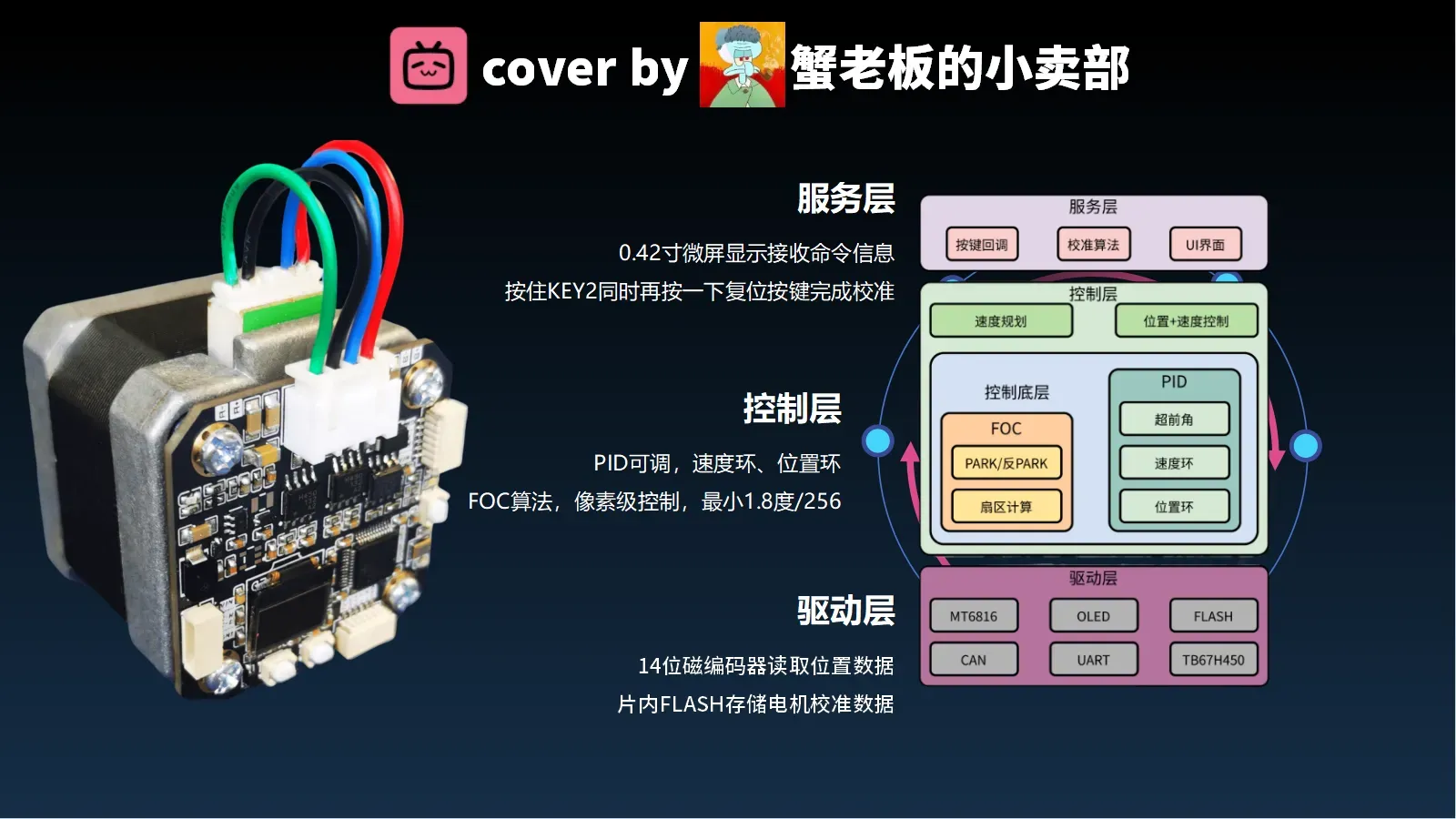
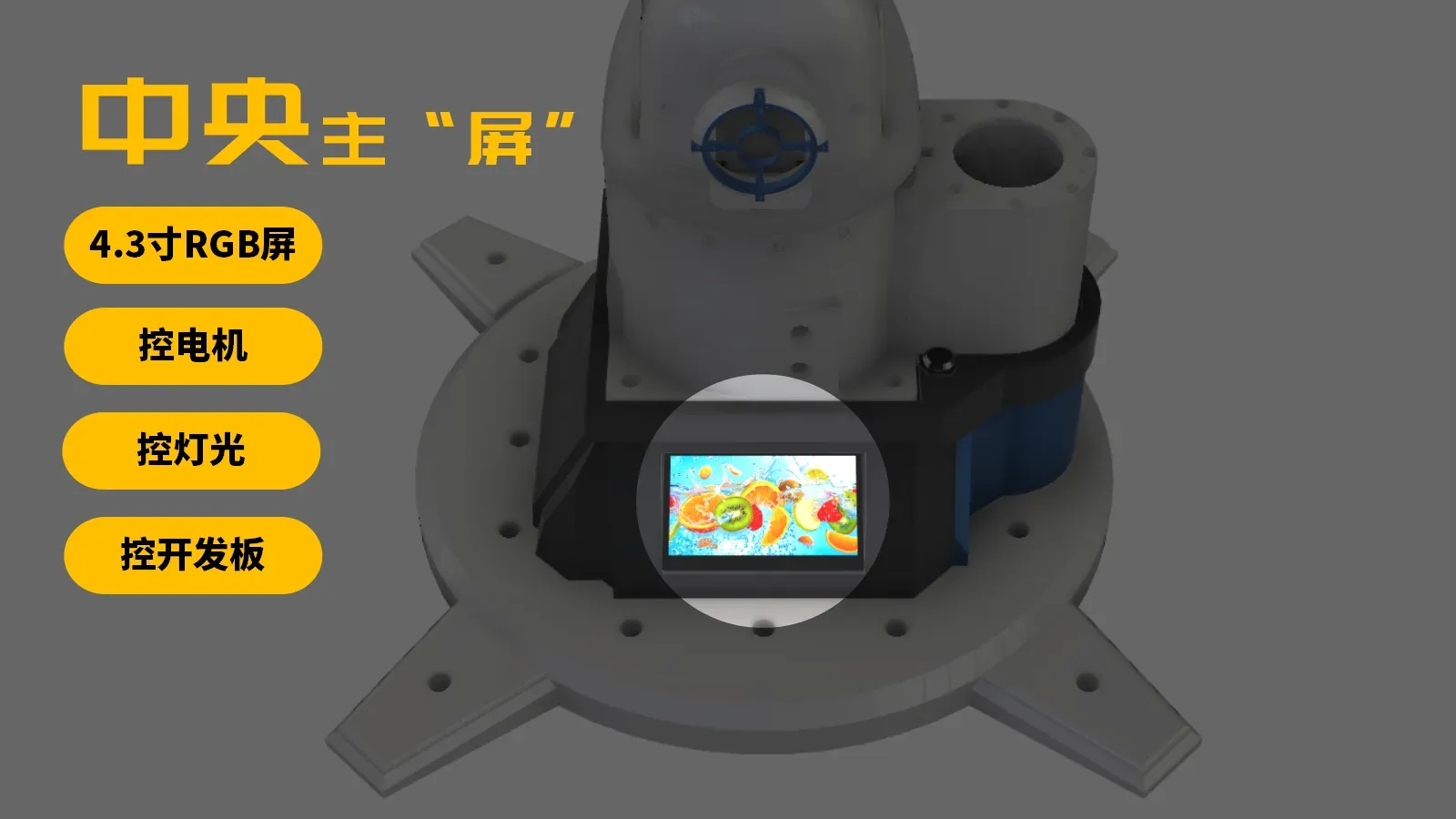
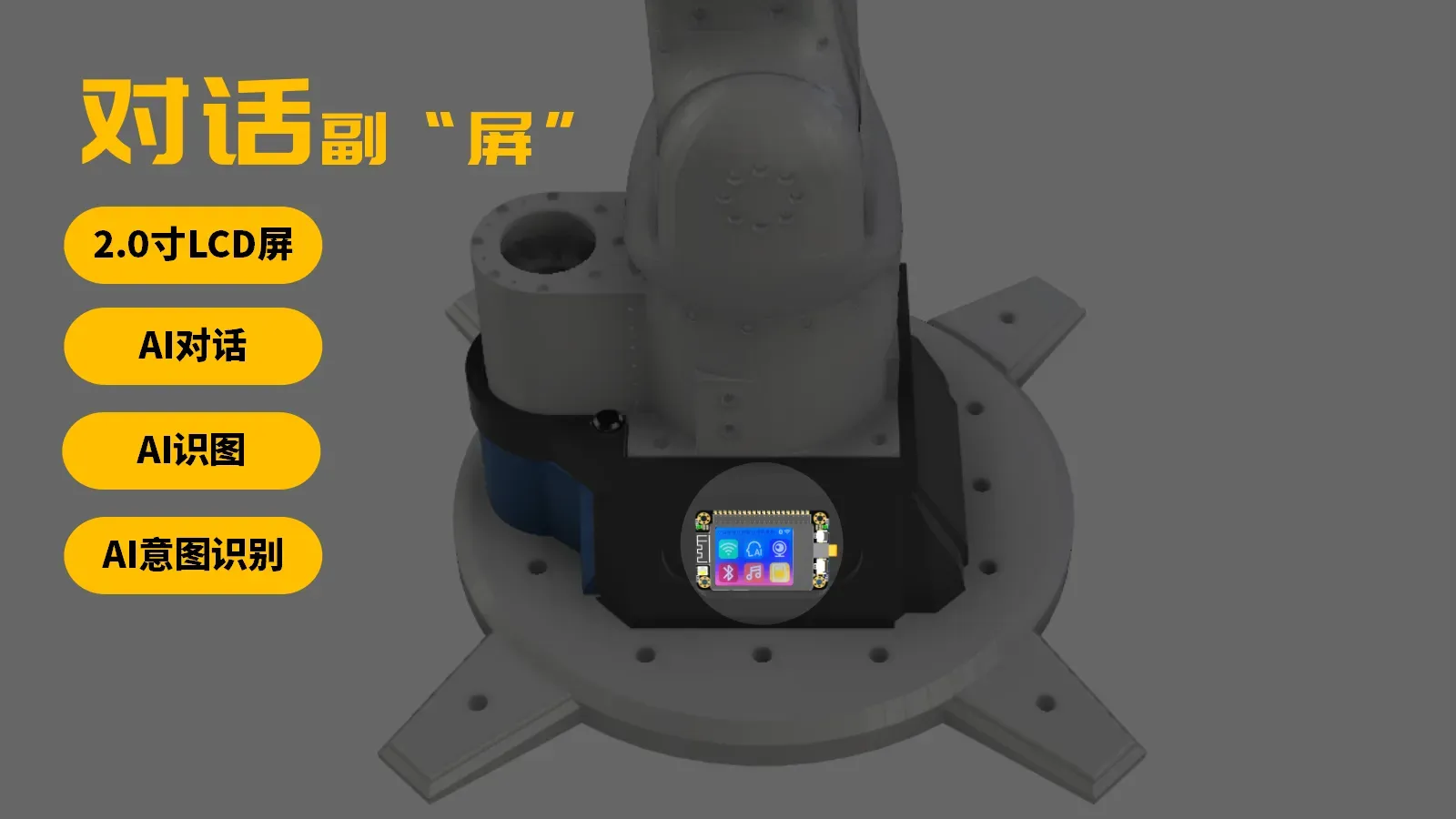
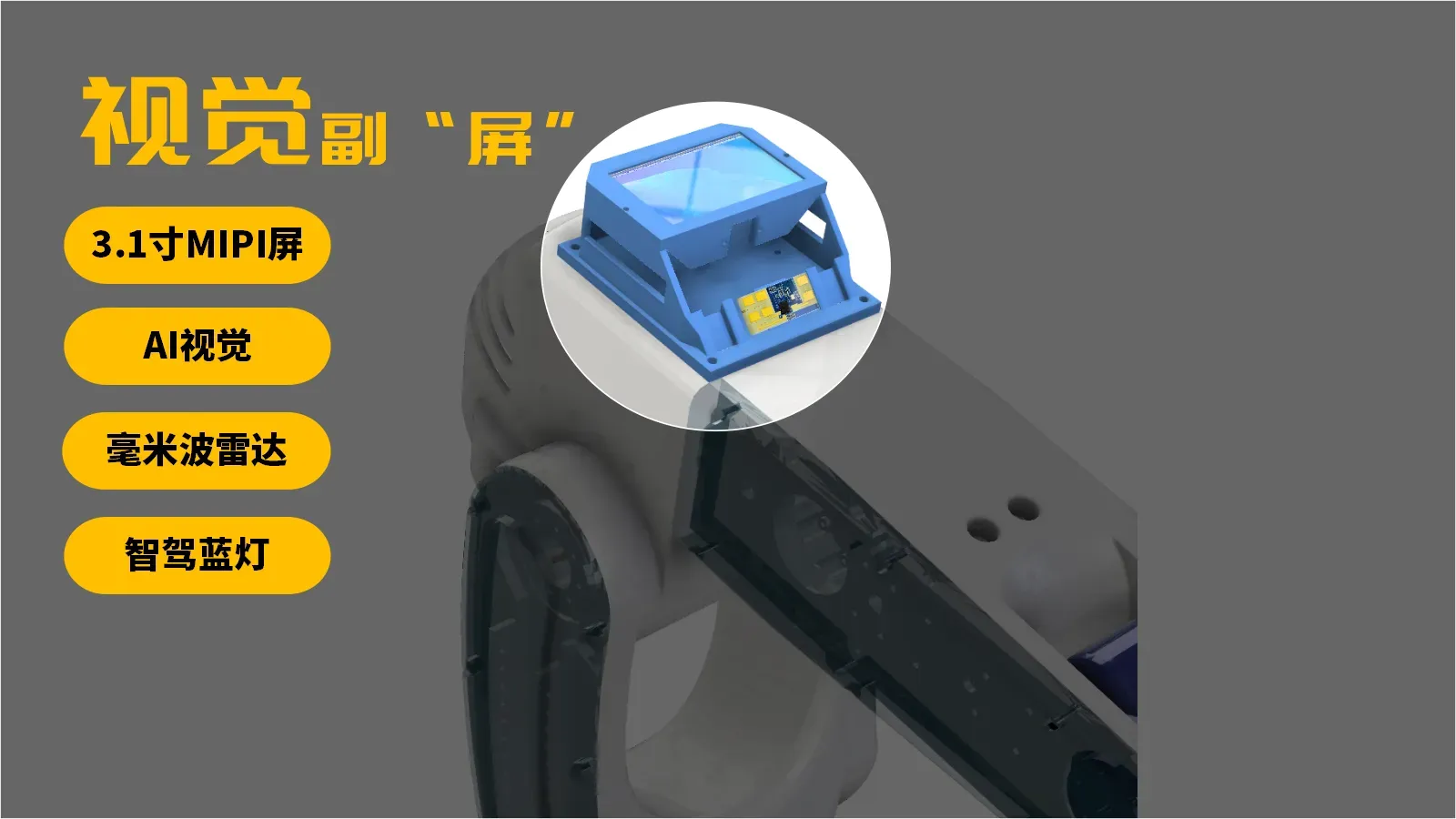
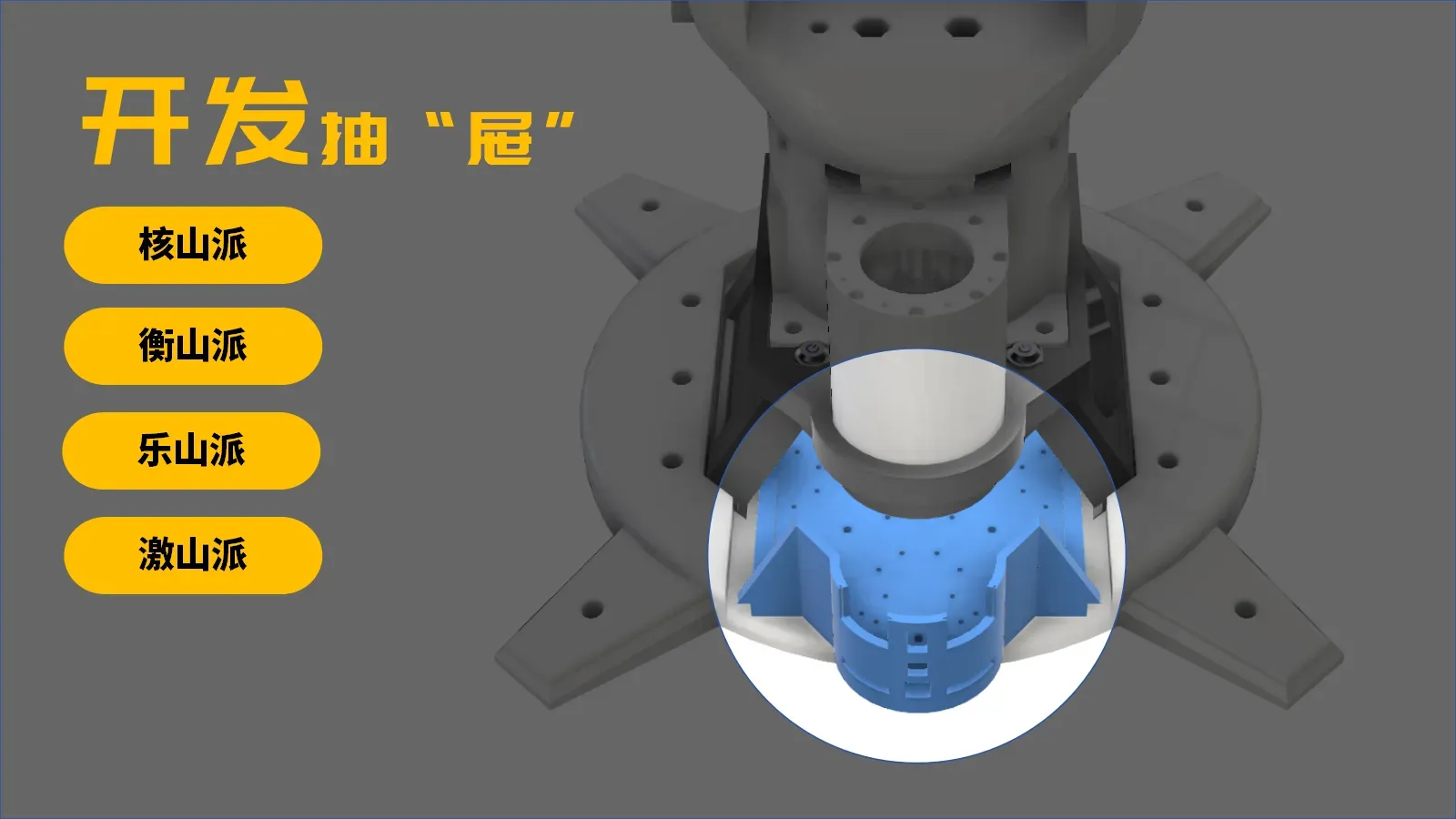
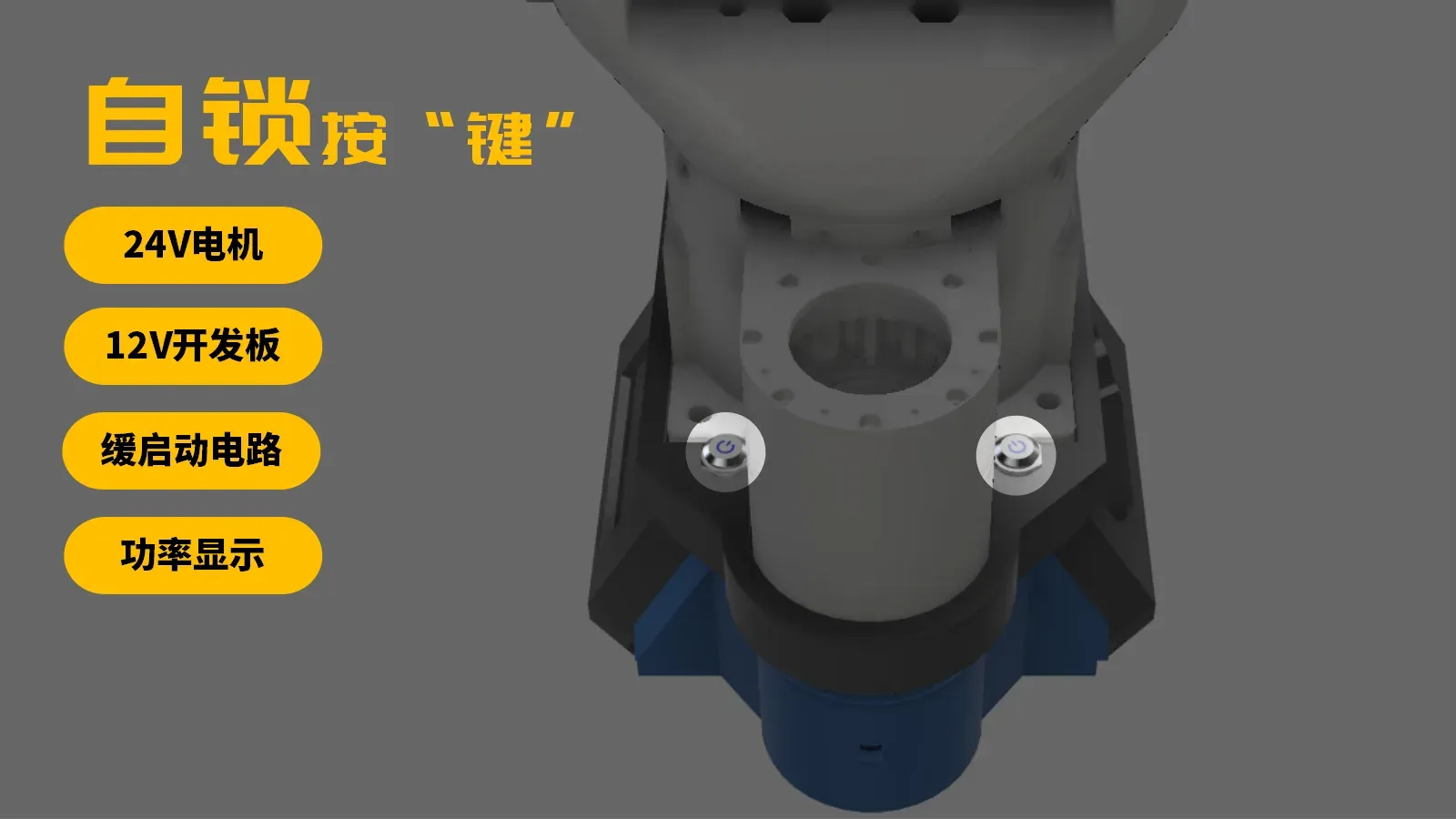
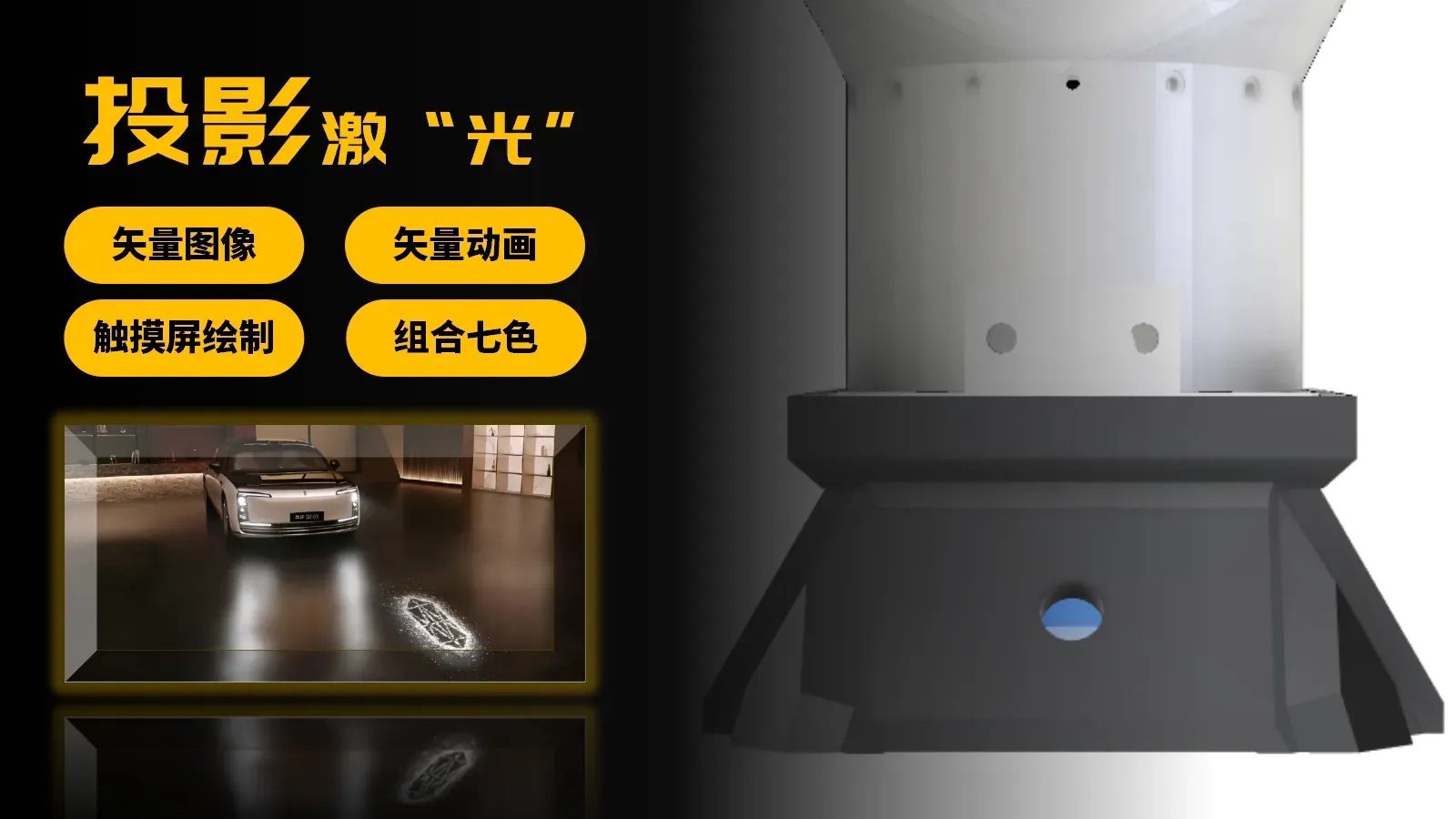
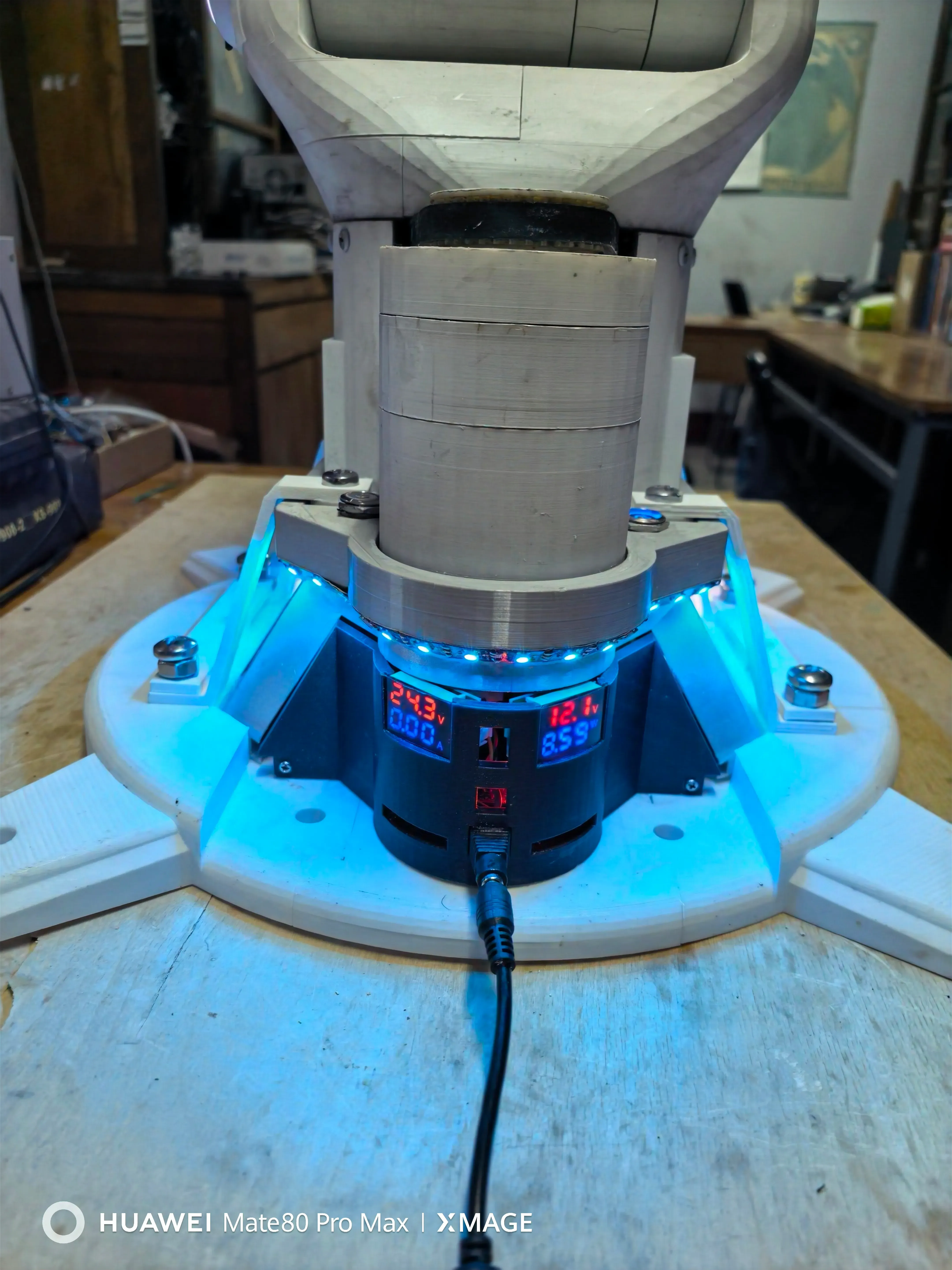
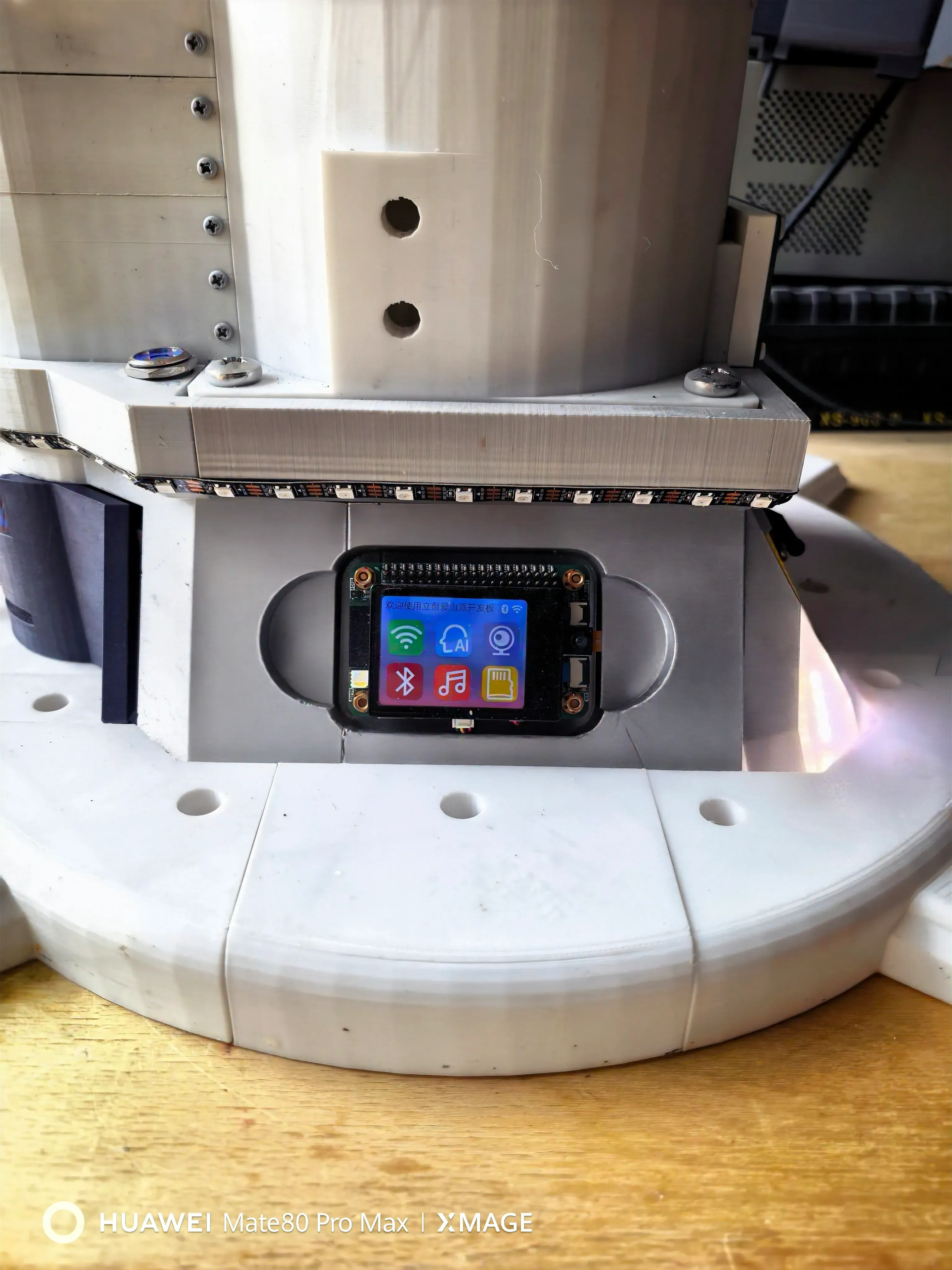
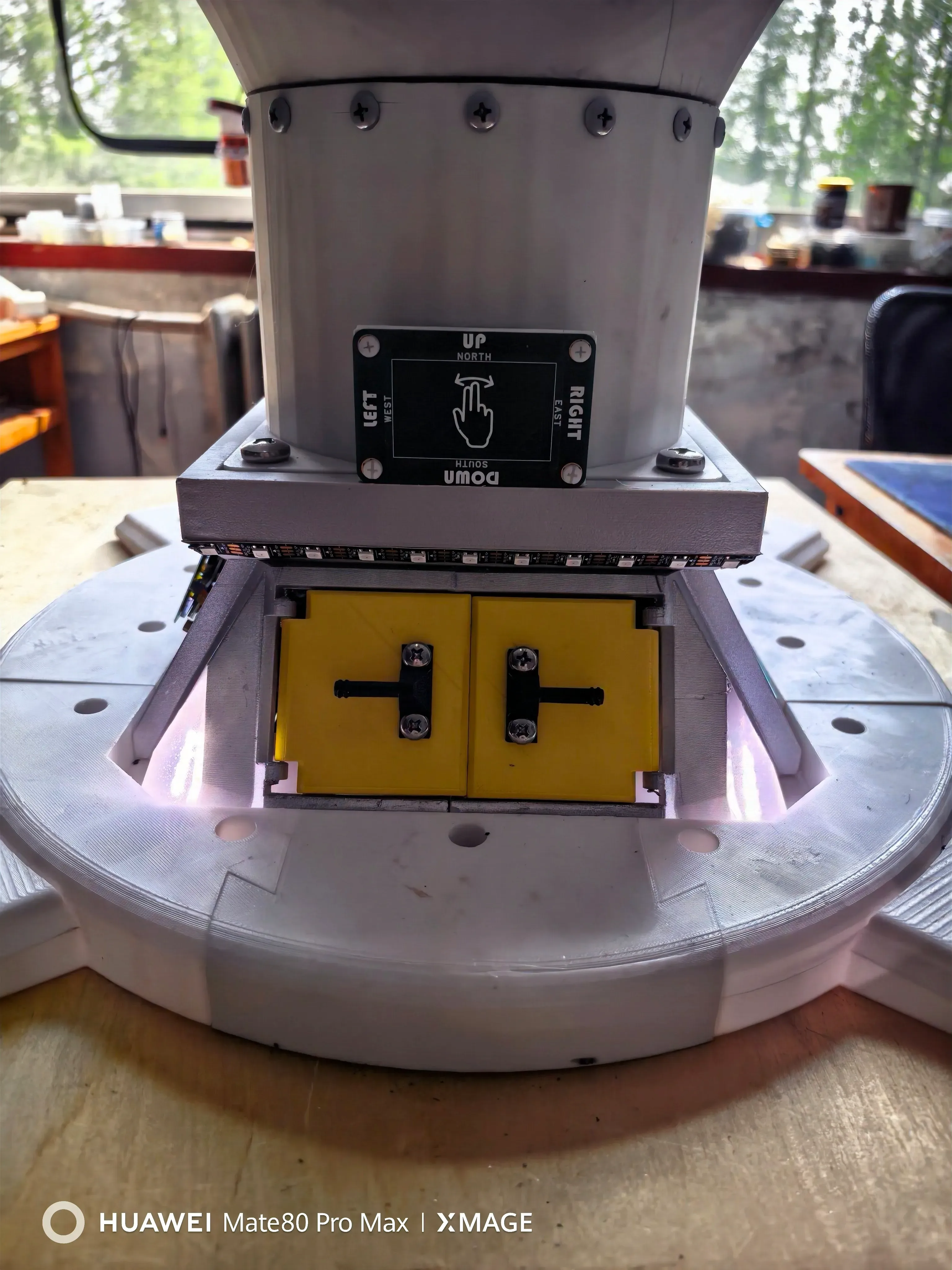
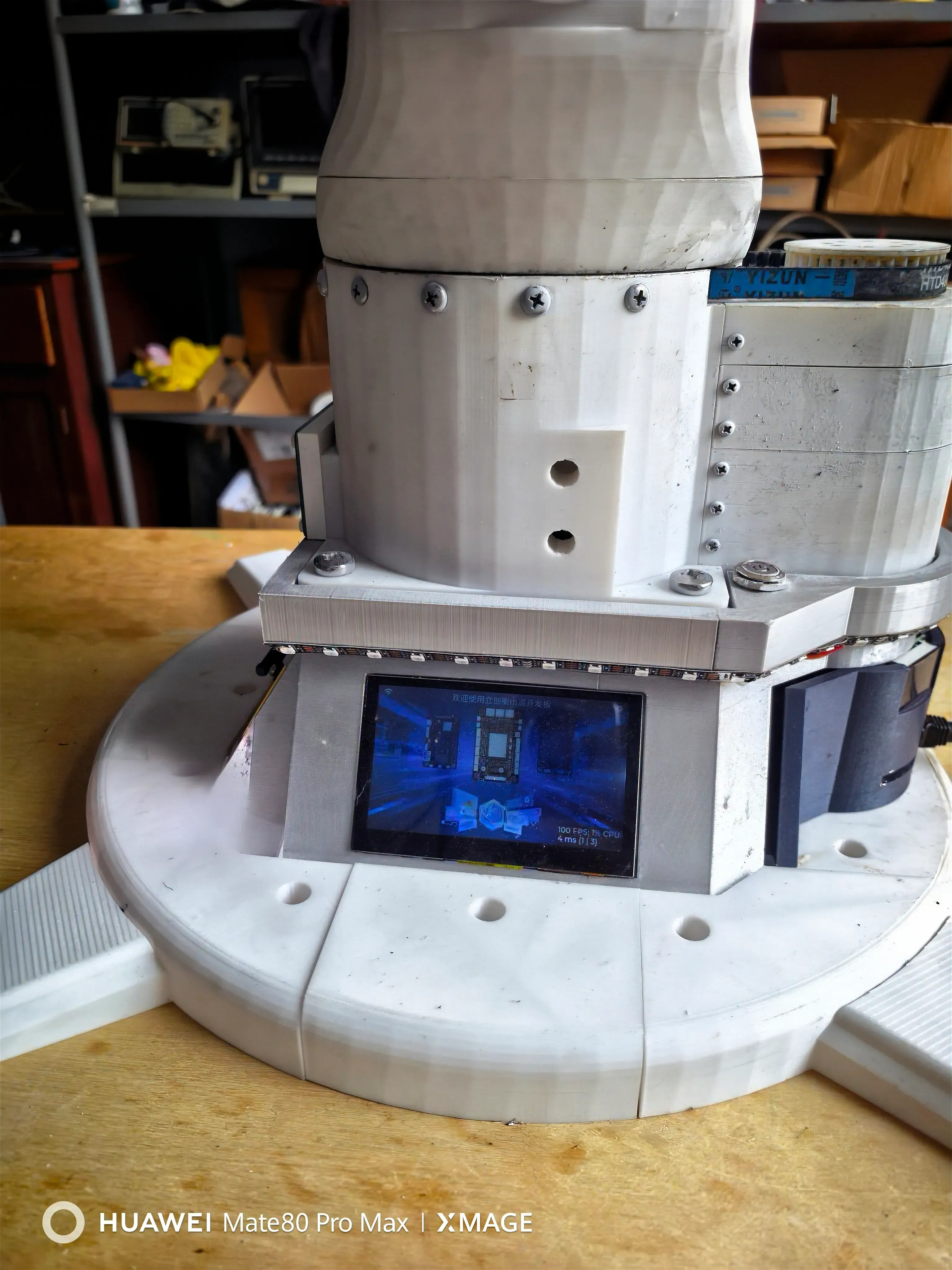
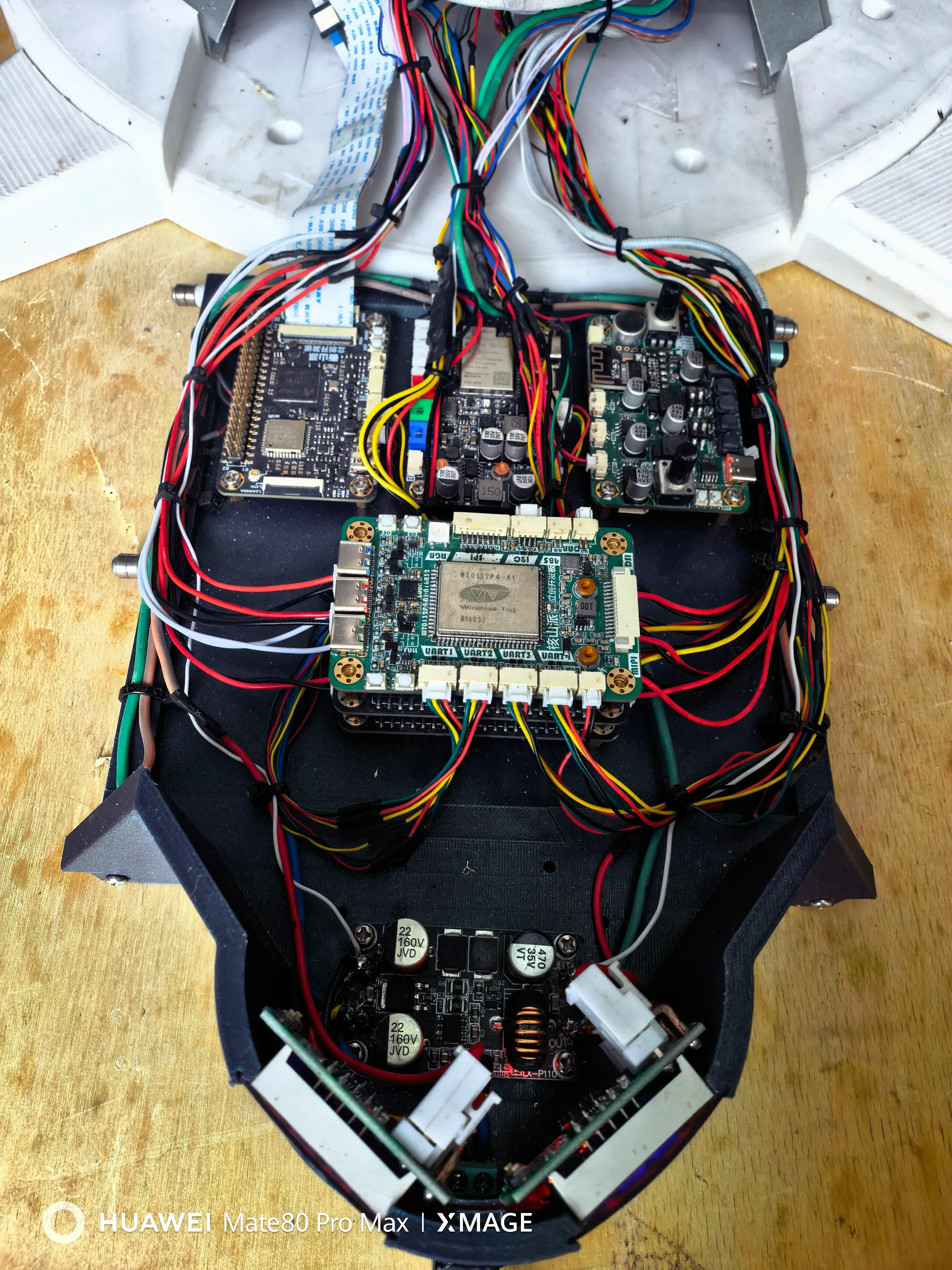
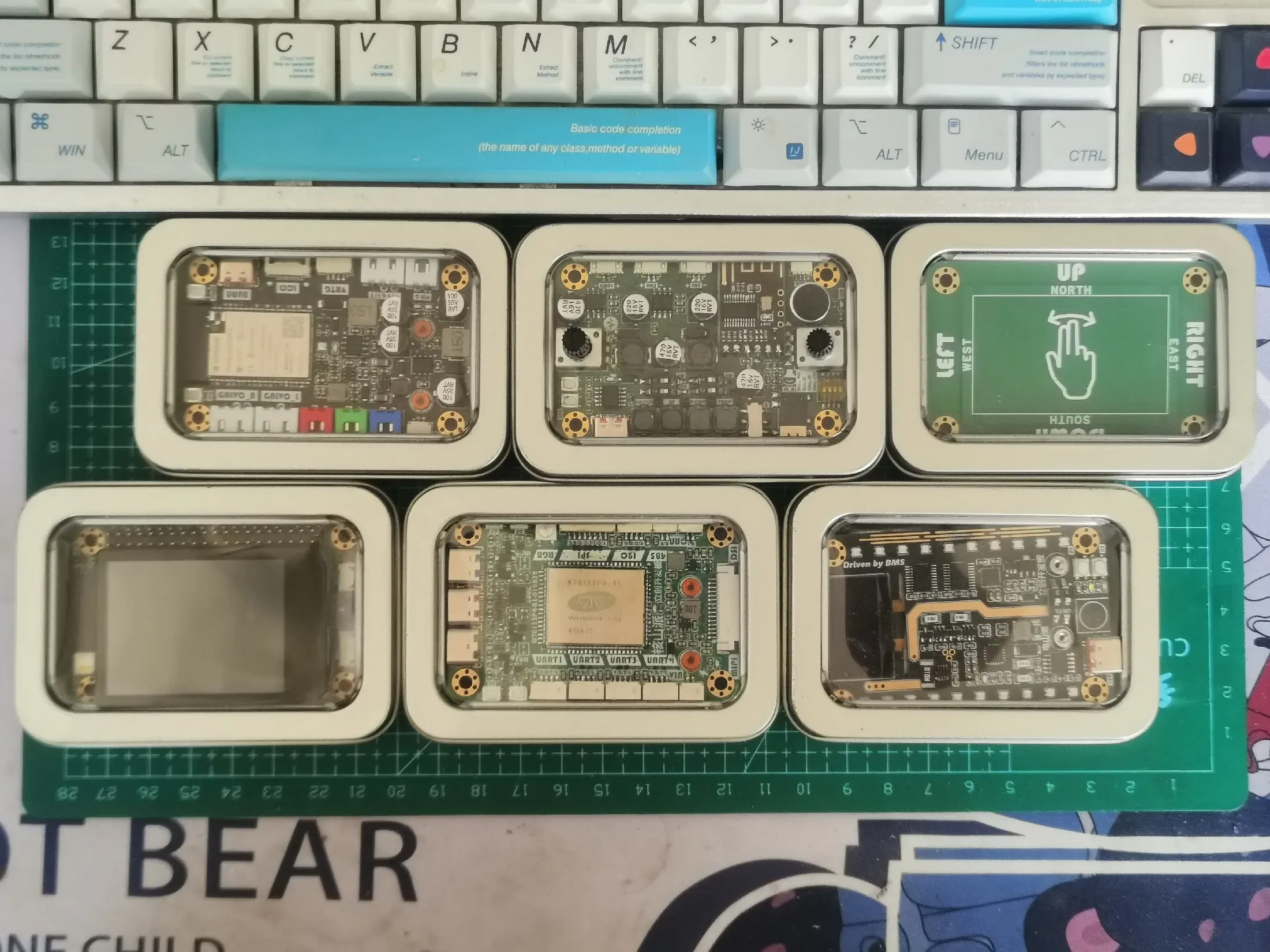
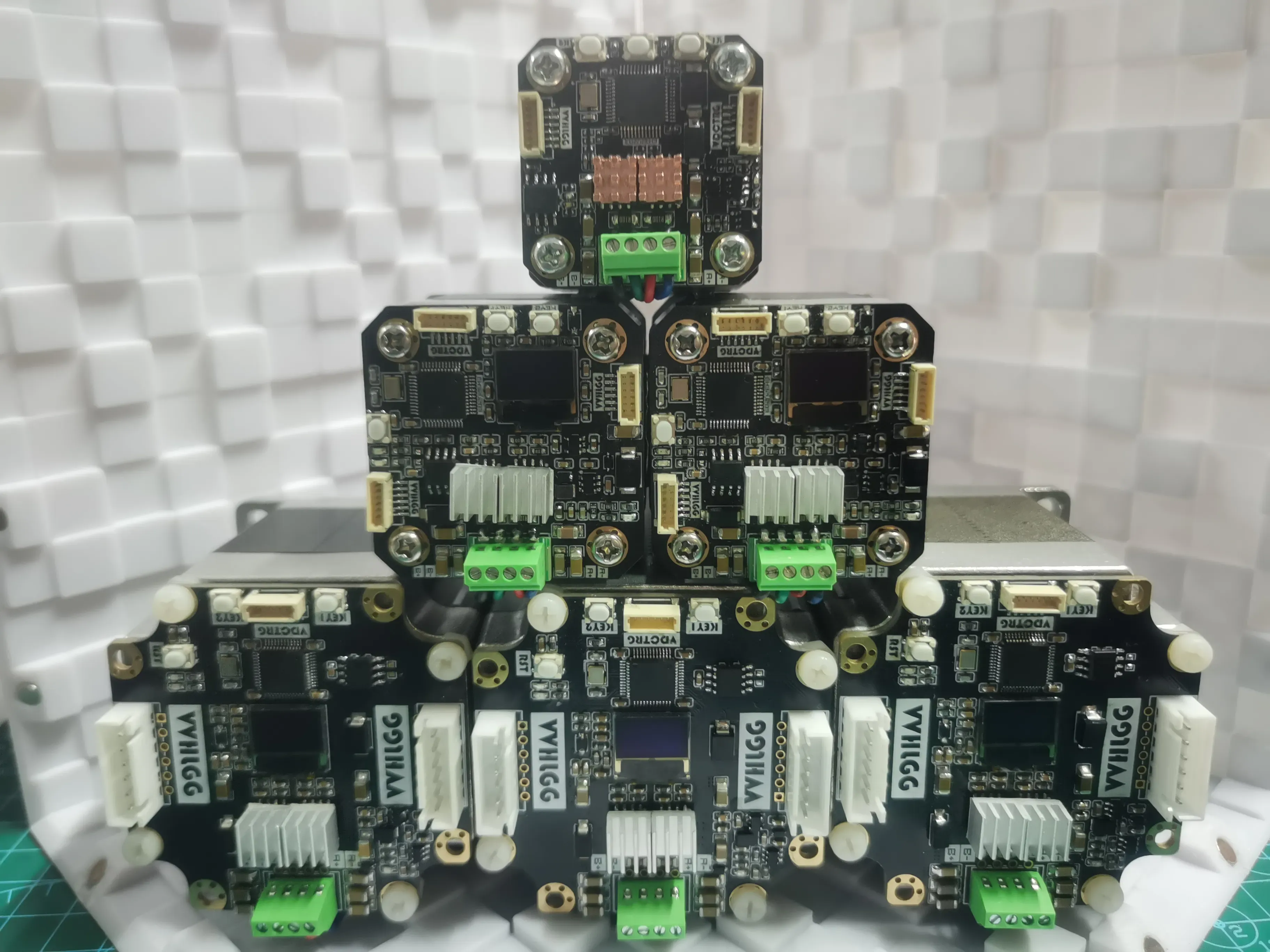
设计基于【核山派】、【爱山派】、【电山派】、【乐山派】、【势山派】、【激山派】、【衡山派(官方)】、【庐山派(官方)】、【泰山派(官方)】、【黄山派(官方)】......和【闭环步进驱动】开发的具身AI六轴机械臂,主要由采集终端、控制终端和显示终端组成。信息采集包含有声音、图像、手势、雷达等几个部分,每个检测单元都配备各自开发板。控制终端由核山派通过CAN通信串级连接1个35步进电机、2个42步进电机、3个57步进电机,闭环步进驱动采用横波斩流方案配合FOC算法实现力矩、速度、位置三环控制,并且PID可调。显示终端则是由爱山派的触摸2.0寸LCD、衡山派的触摸4.3寸LCD,同时通过核山派可连接手机蓝牙APP,作为终端上位机显示与操控。
【X山派】为可选项,后期会加入...
项目参数
X山派⛰️
> 为了保持45mm×70mm的黄金比例板框尺寸,以下板子都将命名为xx派或x山派。
-
x山派命名规则是:依据板子用途取其一个字作为x(例如:AI→爱→爱山派)。
-
xx派命名规则是:1.基于官方立创开发板的扩展板(例如:地阔星→焊接派);2.仿照官方立创开发板做的设计(例如:梁山派→电创派)。
> 💖代表开发或学习难度指数,满分为8
timeline
title 项目1、2、3、...
2023.1 : 瓦力派
: 瓦力机器人
2023.10: 电创派【V10】【V20】
: 无
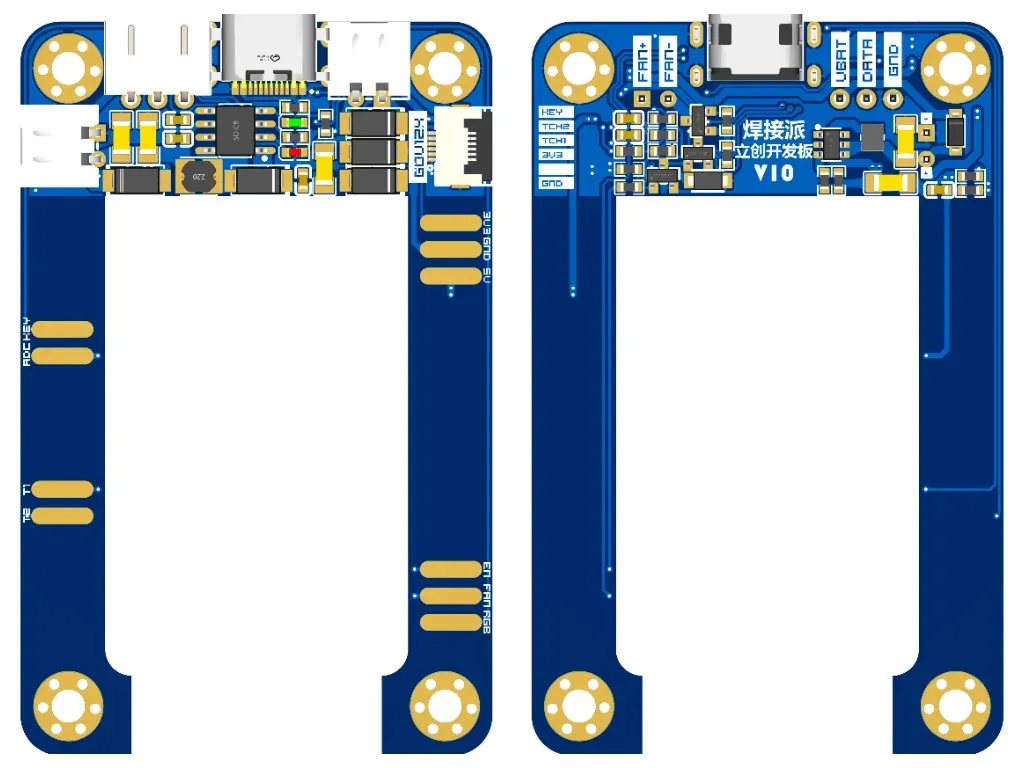
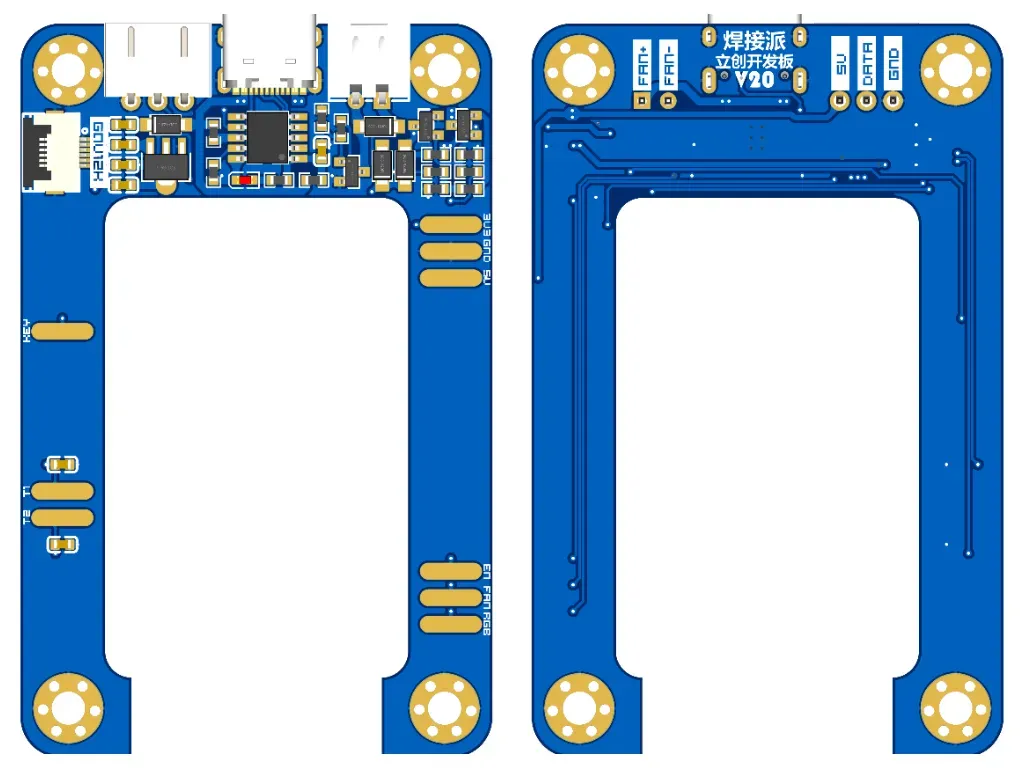
2025.6 : 焊接派【V10】【V20】
: 焊接收纳屋
xxxx.x : 敬请期待...
: 敬请期待...
| 💖💖💖💖 | 💖💖💖 | 💖💖 | |
|---|---|---|---|
 |   |   |  |
timeline
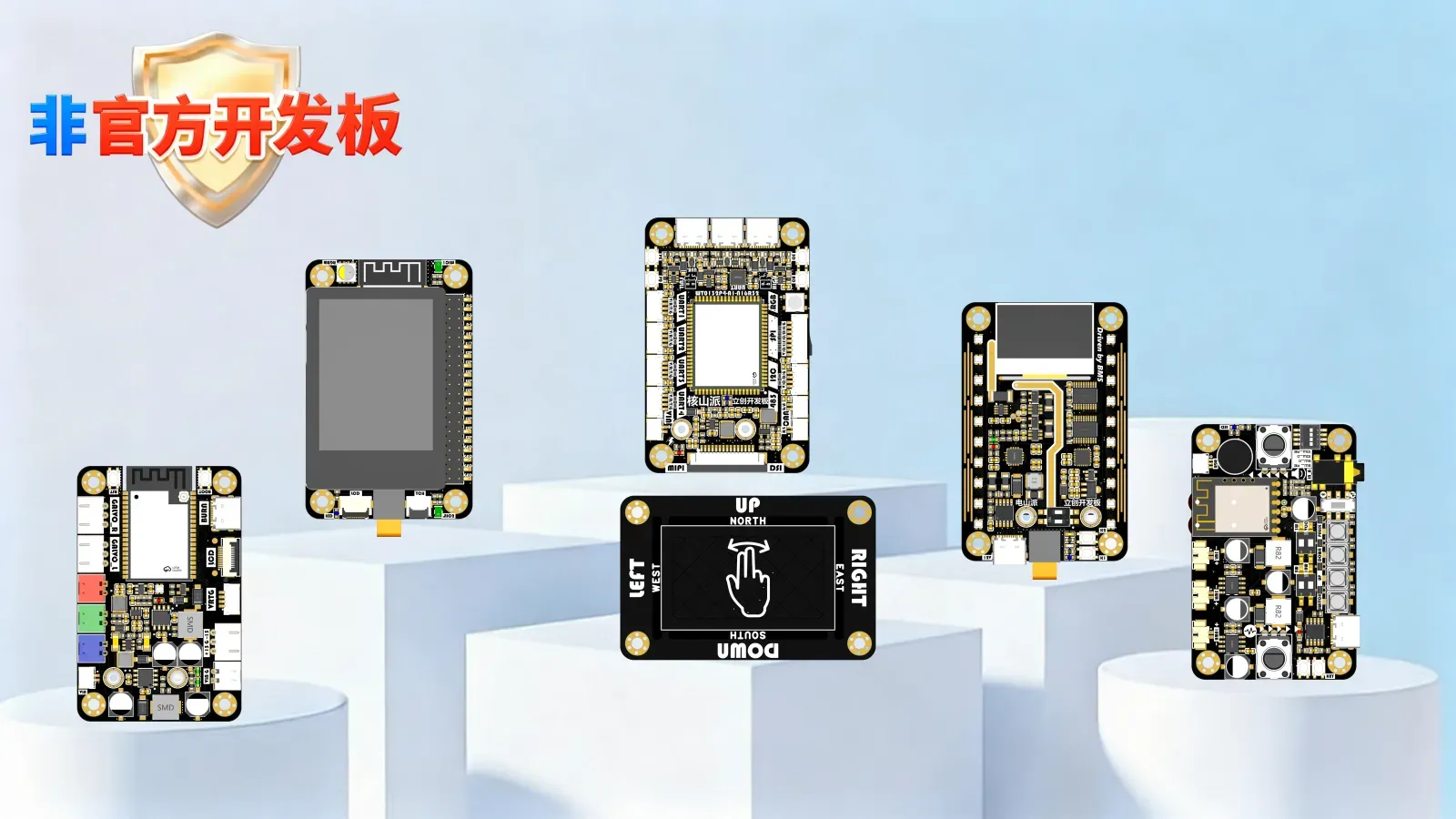
title 本项目【非官方开发板】
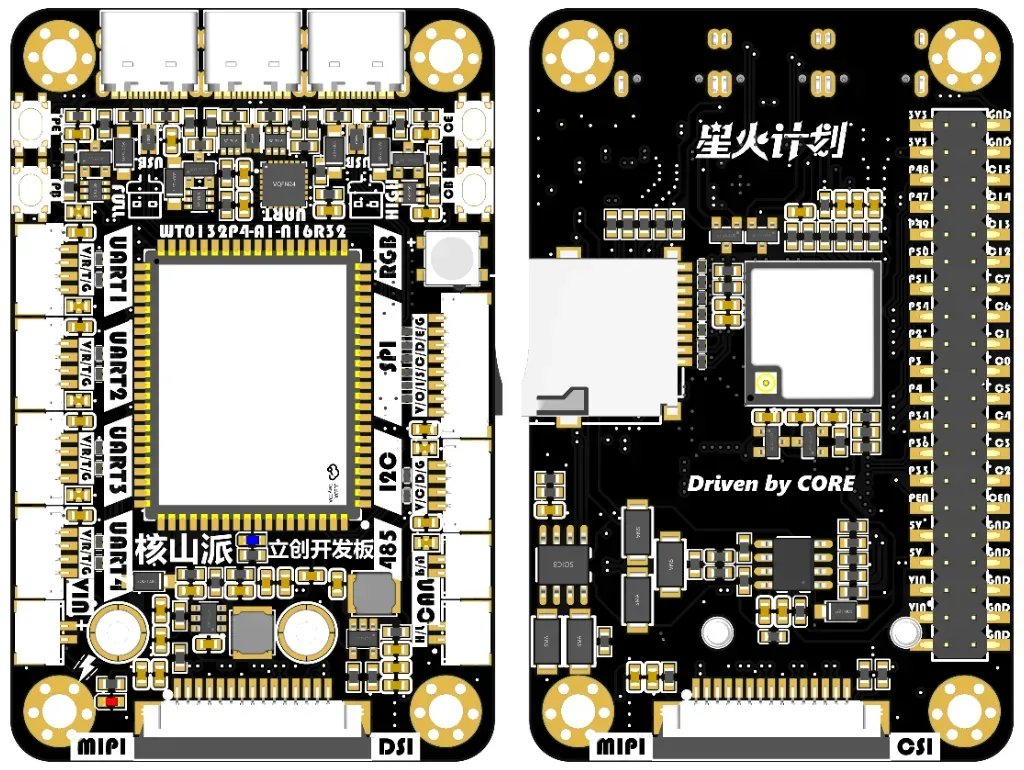
2025.12 : 核山派
: 具身AI六轴机械臂
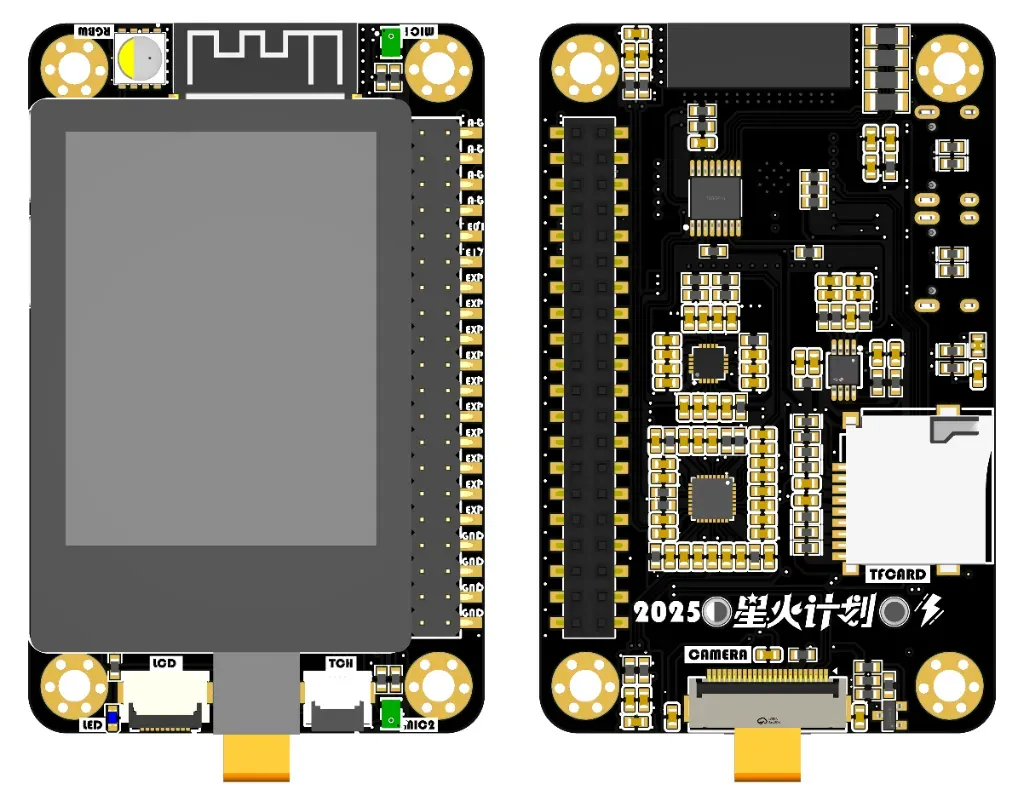
2025.12 : 爱山派
: 具身AI六轴机械臂
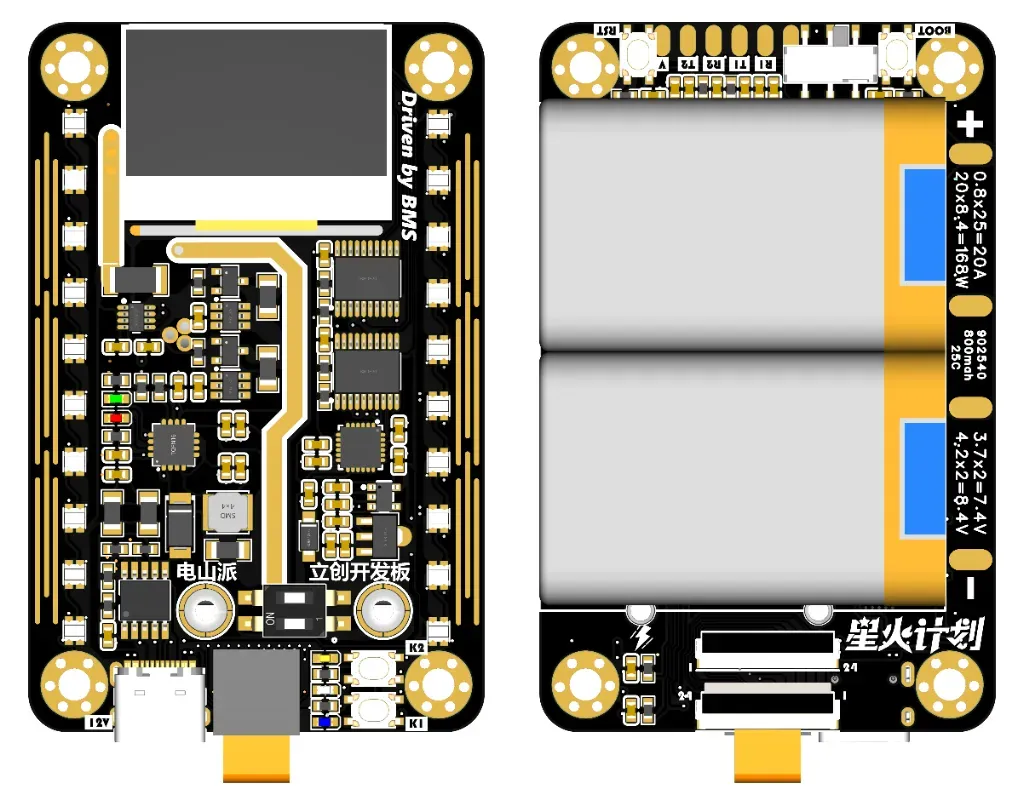
2025.12 : 电山派
: 具身AI六轴机械臂
2025.12 : 乐山派
: 具身AI六轴机械臂
2025.12 : 势山派
: 具身AI六轴机械臂
2025.12 : 激山派
: 具身AI六轴机械臂
| 💖💖💖💖💖 | 💖💖💖💖💖 | 💖💖💖 | 💖💖 | 💖💖💖 | 💖💖💖 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
timeline
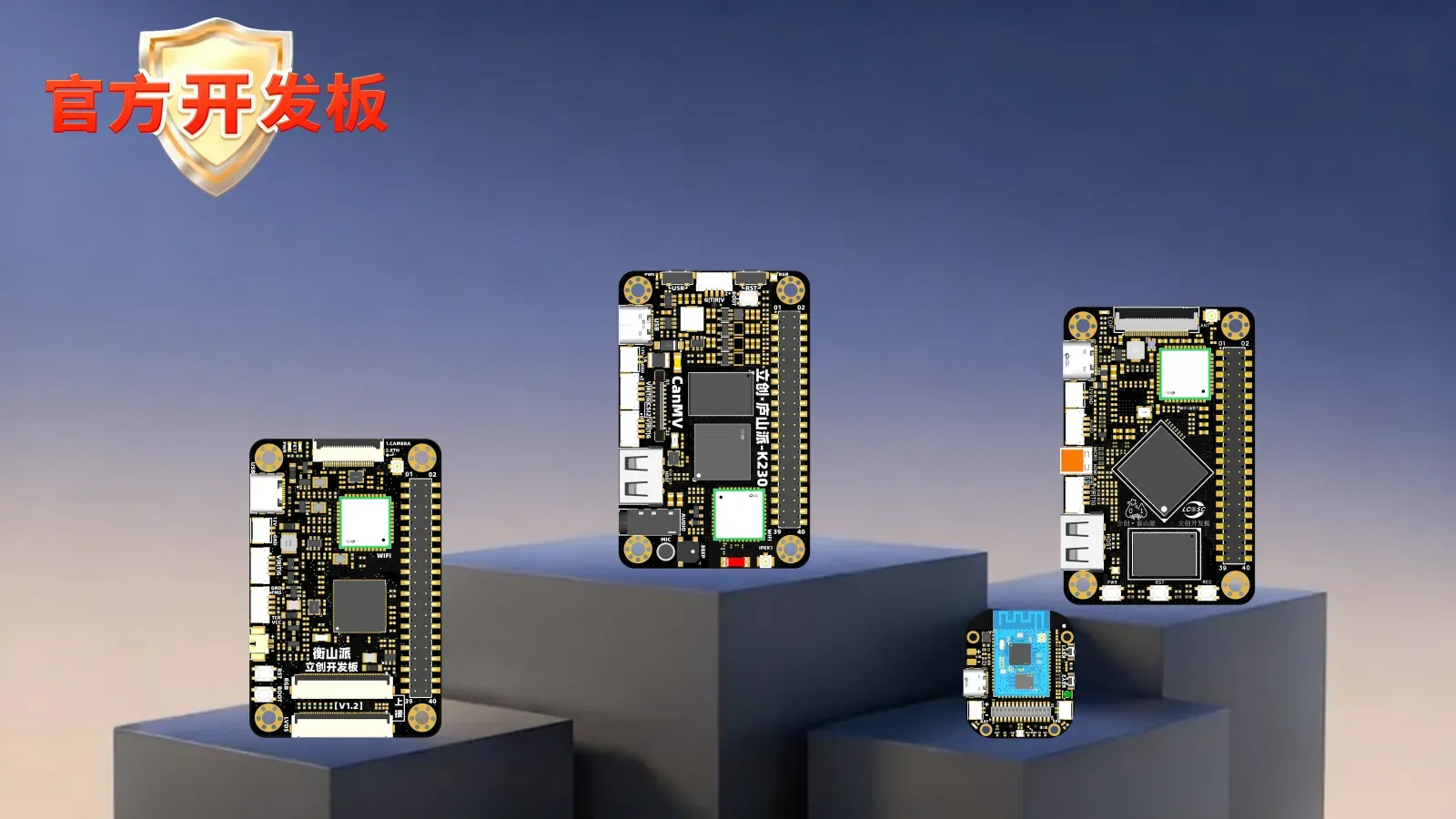
title 本项目【官方开发板】
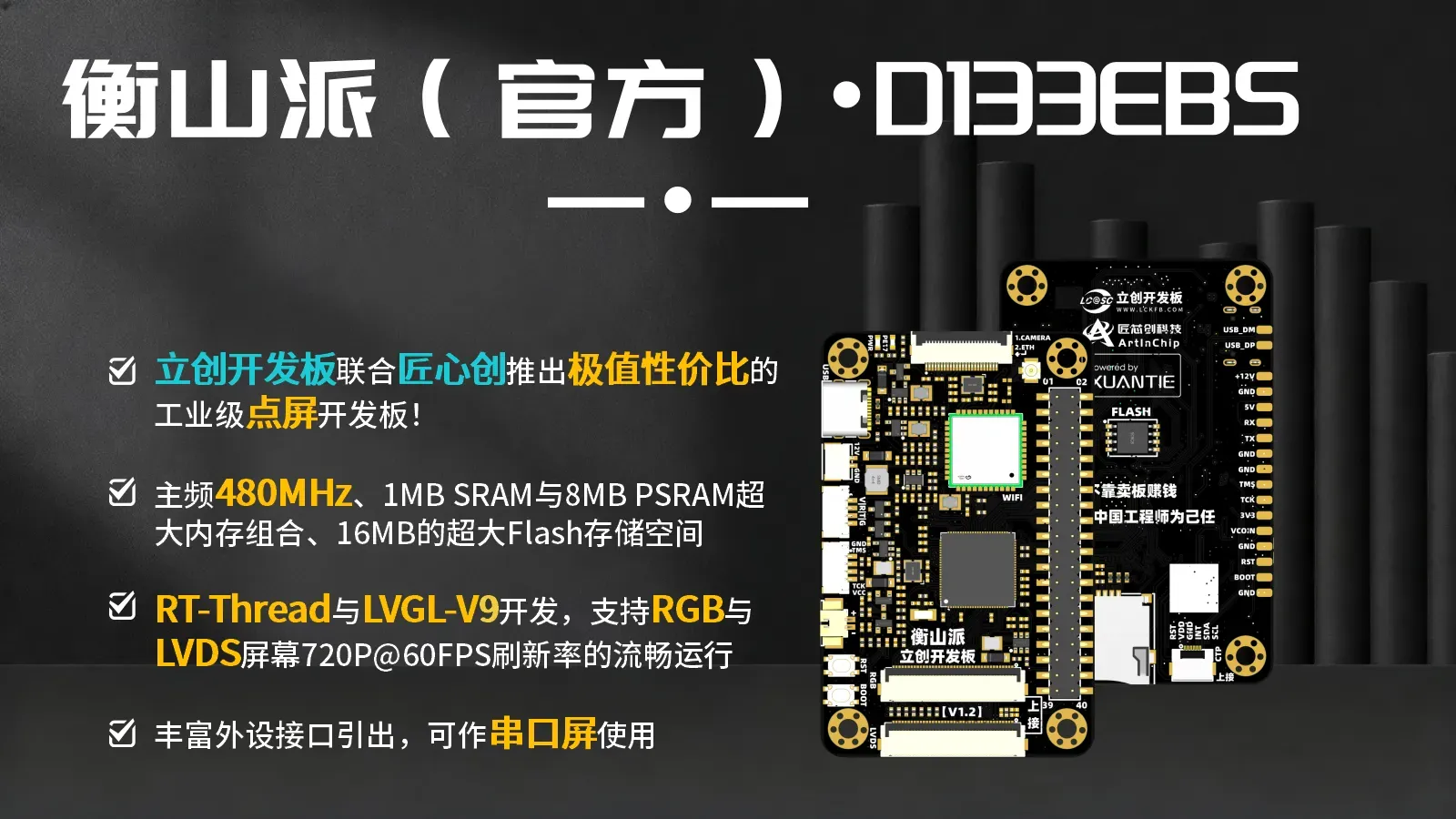
2025.12 : 衡山派
: 具身AI六轴机械臂
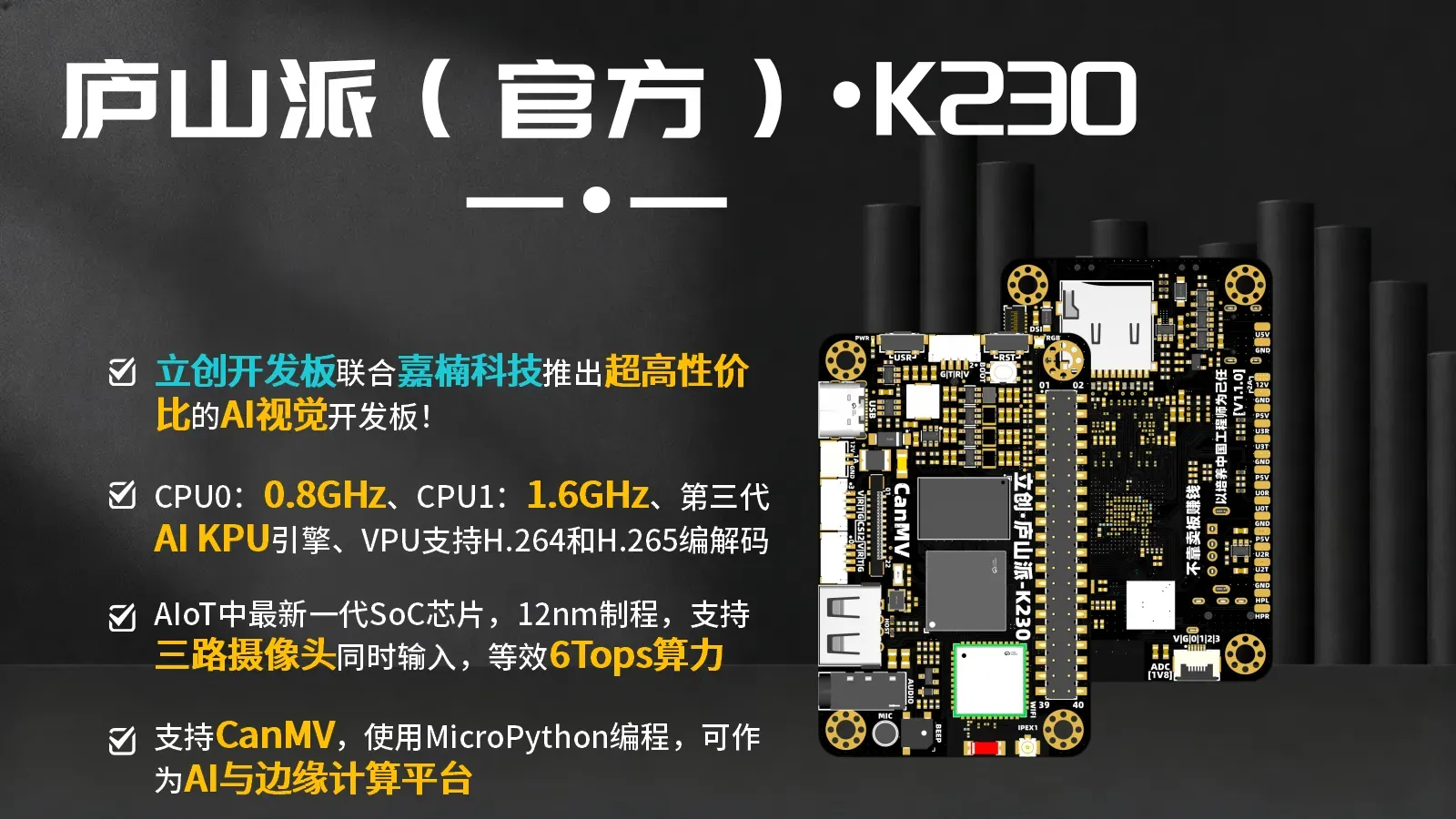
2025.12 : 庐山派
: 具身AI六轴机械臂
2025.12 : 泰山派
: 具身AI六轴机械臂
2025.12 : 黄山派
: 具身AI六轴机械臂
| 💖💖💖💖 | 💖💖💖💖💖💖💖 | 💖💖💖💖💖💖💖💖 | 💖💖💖💖💖💖 |
|---|---|---|---|
 |  |  |  |















项目参考🚩
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
知识产权声明&复刻说明
本项目为开源硬件项目,其相关的知识产权归创作者所有。创作者在本平台上传该硬件项目仅供平台用户用于学习交流及研究,不包括任何商业性使用,请勿用于商业售卖或其他盈利性的用途;如您认为本项目涉嫌侵犯了您的相关权益,请点击上方“侵权投诉”按钮,我们将按照嘉立创《侵权投诉与申诉规则》进行处理。
请在进行项目复刻时自行验证电路的可行性,并自行辨别该项目是否对您适用。您对复刻项目的任何后果负责,无论何种情况,本平台将不对您在复刻项目时,遇到的任何因开源项目电路设计问题所导致的直接、间接等损害负责。









